目录
一、位图
1、位图的概念
2、位图的实现
①、基本结构
②、set
③、reset:
④、test
⑤、问题:
⑥、位图优缺点及应用:
⑦、完整代码及测试
二、布隆过滤器
1、布隆过滤器的提出
2、布隆过滤器的实现
①、基本结构
②、三个Hash仿函数实现
③、 set
④、 test
⑤、 删除
⑥、完整代码及测试
⑦、 优缺点
一、位图
1、位图的概念
1. 面试题给 40 亿个不重复的无符号整数,没排过序。给一个无符号整数,如何快速判断一个数是否在这 40 亿个数中。【腾讯】查找一个数在不在,其实就是key模型,那常见的几种解法如下:
- 1. 遍历,时间复杂度O(N)
- 2. 排序(O(NlogN)),利用二分查找: logN
- 3. 位图解决
前两个方案的问题:数据量太大,放不到内存中。
我们可以先考虑40亿个不重复的无符号整数占多少空间?10亿个字节是1个G,而40亿个整数,一个整数4个字节,即需要160亿(9个0)个字节,即需要16G,这些数据太占空间了,内存根本存不下。位图是如何解决的呢?
所谓位图,就是用每一bit位来存放某种状态,适用于海量数据,数据无重复的场景。通常是用 来判断某个数据存不存在的。数据是否在给定的整形数据中,结果是在或者不在,刚好是两种状态,那么可以使用一 个二进制比特位来代表数据是否存在的信息,如果二进制比特位为 1 ,代表存在,为0 代表不存在。(位图是直接定址法的一种)而40亿个数据,我们起码要开42亿个空间,为什么?假如有一个数是4200000000,你要映射到哪个位置?我们开空间是要开数据的范围,才能满足全部映射进去。那我们直接开2^32个空间(这里说的每个位置就是比特位,2^32≈42亿9千万,因为位图就是每个位置存的bit位),来对所有数直接定址法建立映射关系,即我们开辟42亿9千万个bit位,先把42亿9千万看成字节,则其≈4G,而4G≈4000M(或者MB),而这里是比特位,故要除以8,4000/8=500M,故位图存储占用500M即可,这既节省了空间,效率又很高(效率高,因为直接定址法没哈希冲突)
2、位图的实现
①、基本结构
位图的初始化应该是开多少个比特位,因为位图就是利用存比特位来节省的空间,你传的N也是比特位,其次是vector的类型是int,因为类型不支持是比特位的
class bitset
{
public:
bitset(size_t N)
{//N代表要开多少比特位(简称:位)
_bits.resize(N / 32 + 1, 0);
_num = N;
}
private:
//int* _bits;
std::vector<int> _bits;
size_t _num; //表示存了多少个比特位,映射存储的多少个数据
};_bits.resize(N / 32 + 1, 0);为什么要N / 32 + 1 呢?
因为vector的resize开空间是以整形为单位的,而位图的每个位置存的都是一个比特位,而一个整形32个比特位,N代表的是比特位的位数,则N/32得到的是整形的个数,但是还需+1,为什么?比如N=100,100/32=3,那意思就是开3个整形,即32*3=96个位,但是100还是没位置放,你就开了96个位(同理97,98...都没位置),为了避免这个问题我们会+1,即多开一个整形,那最多只会浪费31个位
②、set
功能:把第x个位设置为1,表示这个位存在
void set(size_t x)
{//把第x位设置为1,表示此位置存在
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
_bits[index] |= (1 << pos); //对于这个整数第pos的位置或1
//1<<pos表示先把1移动到和pos相同位置的比特位上,因为pos=几,1就会左移几位
//|=表示是或,即除了pos位置的位要变成1,其余位置都不受影响
}其实就是考察怎么把一个整数的某个位变成1,还不影响其他的31位
小端机的左移是向左 , 大端机的左移是向右
这是c语言设计的bug,历史遗留问题,易让人误导,计算机技术发展百花齐放,再融合统一





③、reset:
功能:把第x个位置成0,表示这个位不存在
void reset(size_t x)
{//把第x位设置为0,表示此位置不存在
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
_bits[index] &= ~(1 << pos); //对于这个整数第pos的位置与0
}
④、test
功能:判断第x位在不在(即判断x所映射的位是否为1)
//判断x在不在(也就是说x映射的位是否为1)
bool test(size_t x)
{
