前言:
最近在学习自动驾驶方向的东西,简单整理一些学习笔记,学习过程中发现宝藏up 手写AI
- 3D卷积
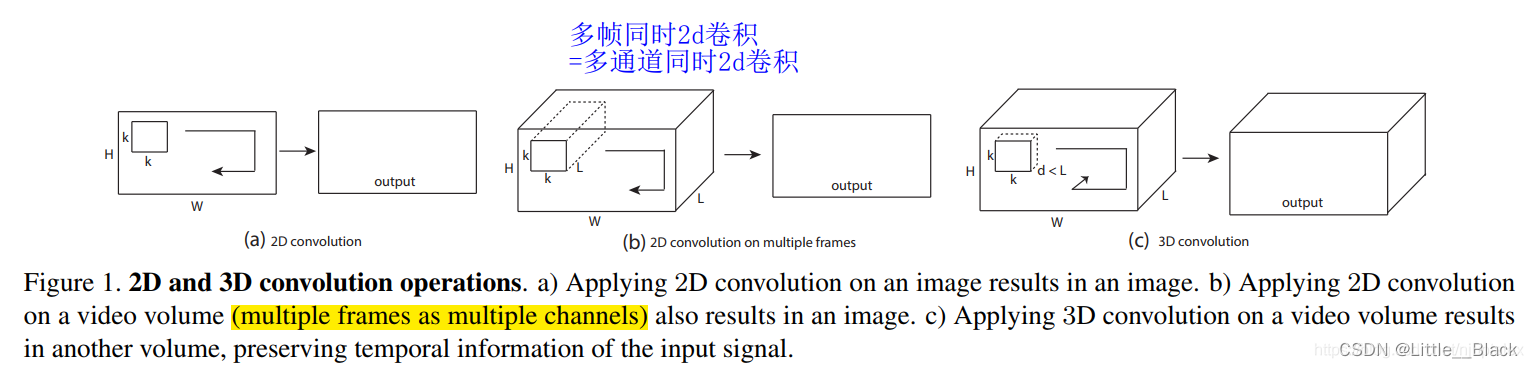
3D卷积的作用:对于2DCNN,我们知道可以很好的处理单张图片中的信息,但是其对于视频这种由多帧图像组成的图片流,以及CT****等一些医学上的3维图像就会显得束手无策。因为2D卷积没有考虑到图像之间时间维度上的物体运动信息的变化(3维CT图像也可以近似看为是二维图像在时间上的变化)。因此,为了能够对视频(包括3维医学图像)信息进行特征提取,以便用来分类及分割任务,提出了3D卷积,在卷积核中加入时间维度。
- pytorch中对应函数介绍
class torch.nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
说明:
参数kernel_size,stride,padding,dilation可以是一个int的数据 - 卷积height和width值相同,也可以是一个有三个int数据的tuple数组,tuple的第一维度表示depth的数值,tuple的第二维度表示height的数值,tuple的第三维度表示width的数值
Parameters:
in_channels(int) – 输入的通道数
out_channels(int) – 输出的通道数
kernel_size(int or tuple) - 卷积核的尺寸
stride(int or tuple, optional) - 卷积步长
