Livox Tele-15使用教程
- 引言
- 1 下载并安装Livox Viewer
- 1.1 打开Livox Viewer程序
- 1.2 设备ip链接
- 2 览沃Livox SDK二次开发并封装ROS
- 2.1 览沃Livox SDK安装
- 2.2 览沃Livox livox_ros_driver 安装
- 2.3 Launch 配置文件描述
- 3 保存lvx格式的数据文件
- 3.1 使用览沃Viewer保存lvx文件
- 3.2 使用Livox-SDK保存lvx文件
- 3.3 将lvx文件(v1.0/v1.1)转换为rosbag文件(仅支持Ubuntu系统)
- 4 外参标定与点云显示
- 4.1 使用 Livox Viewer 标定外参
- 4.2 在Livox Ros Driver 中修改 config 配置表
引言
激光雷达型号:Livox Tele-15
用于配置的系统:Ubuntu 18.04
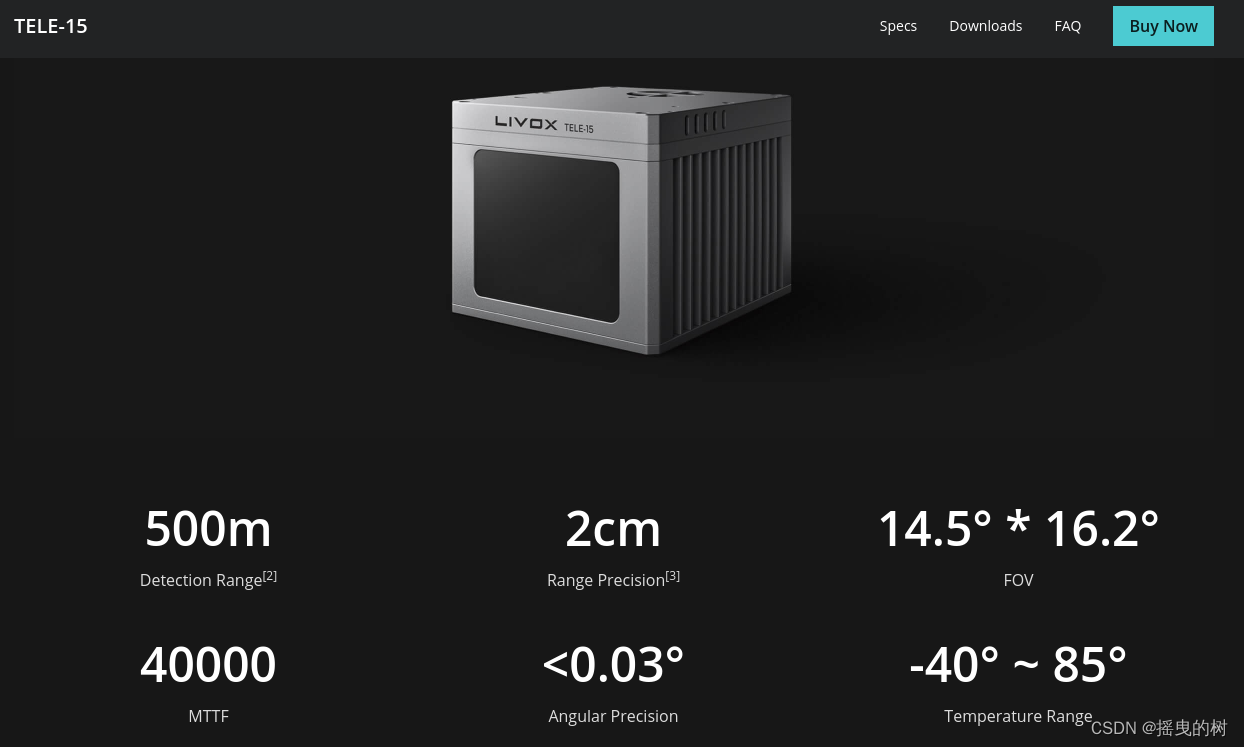
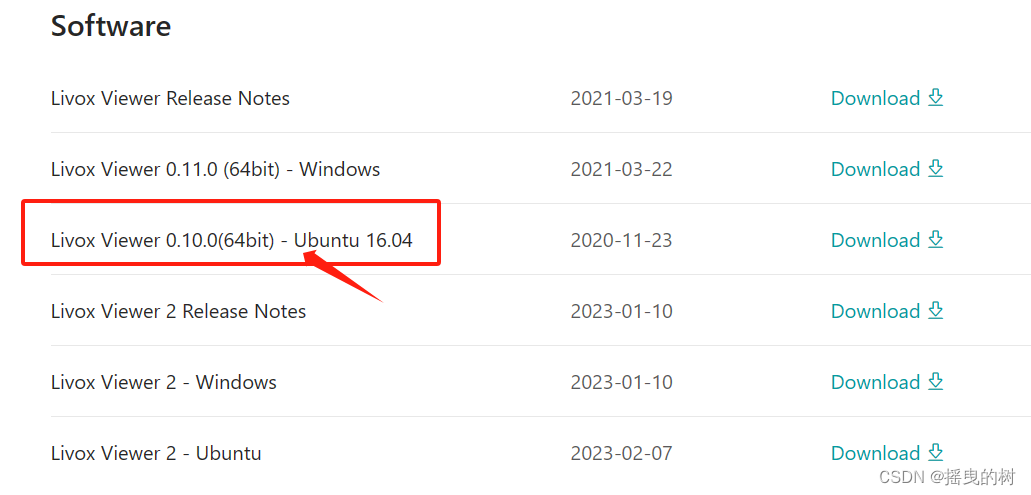
1 下载并安装Livox Viewer
- 前往Livox官网,建议下载如图的Livox Viewer版本
用户手册链接
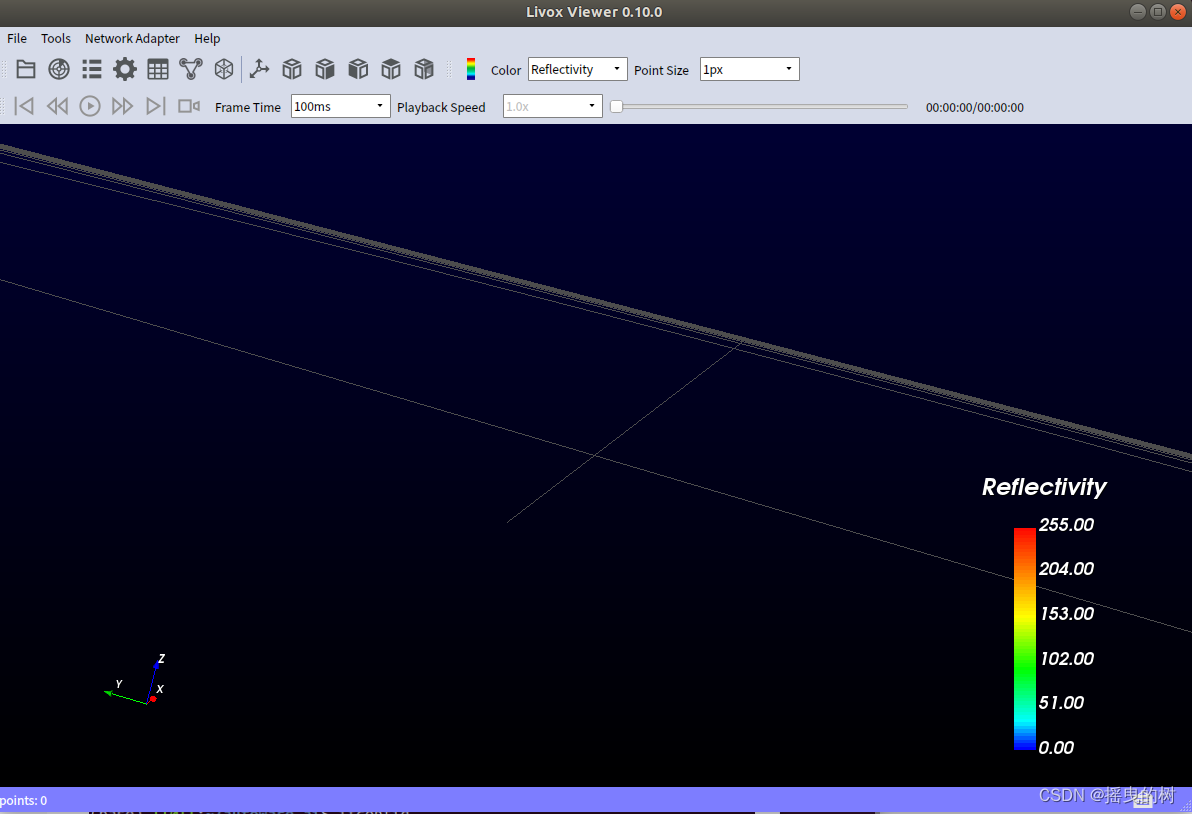