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
return _bits[index] & (1 << pos); //结果非0为真,0则为假
}
⑤、问题:
理论上这40亿个数不可能存在内存当中,应该存在文件中,那我们就要去读文件,40亿个数因为要按范围开,故要开42亿9千万的空间,怎么开这么大的空间?常见方法如下:
①、bitset bs(-1); //因为位图的构造函数参数是size_t,那-1若看为无符号数就是整形的最大值
②、bitset bs(0xffffffff);
⑥、位图优缺点及应用:
优点:节省空间、效率高
缺点:只能处理整形
应用:
- 快速查找某个数据是否在一个集合中
- 排序 + 去重
- 求两个集合的交集、并集等
- 操作系统中磁盘块标记
⑦、完整代码及测试
#pragma once
#include<iostream>
#include<vector>
namespace mz
{
class bitset
{
public:
bitset(size_t N)
{//N代表要开多少比特位(简称:位)
_bits.resize(N / 32 + 1, 0);
_num = N;
}
void set(size_t x)
{//把第x位设置为1,表示此位置存在
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
_bits[index] |= (1 << pos); //对于这个整数第pos的位置或1
//1<<pos表示先把1移动到和pos相同位置的比特位上,因为pos=几,1就会左移几位
//|=表示是或,即除了pos位置的位要变成1,
++_num;
}
void reset(size_t x)
{//把第x位设置为0,表示此位置不存在
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
_bits[index] &= ~(1 << pos); //对于这个整数第pos的位置与0
--_num;
}
//判断x在不在(也就是说x映射的位是否为1)
bool test(size_t x)
{
size_t index = x / 32; //算出映射的位置在第几个整数
size_t pos = x % 32; //算出x在整数的第几个位
return _bits[index] & (1 << pos); //结果非0为真,0则为假
}
private:
//int* _bits;
std::vector<int> _bits;
size_t _num; //表示存了多少个比特位,映射存储的多少个数据
};
void test_bitset()
{
bitset bs(100);
bs.set(99);
bs.set(98);
bs.set(97);
bs.reset(98);
for (size_t i = 0; i < 100; ++i)
{
printf("[%d]:%d\n", i, bs.test(i));
}
}
}部分测试结果如下:
二、布隆过滤器
1、布隆过滤器的提出
我们在使用新闻客户端看新闻时,它会给我们不停地推荐新的内容,它每次推荐时要去重,去掉 那些已经看过的内容。问题来了,新闻客户端推荐系统如何实现推送去重的? 用服务器记录了用 户看过的所有历史记录,当推荐系统推荐新闻时会从每个用户的历史记录里进行筛选,过滤掉那 些已经存在的记录。 如何快速查找呢?
- 1. 用哈希表存储用户记录,缺点:浪费空间
- 2. 用位图存储用户记录,缺点:位图一般只能处理整形,如果内容编号是字符串,就无法处理了
- 3. 将哈希与位图结合,即布隆过滤器
布隆过滤器是 由布隆( Burton Howard Bloom )在 1970 年提出的 一种紧凑型的、比较巧妙的 概 率型数据结构 ,特点是 高效地插入和查询,可以用来告诉你 “ 某样东西一定不存在或者可能存 在 ” ,它是用多个哈希函数,将一个数据映射到位图结构中。此种方式 不仅可以提升查询效率,也 可以节省大量的内存空间 。

2、布隆过滤器的实现
①、基本结构
一般布隆过滤器存的是字符串或结构体等,一般不会是整形,因为整形就用位图来存了
布隆过滤器底层就是用位图实现的,因为字符串比较常用,故我们直接把字符串作为默认模板参数,其他三个Hash模板参数表示的是用三个位置来映射一个值
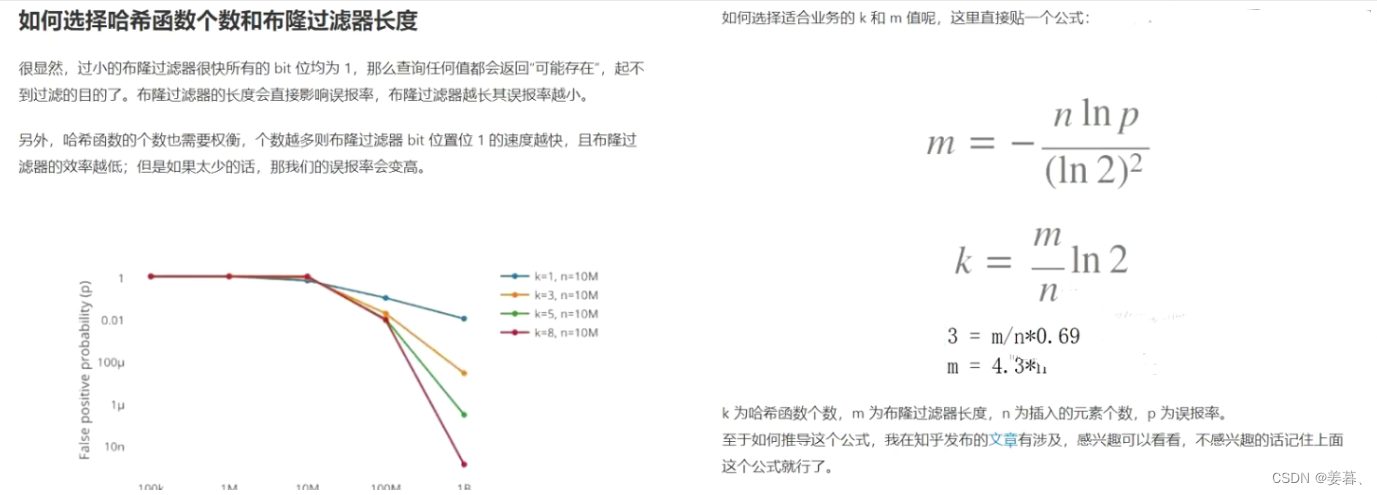
构造函数开多少个空间?
有大佬已经计算过了,10个元素就需要长度为43位,那我们干脆初始开个5倍
template<class K = string, class Hash1 = HashStr1, class Hash2 = HashStr2, class Hash3 = HashStr3>