padding(int or tuple, optional) - 边缘填充的像素个数
dilation(int or tuple, optional) – 卷积核元素之间的间距
groups(int, optional) – 卷积的组数
bias(bool, optional) - 如果bias=True,添加偏置
举个栗子:
# With square kernels and equal stride
m = nn.Conv3d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
m = nn.Conv3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(4, 2, 0))
input = autograd.Variable(torch.randn(20, 16, 10, 50, 100))
output = m(input)
- 3D卷积图示:
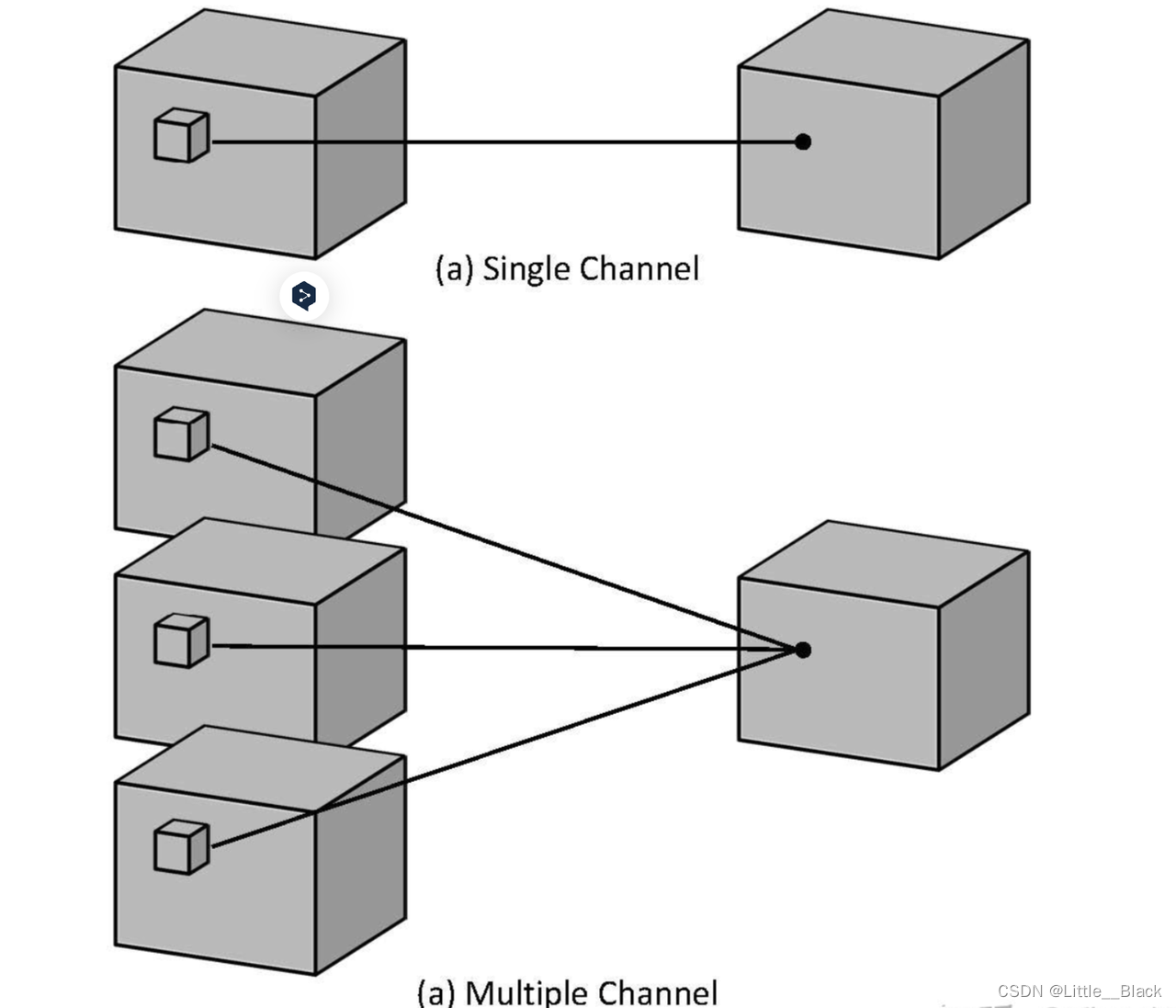
针对单通道,与2D卷积不同之处在于,输入图像多了一个 depth 维度,故输入大小为(1, depth, height, width),卷积核也多了一个k_d维度,因此卷积核在输入3D图像的空间维度(height和width维)和depth维度上均进行滑窗操作,每次滑窗与 (k_d, k_h, k_w) 窗口内的values进行相关操作,得到输出3D图像中的一个value.
