引言
机械臂是现代工业和科研领域中的重要工具,它们在制造业、医疗、农业、教育等多个领域都有广泛的应用。这些机器臂不仅可以进行精密操作,而且能够在人类无法进入的危险环境中工作,大大提高了工作效率和安全性。然而,传统的机械臂控制方式往往需要专业知识和复杂的编程,这在某种程度上限制了其普及和应用。因此,手机APP控制机械臂的方法应运而生。手机APP控制的优点在于,它可以使非专业人士也能方便地操控机械臂,同时,通过手机APP,用户可以远程控制机械臂,极大地提高了操作的便利性和灵活性。本文的目的是深入探讨这这个主题,今天我将用MyCobot Controlller APP 使用手机来控制myCobot 320 M5Stack。
介绍
myCobot 320
myCobot 320是一款面向用户自主编程开发的六轴协作机械臂,内置运动学正逆解算法,开放ROS仿真开发环境,配备12个标准的24V工业IO接口,可扩展开发PLC控制编程。myCobot 320的工作半径可达到350mm,末端能够承受最大负载1kg,能够控制重复定位精度在0.5mm的范围内。

myCobot Controller
“myCobot Controller ”是由大象机器人公司推出的一款专门用于控制myCobot系列机械臂的应用程序。这款APP采用了蓝牙技术,能够通过用户的手机或平板电脑与myCobot机械臂进行无线连接。

myCobot Controller APP的工作原理主要基于蓝牙通信技术。通过跟myCobot机械臂进行蓝牙匹配,成功后就可以通过APP来控制机械臂的各项功能,这种方式不仅操作简便,而且能够实现实时的,无线控制,大大提高了操作的灵活性和便捷。
APP控制机械臂的步骤
接下来我们会一边操作,一边介绍这个功能如何该使用。
安装APP
目前myCobot Controller目前只支持安卓系统的手机使用,IOS系统用户需要暂时等待一段时间。