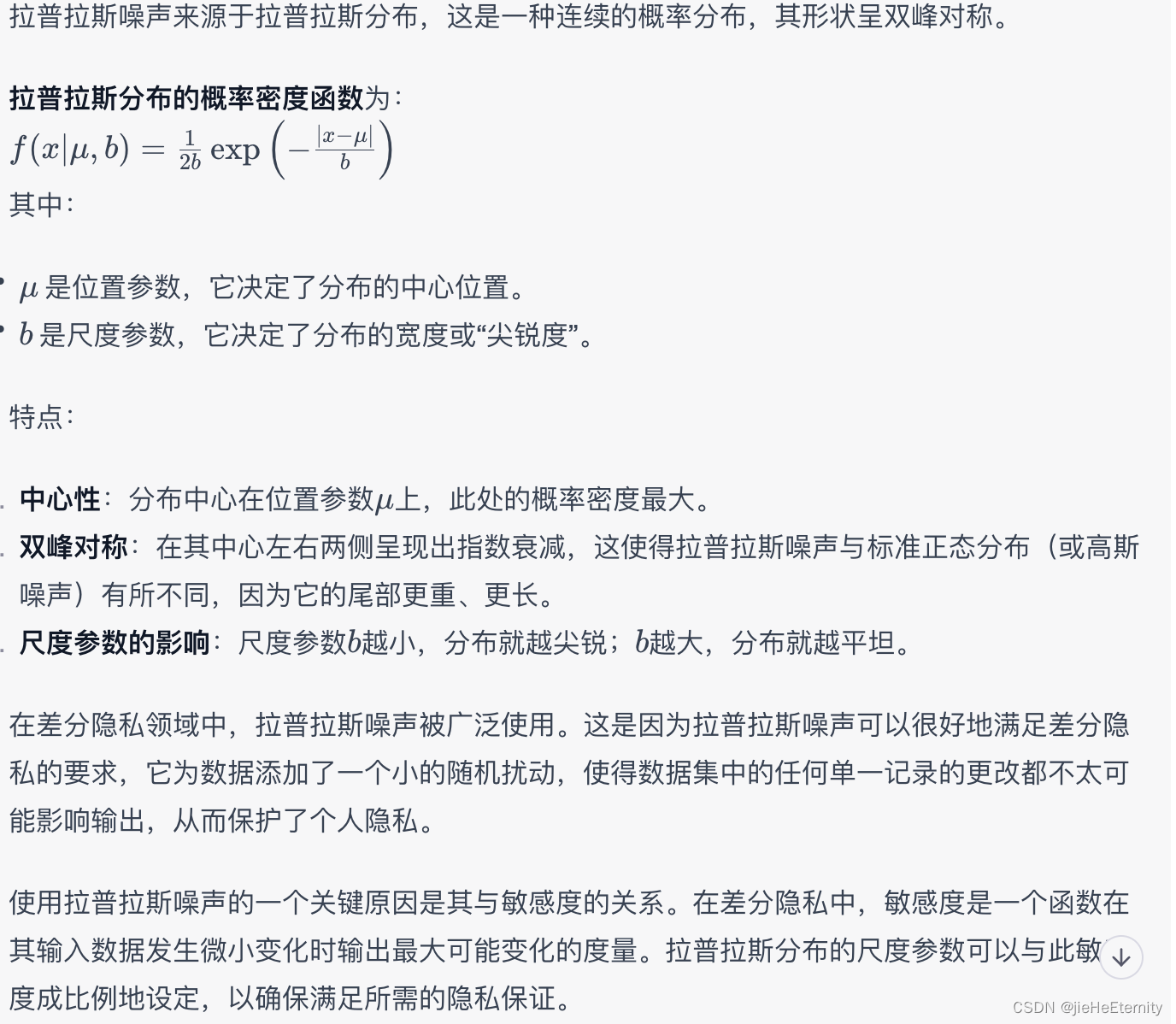
拉普拉斯噪声是指从拉普拉斯分布中抽取的随机变量。拉普拉斯分布是一种连续型概率分布,其概率密度函数为:
拉普拉斯噪声在差分隐私(Differential Privacy)领域中被广泛使用,原因有以下几点:
-
灵活性:拉普拉斯噪声可以根据需要调整其尺度参数 b b b,从而控制噪声的大小。较大的尺度参数会产生较大的噪声,反之亦然。
-
数学性质:拉普拉斯噪声的数学形式简单且对称,这使得它在计算和理论分析中都很方便。
-
差分隐私的要求:在差分隐私的框架下,拉普拉斯噪声具有一种特殊的属性,使其能够为数据提供一定级别的隐私保护。具体来说,给定一个查询的敏感性和期望的隐私参数,可以计算出一个合适的尺度参数 b b b 来满足这个隐私需求。
-
对于计数查询的适应性:对于计数查询(即输出的是数据集中满足某个条件的元素数量),拉普拉斯噪声提供了一个很好的方式来确保结果的隐私性,同时尽量减少噪声对准确性的影响。
-
对于非连续数据的适应性:与高斯噪声相比,拉普拉斯噪声在处理非连续数据时具有更好的性质。
拉普拉斯噪声主要的两个参数
- 位置参数(μ):这就像是你原始的体重数字,它决定了噪声的“中心”在哪里。
- 尺度参数(b):这个参数决定了噪声的“大小”或者说“强度”。如果b很大,那么你加入的随机扰动就可能很大,如随机加或减10公斤。而如果b很小,那扰动就可能只有几百克。
