收藏和点赞,您的关注是我创作的动力
文章目录
- 概要
- 一、方案设计
- 1.1 总体方案论证
- 1.2 项目总体设计
- 二、软件设计
- 3.1 主程序设计
- 三、软件设计
- 3.3 emWin图形界面实现
- 实物
- 附录2 源程序清单
- 四、 结论
- 五、 文章目录
概要
本次课题基于STM32F407微型控制器以及CAN总线通信技术,设计一款新型全液晶汽车仪表。相比于传统的机械式指针仪表,本设计的汽车仪表具有简单的接线方式,快速的模块之间通讯以及全液晶显示等特点。同时,该课题中采用emWin技术进行LCD液晶显示屏的设计,具有更直观美化的人机交互界面,而且由于采用了CAN总线通信方式,元器件与控制元件(ECU)之间信息传递性将会更好。本次课题,采用CAN分析仪开发测试工具,通过定义好相关模拟变量,模拟实际汽车中的情况输入CAN信号报文并利用Simulink建模进行汽车仪表灯的逻辑处理。同时将FreeRTOS实时操作系统移植到STM32F407上,利用STM32芯片输入输出信号,进而达到点亮汽车仪表的目的。
通过软件与硬件方面的调试,该课题达到了预期研究要求,证明了课题技术上的可行性以及延展性。
关键词:汽车仪表; CAN总线; STM32F407; Simulink建模; FreeRTOS
一、方案设计
1.1 总体方案论证
本课题对于实现汽车仪表系统提出如下两套设计方案。
方案一:
本设计采用通过串口与按键的方式来进行汽车仪表的实现。该方式通过使用串口调试工具,在PC端向STM32芯片发送指令,经过STM32的识别后,输出到显示模块上。按键控制则是通过改变STM32芯片I/O口的高低电平,实现某个特定的仪表指示功能的点亮与熄灭。该方案分为硬件模块以及软件设计两个模块。其中硬件模块包括:主控芯片、按键控制电路、蜂鸣器报警电路、指针电机电路以及LED显示电路。软件方面采用了Keil5编程软件向STM32芯片烧写代码程序。
其中电源电路包括STM32的最小系统以及下载电路;按键电路主要负责系统的启动/关闭,以及相关指示灯的点亮/熄灭;蜂鸣器电路是根据STM32的输出信号,当某些报警条件触发时,蜂鸣器就会工作;电机电路采用伺服电机进行模块的控制,主要负责车速表的指针转动,转速表的指针转动等;LED显示电路则是根据STM32的输出信号,点亮对应的指示灯或熄灭对应的指示灯。
该方案的弊端主要为,机械式的仪表指针过于传统化,人机交互界面不够美观且智能化。同时,由于现代汽车仪表包含多种功能,需要大量的仪表指示灯与驾驶员进行交互。在本方案中采用的LED显示灯所呈现的信息不够生动、具体,而且需要大量的LED去表达对应的仪表指示灯,容易造成资源的浪费,且给项目的布线和通讯带来很大的麻烦。另一方面,由于项目存在大量的仪表模块,单一的点对点导线通讯很难完成高效的通讯实现,会对项目的实现造成干扰。
方案二:
本设计采用STM32芯片与CAN总线结合的方式实现汽车仪表。通过CAN分析仪发送报文,STM32处理输入输出报文信号,根据相应的条件控制显示模块与蜂鸣器模块。为了更直观的显示,在本设计中也增加了按键的硬线控制模块,通过按键控制某些特定的仪表灯。本设计主要分为硬件设计与软件设计。硬件模块包括:电源电路,蜂鸣器电路,按键电路以及LCD显示电路。软件设计主要由Keil5与Matlab来实现。
在本设计中,在LCD显示模块上,会采用软件烧写的方式,实现一款全液晶的仪表显示屏以取代电机模块与LED模块。相比于机械指针的方式,全液晶显示屏具有更美观,更直观的人机交互界面,同时节省了大量的LED以及布线需求。在通信的传递上,采用新兴的CAN总线传递方式,相比于传动的导线通信,CAN总线具有更高效,更稳定且更安全的通信方式。同时,在本次设计中,将会移植FreeRTOS实时操作系统到STM32芯片上。该方法可以实现多进程任务,可以在更好的处理不同情况下的仪表条件。
因此,采用方案二的汽车仪表系统更符合我们的实际需求,更贴切现代发展,该方案操作性高,维护性好,具有良好的安全性与实用性。因此,本设计采用方案二。
1.2 项目总体设计