点击连接可以直接跳转至下载地方,目前有两种方式可以安装app,第一种可以直接在Google play store上搜索mycobot controller下载,第二种是可以在官网下载apk到手机上直接安装。(正常下载之后安装即可)Google Play下载连接:https://play.google.com/store/apps/details?id=com.elephantrobotics.mycobot_controller

Downloads - Elephant Robotics
连接机械臂
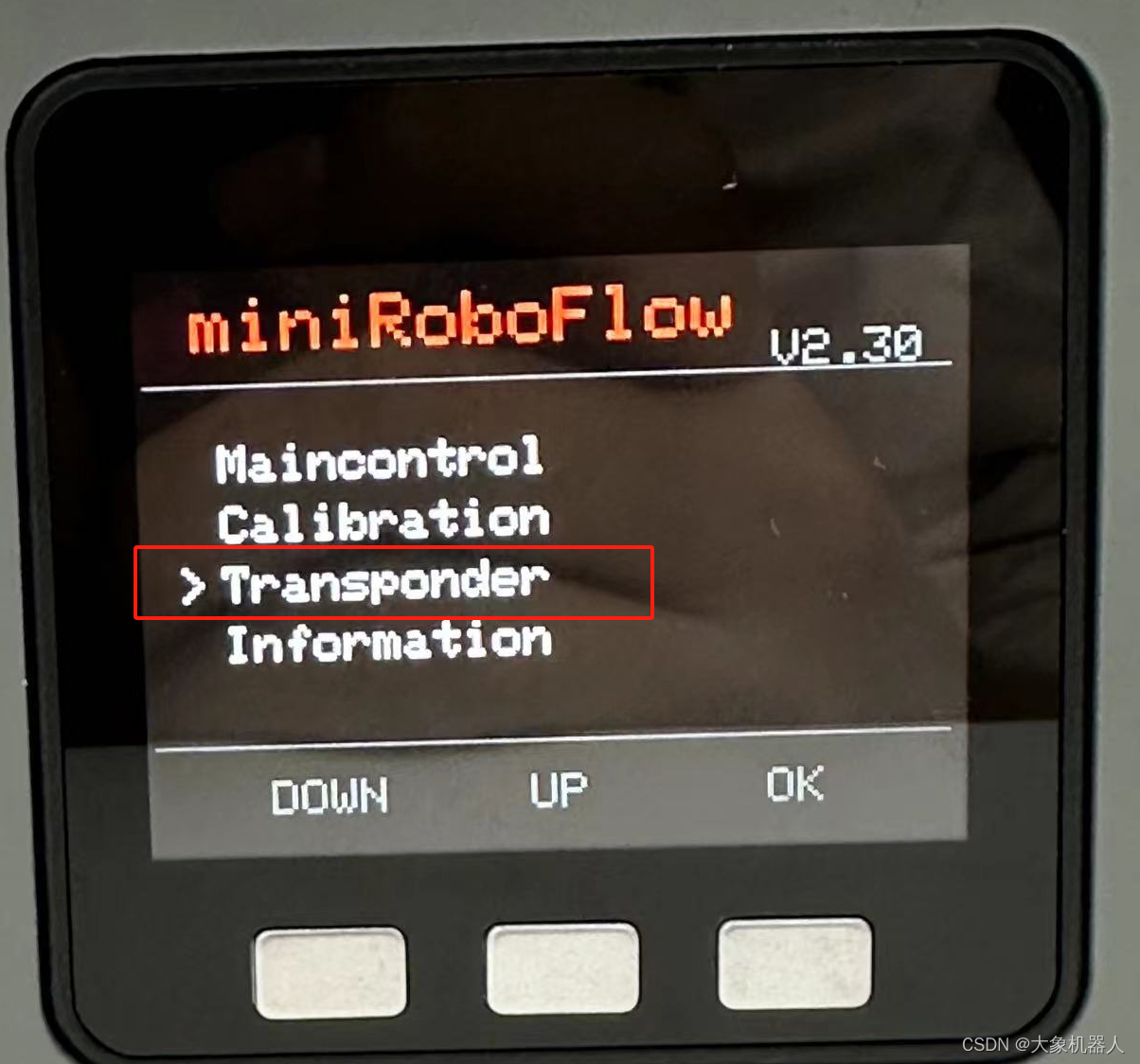
首先我们给myCobot 接上电源开机 ,选择“Transponder”。
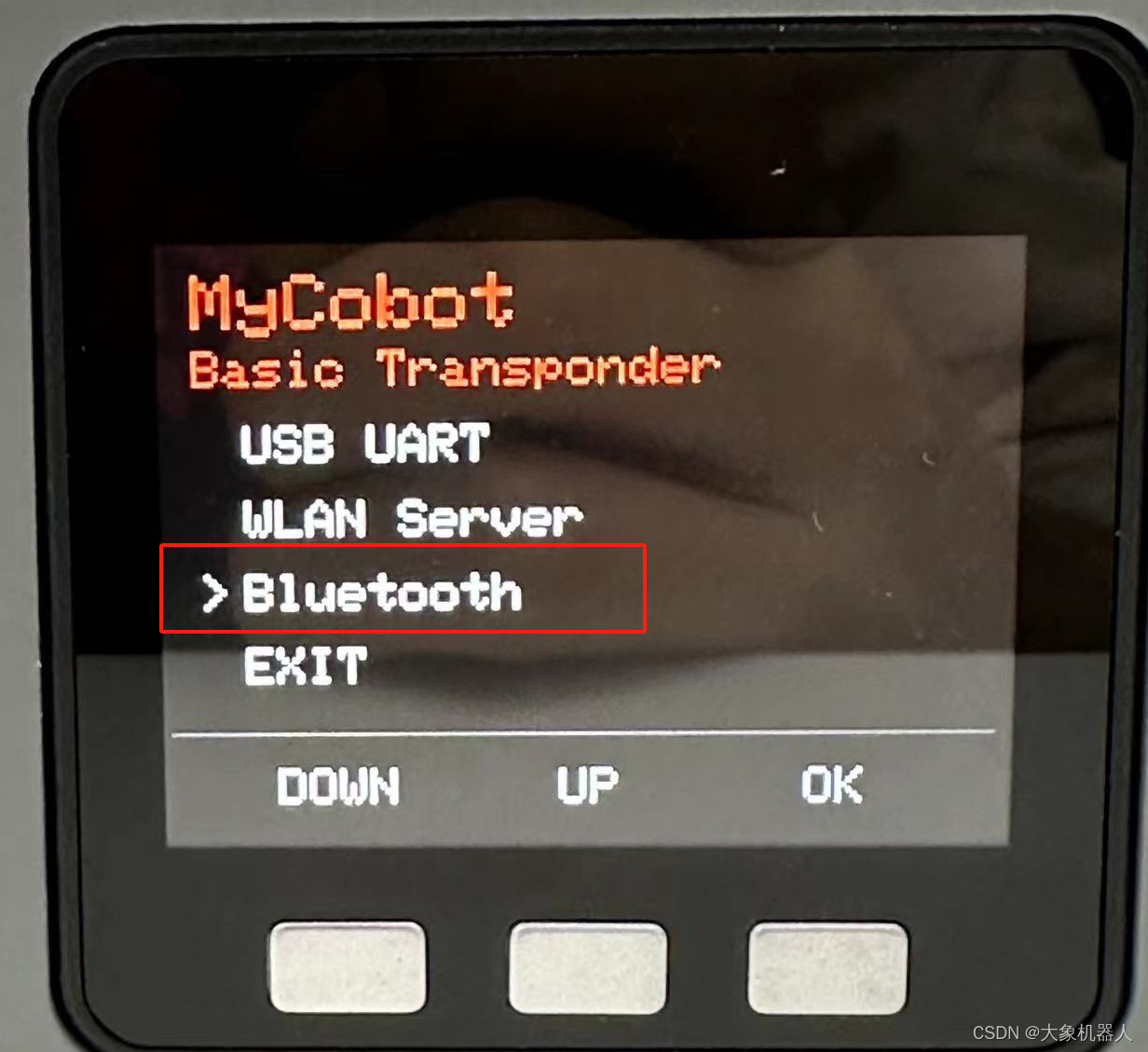
进入之后,我们选择蓝牙模式,”Bluetooth“
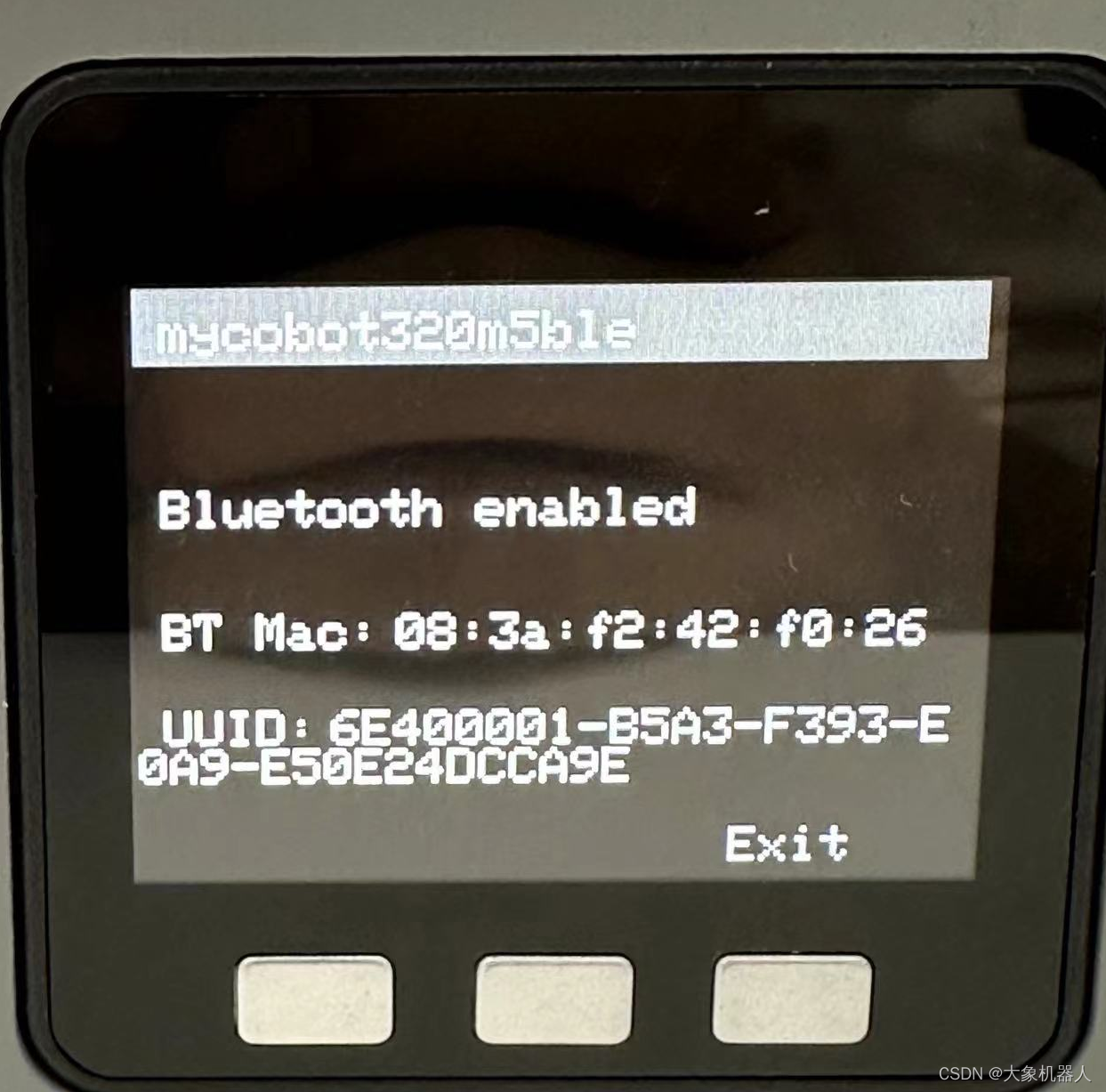