1.1 打开Livox Viewer程序
- 解压文件后,进入文件夹并运行启动指令如下:
./livox_viewer.sh
- 打开界面如下:
1.2 设备ip链接
电脑设置静态IP
注意:在设电脑与Livox设备连接前,需要电脑的IP设置中设置一个静态IP
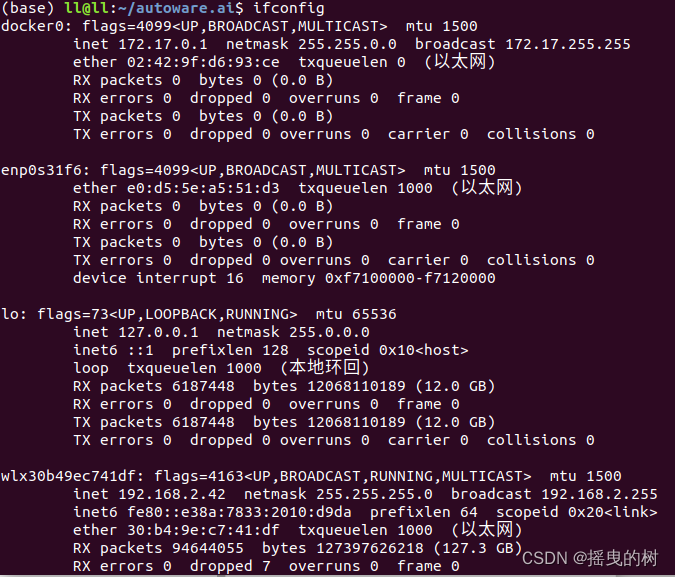
(1)找到物理网卡的名称,我这里是enp0s31f6
# 先ifconfig查看电脑的网卡信息,如下图
ifconfig
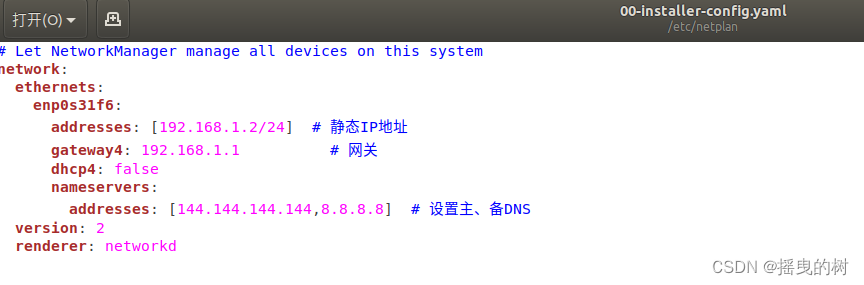
(2)实际需要依次设置enp0s31f6网卡的静态IP地址、网关、DNS,dhcp4设置为false,最后一行添加:renderer: networkd。
# 输入route -n命令,打印路由表,这里主要是为了查看网关地址,后续会用到
route -n
# 输入 sudo vim /etc/netplan/00-installer-config.yaml,编辑yaml文件
sudo gedit /etc/netplan/00-installer-config.yaml
- 根据Livox Viewer的用户手册要求:电脑的静态IP地址为192.168.1.2,子网掩码为255.255.255.0,默认网关为192.168.1.1

