前言
主要是介绍库的使用,做笔记区
首先搜索的时候有个问题 一直在我脑子里 hhh 就是MMlab其实还有一个叫mmdetection3d 的库,然后搜的时候发现 hhh 有网友和我一样的疑惑:
OpenPCDet和mmdetection3d有什么区别 ? - 知乎 (zhihu.com)
这是OpenMMLab官方的回复:
OpenPCDet 和 mmdetection3d 是两个不同的团队开发和维护的。
从功能角度上讲,mmdet3d 支持的场景和任务更多(包含室内室外场景的物体检测和点云分割),各种模态设定更全面(多模态,以及点云或图像的单模态),总体支持的模型数量更多,覆盖面更广,可以适应不同用户多样的使用和研发需求。OpenPCDet 主要聚焦在基于点云的 3D 目标检测这一种设定上,代码结构相对简单轻量一些。从更新维护的频率上看,MMDet3D 的更新和维护更加频繁,保持了月度的版本更新。
作者:OpenMMLab
链接:https://www.zhihu.com/question/489303511/answer/2206147084
来源:知乎,著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
这个系列主要是自己学习过程的记录,本文首次书写于: December 24, 2022 可能会随着时间的变化 此教程会有过时概念哦
测试环境
测试环境:
- 本机环境:i9-12900KF, GPU 3090, CUDA 11.3
- 本机系统:Ubuntu 20.04, ROS noetic (Python 3.8)
- 使用的:https://github.com/Kin-Zhang/OpenPCDet commit 4713332
数据集 (无ROS)
注意一定要先安装OpenPCDet 才能进行ROS 实时/BAG的显示哈
以下为 能运行的版本
git clone https://github.com/Kin-Zhang/OpenPCDet
cd OpenPCDet
pip install torch==1.10.0+cu113 torchvision==0.11.0+cu113 torchaudio==0.10.0 -f https://download.pytorch.org/whl/torch_stable.html
