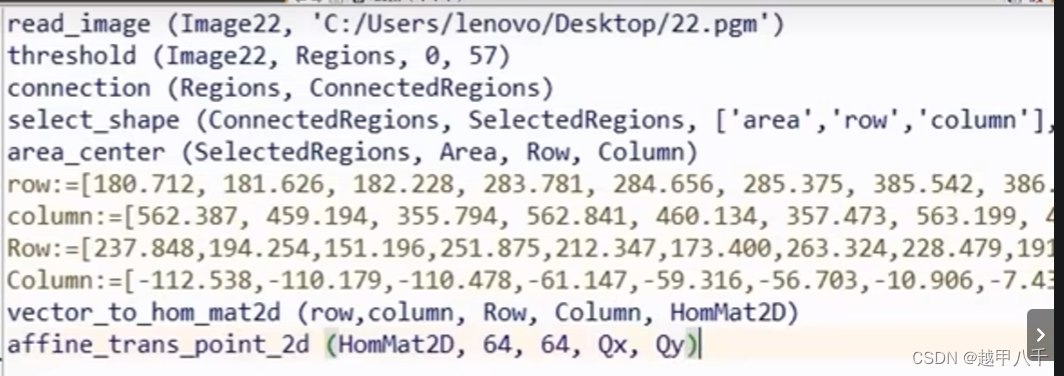
Halcon手眼标定
news2026/2/13 7:40:26

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1115077.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

如何用记事本制作一个简陋的小网页(3)——注册信息表
目录
前提须知:
一、表格建立之前:
二、表格的建立:
三、信息表的内容填充: 1.昵称 和 电话 :
2.密码:
3.性别:
4. 爱好:
5.民族:
6. 出生日期:
7.…

Python用selenium实现自动登录和下单的项目实战
本文主要介绍了Python用selenium实现自动登录和下单的项目实战,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧−
前言
学python对selenium应该不陌生吧
Selenium…

什么是低代码开发平台?有什么优势?
目录 一、低代码平台演进 1. 低代码概念 2. 低代码衍生历程 二、为什么要用低代码? (1)降本提效,便捷开发 (2)降低开发门槛,扩大应用开发劳动力 (3)加快数字化转型建设 三…

“第四十五天” 数据结构基本概念
目前看的有关数据结构的课,估计这周就看完了,但感觉差很多,还是和c一样,这样过一下吧。但可能比较急,目前是打算争取寒假回家之前把四大件都先大致过一遍。
数据结构里面有很多新的定义和概念,学到现在&am…

054协同过滤算法的电影推荐系统
大家好✌!我是CZ淡陌。一名专注以理论为基础实战为主的技术博主,将再这里为大家分享优质的实战项目,本人在Java毕业设计领域有多年的经验,陆续会更新更多优质的Java实战项目,希望你能有所收获,少走一些弯路…

vue el-dialog弹出框自定义指令实现拖拽改变位置-宽度-高度
前言 在实际开发中我们经常使用el-dialog弹出框做表单,一般情况都是居中。遮挡到了一部分数据 当我们想要查看弹出框下面的数据时,就只能先把弹出框关闭,查看完数据之后在打开弹框 我们通过动态样式,和鼠标事件就可以实现。但自…

OpenLDAP LDIF详解
手把手一步步搭建LDAP服务器并加域 有必要理解的概念LDAPWindows Active Directory 服务器配置安装 OpenLDAP自定义安装修改对象(用户和分组等)修改olcSuffix 和 olcRootDN 属性增加olcRootPW 属性修改olcAccess属性验证新属性值 添加对象(用…
Neo4j入门教程2(看不懂评论区随便骂)
1. ORDER BY
create (s4:student{age:21,num:98}),(s5:student{age:22,num:86}),(s6:student{age:23,num:99})承接上文,创建三个学生节点,标签为student1、student2、student3,分别拥有age属性和num属性
match(s:student) return s查看我们…
驱动day2:LED灯实现三盏灯的亮灭
head.h
#ifndef __HEAD_H__
#define __HEAD_H__
#define PHY_PE_MODER 0x50006000
#define PHY_PF_MODER 0x50007000
#define PHY_PE_ODR 0x50006014
#define PHY_PF_ODR 0x50007014
#define PHY_RCC 0x50000A28#endif
应用程序
#include <stdio.h>
#include <sys/…