拉普拉斯噪声就好比一个有点特殊的“随机扰动”。当你想保护某些敏感数据不被完全暴露时,你可以加入这种“随机扰动”,这样原始数据就会被扰动,从而增加了数据的隐私性。想象一下,如果你有一个准确的体重数字,为了不让别人知道你的确切体重,你可以随机地加或减几公斤,那么给出的数字就是被拉普拉斯噪声“扰动”过的。
以一段简单的代码解释拉普拉斯噪声
import numpy as np
# 定义拉普拉斯噪声的函数
def add_laplace_noise(data, epsilon, sensitivity):
"""
添加拉普拉斯噪声
:param data: 原始数据
:param epsilon: 隐私预算
:param sensitivity: 数据的敏感性
:return: 添加噪声后的数据
"""
# 计算拉普拉斯分布的scale参数
scale = sensitivity / epsilon
# 生成与数据相同大小的拉普拉斯噪声
noise = np.random.laplace(0, scale, data.shape)
return data + noise
# 假设我们有以下原始数据
data = np.array([10, 20, 30, 40, 50])
# 隐私预算和数据的敏感性
epsilon = 1.0
sensitivity = 1.0
# 添加拉普拉斯噪声
noisy_data = add_laplace_noise(data, epsilon, sensitivity)
print("Original Data: ", data)
