目录
1 Dijkstra算法
2 Dijkstra算法的步骤
3 Dijkstra算法python实现
4 Dijkstra算法应用示例详解
1 Dijkstra算法
Dijkstra算法(迪杰斯特拉算法)是一种用于在加权图中查找从一个起始节点到所有其他节点的最短路径的算法。该算法最初由荷兰计算机科学家Edsger W. Dijkstra于1956年提出。Dijkstra算法适用于带有非负权重的有向图或无向图。
特点和限制:
- Dijkstra算法仅适用于非负权重的图,因为它依赖于贪婪策略来选择当前最短路径。
- 它可以找到从起始节点到所有其他节点的最短路径,因此适用于单源最短路径问题。
- Dijkstra算法不会处理负权边,如果图中存在负权边,应该使用其他算法,如Bellman-Ford算法。
- 算法的时间复杂度取决于数据结构的选择,一般情况下是O(V^2)或O(Vlog(V)),其中V是节点数。如果使用优先队列来优化,时间复杂度可以减小到O(Elog(V)),其中E是边数。
Dijkstra算法在许多领域广泛应用,包括路线规划、网络路由、资源分配和许多其他需要找到最短路径的应用。
2 Dijkstra算法的步骤
创建一个空的最短路径字典,其中每个节点的距离设置为无穷大,起始节点的距离设置为0。
创建一个空的已访问节点集合。
从未访问的节点中选择距离起始节点最近的节点,标记为已访问。
对于已访问节点的所有邻居,计算通过已访问节点到达它们的距离,并更新最短路径字典。
重复步骤3和4,直到所有节点都被访问。
3 Dijkstra算法python实现
以下是Python中使用Dijkstra算法实现的示例代码,用于查找从起始节点到其他节点的最短路径:
import heapq
def dijkstra(graph, start):
# 创建一个距离字典,用于存储每个节点到起始节点的距离
distances = {node: float('inf') for node in graph}
distances[start] = 0
# 创建一个优先队列,以便选择下一个节点
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_node = heapq.heappop(priority_queue)
# 如果当前距离大于已知距离,跳过
if current_distance > distances[current_node]:
continue
# 遍历当前节点的邻居
for neighbor, weight in graph[current_node].items():
distance = current_distance + weight
# 如果发现更短的路径,更新距离字典和优先队列
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
# 创建一个示例图
graph = {
'A': {'B': 2, 'D': 1},
'B': {'A': 2, 'C': 3, 'E': 2},
'C': {},
'D': {'E': 1},
'E': {}
}
# 起始节点
start_node = 'A'
# 调用Dijkstra算法函数
shortest_distances = dijkstra(graph, start_node)
# 打印最短路径和距离
for node, distance in shortest_distances.items():
print(f'Shortest distance from {start_node} to {node} is {distance}')
运行:
这段代码定义了一个
dijkstra函数,用于执行Dijkstra算法。它接受一个图的表示和起始节点作为参数,并返回一个包含从起始节点到其他节点的最短路径的字典。然后,我们创建一个示例图,并使用Dijkstra算法找到从节点 A 到其他节点的最短路径。请注意,你可以根据你的需求更改示例图和起始节点,以便应用Dijkstra算法到你的具体问题中。
4 Dijkstra算法应用示例详解
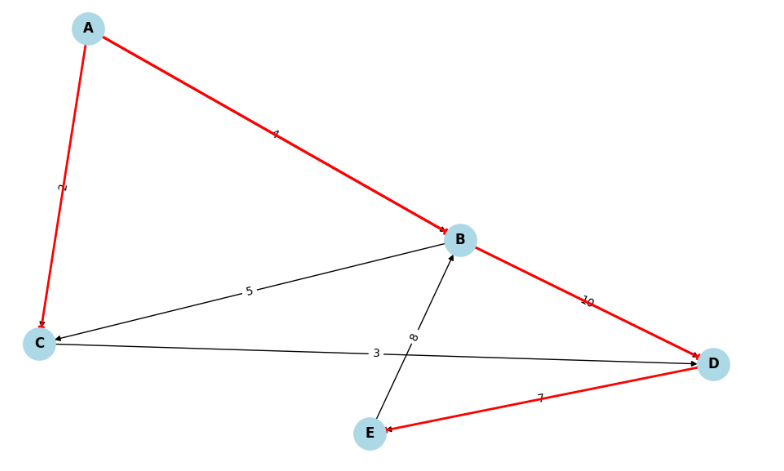
假设我们有以下有向图:
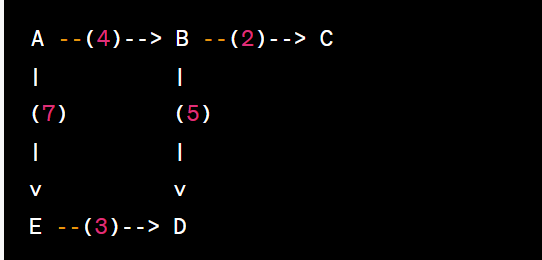
在这个示意图中,有向图包括节点 A、B、C、D 和 E,以及它们之间的带权重的边。边的数字表示权重或距离。我们的目标是找到从节点 A 到其他节点的最短路径。
Dijkstra算法的执行步骤:
初始化:开始时,我们选择节点 A 作为起始节点,并将其距离设置为 0。同时,将其他节点的距离初始化为无穷大,表示尚未知道到达它们的最短路径。
选择下一个节点:首先,我们选择节点 A 作为当前节点。它是起始节点,距离已知。