针对多通道,输入大小为(3, depth, height, width),则与2D卷积的操作一样,每次滑窗与3个channels上的 (k_d, k_h, k_w) 窗口内的所有values进行相关操作,得到输出3D图像中的一个value。
2.1 原理简介
使用两个或多个从不同角度拍摄的2D图像来估计每个像素的深度,从而重建3D场景。.一般而言,立体视觉系统需要有两个(或者两个以上)摄像头的支持,也就正如人类的双眼一样。
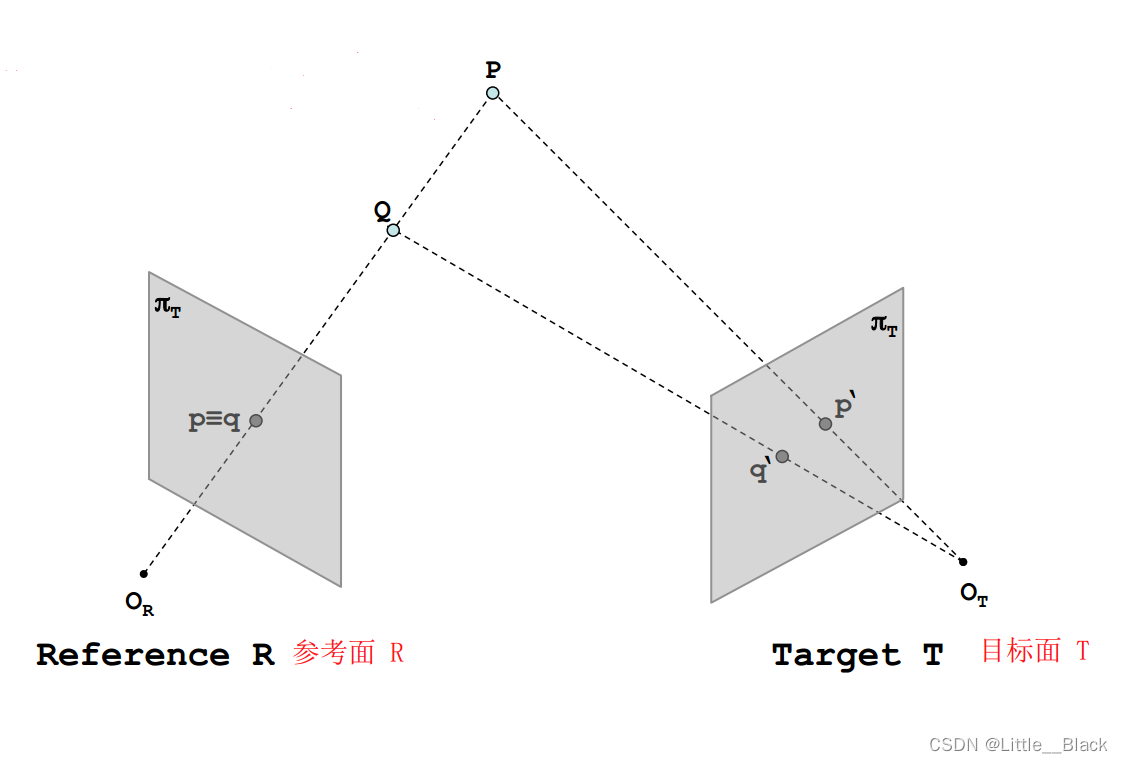
2.2 单目视觉
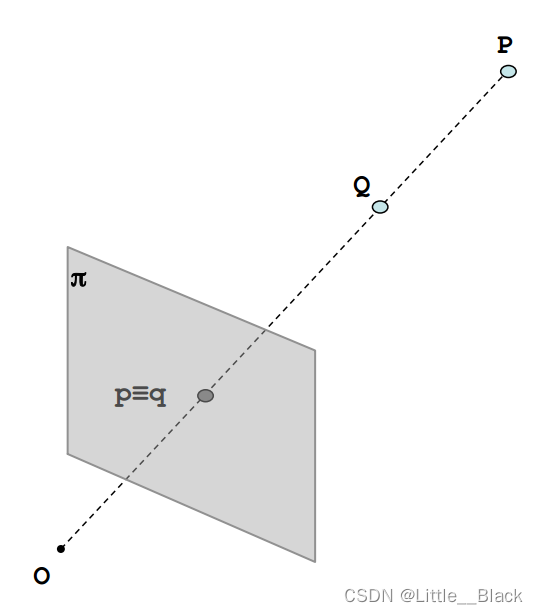
O点为相机的光心,π是摄像头的成像平面。
从图中可以看出,如果P点与Q点在同一条直线上,那么他们在图像上的成像点就是同一个点,也就是 p ≡ q p \equiv q p≡q ,那么也就看不出来他们在距离上的差异(也就无法知道Q在前还是P在前)。
2.3 双目视觉
正是在发现了单目系统的缺陷之后,我们将系统由一个摄像头增加到两个摄像头,这样也就构成了一个立体系统。如果我们可以在两幅图像中找到对应点,我们就可以通过三角测量的方法来求得深度
从图中可以很明显的看出,在增加了一个摄像头之后,P与Q在目标面T上的成像不在位于同一个点,而是有自己分别的成像点,也就是
q
′
q^{'}
q′ 与
p
′
p^{'}
p′。
那么,在我们给出了Reference与Target之后,我们应该如何解决参考面与目标面之间的对应关系呢?