class bloomfilter
{
public:
//直接上来开满会有问题,因为可能我本身可能就没映射几个值
//那就根据你大概会存多少个数据,来对应开空间
//到底开多少比较好有人算过,即你存多少个值就要映射到多少个位
bloomfilter(size_t num)
:_bs(5 * num)
,_N(5 * num)
{}
private:
bitset _bs; //底层是一个位图
size_t _N;
};②、三个Hash仿函数实现
因为要用三个映射位置来映射一个值,故要写三个字符串转为整形的函数,而又因为string类型比较常用,这三个仿函数会作为默认模板参数
下面是能降低哈希冲突的字符串算法(我们下面三个仿函数就选用下面三个算法):

struct HashStr1
{
size_t operator()(const string& str)
{ //运用BKDRHash
size_t hash = 0;
for (size_t i = 0; i < str.size(); ++i)
{
hash *= 131;
hash += str[i];
}
return hash;
}
};
struct HashStr2
{
size_t operator()(const string& str)
{ //运用RSHash
size_t hash = 0;
size_t magic = 63689; //魔数
for (size_t i = 0; i < str.size(); ++i)
{
hash *= magic;
hash += str[i];
magic *= 378551;
}
return hash;
}
};
struct HashStr3
{
size_t operator()(const string& str)
{ //运用SDBMHash
size_t hash = 0;
for (size_t i = 0; i < str.size(); ++i)
{
hash *= 65599;
hash += str[i];
}
return hash;
}
};③、 set
函数是想把key这个数标志为存在,而我们说了要用三个位置来映射这个key值,则调用Hash仿函数先计算出字符串的映射位置,%_N是因为我们刚开始给位图就开了_N个比特位,你算出的映射位置很可能大于_N,故都%_N,既能存储也能统一,则一个key值就能用三个映射位置来表示了
注:Hash1是仿函数类型,Hash1()是仿函数对象,当然你也可以写为Hash1 hs1; hs1(key) % _N;但是明显更麻烦
void set(const K& key)
{
size_t index1 = Hash1()(key) % _N;//利用Hash1类型的匿名对象
size_t index2 = Hash2()(key) % _N;
size_t index3 = Hash3()(key) % _N;
_bs.set(index1);//表示index1这个位置存在
_bs.set(index2);
_bs.set(index3);
}④、 test
功能:判断key值存不存在
因为一个值用了三个映射位置,故我们判断计算出key的三个映射位置在位图中是否同时存在,同时存在key值才存在,反之有一个不存在就肯定不存在
bool test(const K& key)
{
size_t index1 = Hash1()(key) % _N;
if (_bs.test(index1) == false)
return false;
size_t index2 = Hash2()(key) % _N;
if (_bs.test(index2) == false)
return false;
size_t index3 = Hash3()(key) % _N;
if (_bs.test(index3) == false)
return false;
return true; //但这里也不一定是真的在,还是可能存在误判
//判断在,是不准确的,可能存在误判
//判断不在,是准确的
}⑤、 删除
布隆过滤器不能直接支持删除工作,因为在删除一个元素时,可能会影响其他元素。
一种支持删除的方法:将布隆过滤器中的每个比特位扩展成一个小的计数器,插入元素时给 k个计 数器 (k 个哈希函数计算出的哈希地址 ) 加一,删除元素时,给 k个计数器减一,通过多占用几倍存储 空间的代价来增加删除操作。缺陷:1. 无法确认元素是否真正在布隆过滤器中2. 存在计数回绕

void reset(const K& key)
{
//将映射的位置给置0就可以?