输入命令netplan apply使改动生效,然后reboot重启系统
sudo netplan apply
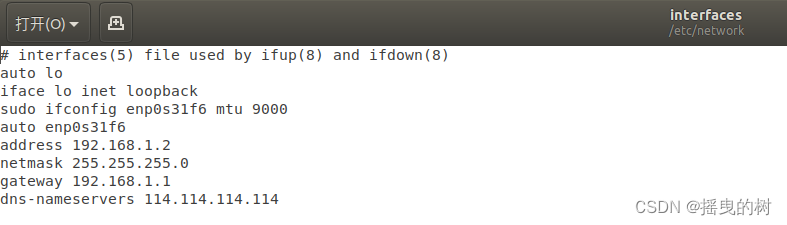
或者修改/etc/network/interfaces来设置静态ip
sudo gedit /etc/network/interfaces
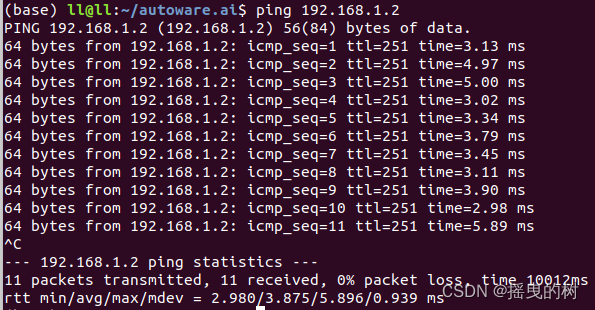
测试网络连通性
ping 192.168.1.2
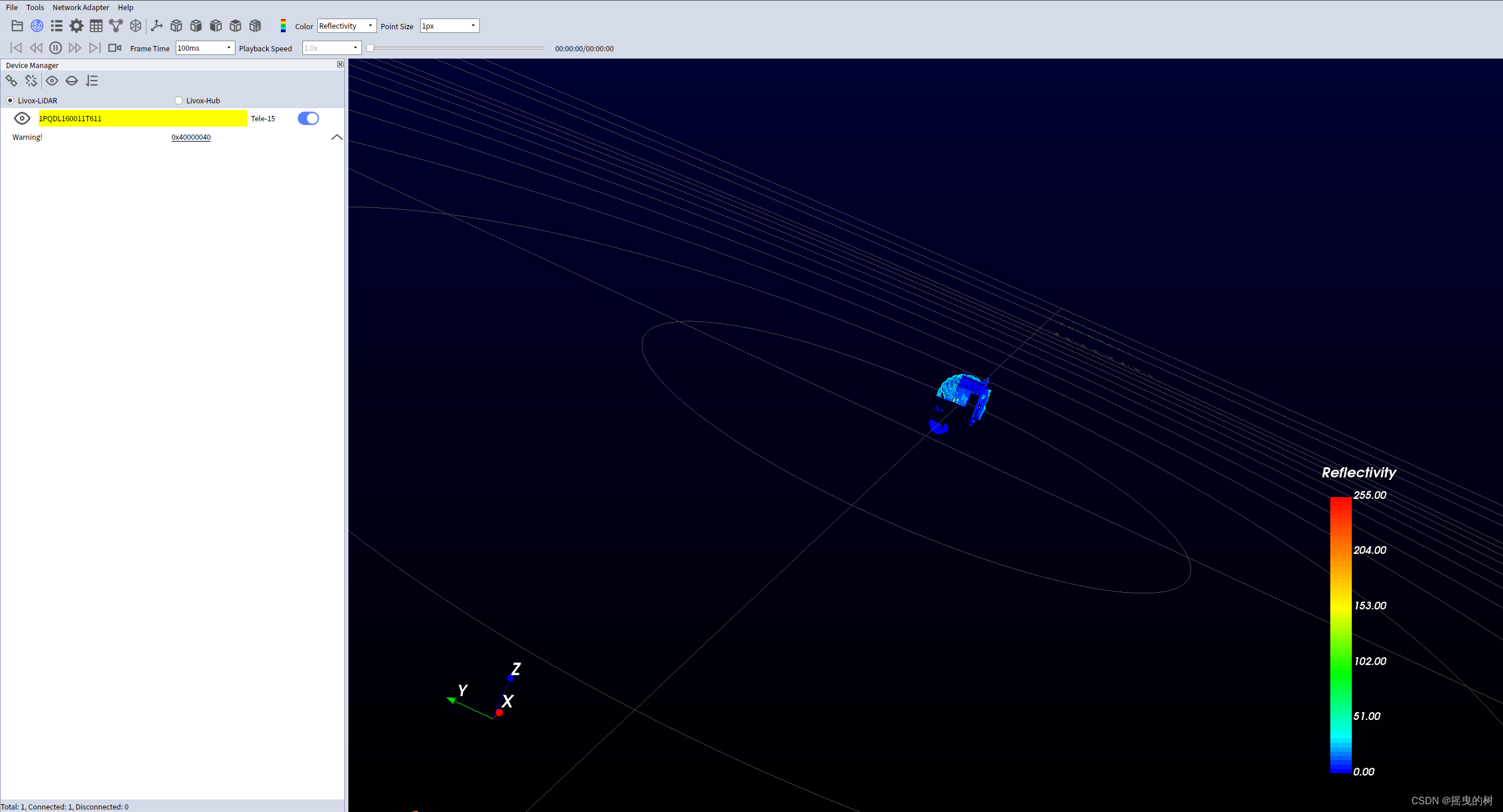
连接Livox Tele-15设备
设置好电脑静态IP后就可以连接设备采集实时点云流,如图所示:
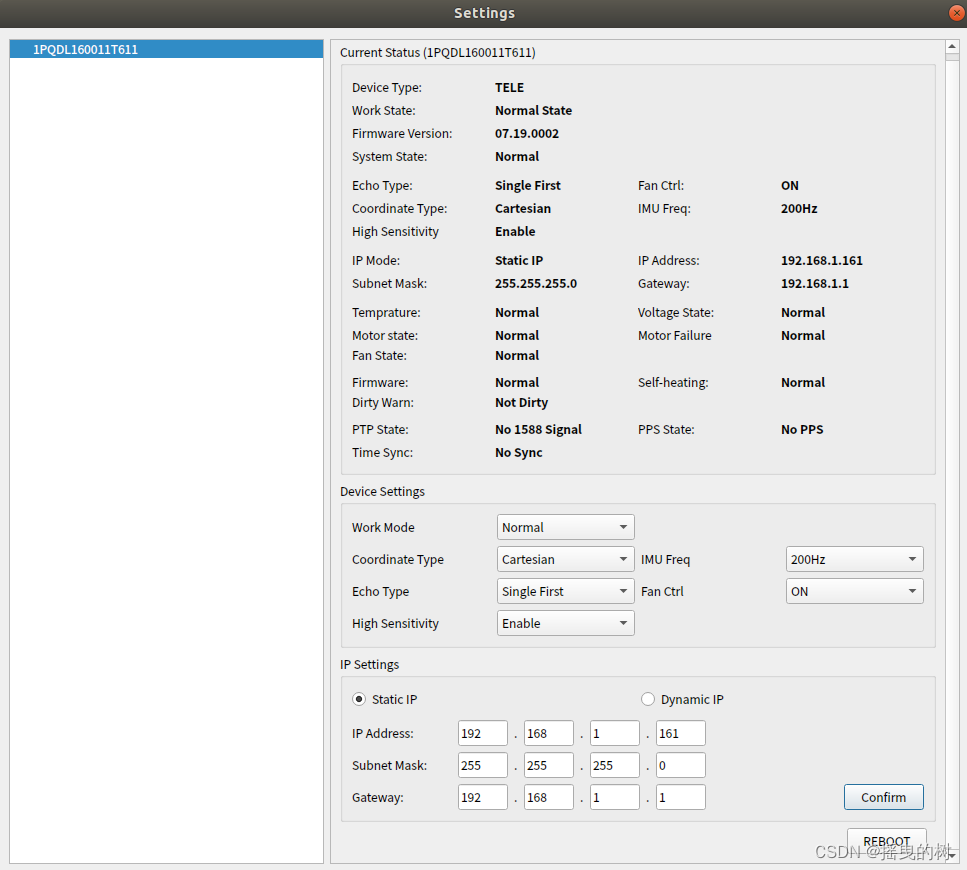
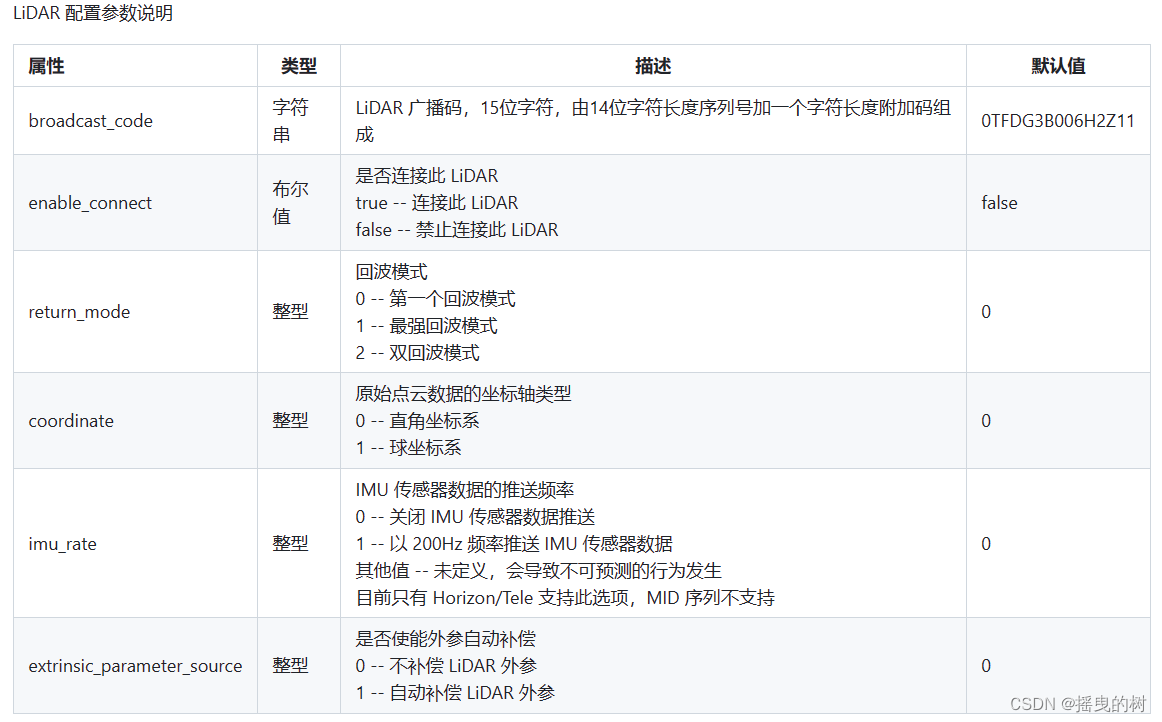
配置设备参数
连接Livox设备后,单击控制面板打开设置。可以检查所选设备的状态并设置参数
2 览沃Livox SDK二次开发并封装ROS
2.1 览沃Livox SDK安装
参考链接:Livox-SDK
编译 Livox SDK
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
make
sudo make install
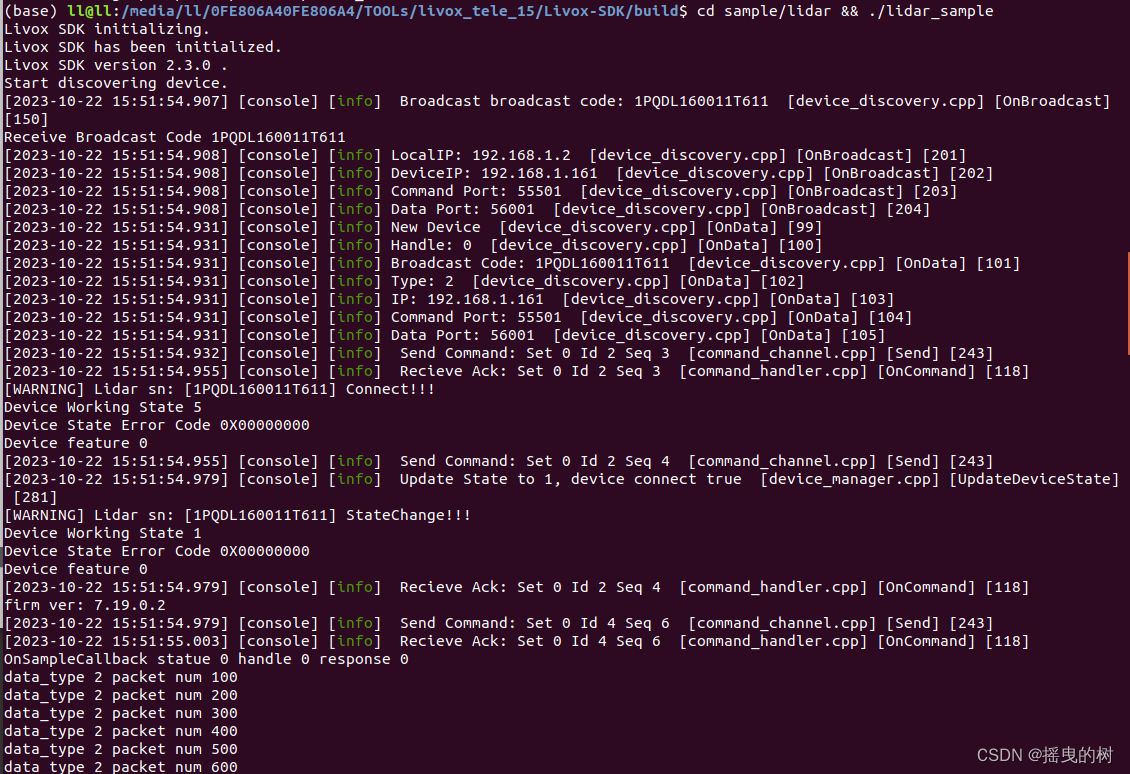