本项目基于STM32F407设计的汽车仪表系统由:主控芯片,CAN通讯模块,按键模块,LCD显示模块和报警模块组成。STM32主控制芯片负责在接收到CAN通信传来的信号或者按键按下时的系统任务调度,经过主控芯片处理后,会输送到LCD显示模块和报警模块,执行点亮或熄灭相关指示灯,蜂鸣器警报,同步水温表,车速表等操作。系统功能框图如图1.1所示。
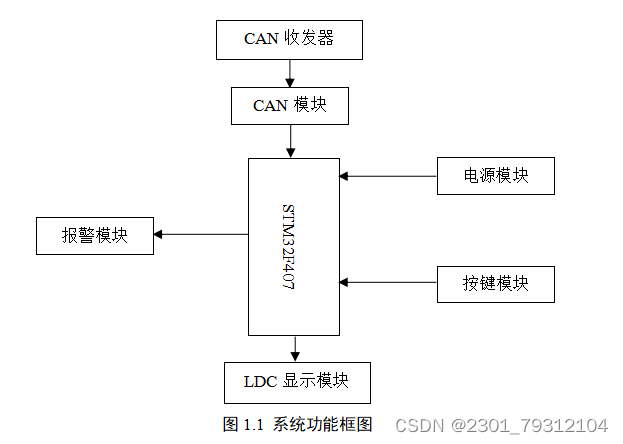
图1.1 系统功能框图
该项目分为两种控制方式:CAN总线通信以及按键硬线通信。通过使用CAN收发器实时发送CAN报文给STM32芯片,STM32芯片会判断是否满足相关条件,执行点亮/闪烁/熄灭相关仪表灯或报警。由于在STM32中移植FreeRTOS实时操作系统,会在一个循环周期内不停检测是否接收到CAN报文,执行多个任务调度,实现多个仪表灯的控制。按键控制则是通过定义好的I/O口与仪表灯,当按键按下或取消时,仪表灯和报警会有对应的显示。至此为该项目的流程与功能。
二、软件设计
3.1 主程序设计
本课题设计的主程序流程如图3.1所示,开机后会初始化液晶显示屏,内部时钟以及I/O口。在FreeRTOS里建立两个任务,分别为主程序任务以及显示任务(主程序任务优先级大于显示任务)。主程序任务会根据内部时钟,不停地循环。当STM32收到信息或按键按下,会判断是否有效。如若无效,不执行任何操作,继续循环。如若有效,会切换到显示任务中,根据逻辑,输出对应的信号,更新LCD液晶显示屏上的信息或蜂鸣器鸣响。
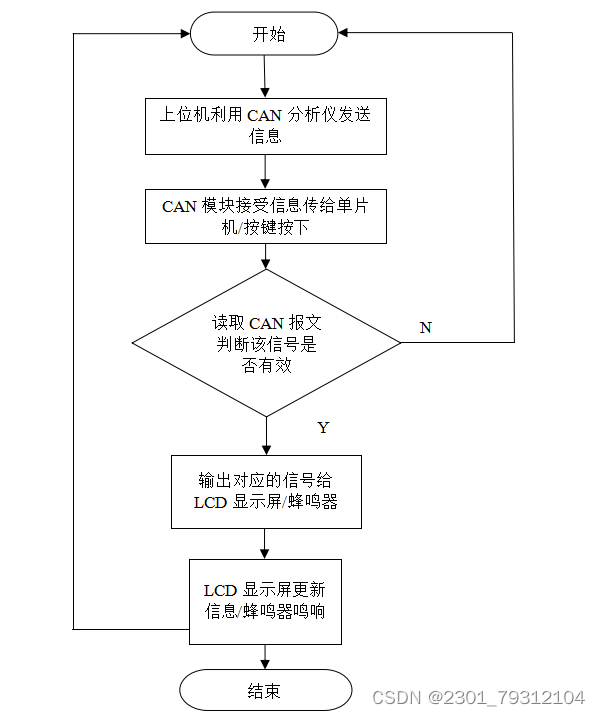
图3.1 程序主流程图
三、软件设计
3.3 emWin图形界面实现
为了完善本设计对仪表仪器人机交互界面操作的人性化、智能化的需求,本设计引用了emWin在stm32嵌入式设计,使用了GUIBuilder作为一种LCD界面图形可视化程序的设计方法,最终驱动硬件电路完成LCD显示[15]。在TaskDisplay中,利用Bmpcvt.exe软件可将png格式的图片转化为16进制的C代码格式。在APP模块中,调用GUIBuilder的API函数“GUI_DrawBitmap”,即可实现图片的显示。项目部分源码如图3.5所示:
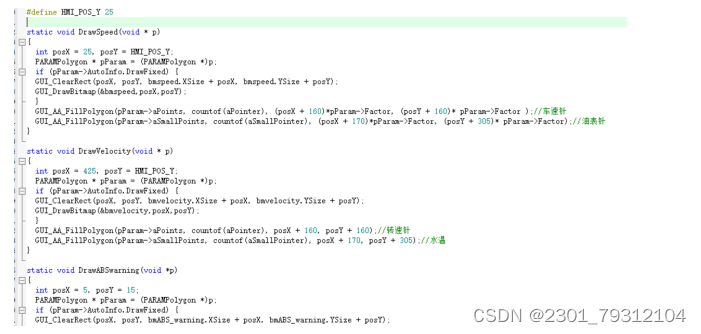
图3.5 emWin实现
emWin可以在操作系统下的多任务中工作。它具有模块化的特点,采用分层结构。emWin总共包括4层,每层可以单独使用。包括第一层:LCD驱动器;第二层:图形库;第三层:插件库;第四层:窗口管理器[16]。emWin是以C语言的形式实现,通过对第一层的修改,就可应用到项目中。emWin模块流程图如3.6所示:
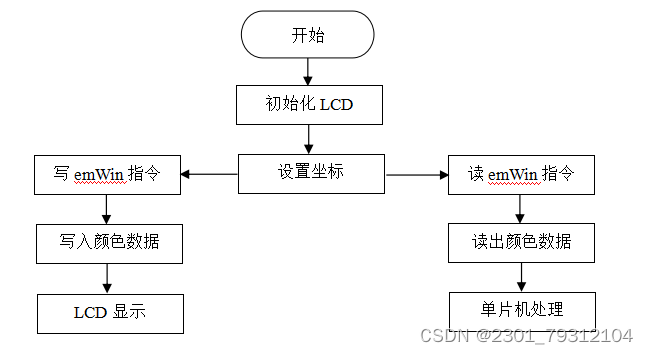
图3.6 emWin流程图
在汽车仪表的图形化界面设计中,最为重要的就是仪表指针转动的设计。仪表指针需要根据STM32收到的CAN报文,来在图形界面中有相应的显示。为了使指针的精度精准,需要用量角器测出仪表盘的数据刻度,在代码中进行算法优化。以车速表为例,如图3.7所示:

图3.7 车速表概念图
如上图所示,将该仪表盘看做一个在坐标轴上的圆形,从X轴起始到0刻度大约为225度,到170刻度大约为45度。因此该车速表可以看做一个半径为1的270度圆,既1.25×3.14+0.25×3.14。当CAN报文传输进20KM/h的值时,只需让指针指向约195度的位置,既1.16×3.14,就可以实现仪表指针的精准转动。具体代码如图3.8所示:
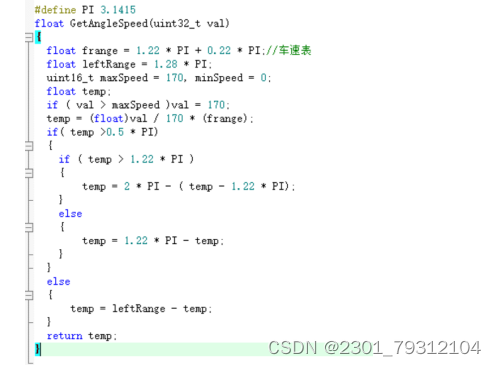
图3.8 指针算法
具体的数据会在调试中,根据实际情况的变化而改变以到达最小误差的效果。
实物

附录2 源程序清单
#include "GUI.h"
#include "JPGResource.h"
#include "displayapp.h"
#include "sys.h"
#include "delay.h"
#include "key.h"
#include "Beep.h"
uint16_t gEngCoolantValue = 0;
uint16_t gFuelResistanceValue = 0;