【C语言必知必会 | 第二篇】编译器的安装与使用
引言 C语言是一门面向过程的、抽象化的通用程序设计语言,广泛应用于底层开发。它在编程语言中具有举足轻重的地位。 此文为【C语言必知必会】系列第二篇,介绍C语言编译器的安装与使用,为之后的学习安装环境基础 文章目录 1️⃣ Dev-C的安装与…
【2024秋招】用友项目管理部门java后端二面2023.9.12
1 rpc框架
1.1 深入讲讲你做的这个rpc框架
答:
1.2 你这个注册中心有实现相关的监控吗
1.2.1 如何实现注册中心有实现相关的监控
是的,我可以为你提供关于RPC注册中心及其监控的相关信息。RPC注册中心是用于管理微服务之间调用关系的中心化服务&…

基于材料生成优化的BP神经网络(分类应用) - 附代码
基于材料生成优化的BP神经网络(分类应用) - 附代码 文章目录 基于材料生成优化的BP神经网络(分类应用) - 附代码1.鸢尾花iris数据介绍2.数据集整理3.材料生成优化BP神经网络3.1 BP神经网络参数设置3.2 材料生成算法应用 4.测试结果…
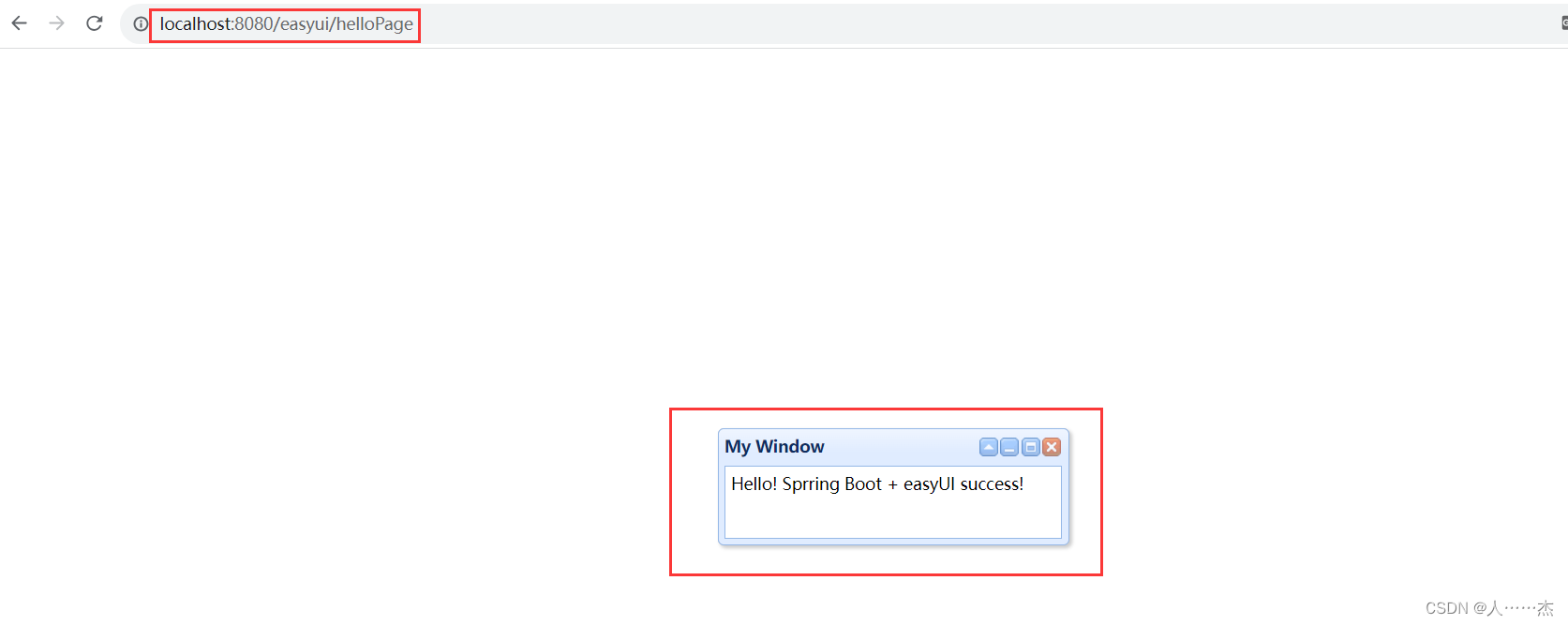
Spring Boot + EasyUI 创建第一个项目(一)
创建一个Spring Boot和EasyUI相结合的项目。
一、构建一个Spring Boot项目
Spring Boot之创建一个Spring Boot项目(一)-CSDN博客
二、配置Thymeleaf
Spring Boot Thymeleaf(十一)_thymeleaf 设置字体_人……杰的博客-CSDN博客…
轴承寿命相关细节的研究
数据集PHM2012
介绍一下IEEE PHM2012数据集_phm2012轴承数据集-CSDN博客
标签如何设置的?
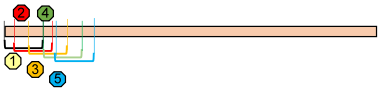
剩余寿命预测的标签设置_rul 标签_兔子牙丫丫的博客-CSDN博客 参考自刘硕师兄的毕业答辩PPT 图 4.9 训练数据的切分方法
数据段的重叠切分,不仅可以覆盖更多的标签数据…