pip install spconv-cu113
sudo apt-get install python-setuptools
# have some potential risks
sudo chown -R $USER /usr/local/lib/python3.8/
sudo chown -R $USER /usr/local/bin/
# have some potential risks
python3 setup.py develop
然后截图如下为成功安装:

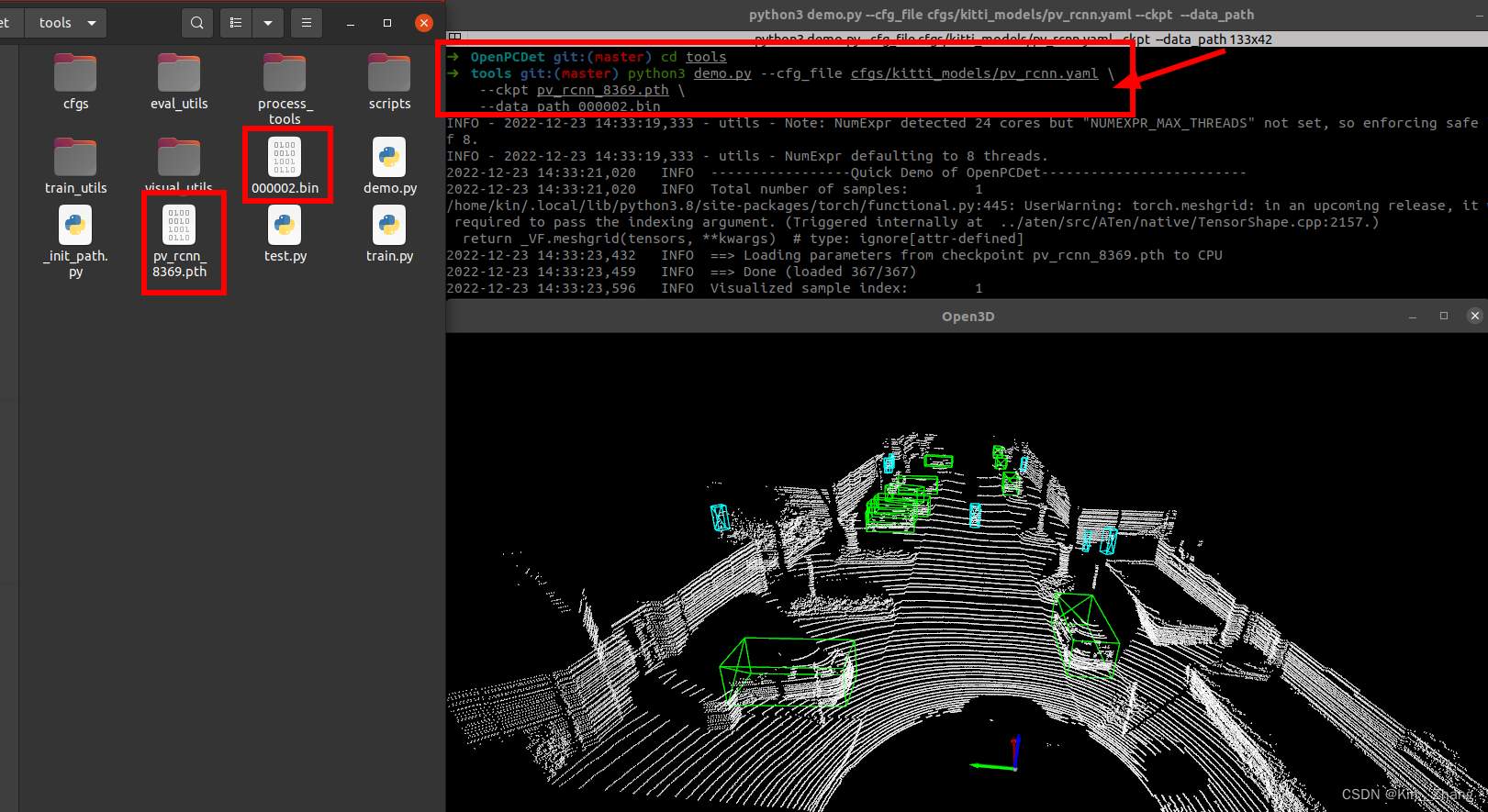
然后我们下载一个model 和 放一个kitti的一帧数据,运行demo.py即可看到效果:
cd tools
python3 demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml \
--ckpt pv_rcnn_8369.pth \
--data_path 000002.bin
Issues
遇到的错误总结:
-
pip install failing with: OSError: [Errno 13] Permission denied on directory, reference link
给权限就行
# have some potential risks sudo chown -R $USER /usr/local/lib/python3.8/ sudo chown -R $USER /usr/local/bin/ # have some potential risks -
CUDA版本必须和自己的本机安装的版本对应上,因为develop.py里会检查安装的pytorch版本、CUDA、spconv
显卡驱动与CUDA安装:
Ubuntu下的NVIDIA显卡【驱动&CUDA 安装与卸载】
-
THC/THC.h: No such file or directory
!!!Torch不能高于10.0,相关issue链接:https://github.com/open-mmlab/mmdetection3d/issues/1332,https://github.com/1ytic/warp-rnnt/issues/35
-
RuntimeError: Python version >= 3.8 required.