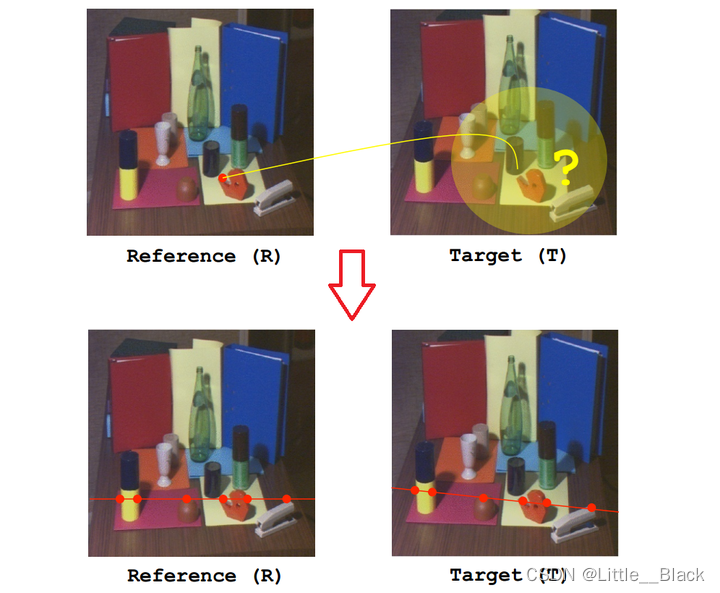
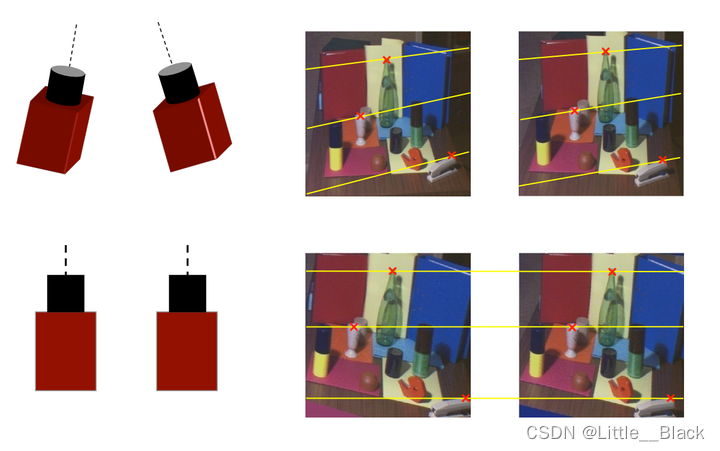
这个时候,就需要对极约束(极线约束),对极约束意味着一旦我们知道了立体视觉系统的对极几何之后,对两幅图像间匹配特征的二维搜索就转变成了沿着极线的一维搜索。
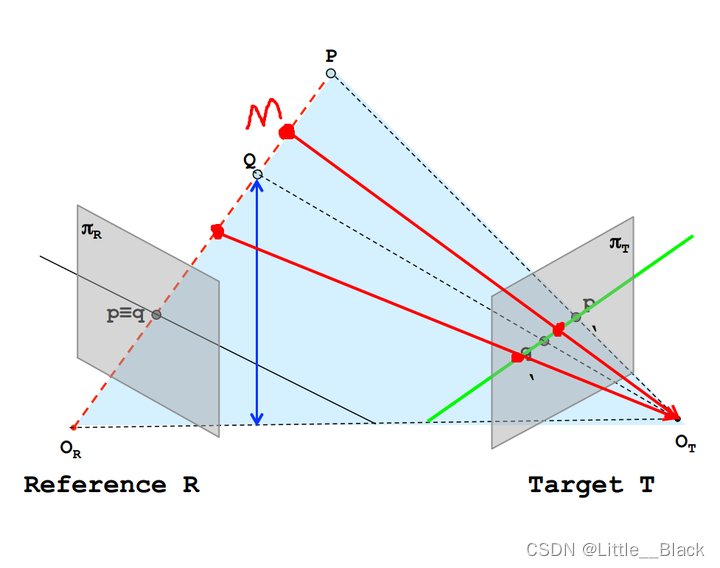
图中黑色实线为R平面一条极线,绿色为T平面一条极线。给定一幅图像上的一个特征,它在另一幅图像上的匹配视图一定在对应的极线上(图中将P,Q视为特征,可以看到在T上的成像在绿色直线上)
通常我们使用的立体视觉系统都是比较标准的系统,如图所示:
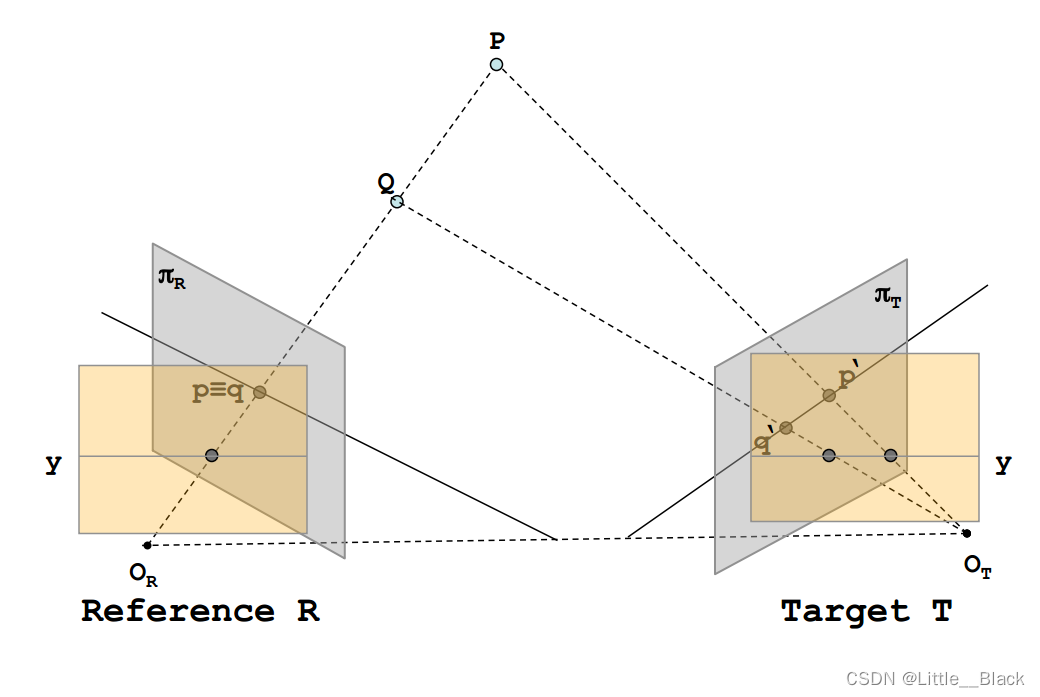
一旦我们知道了对应点的搜索区域,就可以将其从2D降到1D,这样就形成了更加方便的立体视觉,对应点都被约束再同一条极线上,也就是图中的y直线。下面给出一个实际的示例(在理想情况下,我们希望两个摄像头的参数是完全一致的,并且两个相机的位置是平行的)。
2.4 视差和深度计算原理
在我们已经确保两个摄像头的参数是完全一致的,并且两者的位置是平行之后,我们的关注点就落到了如何计算物体的深度信息,这也是最重要最关键的地方。下面给出的是标准立体视觉系统下的计算原理。
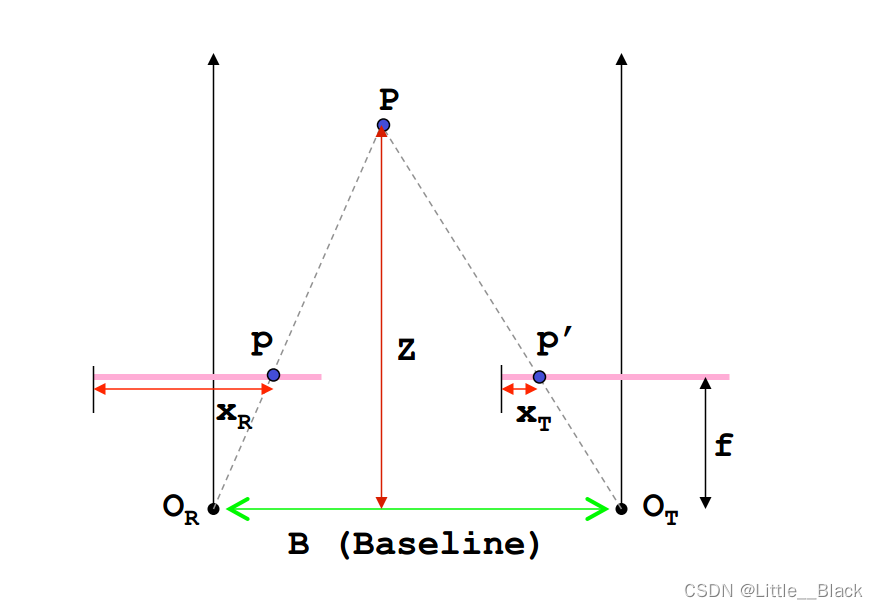
假设
P
P
P 为空间中的一点,
O
R
O_R
OR为左边摄像头的光心,
O
T
O_T
OT为右边摄像头的光心,摄像头的焦距为
f
f
f(光心到成像平面的距离),成像平面在图中用粉色线表示,
B
B
B表示两个摄像头光心之间的距离,也称为基线,
P
P
P在左右两个摄像机成像平面上的成像点分别为
p
p
p与
p
′
p'
p′,
x
R
x_R
xR与
x
T
x_T
xT为成像点的水平方向距离(通常我们得到的是像素坐标系下的
x
x
x左边,其单位为像素,因此需要转换为实际的物理长度,涉及到坐标系转换问题),
Z
Z
Z就是我们需要求的深度。
根据三角形相似定理( Δ P p p ′ \Delta Ppp' ΔPpp′~ Δ P O R O T \Delta PO_RO_T ΔPOROT):
B Z = B − ( x R − x T ) Z − f \frac{B}{Z}=\frac{B-(x_R-x_T)}{Z-f} ZB=Z−fB−(xR−xT)===> Z = B ⋅ f x R − x T = B ⋅ f D Z=\frac{B\cdot f}{x_R-x_T}=\frac{B\cdot f}{D} Z=xR−xTB⋅f=DB⋅f
其中 D = x R − x T D = x_R-x_T D=xR−xT 就是我们通常所说的视差(disparity)。