YZ系列工具:YZ11:VBA_窗体缩放
我给VBA下的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。我的教程一共九套一部VBA手册,教程分为初级、中级、高级三大部分。是对VBA的系统讲解,从简单的…

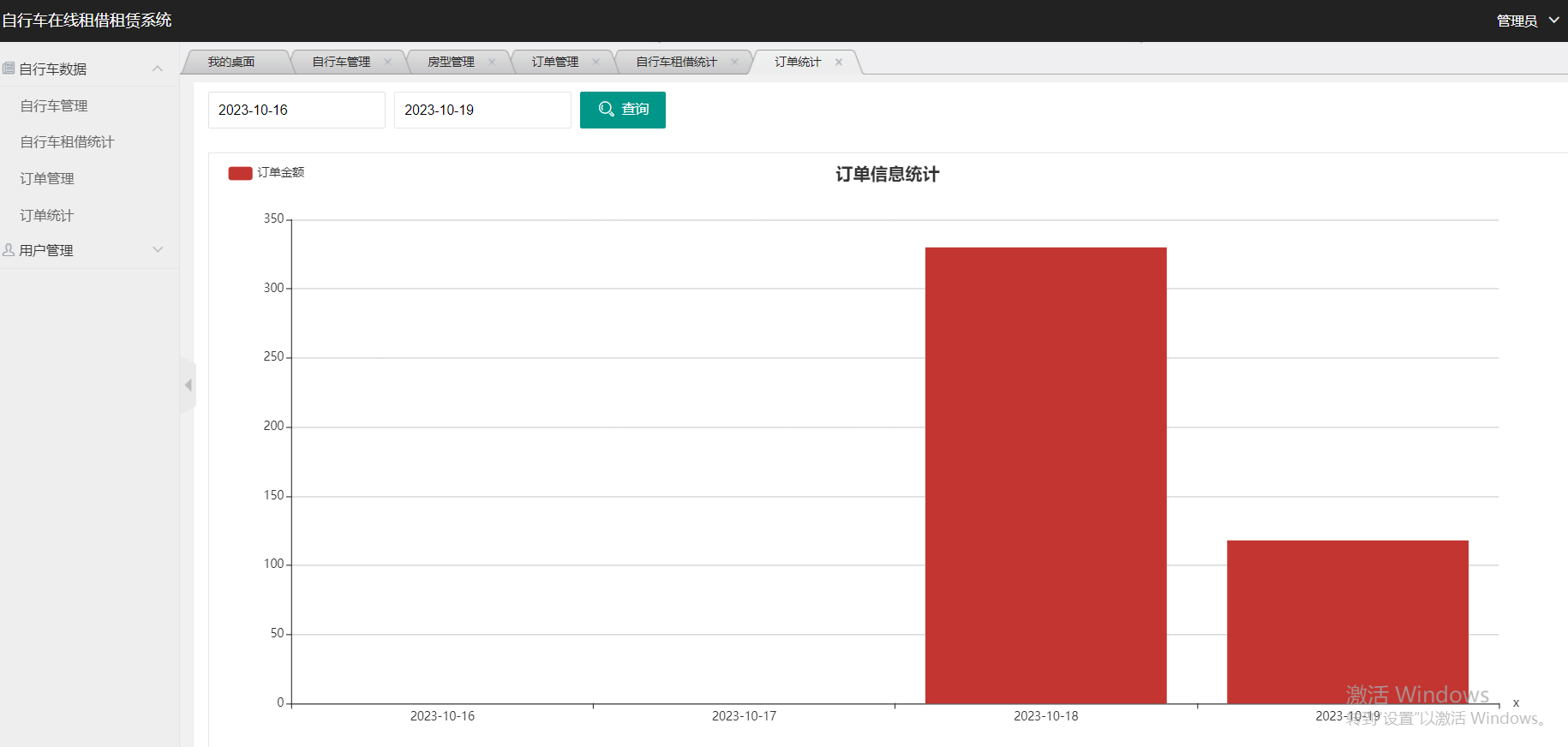
Android自行车在线租借租赁系统+全套手把手视频教程
【项目功能介绍】
功能列表: 本系统包含后台管理和前端app双端系统, 本系统包含三个角色: 管理员,员工,app用户。
后台管理员的功能包含: 登录, 退出, 自新车管理,添加自新车,修改自新车,禁用启用自新车; 自新车车辆管理,添加自新车车辆,修改自新车车辆,启用禁用自新车车辆; …