解决办法,使用py3.8
ROS 实时/BAG
注意一定要先安装好OpenPCDet哈!并且是直接安装在系统默认的py38下的 这样才能和ROS链接起来,后面我放个Dockerfile 这样无论什么版本都能拿这个topic就行
参考链接为:
- https://github.com/Cram3r95/OpenPCDet-ROS
- https://github.com/kwea123/ROS_notes
结合参考内容自己进行了一点修改,主要是 以2的boundingbox为主 去掉1的一些没啥必要的依赖,代码地址为:https://github.com/Kin-Zhang/OpenPCDet_ros,依赖处理情况 基本就是有ROS即可,但是仅在ROS noetic测试了 因为noetic 默认的py3.8
我后面再好好重构一下,但是现在也是能用的 hhh 只是README 写的可能太简洁了,配合这个博文读会更好一些
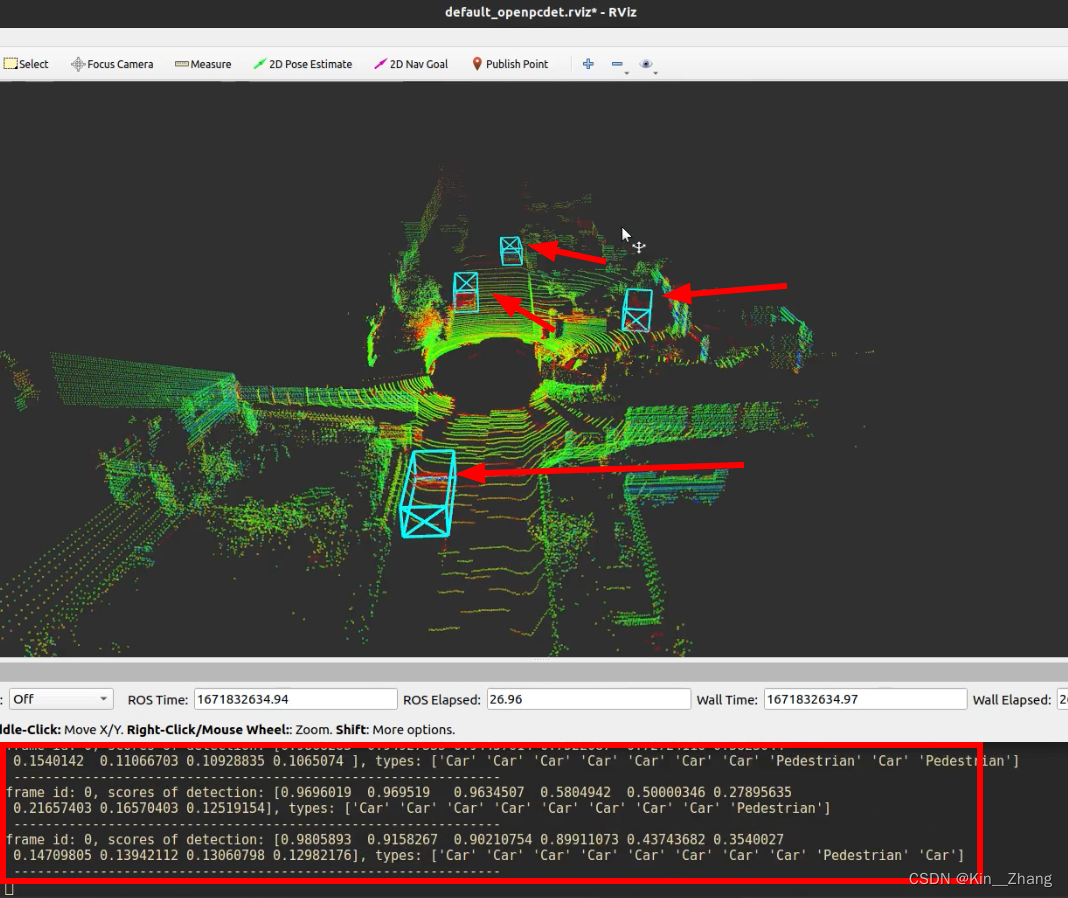
实时跑的情况,就是数据在BAG里,理论上这个跑通了 也可以放在实际车上部署(只是py估计真用上产品实车肯定还是不太行的哈
Issue
- glog print在ros_init后无法log使用,详情见:https://github.com/ros/ros_comm/issues/1384
后面有问题可以评论区留言 我再加进来
赠人点赞 手有余香 😆;正向回馈 才能更好开放记录 hhh