Games 103 作业二
作业二其实就是要使用隐式积分和PBD两种方式来实现布料求解。难度相对于作业一来说要简单一些,在文档中基本把步骤都写清楚了。主要逻辑首先参考Lecture 05 PPT的第18页:

然后我们按照文档的步骤一步一步地来。注意0号顶点和20号顶点是不参与更新的,它们相当于就是定死了位置。第一步是初始化,这个很简单:
for (int i = 0; i < V.Length; i++)
{
if (!Skip_Update(i))
{
V[i] *= damping;
}
}
for(int i = 0; i < X.Length; i++)
{
if (!Skip_Update(i))
{
X_hat[i] = X[i] + V[i] * t;
X[i] = X_hat[i];
}
}
第二步就是计算梯度。这里的梯度就是PPT里的
∇
F
(
x
(
k
)
)
=
1
Δ
t
2
M
(
x
(
k
)
−
x
[
0
]
−
Δ
t
2
v
[
0
]
)
−
f
(
x
(
k
)
)
\nabla F(\textbf{x}^{(k)}) = \dfrac{1}{\Delta t^2} \textbf{M} (\textbf{x}^{(k)} - \textbf{x}^{[0]} - \Delta t^2 \textbf{v}^{[0]}) - \textbf{f} (\textbf{x}^{(k)})
∇F(x(k))=Δt21M(x(k)−x[0]−Δt2v[0])−f(x(k))
这里的f就是重力和弹簧间的弹力。重力是个常量好办,弹力的计算需要遍历所有的边,找到边的两个顶点,分别进行计算,参考PPT的第11页:

void Get_Gradient(Vector3[] X, Vector3[] X_hat, float t, Vector3[] G)
{
//Momentum and Gravity.
for (int i = 0; i < G.Length; i++)
{
if (!Skip_Update(i))
{
G[i] = mass * (X[i] - X_hat[i]) / (t * t) - mass * gravity;
}
}
//Spring Force.
for (int e = 0; e < L.Length; e++)
{
int i = E[e * 2 + 0];
int j = E[e * 2 + 1];
float x = Vector3.Distance(X[i], X[j]);
Vector3 f = spring_k * (1 - L[e] / x) * (X[i] - X[j]);
if (!Skip_Update(i))
{
G[i] += f;
}
if (!Skip_Update(j))
{
G[j] -= f;
}
}
}
然后需要计算:
∂
2
F
(
x
(
k
)
)
∂
x
2
=
1
Δ
t
2
M
+
H
(
x
(
k
)
)
\dfrac{\partial^2F(\textbf{x}^{(k)})}{\partial\textbf{x}^2} = \dfrac{1}{\Delta t^2}\textbf{M} + \textbf{H}(\textbf{x}^{(k)})
∂x2∂2F(x(k))=Δt21M+H(x(k))
作业文档中给了近似求解的方法,我们就不用算
H
\textbf{H}
H了。我们使用Chebyshev加速牛顿法迭代,可以参考PPT中第26页:

作业中是固定的32次迭代次数,这里的break判断就可以省略掉;另外,x的更新直接使用作业里的公式即可:
for(int k=0; k<32; k++)
{
Get_Gradient(X, X_hat, t, G);
if(k == 0)
{
omega = 1.0f;
}
else if(k == 1)
{
omega = 2.0f / (2.0f - rho * rho);
}
else
{
omega = 4.0f / (4.0f - rho * rho * omega);
}
//Update X by gradient.
for(int i = 0; i < X.Length; i++)
{
if (!Skip_Update(i))
{
Vector3 old = X[i];
X[i] = omega * (X[i] - 1 / (mass / (t * t) + 4 * spring_k) * G[i]) + (1 - omega) * last_X[i];
last_X[i] = old;
}
}
}
迭代完别忘记更新下V,这里要使用+=,因为一开始算 x ~ \widetilde{x} x 的时候加过v了:
for(int i = 0; i < X.Length; i++)
{
if (!Skip_Update(i))
{
V[i] += (X[i] - X_hat[i]) / t;
}
}
最后的碰撞检测很简单,算一下点到球心的距离,如果小于半径就说明发生碰撞:
void Collision_Handling()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] X = mesh.vertices;
//Handle colllision.
Vector3 c = sphere.transform.position;
for(int i = 0; i < X.Length; i++)
{
if(!Skip_Update(i))
{
float d = Vector3.Distance(X[i], c);
if (d < r)
{
V[i] = V[i] + 1 / t * (c + r * (X[i] - c) / d - X[i]);
X[i] = c + r * (X[i] - c) / d;
}
}
}
mesh.vertices = X;
}
最后效果如下:

然后我们再看下PBD的实现。第一步就是让每个顶点自由更新:
for(int i=0; i<X.Length; i++)
{
if(i==0 || i==20) continue;
//Initial Setup
//...
V[i] *= damping;
V[i] += gravity * t;
X[i] += V[i] * t;
}
接下来,通过若干次迭代施加约束,这里可以参考Lecture 06 PPT的第10页:
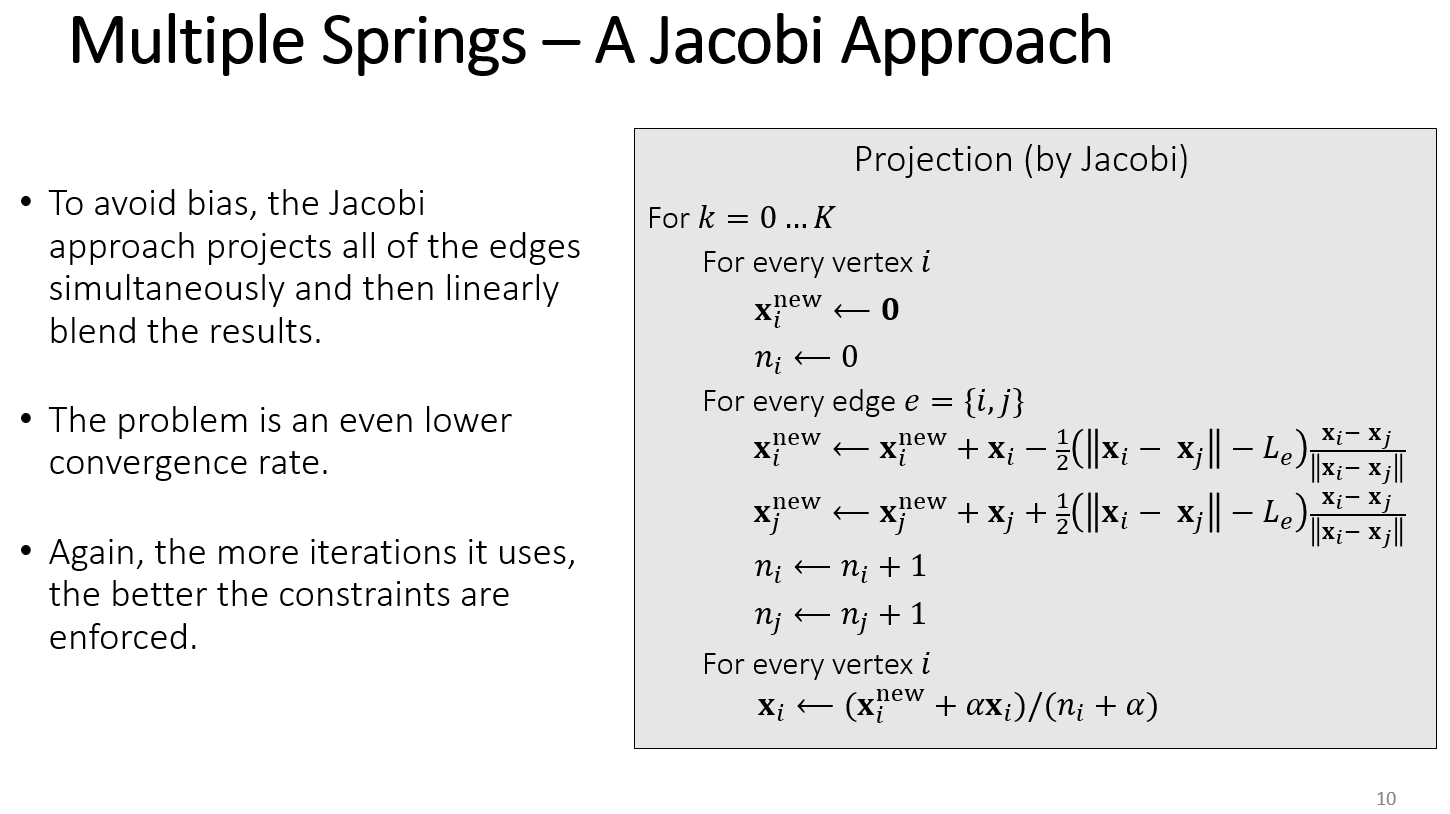
作业里 α \alpha α取的0.2:
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] vertices = mesh.vertices;
//Apply PBD here.
//...
Vector3[] sum_X = new Vector3[vertices.Length];
int[] sum_N = new int[vertices.Length];
for (int e = 0; e < L.Length; e++)
{
int i = E[e * 2 + 0];
int j = E[e * 2 + 1];
float x = Vector3.Distance(vertices[i], vertices[j]);
Vector3 f = L[e] * (vertices[i] - vertices[j]) / x;
sum_X[i] += 0.5f * (vertices[i] + vertices[j] + f);
sum_N[i]++;
sum_X[j] += 0.5f * (vertices[i] + vertices[j] - f);
sum_N[j]++;
}
for(int i = 0; i < V.Length; i++)
{
if(i == 0 || i == 20) continue;
Vector3 f = (0.2f * vertices[i] + sum_X[i]) / (0.2f + sum_N[i]);
V[i] += 1 / t * (f - vertices[i]);
vertices[i] = f;
}
mesh.vertices = vertices;
}
最后效果如下:
如果你觉得我的文章有帮助,欢迎关注我的微信公众号 我是真的想做游戏啊