运行 Livox SDK 样例
cd sample/lidar && ./lidar_sample
2.2 览沃Livox livox_ros_driver 安装
Livox ROS Driver(览沃ROS驱动程序中文说明)
获取ROS驱动包
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
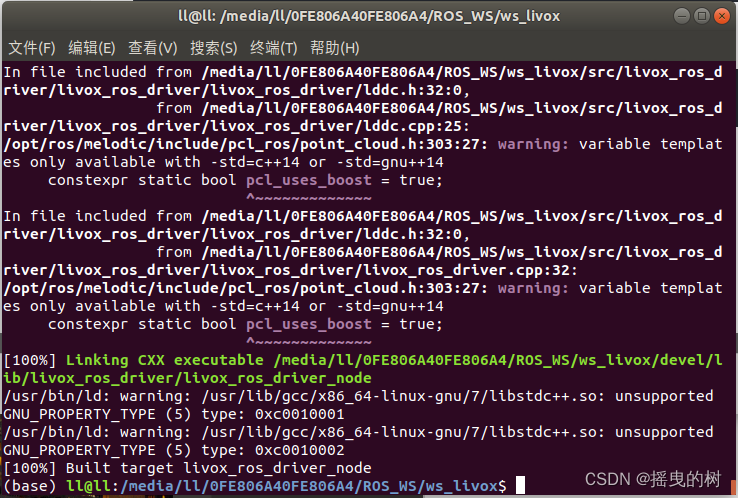
构建ROS驱动程序
cd ws_livox
catkin_make
更新ROS包环境
source ./devel/setup.sh
运行ROS驱动程序
roslaunch livox_ros_driver [launch file] [param]
- 如果
[param]参数项为空,则览沃 ROS 驱动程序会根据配置文件中的具体配置来连接对应的设备,具体连接规则如下:
当配置文件中指定的设备连接状态配置为使能连接时 (true) ,览沃 ROS 驱动程序只会连接该配置文件中指定的设备;
说明:
(1)该配置文件位于 “ws_livox/src/livox_ros_driver/config” 目录下;
(2)当配置文件中指定的设备连接状态全部配置为禁止连接 (false) 时,览沃 ROS 驱动程序会自动连接扫描到的所有设备;
