Arena
起源于计算内核关于堆内存使用的相关优化。
系统调用分配和回收内存的开销较大,一个优化是预先通过系统调用分配一大块内存,然后每次内存使用从大块内存中切出一小份内存使用。
Arena用于维护大块内存切分出来的大量小块内存,达到高效分配和释放内存的效果。
C++的malloc API封装了Arena逻辑和内存分配系统调用。
Arena的本来含义是“竞技场”,在有的地方直接翻译为“内存池”。
Velox使用了TLSF Arena。
所以Arena算法都需要回答两个问题:
- 分配和释放内存的时间复杂度
- 内存碎片大小
常见的Arena实现
- Sequential Fit:将FreeBlock根据大小从小到大排列。分配内存时,从小到大遍历,直到找到满足要求的最小FreeBlock。
- Segragated Free Lists:分成多个FreeBlock链。每一条链维护特定大小(或者特定大小范围)的FreeBlock。分配内存时,先找到对应的链条,然后再从链条中找到合适的Block。
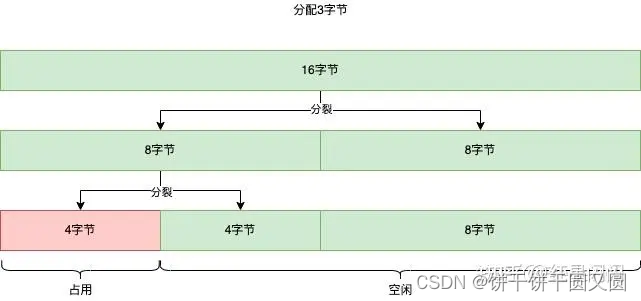
- Buddy Systems。
- Indexed Fist:FreeBlock的size为Key,FreeBlock的地址为Value,使用index(比如平衡树)维护Key。
时间复杂度对比
- Sequential Fit:O(N)顺序遍历,N是FreeBlock的个数。
- Segregated Free Lists:将其视为Sequential Fit的改进,每一个槽位不是一个Block,而是大小相同(或在一定范围内)的Block链条。当BlockSize类别较少,线性分割内存大小区间,直接根据BlockSize定位到对应的槽位:O(1)。当BlockSize类别较多,指数分割内存大小区间:O(1)时间定为槽位,顺序遍历槽位内的内存块大小O(M)。M为每个Block链的平均长度。
- Buddy Systems:O(log N)
- IndexedFit:O(log N)和索引相关,以平衡二叉树为例。
TLSF Arena
要解决的问题
TLSF(Two-Level Sergregated Fit)Arena的内存碎片较小,且分配释放时间复杂度都是O(1)。复杂度都是O(1)意味着TLSF可以运用于实时系统,因为其内存分配和释放耗时是有边界的。
数据结构
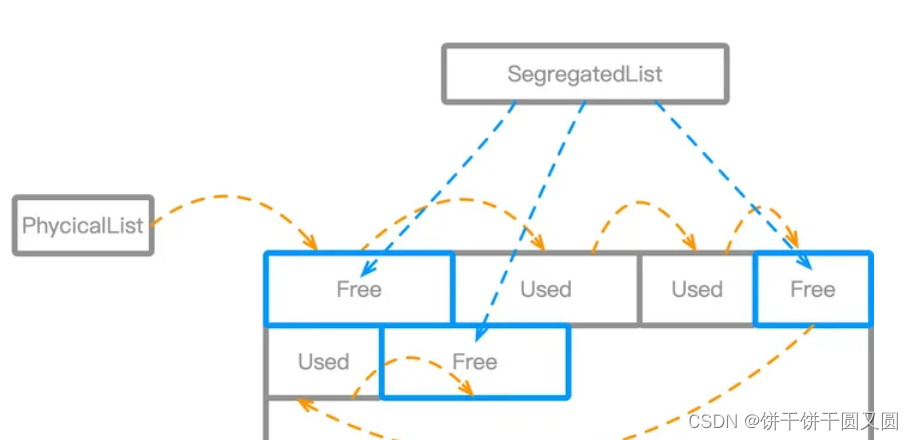
所有的内存块都被同时维护在两个链表中:
- Segregated list:主要用于分配指定大小的BlockSize,仅维护FreeBlock。
- Physical list:主要用于内存块的合并,维护所有Block,包括FreeBlock和分配出去的Block,所有的Block根据内存的物理地址顺次连接。
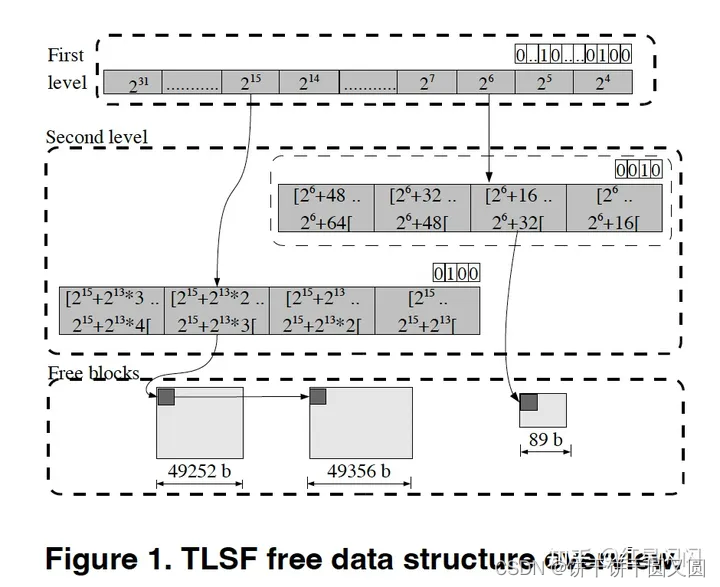
Segegated list分成两个level:
- First Level:是一个数组,存储指向SecondLevel的指针,数组槽位表示BlockSize的量级,从右往左分别是24、25、…。
- Second Level:是一个数组,数组槽位表示FirstLevel指定的内存大小的线性分割。槽位个数为divison,由Config配置的SLI(Second Level Index)决定。SLI为2,则Division为22=4,表示将内存现象分割为4份。槽位中存储指向对应大小的FreeBlock链表地址。
- FirstLevel和SecondLevel右上角表示对应的BitMap,表示对应槽位是否有FreeBlock
举例
- 需要分配一块85B的内存块,首先判断其内存大小属于哪一个量级,⌊log(85)⌋ = 6。
- 然后查询FirstLevel,找到26的槽位,26槽位表示[26~27)的内存块都在这个槽位里找。
- 通过26槽位进而找到对应的SecondLevel,SecondLevel将大小区间划分为4份,分为为[2^6 + 0, 2^6 + 16), [2^6 + 16, 2^6 + 32), [2^6 + 32, 2^6 + 48), [2^6 + 48, 2^6 + 64)。
- 85=26+21落在第二个区间,于是从SecondLevel第二个槽位进入,找到对应的FreeBlock。
- FreeBlock对应的大小为89Byte,多出4Byte,由于FreeBlock大小至少为24,所以直接分配89Byte的内存块,4Byte为内部碎片。
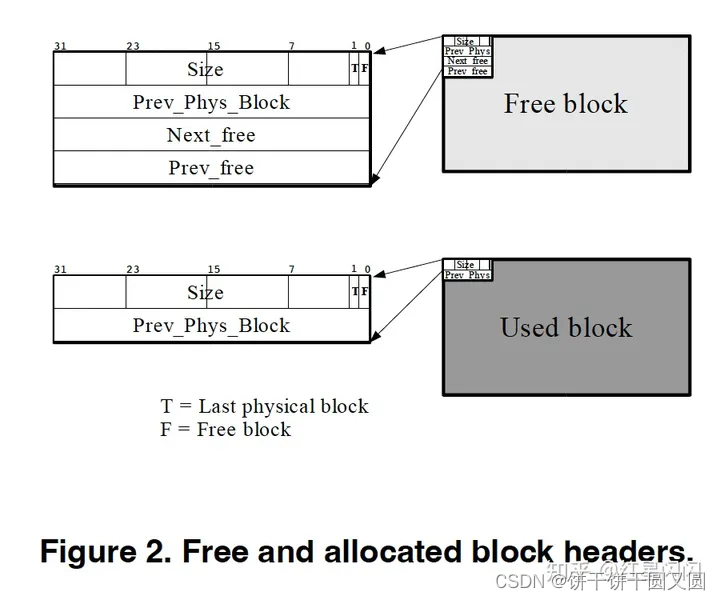
BlockHeader主要字段
- Size:块大小,无论是否使用都有的字段。
- Prev_Phys_Block:执向前一个物理块,对应前文所述的PhysicalList,无论是否使用都有的字段。
- Next_free和Pre_free:对应前文所述的SegragatedList,仅仅FreeBlock才有的字段。
定位函数