print("Noisy Data: ", noisy_data)
在上述示例中,我们首先定义了一个函数add_laplace_noise,该函数可以为给定的数据添加拉普拉斯噪声。然后,我们使用了一个简单的数据数组data来展示如何调用这个函数,并输出添加噪声后的结果。
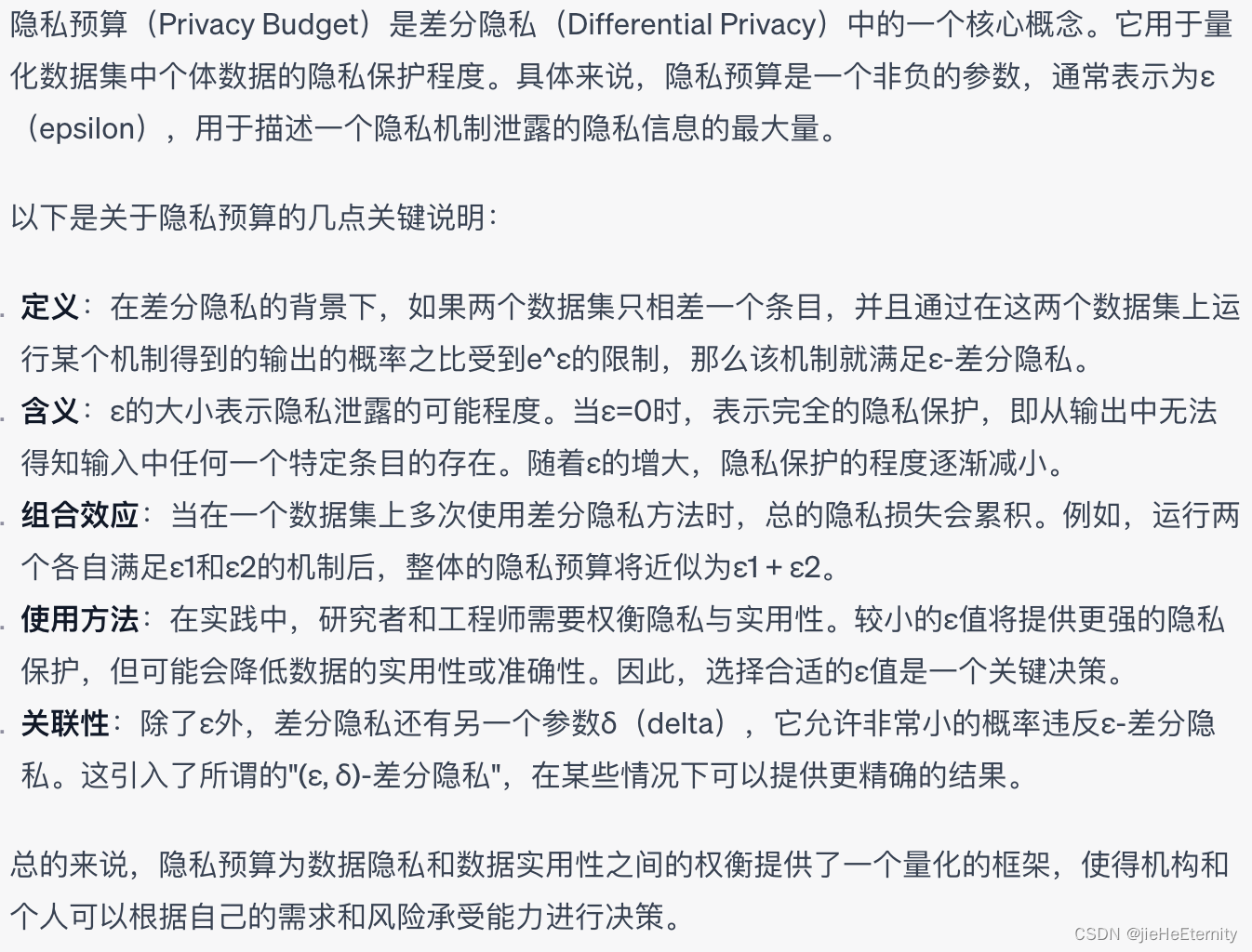
隐私预算
其他的用在差分隐私中的一些噪声特点以及其适用数据:
-
高斯噪声(或正态噪声):
优点:适用于多种数据类型,理论简单,易于实现。 缺点:可能会导致大的误差,尤其是当标准差较大时。 适合的数据:连续数据,如图像、声音和时间序列数据。 -
拉普拉斯噪声:
优点:在差分隐私中非常受欢迎,因为其与数据的敏感度有关,并能提供强隐私保证。 缺点:可能会导致数据的过度扭曲,尤其是当数据敏感度较高时。 适合的数据:计数、度量数据。 -
指数噪声:
优点:提供强隐私保障。 缺点:与其他分布相比,可能会导致更大的误差。 适合的数据:通常用于满足本地差分隐私的需求。 -
均匀噪声:
优点:简单且易于理解。 缺点:可能不适合需要精确保护的数据。 适合的数据:连续数据和分类数据。 -
伯努利噪声(或二元噪声):
优点:适用于二进制数据。 缺点:仅限于二进制数据。 适合的数据:二进制数据或布尔值。 -
泊松噪声:
优点:适用于计数数据。 缺点:可能会导致计数的过度扭曲。 适合的数据:计数数据或事件频率。 -
盐和胡椒噪声:
优点:模拟图像损坏的真实效果。 缺点:可能会严重损坏图像的可读性。 适合的数据:图像数据。