UWB定位的最基础技术是TOF测距、TDOA到达时间差、AOA到达角度测量:
定位算法:TOF、TDOA、AOA/PDOA
UWB定位算法
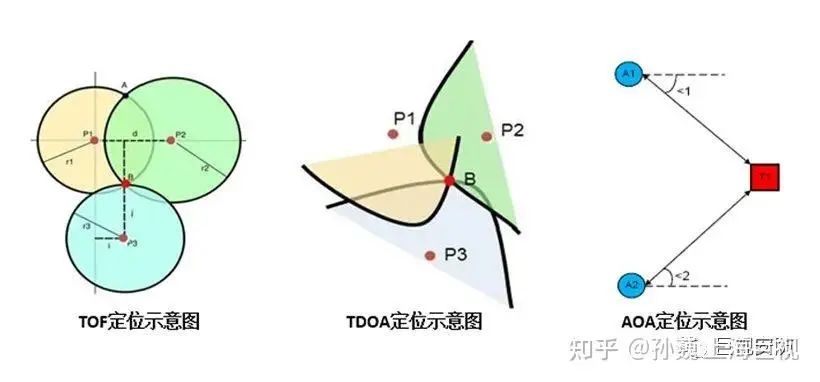
(1) TOF(Time of Flight飞行时间):
以基站为圆心,以标签和基站距离为半径画圆,相交区域即为标签位置。标签和基站间的距离是通过多次收发脉冲测量。
-
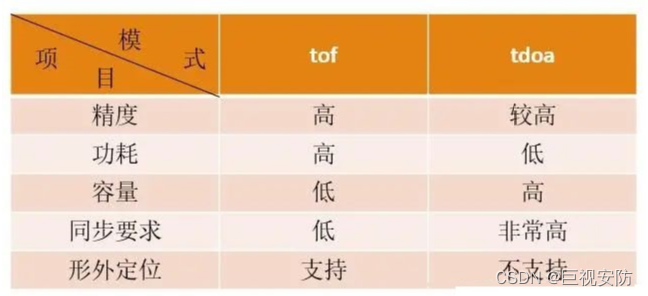
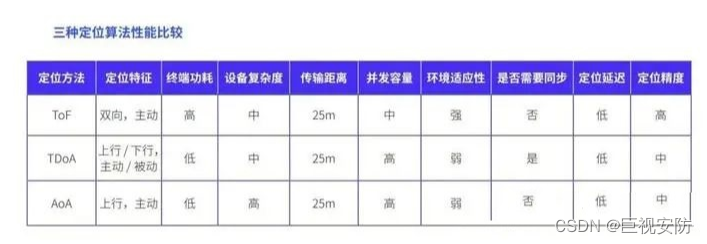
优点:算法简单、精度较高
-
缺点:标签费电、系统容量小
(2) TDOA(Time Difference of Arrival):
基站彼此需高精度时间同步,标签定时广播,根据标签广播信号到达不同基站的时间差值画出双曲线,相交区域即为标签位置。
-
优点:标签省电、系统容量大
-
缺点:基站需高精度时间同步、包络线外精度低
(3) AOA/PDOA(Angle of Arrival):
标签的广播信号到达不同基站角度连线的交点,就是标签的位置。
-
优点:需要基站数量少
-
缺点:准确测量角度困难,信号遮挡敏感
实际部署
-
最常见的是基于TOF测距和TDOA到达时间差可以实现基于最小二乘法的三角定位实现三维定位;真实的应用环境由于定位基站的安装不可能保证基站之间的高度差,实际也只能实现二维定位;
-
三角定位有很多应用限制条件,除非环境条件很好,否则采用三角定位实现二维定位是个灾难;
-
高度定位目前唯一可行的技术手段就是基于标签和基站的气压差,演算标签的高度值,相对稳定的气流环境,精度可以在50厘米左右;
-
TOA定位对传播中产生的误差比较敏感,这些误差来自于传播中的反射、多径传播、非视距传播和噪声等干扰,会造成各圆无法相交或相交处不是一个点而是一个区域。同时TOA定位要求移动终端和基站之间在时间上要准确同步,1ns的同步误差将会给定位带来大约0.3米的不确定性。
-
TDOA定位不必要进行基站和移动终端之间的同步,而只需要基站之间进行同步。因为基站的位置是固定的,基站之间进行同步与基站和移动终端之间进行同步要容易实现得多。
-
AOA的优点是所需要的基站比较少,最少只要两个基站就可以进行定位。AOA的缺点是当移动终端和基站的距离比较远的时候,即使有微小的定位角度的误差,都会造成比较大的定位距离的偏差。因此AOA定位多见于中、短距离的定位。
TOF
飞行时间法(Time of flight,TOF)是一种双向测距技术,它通过测量UWB信号在基站与标签之间往返的飞行时间来计算距离。
基于TOF的定位方法测距不依赖基站与标签的时间同步,故没有时钟同步偏差带来的误差,但TOF测距方法的时间取决于时钟精度,时钟偏移会带来误差。为了减少时钟偏移量造成的测距误差,通常采用正反两个方向的测量方法,即远端基站发送测距信息,标签接收测距信息并回复,然后再由标签发起测距信息,远端基站回复,通过求取飞行时间平均值,减少两者之间的时间偏移,从而提高测距精度。
TOF类,在这个大类里,有人采用传统单边或者双边测量,也有人采用群发群收的共用模式提高容量。当然这是模式和发包速率有关;这种传统模式对于电池电量是一个苛刻的考验。
优点
-
算法简单,可靠,相比TDOA而言,鲁棒性强,抗环境干扰能力强