我们可以发现,深度Z是跟视差D成反比关系的,当视差D越小时,Z越大,物体离立体视觉系统也就越远, 当视差D越大,Z越小,物体离立体视觉系统也就越近。这一点和我们人眼系统是一样的,当我们观察离我们比较近的物体的时候,视差很大,可以获得的信息也就越多,当物体离我们很远的时候,视差很小,我们获得的信息也就很少了。
在图像处理中,我们通常用灰度值来表示视差信息,视差越大,其灰度值也就越大,在视差图像的视觉效果上表现出来就是图像越亮,物体离我们越远,其视差越小,灰度值也越小,视差图像也就越暗。
2.5 深度估计
- 工作原理:使用深度学习模型来预测2D图像中每个像素的深度
- 优势:可以从单个2D图像中获得3D深度信息
- 应用:增强现实、虚拟现实、3D重建
3.1
世界坐标系 —> 相机坐标系 —> 投影矩阵 —> 像素映射 —> 生成图片
- 世界坐标系和相机坐标系转换可以通过dcm矩阵计算求出:
def dcm(origin: np.ndarray, target: np.ndarray):
"""
3 * 3 矩阵 ,{x,y,z}T 将origin坐标系转换到target坐标系的dcm旋转矩阵
Args:
origin:
target:
Returns:
"""
matrix = np.zeros((3, 3))
for i in range(3):
for j in range(3):
matrix[i, j] = np.dot(target[i], origin[j])
return matrix.T
- 投影矩阵,可以参考pyrender.camera.py中的透视投影和正交投影矩阵,也可以根据自己的需求定制
- 通过前两步计算出2d投影点,会落在(-1, 1)范围内,通过像素映射完成3d点到2d点的投影
完整代码:
class Camera:
def __init__(self, scale, translation, resolution, znear=0.05, zfar=1000):
self.scale = np.array(scale) # 相机缩放
self.translation = np.array(translation) # 相机位移
self.resolution = np.array(resolution) # 2d 分辨率
self.znear = znear # 近平面
self.h_s = self.resolution / 2 # h/2 w/2
self.center = self.h_s # 2d投影面中心点
def camera_matrix(self):
"""
相机外参矩阵,世界坐标系转相机坐标系
Returns:
"""
world = np.eye(3)
camera = np.eye(3)
camera[-1, -1] = -1
matrix = np.eye(4)
matrix[:3, :3] = dcm(world, camera)
return matrix
def get_projection_matrix(self) -> np.ndarray:
"""
投影矩阵 业务定制
Returns:
"""
P = np.eye(4)