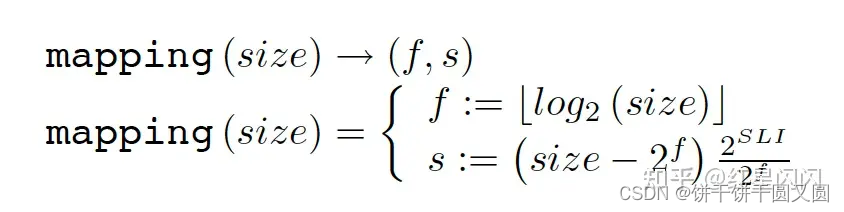
如函数mapping,给点一个内存块大小,可以快速定位对应的FreeBlock所在的FirstLevel偏移f,和Second Level偏移S。
- f:如前文所述,f决定的是内存大小的量级,可以直接通过log计算得到。
- s:s决定的是内存大小量级内线性分割的偏移,(size-2f)是超出对应两级最小值的大小。SecondLevel将[2f,2f+1)的内存区间等分成2^SLI份,所以该公式是对应大小所在的槽位。
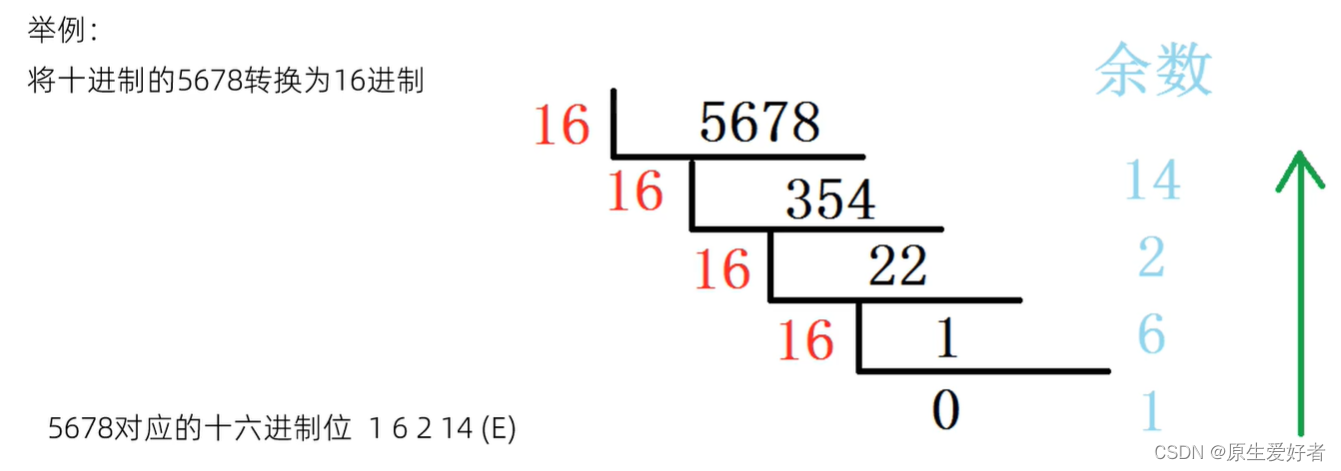
具体到代码实现,log计算就是对应值的二进制表示的最左边1所在位数,比如十进制数460,最左边的1在第8位,其大小量级就是28,就是FirstLevel的偏移f为8。后面紧跟SLI位数字表示SeconfLevel的偏移s,下图是1100,也就是12。
通过简单计算就可以定位到对应大小的FreeBlock,时间复杂度为O(1)。
总结
其实TLSF是对Segregated Free List的改进。Segregated Free List有两种:
- 如果线性分割,则O(1)的时间复杂度就可以找对应的FreeBlock,但是需要维护的槽位过多,设想线性分割的Segregated Free Lists,最大内存块为1G,碎片Fragment限定到16Byte内,则需要划分1G/16=2^26个槽位。
- 如果指数分割,可以大大减少槽位个数,同样是最大内存块为1G,碎片Fragment限定到16Byte内,只需要log(1G)=30个槽位,但是每一个槽位里内存大小值域变化较大,找到合适的FreeBlock需要顺序遍历,时间复杂度为O(M),M为每一个槽位里的平均FreeBlock个数。
所有,当内存大小较小,线性分割的Segregated Free Lists的效果更好(槽位个数在可接受范围内,时间复杂度为O(1)),当内存大小区间较大,指数分割的Segregated Free Lists的效果更好(主要为了槽位数在可控范围内。)
一个自然优化思路就是将线性分割和指数分割结合起来,这样既可以减少槽位个数,又可以快速定位槽位。
TLSF就是这样做,FirstLevel用于指数分割,尽可能减少了槽位数,Second用于线性分割,可以快速定位FreeBlock。





](https://img-blog.csdnimg.cn/ab2a850e96a44b7d83ae1ea24ed65386.png)