//不支持删除,可能会存在误删,故布隆过滤器一般不支持删除
}⑥、完整代码及测试
#pragma once
#include"bitset.h"
#include<string>
using std::string;
using std::cout;
using std::endl;
namespace mz
{
struct HashStr1
{
size_t operator()(const string& str)
{ //运用BKDRHash
size_t hash = 0;
for (size_t i = 0; i < str.size(); ++i)
{
hash *= 131;
hash += str[i];
}
return hash;
}
};
struct HashStr2
{
size_t operator()(const string& str)
{ //运用RSHash
size_t hash = 0;
size_t magic = 63689; //魔数
for (size_t i = 0; i < str.size(); ++i)
{
hash *= magic;
hash += str[i];
magic *= 378551;
}
return hash;
}
};
struct HashStr3
{
size_t operator()(const string& str)
{ //运用SDBMHash
size_t hash = 0;
for (size_t i = 0; i < str.size(); ++i)
{
hash *= 65599;
hash += str[i];
}
return hash;
}
};
template<class K = string, class Hash1 = HashStr1, class Hash2 = HashStr2, class Hash3 = HashStr3>
class bloomfilter
{
public:
//直接上来开满会有问题,因为可能我本身可能就没映射几个值
//那就根据你大概会存多少个数据,来对应开空间
//到底开多少比较好有人算过,即你存多少个值就要映射到多少个位
bloomfilter(size_t num)
:_bs(5 * num)
,_N(5 * num)
{}
void set(const K& key)
{
size_t index1 = Hash1()(key) % _N;//利用Hash1类型的匿名对象
size_t index2 = Hash2()(key) % _N;
size_t index3 = Hash3()(key) % _N;
_bs.set(index1);
_bs.set(index2);
_bs.set(index3);
}
bool test(const K& key)
{
size_t index1 = Hash1()(key) % _N;
if (_bs.test(index1) == false)
return false;
size_t index2 = Hash2()(key) % _N;
if (_bs.test(index2) == false)
return false;
size_t index3 = Hash3()(key) % _N;
if (_bs.test(index3) == false)
return false;
return true; //但这里也不一定是真的在,还是可能存在误判
//判断在,是不准确的,可能存在误判
//判断不在,是准确的
}
void reset(const K& key)
{
//将映射的位置给置0就可以?
//不支持删除,可能会存在误删,故布隆过滤器一般不支持删除
}
private:
bitset _bs; //底层是一个位图
size_t _N;
};
void test_bloomfilter()
{
bloomfilter<string> bf(100); //这里不给string,直接用<>也行,因为string是默认的
bf.set("abcd");
bf.set("aadd");
bf.set("bcad");
cout << bf.test("abcd") << endl;
cout << bf.test("aadd") << endl;
cout << bf.test("bcad") << endl;
cout << bf.test("cbad") << endl;
}
}
⑦、 优缺点
布隆过滤器优点
- 1. 增加和查询元素的时间复杂度为:O(K), (K为哈希函数的个数,一般比较小),与数据量大小无
- 关
- 2. 哈希函数相互之间没有关系,方便硬件并行运算
- 3. 布隆过滤器不需要存储元素本身,在某些对保密要求比较严格的场合有很大优势
- 4. 在能够承受一定的误判时,布隆过滤器比其他数据结构有这很大的空间优势
- 5. 数据量很大时,布隆过滤器可以表示全集,其他数据结构不能
- 6. 使用同一组散列函数的布隆过滤器可以进行交、并、差运算
布隆过滤器缺陷
- 1. 有误判率,即存在假阳性(False Position),即不能准确判断元素是否在集合中(补救方法:再
- 建立一个白名单,存储可能会误判的数据)
- 2. 不能获取元素本身
- 3. 一般情况下不能从布隆过滤器中删除元素
- 4. 如果采用计数方式删除,可能会存在计数回绕问题