P[0, 0] = self.scale[0]
P[1, 1] = self.scale[1]
P[0, 3] = self.translation[0] * self.scale[0]
P[1, 3] = -self.translation[1] * self.scale[1]
P[2, 2] = -1
return P
class Render:
def __init__(self, camera: Camera):
self.camera = camera
def p_point(self, point: np.ndarray):
"""
投影点坐标
Args:
point: 点 4D 例如[0.5,0.5,0.5,1] 3d点需要填充1
Returns:
"""
p = self.camera.get_projection_matrix().dot(self.camera.camera_matrix().dot(point))
p = p[:2] / p[-1] * self.camera.h_s * np.array([1, -1]) + self.camera.center
return p
3.2 2.5D表示:
2D、2.5D和3D是描述物体和场景在空间中表示的三种方式,2D(平面)与3D(立体)又称为二维和三维,他们之间的区别是:2D你只能看到一个面,3D你能看到所有的面。
- 定义:
- 2D(二维):在2D中,物体或场景只有长度和宽度两个维度,常见的2D表示有图片、图画和屏幕上的图像
- 2.5D(二点五维):介于2D和3D之间,它通常描述的是一个场景从特定角度的深度信息,一个2.5D图像(例如深度图)为每个像素提供了一个深度值。
- 3D(三维):3D表示考虑了长度、宽度和深度,它为场景中的每个点提供了完整的三维坐标,常见的3D表示包括3D模型、点云等。
- 区别:
- 维度和信息完整性:2D缺乏深度信息;2.5D提供了从某个视角的深度信息;3D提供了完整的三维坐标信息。
- 视角依赖性:2.5D通常与特定的视角相关,而3D表示是视角无关的
- 数据复杂性:2D数据最简单,只需要x和y坐标;2.5D需要x、y和深度;3D需要x、y和z三个坐标。
- 联系:
- 从2D到2.5D: 如果你有一个2D图像和与之相关的深度信息,你可以得到一个2.5D表示。例如,使用深度相机如Kinect可以得到深度图。
- 从2D到3D: 通过多个2D图像和某种形式的结构从运动或立体视觉,你可以重建出3D场景或物体。但这比从2.5D到3D更为复杂。
- 从2.5D到3D: 从深度图中可以重建3D信息,例如生成一个点云。但由于2.5D信息通常是从一个视角获得的,因此可能不能完全恢复物体或场景的所有3D信息。
- 简而言之,2D、2.5D和3D代表了逐渐增加的空间信息和复杂性。2.5D是一个中间表示,提供了比2D更多的深度信息,但没有3D那么完整。
- 2D与2.5D的关系可以看成X轴与Y轴旋转了指定的角度后形成的新的屏幕
-