成功之后的界面是会出现下图的情况。蓝牙的名称是:mycobot320m5ble,它的mac地址是:08:3a:f2:42:f0:26(每台机器是不一样的,方便区分同时有两台机器开着在那)进入这个页面我们等待就好了,接下来是手机上的操作。
打开下载好的APP,点击蓝牙的图标连接mycobot。
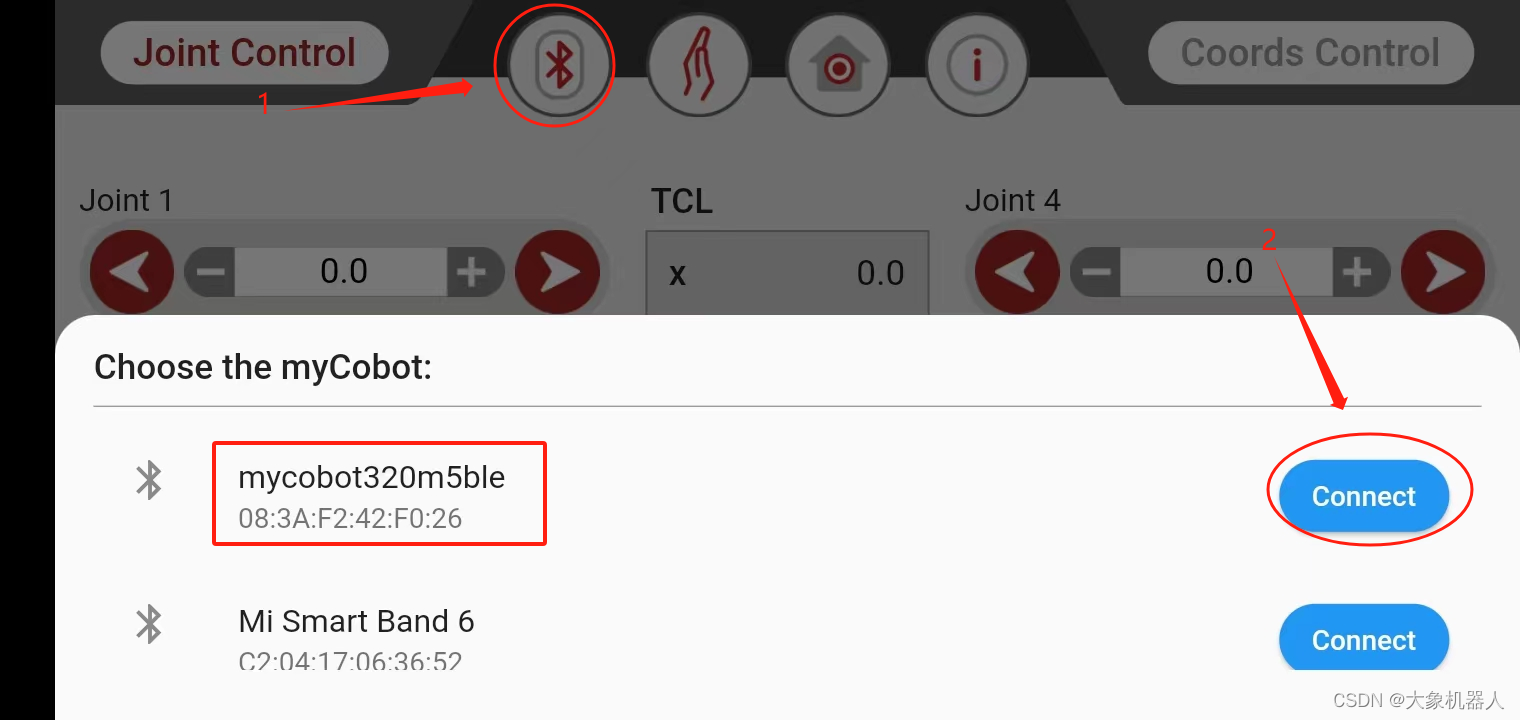
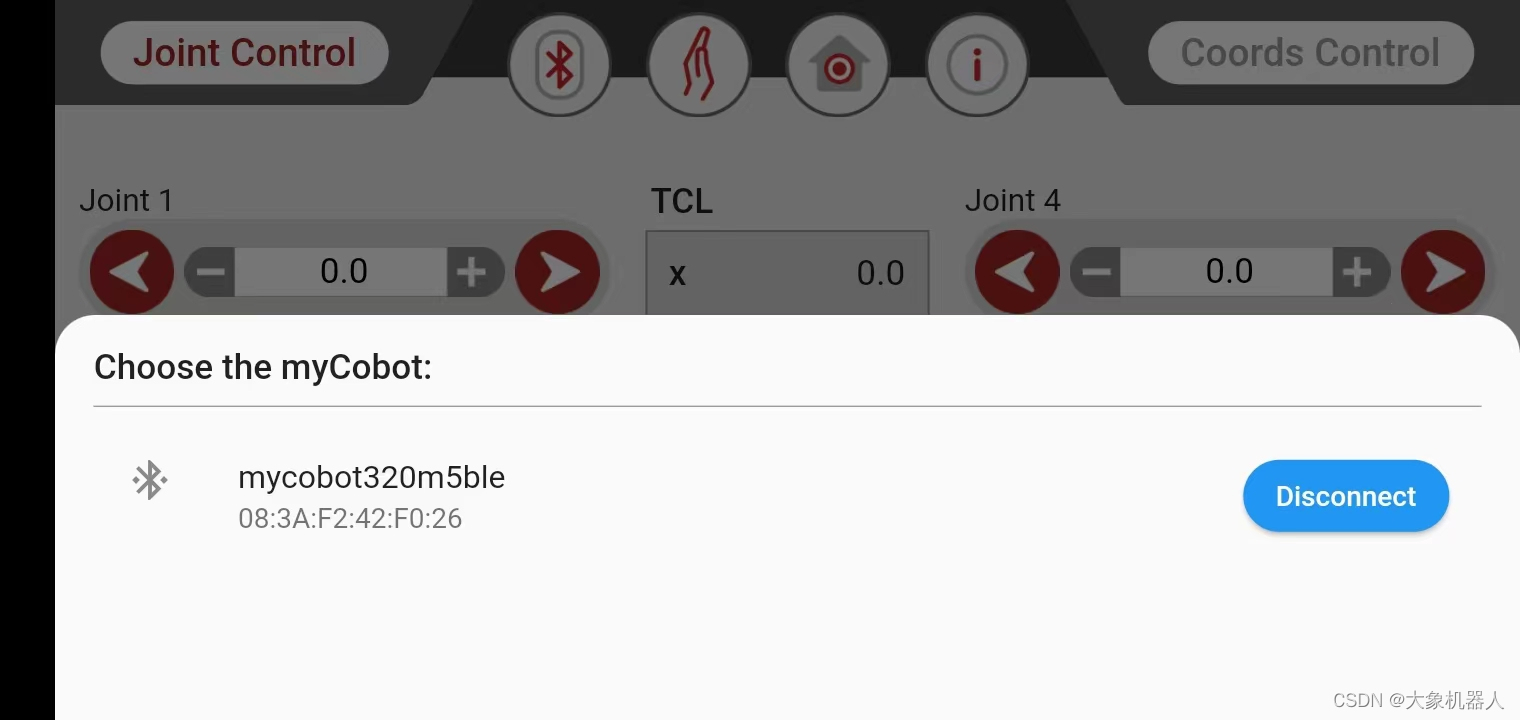
看准确蓝牙的名称对应机械臂的名称,“mycobot320m5ble”,不确定的话看mac地址,mac地址是唯一的。显示下图的情况就连接成功了。
机械臂运动控制
APP是用机械臂的正逆运动学来控制的主要分为两种,一种是机械臂角度的控制,另一种是机械臂坐标的控制。
Joint Control
角度控制是正运动学算法的一种控制方式。正运动学是指已知机器人各个关节的参数(角度)的情况下,计算机器人末端执行器的位置和姿态的过程。换句话来说就是,通过旋转角度就能计算出机械臂末端的在空间中的坐标位置。