2.3 Launch 配置文件描述
- 览沃驱动程序中所有的 launch 文件都位于
"ws_livox/src/livox_ros_driver/launch"路径下,不同的 launch 文件拥有不同的配置参数值, 应用在不同的场景中:

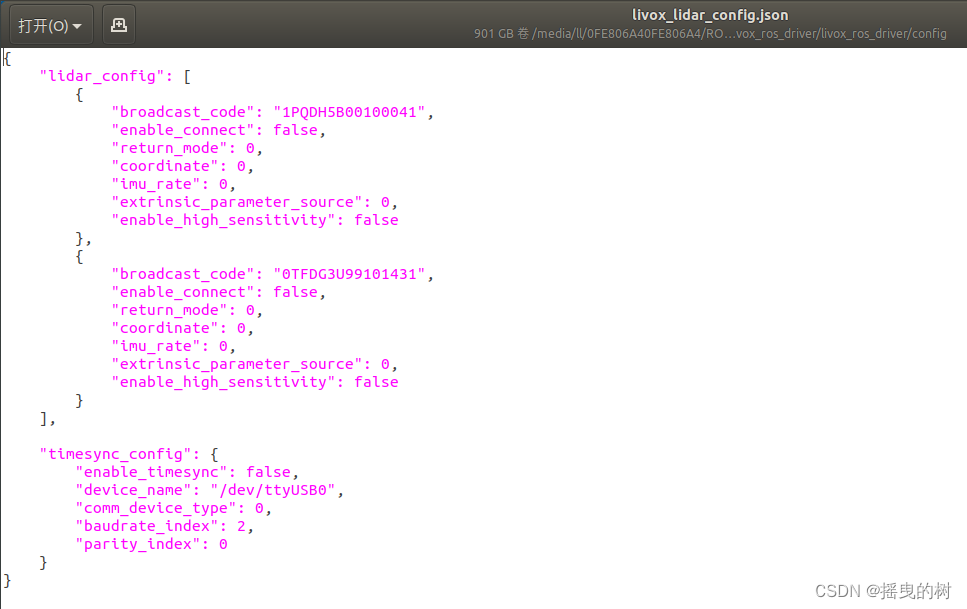
- 在
"ws_livox/src/livox_ros_driver/config"路径下, 有两个 json 配置文件,分别为
livox_hub_config.json和livox_lidar_config.json。
lvx 点云数据文件(v1.0/v1.1) 转换为 rosbag 文件
- 览沃 ROS 驱动程序支持 lvx 点云数据文件转换为 rosbag 文件,具体命令如下:
roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:="/home/livox/test.lvx"
- 替换如上命令中的
"/home/livox/test.lvx"为本地 lvx
数据文件路径后,直接运行即可;如果转换成功,将会在上述路径下产生同名 rosbag 格式点云数据文件。
3 保存lvx格式的数据文件
参考链接:How-to-use-lvx-file-under-ros-cn
3.1 使用览沃Viewer保存lvx文件