-
通过TWR,可以基本可以抵消时钟精度的误差,无需时钟同步。精度较高
-
算法可以前置在各定位区域主基站,不同场景定义不同定位算法。使用灵活
-
可以实现全无线方式,即无线定位和无线通讯
-
采用定位算法前置,避免了集中定位引擎,系统可靠性高
缺点
-
相比TDOA,标签费电,大致在5倍以上。需要类似集成加速度传感器、BLE等技术实现非定位状态下的低功耗。
-
系统容量小,TOF是采用分区定位策略,典型单个定位区域<200个标签,多数可以满足应用要求。TDOA如果采用分区无线同步,有类似同样的限制。
-
采用TDM的通讯方式,带宽有效利用率低,相比TDOA,定位延时大,对于实时要求高的定位需求,不建议采用。
-
严格的划区部署,部署复杂度相比TDOA要高
TDOA
到达时间差(Time Differenceof Arrival,TDOA)是一种利用到达时间差进行定位的方法又称为双曲线定位。TDOA算法并不是直接利用信号到达时间,而是利用多个基站接收到信号的时间差来确定移动目标的位置。因此与TOA相比并不需要加入专门的时间戳来进行时钟同步,定位精度相对有所提高。
TDOA 是基于到达时间差定位,系统中需要有精确时间同步功能。
时间同步有两种,一种是通过有线做时间同步,有线时间同步可以控制在 0.1ns 以内,同步精度非常高,由于采用有线, 所有设备要么采用中心网络的方式,要么采用级联的方式,但增加了网络维护的复杂度,也增加了施工的复杂度,成本升高。并且, 系统中还有一个专用的有线时间同步器,综合价格比较昂贵。
另一种是通过无线做时间同步,采用无线同步一般可以达到 0.25ns,精度稍逊于有线时间同步,但其系统相对来说更为简单。
TDOA类:利用标签广播、基站同步接收的方式,高速、省电、容量大,成本也低。这种算法虽然好处多,但是总体精度低于tof(这是因为算法在扰动环境中收敛有问题)。因此大概的精度0.3m,扰动情况下、边界情况下,精度0.3-0.8甚至1.5m。
优点
-
标签和基站交互少,标签省电,待机时间长
-
系统容量大,如果采用时钟同步器的有线同步方式,理论上标签的数量可以超过6000个
-
增加基站,补定位盲点容易,系统扩展容易
缺点:
-
需要基站之间做高精度时间同步、跨组定位算法复杂,采用有线同步需要时钟同步器,实施复杂。采用无线时钟同步,只能分区同步,带来跨区以及标签数量限制等问题。
-
因为同步误差不可能消除,整体定位精度低于TOF,此外基站包络线外精度低。
-
不支持定位算法前置基站,定位基站需要采用有线的方式连接到定位引擎服务器,不能采用无线通讯方式。
-
算法相比TDOA复杂,抗干扰和鲁棒性相比TOF要差一些
由于TDoA 是基于到达时间差,将到达时间差转换为距离差之后,一般采用双曲线算法,而双曲线算法的局限性决定了在基站围成的区域内定位精度高,在区域外定位精度比较差。而类似电厂等环境复杂的场景,系统面临建设的巨大难度,用TDoA 定位就很难满足应用的需求。这种模式下,可以采用ToF 定位
比较一下ToF 和TDoA两种模式下的功耗,ToF 模式下,标签需要逐一和基站测距,需要多次测距,一般一轮测距下来,需要5ms 以上。TDoA 定位,标签只需要发送一个报文即可完成定位,一般从准备到发送完成也在0.5ms 内完成,其功耗显著低于ToF模式。