左右两边的Joint N(1-6),是可以增加大小来控制对应mycobot关节的角度。中间的TCL部分的六个参数代表的是此时机械臂末端的笛卡尔坐标值。
Coords Control
坐标控制是逆运动学算法的一种控制方式。逆运动学是指已知机器人末端执行器的坐标位置,计算出该状态下机器人各个关节的参数(角度)。就可以通过调整机器人末端坐标来移动机器人,从而计算出当前状态下机器人关节角度的参数。

左边的按钮很好理解,对应着机械臂的末端在空间的位置,上下左右走直线运动。换句话话说就是机械臂的末端在空间中进行,向前,向后,向左,向右,向上,向下运动,主要是走直线运动。在笛卡尔坐标当中,‘Rz,Ry,Rx'通常用来表示围绕z轴,y轴,x轴的旋转,这些旋转通常遵循右手规则,即如果你的右手的四指按照旋转方向卷曲,那么你的大拇指指向的方向就是旋转轴的方向。
通常来说:
- "rz":围绕z轴旋转。这会导致机械臂末端在x-y平面内旋转,也就是说,它会改变末端执行器的偏航角(yaw angle)。
- "ry":围绕y轴旋转。这会导致机械臂末端在z-x平面内旋转,也就是说,它会改变末端执行器的俯仰角(pitch angle)。
- "rx":围绕x轴旋转。这会导致机械臂末端在y-z平面内旋转,也就是说,它会改变末端执行器的滚转角(roll angle)。
简单点说,就是机械臂围绕x,y,z轴做旋转。
操作视频
接下来我们来看一下如何操作的。
link:https://youtu.be/8JBhk55pz8I
总结
总的来说手机APP控制提供了一种更直观、更易于理解的操作方式,使得非专业人士也能够快速上手,其次我们还能够通过远程操控机械臂,这使得在一些复杂或者危险环境中也能够操控机械臂,能够扩增机械臂的适用场景。
目前来说APP的功能还能够进行增加,你觉得有什么需要的功能增加在APP上呢?欢迎在下方留言,我们一起探讨APP的功能优化!如果你喜欢这篇文章,点赞和留言是对我们最大的支持!