uint16_t gESCVehSpeed = 0; //0-170km/h
uint32_t gEMSEngSpd = 0; //0-8000
uint32_t gODOMeter = 0;
uint8_t gturnleft = 0;
uint8_t gturnright = 0;
uint32_t flag = 0;
uint8_t gAir = 0;
uint8_t gseatbelt = 0;
uint8_t gseatbelt1 = 0;
uint8_t gABSwarning = 0;
uint8_t gPark = 0;
uint8_t gposition = 0;
static const GUI_POINT aPointer[] = {
{ 0, 10 },
{ 150, 0 },
{ 0, -10 },
{ -20, 0 },
};
static const GUI_POINT aSmallPointer[] = {
{ 0, 5 },
{ 40, 0 },
{ 0, -5 },
{ -10, 0 },
};
static GUI_POINT aPointerHiRes[countof(aPointer)];
static GUI_POINT aSmallPointerHiRes[countof(aSmallPointer)];
typedef struct {
GUI_AUTODEV_INFO AutoInfo;
GUI_POINT aPoints[countof(aPointer)];
GUI_POINT aSmallPoints[countof(aSmallPointer)];
int Factor;
}PARAMPolygon;
#define HMI_POS_Y 25
static void DrawSpeed(void * p)
{
int posX = 25, posY = HMI_POS_Y;
PARAMPolygon * pParam = (PARAMPolygon *)p;
if (pParam->AutoInfo.DrawFixed) {
GUI_ClearRect(posX, posY, bmspeed.XSize + posX, bmspeed.YSize + posY);
GUI_DrawBitmap(&bmspeed,posX,posY);
}
GUI_AA_FillPolygon(pParam->aPoints, countof(aPointer), (posX + 160)*pParam->Factor, (posY + 160)* pParam->Factor );//车速针
GUI_AA_FillPolygon(pParam->aSmallPoints, countof(aSmallPointer), (posX + 170)*pParam->Factor, (posY + 305)* pParam->Factor);//油表针
}
static void DrawVelocity(void * p)
{
int posX = 425, posY = HMI_POS_Y;
PARAMPolygon * pParam = (PARAMPolygon *)p;
if (pParam->AutoInfo.DrawFixed) {
GUI_ClearRect(posX, posY, bmvelocity.XSize + posX, bmvelocity.YSize + posY);
GUI_DrawBitmap(&bmvelocity,posX,posY);
}
GUI_AA_FillPolygon(pParam->aPoints, countof(aPointer), posX + 160, posY + 160);//转速针
GUI_AA_FillPolygon(pParam->aSmallPoints, countof(aSmallPointer), posX + 170, posY + 305);//水温
}
void keyBeam()
{
u8 key;
key=KEY_Scan(0);
if(key)
{
if(key == WKUP_PRES)
{
GUI_DrawBitmap(&bmHigh_Beam,610,380);