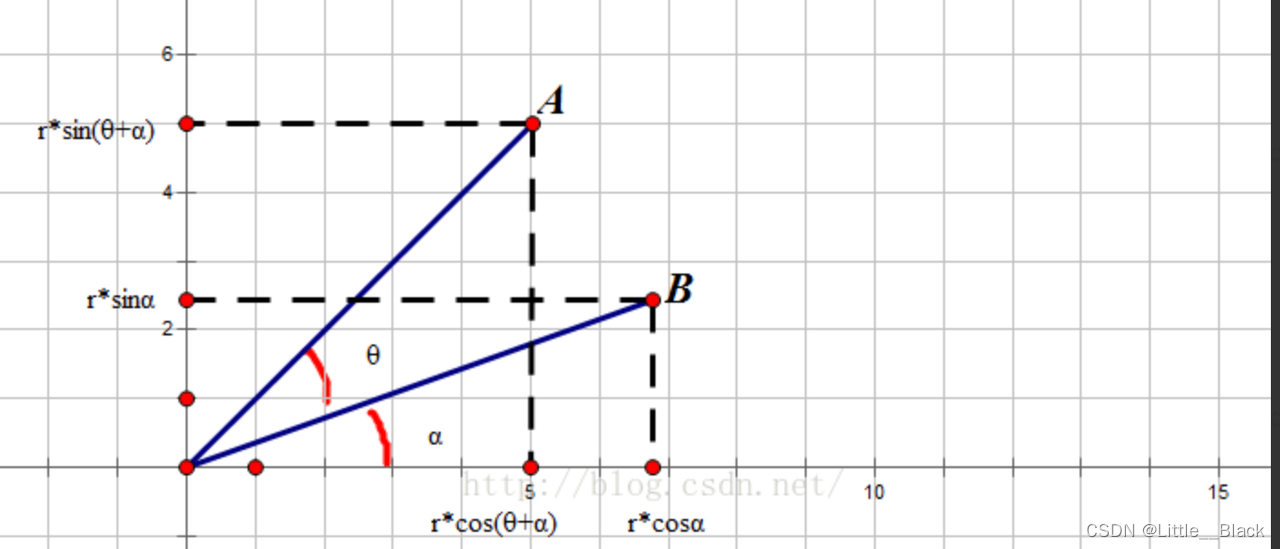
坐标旋转算法:
-
-
根据三角函数公式:
-
sin ( A + B ) = sin A ∗ cos B + sin B ∗ cos A \sin(A+B) = \sin A * \cos B + \sin B * \cos A sin(A+B)=sinA∗cosB+sinB∗cosA
-
cos ( A + B ) = cos A ∗ cos B − sin A ∗ sin B \cos(A+B)=\cos A * \cos B - \sin A * \sin B cos(A+B)=cosA∗cosB−sinA∗sinB
-
线段由 B O BO BO转到 A O AO AO,旋转后的坐标计算公式如下:
-
( x , y ) [ c o s θ s i n θ − s i n θ c o s θ ] = ( x ∗ c o s θ − y ∗ s i n θ , x ∗ s i n θ + y ∗ c o s θ ) (x,y) \left[ \begin{matrix} cos\theta &sin\theta \\ -sin\theta & cos\theta \end{matrix} \right]=(x*cos\theta-y*sin\theta, x*sin\theta+y*cos\theta) (x,y)[cosθ−sinθsinθcosθ]=(x∗cosθ−y∗sinθ,x∗sinθ+y∗cosθ)
-
通过矩阵的知识可以知道,X轴的基向量为[1,0];Y轴的基向量为[0,1]。有X和Y轴基向量组成的矩阵是一个单位矩阵。所以常规的平面直角坐标系的任何一点可以表示为:
( x , y ) [ 1 0 0 1 ] = ( x 1 , y 1 ) (x,y)\left[ \begin{matrix} 1 &0 \\ 0 & 1 \end{matrix} \right]=(x1, y1) (x,y)[1001]=(x1,y1)
为了将2D坐标映射到2.5D坐标,需要定义2.5D坐标系统使用的基向量。因为2.5D坐标系实际上是通过旋转X与Y轴实现的,所以通过旋转算法和上面的单位矩阵,可以得到新坐标系的X和Y轴基向量:
[ 1 0 0 1 ] [ c o s θ s i n θ − s i n α c o s α ] = [ c o s θ s i n θ − s i n α c o s α ] \left[ \begin{matrix} 1 &0 \\ 0 & 1 \end{matrix} \right]\left[ \begin{matrix} cos\theta &sin\theta \\ -sin\alpha & cos\alpha \end{matrix} \right]=\left[ \begin{matrix} cos\theta &sin\theta \\ -sin\alpha & cos\alpha \end{matrix} \right] [1001][cosθ−sinαsinθcosα]=[cosθ−sinαsinθcosα]