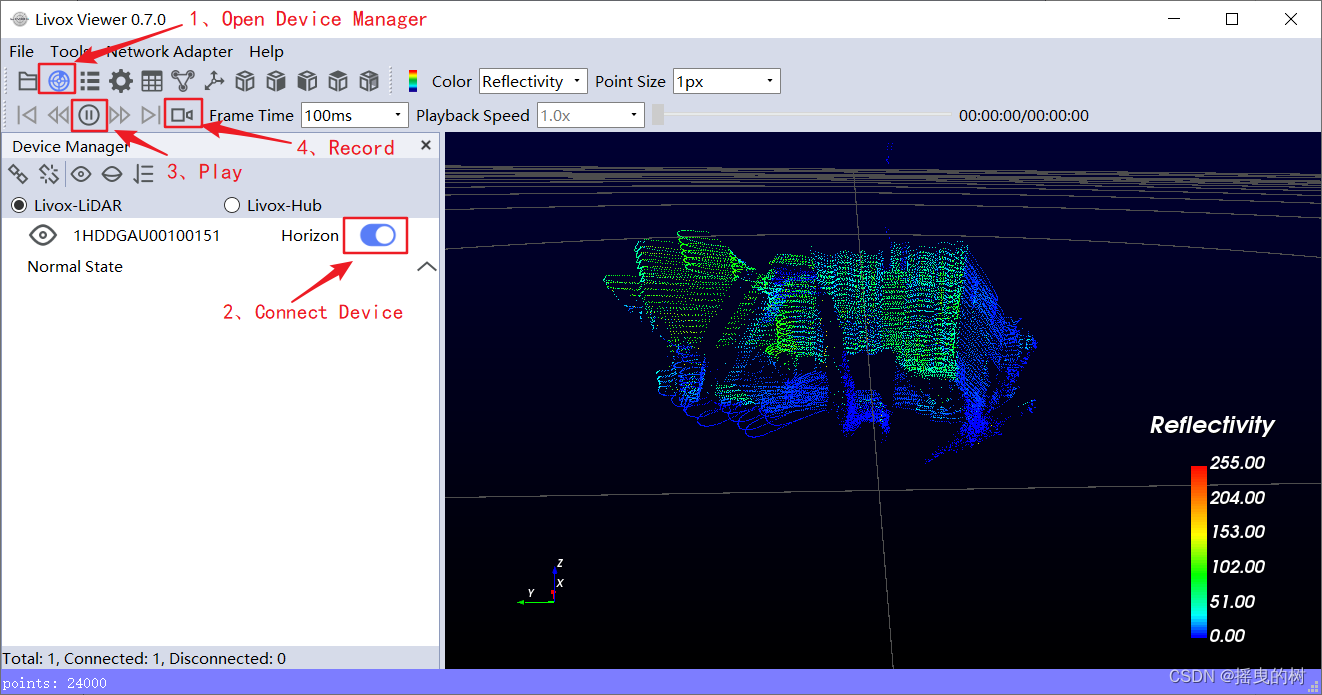
操作步骤如下所示:
打开设备管理器;
连接设备;
开始采样;
记录并保存lvx文件
./livox_viewer.sh
3.2 使用Livox-SDK保存lvx文件
Git clone Livox-SDK
git clone https://github.com/Livox-SDK/Livox-SDK.git
在以下文件路径打开终端窗口: …/Livox_SDK/build/sample/lidar_lvx_file
执行以下命令:./lidar_lvx_sample
连接指定的设备: -c “Lidar SN”
设置点云持续时间: -t 10 (10 second)
./lidar_lvx_sample -c “Lidar SN” -t 10
3.3 将lvx文件(v1.0/v1.1)转换为rosbag文件(仅支持Ubuntu系统)
Git clone livox_ros_driver
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
设置点云发布频率
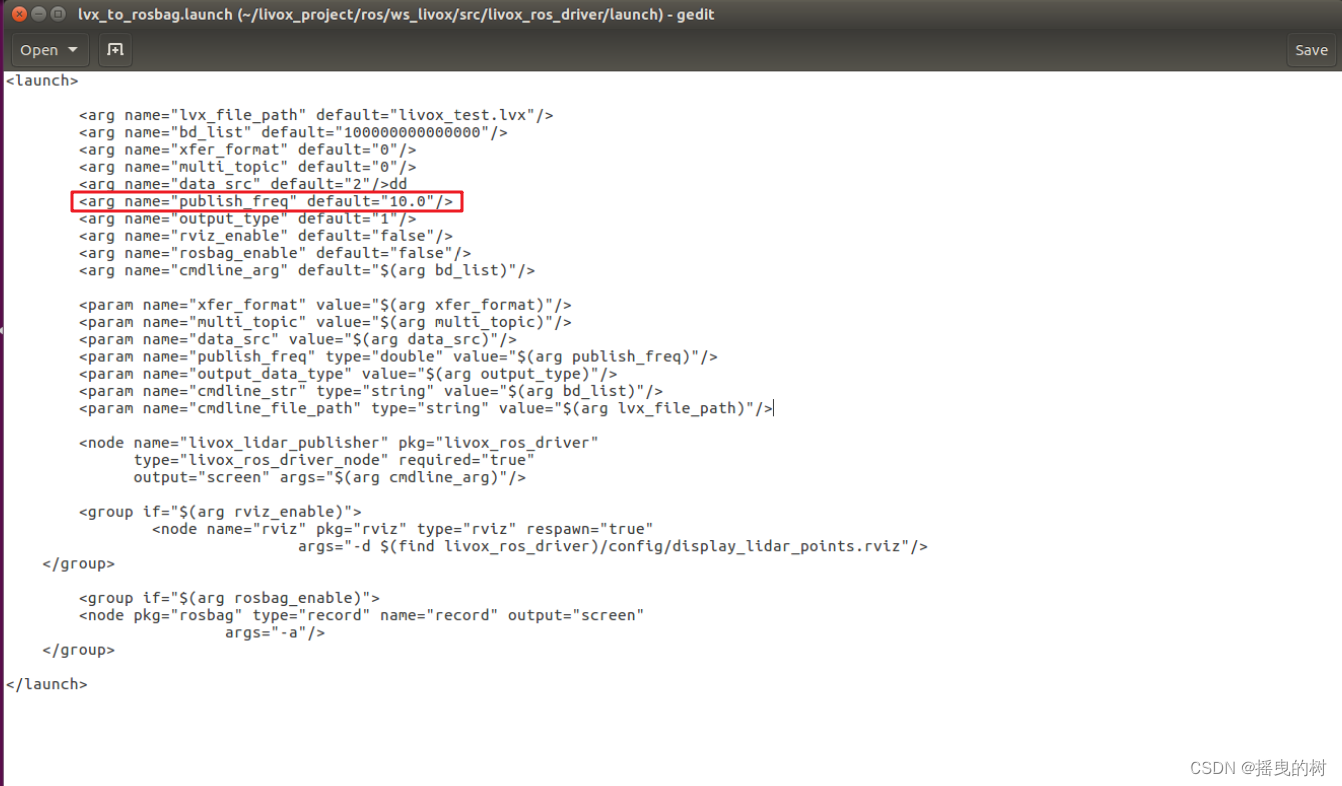
- 如果需要设置转换为rosbag数据的频率为10Hz,可以在