}
else
{
GUI_ClearRect(610, 380, bmHigh_Beam.XSize + 610, bmHigh_Beam.YSize + 380);
}
if(key == KEY0_PRES)
{
GUI_DrawBitmap(&bmlow_beam,530,380);
}
else
{
GUI_ClearRect(530, 380, bmlow_beam.XSize + 530, bmlow_beam.YSize + 380);
}
}else delay_ms(10);
}
void show()
{
if( gturnleft == 1)
{
if( flag == 1)
{
GUI_DrawBitmap(&bmTurn_left,255,380);
BEEP = 1;
delay_ms(100);
BEEP = 0;
}
else
{
GUI_ClearRect(255, 380, bmTurn_left.XSize + 255, bmTurn_left.YSize + 380);
}
}
if( gturnright == 1)
{
if( flag == 1)
{
GUI_DrawBitmap(&bmTurn_right,445,380);
BEEP = 1;
delay_ms(100);
BEEP = 0;
}
else
{
GUI_ClearRect(445, 380, bmTurn_right.XSize + 445, bmTurn_right.YSize + 380);
}
}
if( gABSwarning == 1)
{
GUI_DrawBitmap(&bmABS_warning,310,5);
}
else
{
GUI_ClearRect(310, 5, bmABS_warning.XSize + 310, bmABS_warning.YSize + 5);
}
if( gPark == 1)
{
static int t = 0;
GUI_DrawBitmap(&bmParkingIndication_green,400,10);
if( t == 0)
{
BEEP = 1;
delay_ms(100);
BEEP = 0;
delay_ms(100);
BEEP = 1;
delay_ms(100);
BEEP = 0;
t = 1;
}
}
else
{
GUI_ClearRect(400, 10, bmParkingIndication_green.XSize + 400, bmParkingIndication_green.YSize + 10);
}
if( gposition == 1)
{
GUI_DrawBitmap(&bmPosition_lamp,690,380);
}
else
{
GUI_ClearRect(690, 380, bmPosition_lamp.XSize + 690, bmPosition_lamp.YSize + 380);
}
if( gAir == 1)
{
GUI_DrawBitmap(&bmAirbag_warning,35,380);
}
else
{
GUI_ClearRect(35, 380, bmAirbag_warning.XSize + 35, bmAirbag_warning.YSize + 380);
}
if( gseatbelt == 1)
{
GUI_DrawBitmap(&bmseatblet,105,380);//显示
BEEP = 1;
delay_ms(50);
BEEP = 0;
delay_ms(50);
BEEP = 1;
delay_ms(50);
BEEP = 0;
delay_ms(1000);
}
else
{
GUI_ClearRect(105, 380, bmseatblet.XSize + 105, bmseatblet.YSize + 380);//清除
}
if( gseatbelt1 == 1)
{
GUI_DrawBitmap(&bmseatblet_1,185,380);//显示
BEEP = 1;
delay_ms(50);
BEEP = 0;