更新距离:我们计算从节点 A 到其邻居节点 B 和 C 的距离,并将这些距离记录下来。当前已知的最短距离是从 A 到 B 的距离为 4,从 A 到 C 的距离为 2。
选择下一个节点:现在,我们选择距离最短的节点 C 作为当前节点。
更新距离:我们计算从 A 经过 C 到达其邻居节点 B 和 D 的距离,并将这些距离记录下来。距离从 A 经过 C 到 B 的距离变为 4 + 5 = 9,从 A 经过 C 到 D 的距离变为 2 + 5 = 7。
选择下一个节点:然后,我们选择距离最短的节点 B 作为当前节点。
更新距离:我们计算从 A 经过 B 到达其邻居节点 D 的距离,并将这个距离记录下来。距离从 A 经过 B 到 D 的距离变为 4 + 5 + 3 = 12。
选择下一个节点:最后,我们选择距离最短的节点 D 作为当前节点。
更新距离:我们计算从 A 经过 D 到达其邻居节点 E 的距离,并将这个距离记录下来。距离从 A 经过 D 到 E 的距离变为 4 + 5 + 3 + 7 = 19。
完成:所有节点都已被访问,算法结束。
以上最短路径从节点 A 到其他节点的距离如下:
- A到A是 0
- A到B是 9
- A到C是 2
- A到D是 12
- A到E是 19
这个示意图展示了Dijkstra算法是如何逐步找到最短路径,并在每一步中选择距离最短的节点。算法的关键思想是贪婪地选择当前最短路径,以逐步构建最短路径树。
以下是Python代码示例,演示如何使用Dijkstra算法找到从节点 A 到其他节点的最短路径:
import networkx as nx
import matplotlib.pyplot as plt
# 创建一个有向图
G = nx.DiGraph()
# 添加节点
nodes = ['A', 'B', 'C', 'D', 'E']
G.add_nodes_from(nodes)
# 添加边和权重
edges = [('A', 'B', 4), ('A', 'C', 2), ('B', 'C', 5), ('B', 'D', 10), ('C', 'D', 3), ('D', 'E', 7), ('E', 'B', 8)]
G.add_weighted_edges_from(edges)
# 定义起点
start_node = 'A'
# 运行Dijkstra算法
shortest_paths = nx.single_source_dijkstra(G, source=start_node)
# 提取最短路径信息
shortest_distances, shortest_path_predecessors = shortest_paths
# 修正labels的格式
labels = {(edge[0], edge[1]): edge[2] for edge in G.edges(data='weight')}
# 可视化图
pos = nx.spring_layout(G, seed=42) # 布局算法,使图看起来更美观
plt.figure(figsize=(10, 6))
nx.draw(G, pos, with_labels=True, node_size=800, node_color='lightblue', font_size=12, font_weight='bold')
nx.draw_networkx_edge_labels(G, pos, edge_labels=labels, font_size=10)
# 绘制最短路径
for node in nodes:
if node != start_node:
path = nx.shortest_path(G, source=start_node, target=node)
path_edges = [(path[i], path[i + 1]) for i in range(len(path) - 1)]
nx.draw_networkx_edges(G, pos, edgelist=path_edges, edge_color='red', width=2)
plt.title("Dijkstra Algorithm - Shortest Paths")
plt.show()
# 打印最短路径和距离
for node, distance in shortest_distances.items():
if node != start_node:
path = nx.shortest_path(G, source=start_node, target=node)
print(f"Shortest path from {start_node} to {node}: {path}, Distance: {distance}")