可以看出,将2D坐标系中的基向量转换为2.5D坐标系统的基向量时,结果其实就是旋转矩阵本身,这个旋转矩阵就是2.5D坐标系中的X和Y轴基向量。
注意:这里分别使用θ和α,是因为X和Y轴可以旋转不同的角度。如果 θ+α=90度,那么Sin(α)=Cos( θ );Cos(α)=Sin( θ )。上面的矩阵可以被替换为:
[ c o s θ s i n θ − c o s θ s i n θ ] \left[ \begin{matrix} cos\theta &sin\theta \\ -cos\theta & sin\theta \end{matrix} \right] [cosθ−cosθsinθsinθ]
现在定义2D坐标系为W(x,y),2.5D坐标系为G(x,y)。2D坐标系的X轴相对于2.5D坐标系X轴顺时针旋转30°,Y轴旋转60°。通过上面的公式可以得到W(x,y)对应的G(x,y):
G x = ( W x − W y ) ∗ c o s θ G_x = (W_x-W_y) * cos\theta Gx=(Wx−Wy)∗cosθ
G y = ( W x + W y ) ∗ s i n θ G_y = (W_x+W_y) * sin\theta Gy=(Wx+Wy)∗sinθ
2.5D坐标只需利用上面的工作进行逆运算就能得到:
W x = ( G x ∗ s i n θ + G y ∗ c o s θ ) / 2 ∗ s i n θ ∗ c o s θ W_x = (G_x*sin\theta+G_y*cos\theta)/2*sin\theta*cos\theta Wx=(Gx∗sinθ+Gy∗cosθ)/2∗sinθ∗cosθ
W y = ( G y ∗ c o s θ − G x ∗ s i n θ ) / 2 ∗ s i n θ ∗ c o s θ W_y = (G_y*cos\theta-G_x*sin\theta)/2*sin\theta*cos\theta Wy=(Gy∗cosθ−Gx∗sinθ)/2∗sinθ∗cosθ
4.1 多视图网络
- 工作原理:使用从不同角度的多个2D视图的信息来提取3D特征。
- 应用:3D物体识别、3D重建。
- 优点:能够从不同的2D视图中捕获3D信息。
4.2 融合2D和3D特征
- 工作原理:将2D图像特征与3D数据特征(例如点云)结合起来。
- 应用:3D物体检测、场景分割。
- 优点:利用了2D图像和3D结构的强大信息。



![[Ubuntu 18.04] 搭建文件夹共享之Samba服务器](https://img-blog.csdnimg.cn/f0fd09f6eead4bf5b2116fb3578069fb.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBATmV1dGlvbndlaQ==,size_20,color_FFFFFF,t_70,g_se,x_16)