delay_ms(50);
BEEP = 1;
delay_ms(50);
BEEP = 0;
delay_ms(1000);
}
else
{
GUI_ClearRect(185, 380, bmseatblet_1.XSize + 185, bmseatblet_1.YSize + 380);//清除
}
}
#define PI 3.1415
float GetAngleSpeed(uint32_t val)
{
float frange = 1.22 * PI + 0.22 * PI;//车速表
float leftRange = 1.28 * PI;
uint16_t maxSpeed = 170, minSpeed = 0;
float temp;
if ( val > maxSpeed )val = 170;
temp = (float)val / 170 * (frange);
if( temp >0.5 * PI)
{
if ( temp > 1.22 * PI )
{
temp = 2 * PI - ( temp - 1.22 * PI);
}
else
{
temp = 1.22 * PI - temp;
}
}
else
{
temp = leftRange - temp;
}
return temp;
}
float GetAngleEngSpeed(uint32_t val)
{
float frange = 1.22 * PI + 0.19 * PI;
float leftRange = 1.21 * PI;
uint16_t maxSpeed = 8000, minSpeed = 0;
float temp;
if ( val > maxSpeed )val = 8000;
temp = (float)val / (maxSpeed - minSpeed) * (frange);
if ( temp > 1.21 * PI )
{
temp = 2 * PI - (temp - 1.21 * PI);
}
else
{
temp = leftRange - temp;
}
return temp;
}
float GetAngleTempature(uint32_t val)
{
float frange = 1.25 * PI - 0.3 * PI;
float leftRange = 1.25 * PI;
uint16_t maxTempature = 120, minTempature = 0x00;
float temp;
if ( val > maxTempature )val = 120;
temp = (float)val / (maxTempature - minTempature) * (frange);
temp = leftRange - temp;
return temp;
}
float GetAngleFuel(uint32_t val)
{
float frange = 0.93 * PI - 0.07 * PI;
float leftRange = 0.93 * PI;
uint16_t maxFuel = 0x0029, minFuel = 0x00;
float temp;
if ( val > maxFuel )val = 0x0029;
temp = (float)val / (maxFuel - minFuel) * (frange);
temp = leftRange - temp;
return temp;
}
void HMIDisplay(void)
{
GUI_AUTODEV aAuto[10];
PARAMPolygon Param;
int i;
Param.Factor = 3;
for (i = 0; i < countof(aAuto); i++)
{
GUI_MEMDEV_CreateAuto(&aAuto[i]);
}
for (i = 0; i < countof(aPointer); i++)
{
aPointerHiRes[i].x = aPointer[i].x * Param.Factor;