"../ws_livox/src/livox_ros_driver/launch/lvx_to_rosbag.launch file"文件中将‘publish_freq’参数设置为10.0。同理,可以将其设置成需要的频率。
在以下路径打开终端窗口
../ws_livox
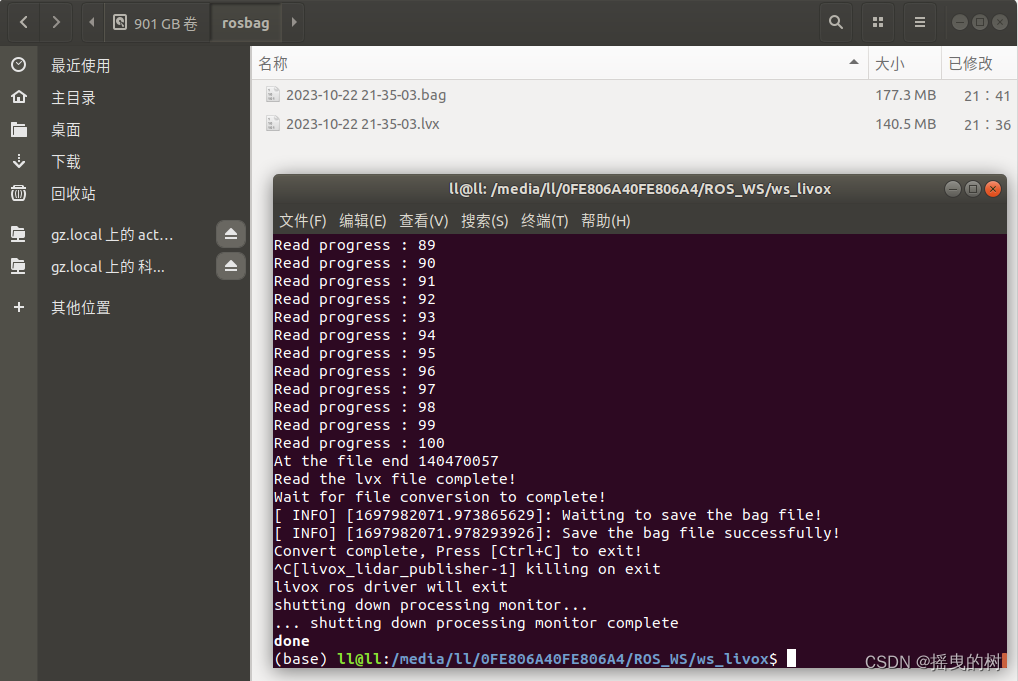
将lvx点云文件(v1.0/v1.1)转换为rosbag文件
- livox_ros_driver支持将lvx点云数据转换为rosbag文件。使用以下命令:
roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:="/home/livox/test.lvx"
- 将上述命令中
"/home/livox/test.lvx"替换为本地lvx文件的路径之后,即可以运行;如果转换成功,在上述路径下将会产生同名的rosbag格式的文件。
播放Rosbag数据
4 外参标定与点云显示
参考链接:外参标定与点云显示
- 览沃 ROS 驱动程序支持补偿 LiDAR 外参,在补偿外参之前必须标定好 LiDAR 外参。
4.1 使用 Livox Viewer 标定外参
外参标定
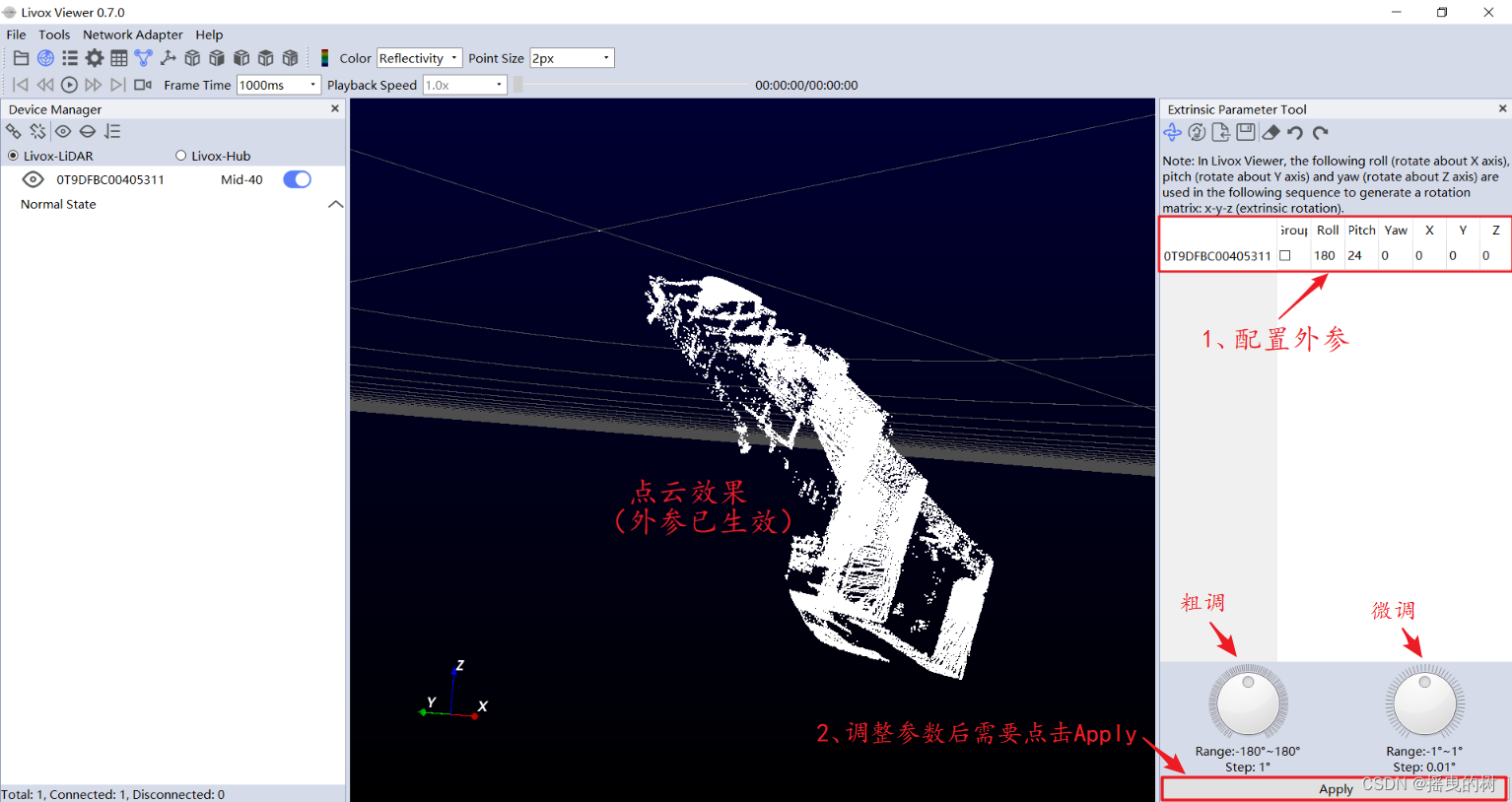
- 使用 Livox Viewer 标定外参的方法如下图 :
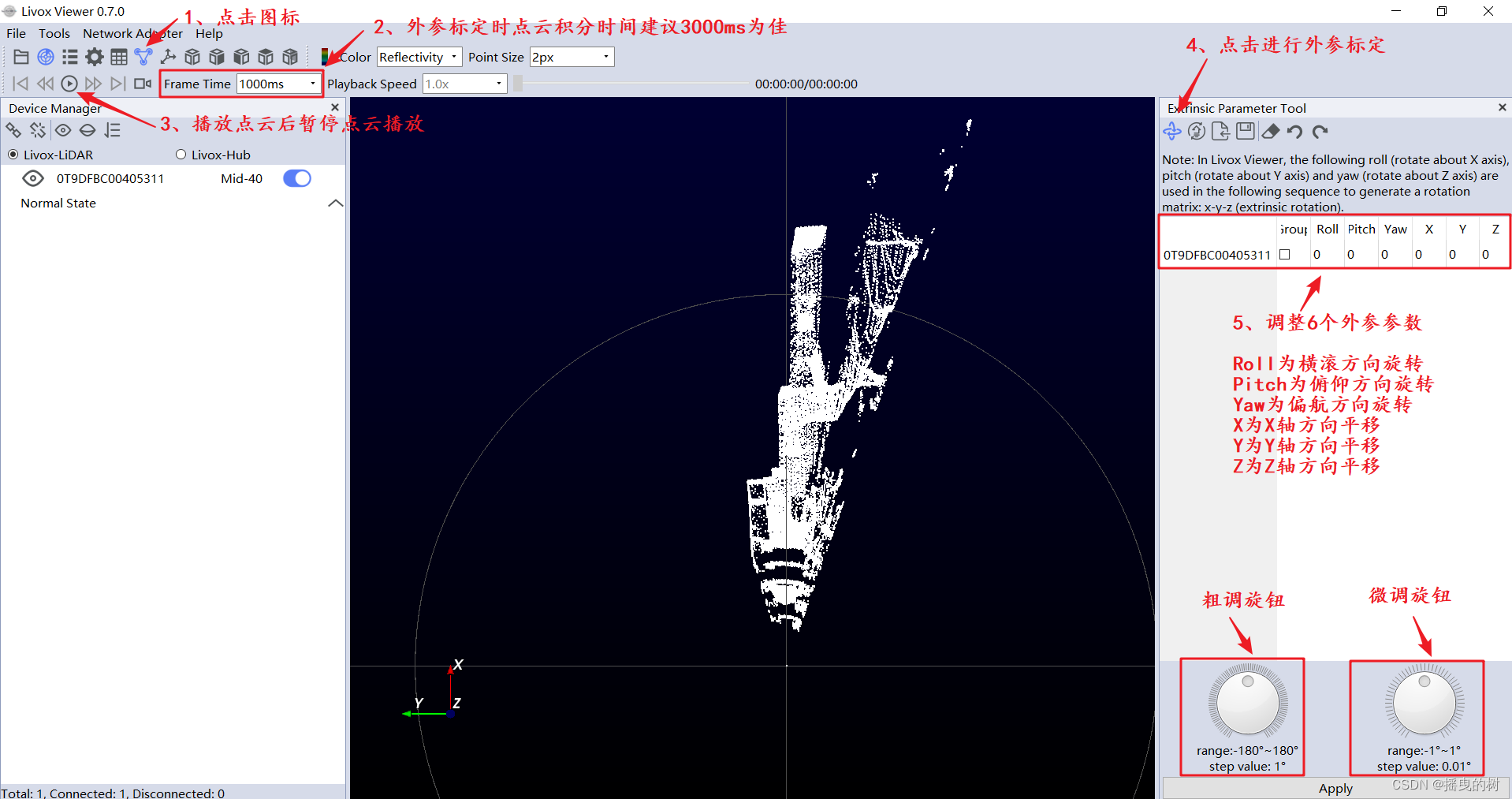
