背景
GNSS是一种成熟的定位导航技术,广泛应用于多个行业和场景。随着技术和需求的不断发展,出现了一种被称为“多实例”的应用与测试方式。
如无人机、航空航天和机器人等领域,开始采用双天线来实现姿态测量。这种方法利用两个独立的GNSS天线来测量终端设备的姿态,包括俯仰、偏航和横滚等。通过测量信号到达两个天线的时间差以及信号的方位角,可以准确确定接收器的姿态,这对这些行业而言至关重要。
在自动驾驶、精确定位和测量测绘等领域,实时差分定位(RTK)的应用也日益普及。它要求在一个场景中建立基准站和流动站,以使用校准信号获取更精确的定位和导航信息。
在这些多天线测试场景中,需要对每根天线进行同步的模拟和仿真。此外,在测试行业和场景中,可能需要协调测试多个待测件,并在同一场景中对每个待测件进行仿真。由于这两种测试需要在同一场景中进行,并对同步、精度和构建等方面有相对严格的要求,因此需要专门的测试方法和方案,可以将其称为“多实例”测试方案。
面临的问题
针对这些多实例测试场景和方法,目前面临了一系列问题和挑战:
在评估自动驾驶和驾驶辅助系统时,GNSS模拟器生成车辆信号,但是仍需要解决以下问题:
1. 车辆如何与其他具有不同轨迹和速度的车辆进行互动?
2. 如何模拟防撞情况的处理?
3. 如何应对GPS和GNSS信号拒绝的情况?
这些问题直接关系到最终产品的安全性。因此,需要考虑进行多轨迹与多车辆的GNSS仿真,实现更准确地模拟这些情景。此外,还存在一些单接收器和双天线配置的应用,它们同样需要利用这种仿真技术。
另一方面,测试无人驾驶飞行器(UAV)如无人机也涉及到一系列挑战:
1. 飞行器如何与其他UAV进行交互?不同的交互场景可能会导致性能差异
2. 如何应对GPS和GNSS信号拒绝的情况?
3. 如何实现待测件的姿态测量模拟?
所以需要仿真和测试这些多个待测件之间的交互场景,以更好地理解它们的性能表现。此外,考虑到许多无人机应用依赖多根天线进行定位和导航,还需要独立模拟每根天线,实现更精确的验证效果。
一个全面的测试计划必须考虑尽可能多的场景,以确保产品的安全性。虽然GNSS模拟器可以模拟所需的GNSS信号,但模拟多个RF信号并不是一项容易的任务。要在实验室中进行这种测试,就必须独立地模拟每个轨迹或每个天线接收到的信号,这与将车辆或设备放置在室外测试大不相同。