aPointerHiRes[i].y = aPointer[i].y * Param.Factor;
}
for (i = 0; i < countof(aSmallPointer); i++)
{
aSmallPointerHiRes[i].x = aSmallPointer[i].x * Param.Factor;
aSmallPointerHiRes[i].y = aSmallPointer[i].y * Param.Factor;
}
GUI_AA_SetFactor(Param.Factor);
while(1)
{
keyBeam();
show();
for (i = 0; i < 10; i++)
{
GUI_AA_EnableHiRes();
GUI_RotatePolygon(Param.aPoints, aPointerHiRes, countof(aPointer), GetAngleSpeed(gESCVehSpeed));//速度
GUI_RotatePolygon(Param.aSmallPoints, aSmallPointerHiRes, countof(aSmallPointer), GetAngleFuel(gFuelResistanceValue));//油耗
GUI_MEMDEV_DrawAuto(&aAuto[0], &Param.AutoInfo, DrawSpeed, &Param);
GUI_AA_DisableHiRes();
GUI_RotatePolygon(Param.aPoints, aPointer, countof(aPointer), GetAngleEngSpeed(gEMSEngSpd));//转速
GUI_RotatePolygon(Param.aSmallPoints, aSmallPointer, countof(aSmallPointer), GetAngleTempature(gEngCoolantValue));//水温
GUI_MEMDEV_DrawAuto(&aAuto[1], &Param.AutoInfo, DrawVelocity, &Param);
GUI_SetFont(GUI_FONT_D24X32);
GUI_SetTextAlign(GUI_TA_RIGHT);
GUI_GotoXY(425,405);
GUI_DispDecMin(gODOMeter);
GUI_Delay(20);
}
}
}
四、 结论
警灯”,“当前车速80KM/S”等,经过CAN收发器的接收传递给STM32F407,STM32F407经过逻辑运算,判断该信息是否符合显示模块的条件,进而驱动LCD显示屏以及蜂鸣器模块。LCD显示屏就会根据emWin指令,在屏幕指定位置呈现图形,包括不同颜色,是否闪烁等情况。当再次收到STM32指令时,也会进一步决定是否取消报警或更换报警等情况。既此时为一个周期的流程,该流程在整个汽车仪表系统中为10ms一次,从上电开始。
采用CAN总线通信的汽车仪表系统,通信效果得到很大的增强,抗干扰能力也有显著的提高。而LCD液晶显示屏的改进,也使得人机交互界面更加的美观,令人舒适。由于该项目仅为模拟通信实验,具体实验数据还有待考证,包括MCU的处理效率,多MCU间的CAN通信,液晶显示屏的动画效果等。但由此可见基于CAN总线通信的液晶汽车仪表,在未来具有很大的期望空间。
五、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 方案设计 3
1.1 总体方案论证 3
1.2 项目总体设计 4
2 项目硬件设计 6
2.1 单片机 6
2.1.1 ARM Cortex-M4内核 6
2.1.2 STM32F407ZGT6芯片 6
2.2最小系统模块 8
2.3 LCD显示电路 9
2.4 CAN通信电路 11
2.5蜂鸣器以及按键电路 12
3 软件设计 14
3.1 主程序流程 14
3.2 FreeRTOS移植 15
3.3 emWin图形界面实现 16
3.4 Simulink建模处理 19
4 项目调试 21
4.1 软件调试 21
4.1 重点问题及解决 22
结 论 24
参考文献 25
附录:程序主函数 27
致 谢 36