- 设置与写入雷达外参数值
注意事项 :
(1)在空旷环境下,准备标定物(标定板、标定支架……);
(2)寻找雷达之间的共同 FOV 方向的同一目标物;
(3)通过旋转一定角度,平移一定距离,使得目标物重叠;
(4)完成外参标定;
(5)如果没有共同 FOV ,则只能根据每个雷达之间的空间关系进行外参调整;
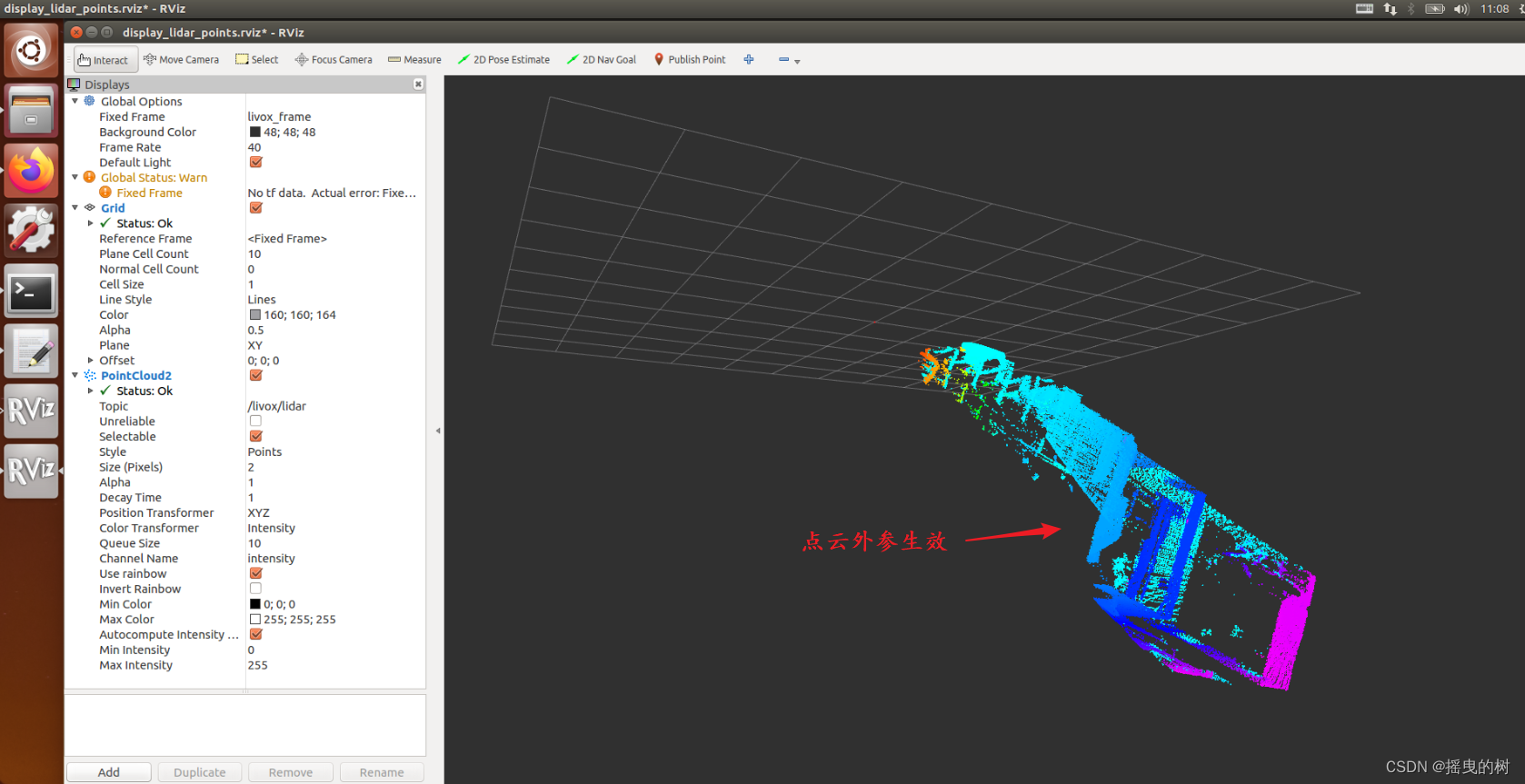
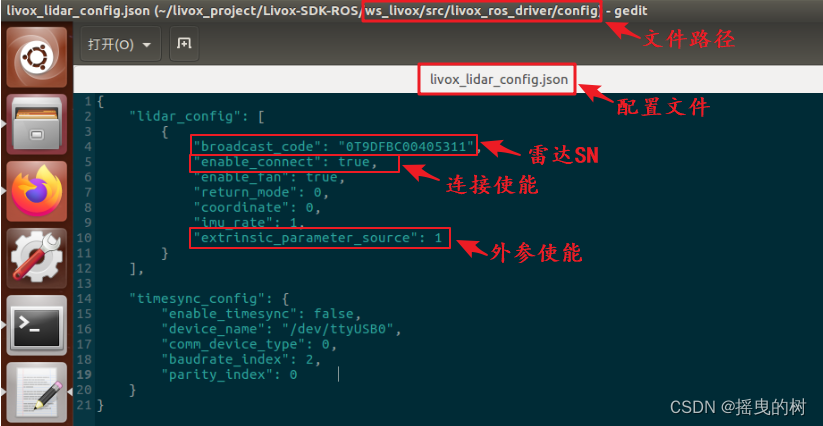
4.2 在Livox Ros Driver 中修改 config 配置表
进入以下文件路径:
"../ws_livox/src/livox_ros_driver/config",打开livox_lidar_config.json文件,如果只有一台设备,则只根据以下步骤修改对应的信息,如果有多台Livox雷达设备,则在 lidar_config 增加雷达的配置信息,再打开 Rviz 点云显示界面即可正常显示;
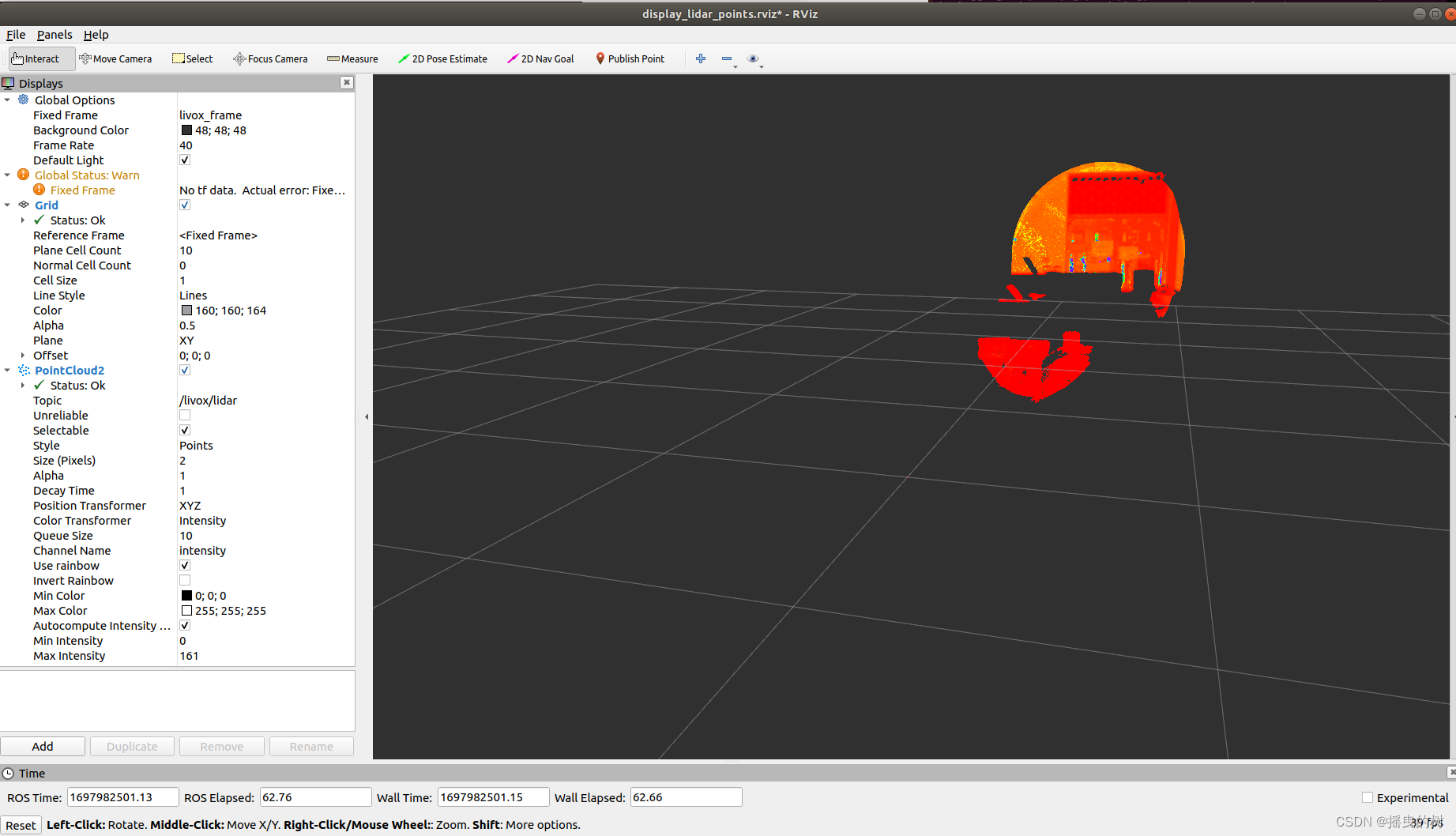
打开Rviz显示点云效果
- 在
"../ws_livox"文件路径下打开终端,执行以下语句连接当前局域网设备:
roslaunch livox_ros_driver livox_lidar_rviz.launch