文章目录
- 前言
- 前向星
- 定义
- 存储结构
- 优缺点
- 链式前向星
- 边的定义
- 边的插入
- 边的查找
- 运行示例
- 总结
前言
我们对于图的存储方式常用的有邻接矩阵(适用于稠密图),对于边的查询效率较低,也有邻接表,对于边的查询效率高,但是会有扩容消耗,用数组实现也不好控制内存。而我们有一种中庸的数据结构叫做前向星,用类似邻接表的结构对其加以改造,就得到了一种效率得到极大提升的链式前向星。
前向星
定义
把图中所有的边存储在连续的数组中,按照边的起点进行排序,我们称这种对边的存储方式为前向星
前向星其实就是按照边的起点进行排序的边集数组
存储结构
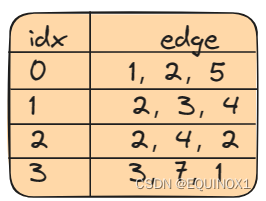
以该图为例
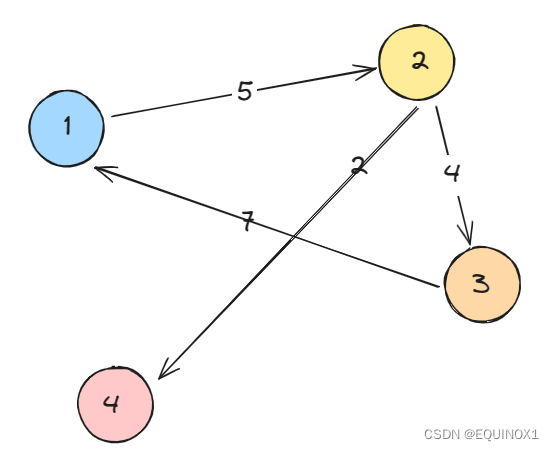
如下就是该图边集的前向星表示形式,idx为数组下标,边存储了边的起点u,中点v和权值w
优缺点
实现简单,但是将所有边插入的基础上进行了一次排序,带来了时间开销,实用性较差,一旦有新边插入就要再次排序,只适用于离线算法。
链式前向星
链式前向星是一种用于存储和处理稀疏图的数据结构,并且在实际应用中通常比邻接矩阵更加高效。其思想就是用静态链表来实现邻接表。
邻接表的每个位置都是一个链表,代表下表i发出的所有边,但是vector带来扩容开销,数组实现又要内存控制,也有一定开销,我们就想到了初学时看似鸡肋的静态链表,即以下一条边的下标索引代替下一条边的指针,同时维护head数组,head[ i ]代表i发出边的链表的头节点下标,这样我们可以实现像邻接表插入那样的伪头插。
具体实现我们需要edges数组存储边,head数组存储i发出的边链头节点在edges中下标,edgecount当前的边的数目,maxn最大边的存储数目
边的定义
typedef int W;
struct Edge
{
int _u;
int _v;
W _w;
int _next;
} edges[maxn];
边的插入
void addEdge(int u, int v, W w)
{
edges[edgecount]._u = u;
edges[edgecount]._v = v;
edges[edgecount]._w = w;
edges[edgecount]._next = head[u];//head初始所有值为-1
head[u] = edgecount++;//edgecount初始为1
}
这其实就是一个静态链表的头插,显然整个插入过程时间复杂度为O(1)
边的查找
我们只要从head中拿到结点vertex边链的头节点下标,然后不断访问_next,直到-1为止
(我们初始化head所有值为-1,~i为结束条件即-1补码取反是0)
for (int i = head[vertex]; ~i; i = edges[i]._next)
{
//...
}
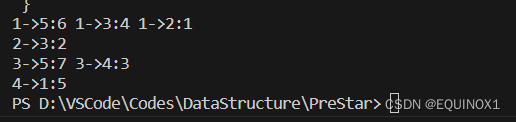
运行示例
memset(head, -1, sizeof(head));
int vertex = 0;
addEdge(1, 2, 1);
addEdge(2, 3, 2);
addEdge(3, 4, 3);
addEdge(1, 3, 4);
addEdge(4, 1, 5);
addEdge(1, 5, 6);
addEdge(3, 5, 7);
for (int vertex = 1; vertex <= 4; vertex++)
{
for (int i = head[vertex]; ~i; i = edges[i]._next)
{
cout << vertex << "->" << edges[i]._v << ":" << edges[i]._w << " ";
}
cout << endl;
}
总结
在工程中邻接表显然比链式前向星更为实用,但是对于OJ题目而言,链式前向星省去了vector的扩容开销同时提高了一些效率,还是很有用的。




![特殊类设计[下] --- 单例模式](https://img-blog.csdnimg.cn/7ea0f92bd8614ebb94d7be12a75a6667.png)