此外在传统的GNSS仿真测试方法中,通常需要多台GNSS模拟器协同工作,通过不同的射频端口将信号输出到多个天线或待测设备,以实时模拟不同轨迹的情况。这种多设备连接的测试方法,不仅需要采购大批量的、价格高昂的、仿真专用的设备,还需要工程师花费大量时间做前期的连接,调试,集成以及封装。而当未来需求变更的时候,此类方案却缺少灵活、快速、高效的升级与扩展能力。
德思特如何解决这个问题
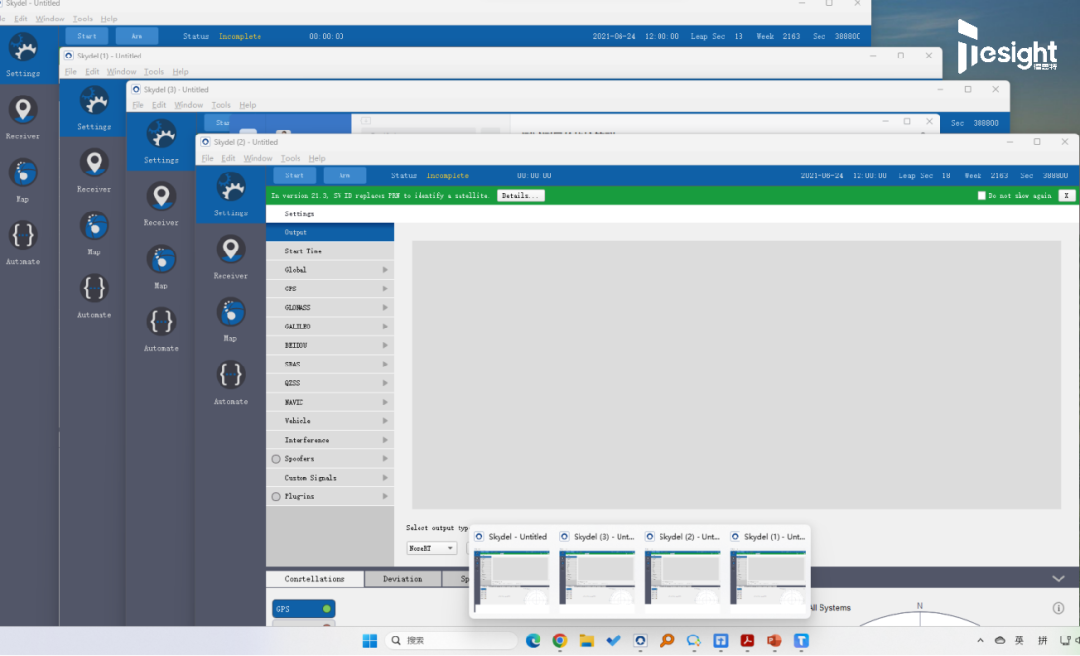
德思特Safran Skydel仿真引擎软件可以在德思特Safran GSG-8 GNSS模拟器上运行,并提供了市场上大多数模拟器所不具备的——多实例功能。从一个主Skydel实例,可以控制运行在同一硬件上的几个Skydel从属实例,每个实例代表一个独立的轨迹、车辆或天线。
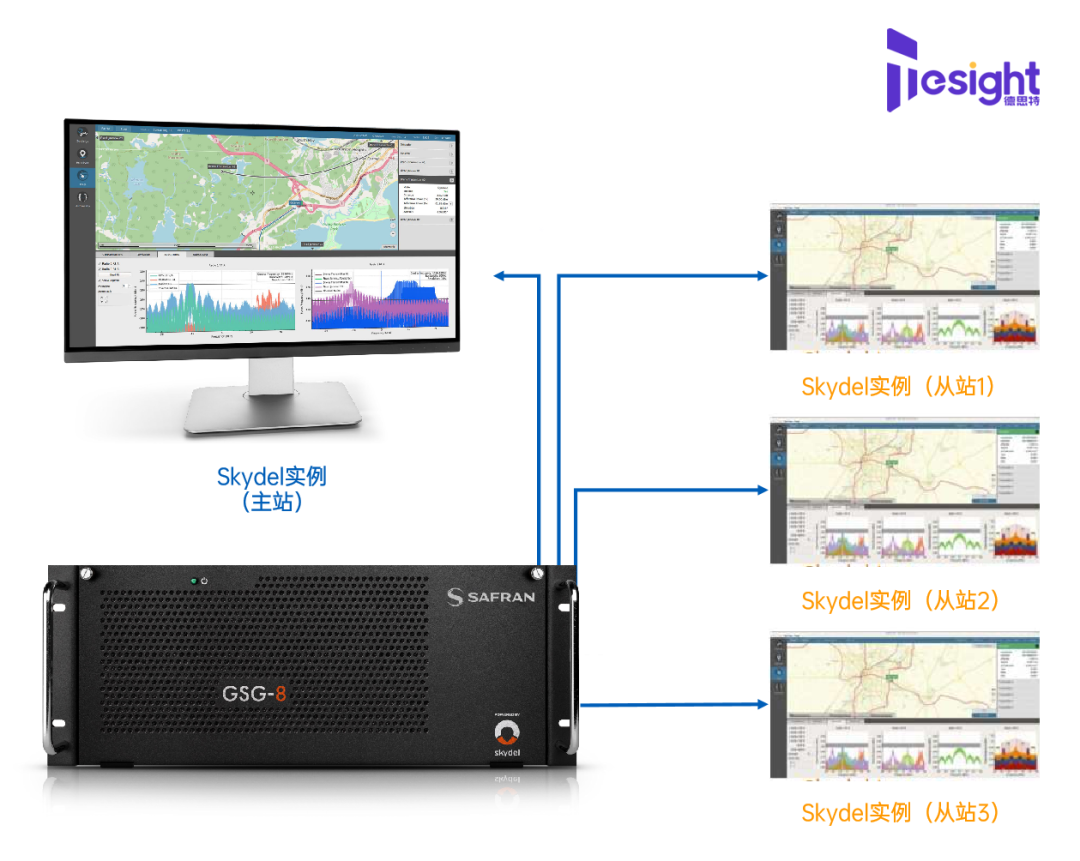
德思特Safran Skydel软件可以轻松启动多次,这本质上等于将你购买的一个GNSS模拟器转变为多个模拟器。这可以用于完成大量“多实例”的应用,即多个天线、RTK流动站和基站、多辆车辆、单个车辆与多个干扰等。
迄今为止,德思特Safran是唯一可以做到这一点的仿真提供商,无需额外购买独立的软件,在现有软件基础上“复制”,即可完成多个独立实例同时仿真,无需额外的软硬件,即可在一个盒子内经济高效的完成多实例仿真。
从硬件上讲,德思特Safran GSG-8最多可以支持4个独立的射频输出端口,因此可以在一个盒子内同时进行最多四条独立实例(车辆、轨迹或来自一个设备的独立信号),此外由于它们运行在相同的硬件上,德思特Safran GSG-8也提前为您解决了时间同步等令人头痛的问题,德思特Safran GSG-8自身提供了误差只有18ns的同步机制,满足大量需要高精时间同步的需求。
德思特Safran GNSS多实例模拟方案为测试人员提供了无可比拟的控制水平、便利性和灵活性,可以模拟多个射频信号,而不需要购买额外的硬件。而如果你需要更多的实例,由于德思特Safran的COTS硬件驱动的架构,您可以随时添加GPU与SDR实现扩展,使之成为世界上最具可扩展性、成本效益的多天线仿真解决方案。
以上为德思特Safran GNSS模拟器的多实例应用浅析(一)的主要内容,在下一章将为大家介绍多实例方案的应用场景。