无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。是一种不需要人操控就能够自主飞行的飞行器,它可以执行多种任务,包括侦察、监测、航拍、搜救等。

无人机的工作原理主要包括飞行控制和数据传输两个方面。
飞行控制:飞行控制是指通过电子设备来控制无人机的飞行。无人机的电子设备能够感知周围环境的信息,并根据预设的程序来控制飞行器的运动。
数据传输:无人机的数据传输主要包括无线数据传输和储存数据传输两种方式。无线数据传输是指无人机通过无线通信设备将采集到的数据传输到地面控制中心或其他设备中。储存数据传输则是指无人机将采集到的数据存储在内部储存设备中,等待后续处理或传输。
无人机的数据传输主要包括图像传输、遥感数据传输、控制数据传输等。图像传输是指无人机通过摄像头采集图像并将其传输到地面控制中心或其他设备中。遥感数据传输是指无人机通过遥感设备采集地面的数据并将其传输到地面控制中心或其他设备中。控制数据传输则是指无人机将采集到的飞行数据和控制指令传输到地面控制中心或其他设备中。
无人机操作流程:
开始界面:快捷实现任务的规划,进入任务监控界面,实现航拍任务的快速自动归档,各功能划分开来,实现软件运行的专一而稳定。
航前检查:为保证任务的安全进行,起飞前结合飞行控制软件进行自动检测,确保飞机的GPS、罗盘、空速管及其俯仰翻滚等状态良好,避免在航拍中危险情况的发生。
飞行任务规划:在区域空照、导航、混合三种模式下进行飞行任务的规划。
航飞监控:实时掌握飞机的姿态、方位、空速、位置、电池电压、即时风速风向、任务时间等重要状态,便于操作人员实时判断任务的可执行性,进一步保证任务的安全。
影像拼接:航拍任务完成后,导航航拍影像进行研究区域的影像拼接。
2.4GHz无线技术具有较长的无线传输距离和稳定的连接性能,因此在一些对传输稳定性要求较高的场景中得到了广泛应用。
无线收发芯片一般采用射频(RF)技术实现具有收发性能优良,周边电路简单,省电,可靠性高的优点;内含无线收发模块和微处理器模块;目前许多应用领域都采用无线的方式进行数据传输,但由于无线收发芯片的种类和数量比较多,无线收发芯片的选择在设计中尤为重要。
无人机遥控中应用的2.4GHz无线芯片
news2026/2/13 11:47:47
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1114055.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Windows Defender防火墙配置错误与GPO:梳理关键点
许多企业在网络中拥有不同的组成部分,包括Windows Defender防火墙、GPO和AD基础设施。网络中的任何部分都可能存在漏洞,这些漏洞可能引发多米诺效应。一旦第一个多米诺出现问题,整个链条都会受到牵连,可能会对您的网络造成无法挽回…
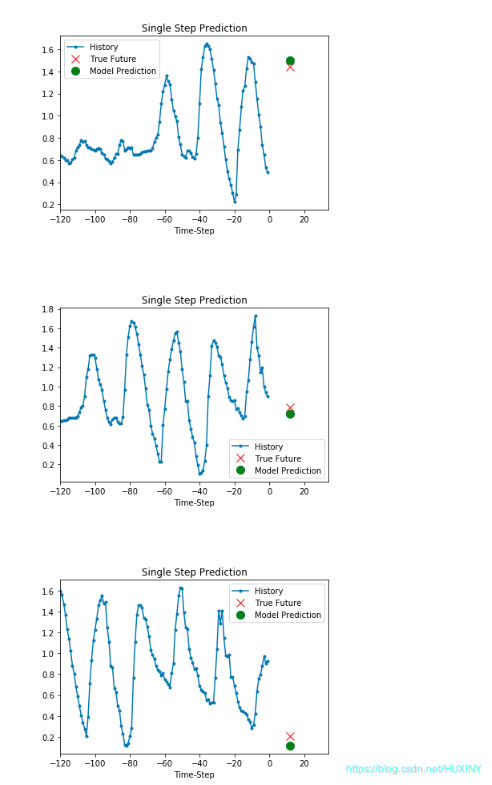
基于LSTM的天气预测 - 时间序列预测 计算机竞赛
0 前言
🔥 优质竞赛项目系列,今天要分享的是
机器学习大数据分析项目
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/po…
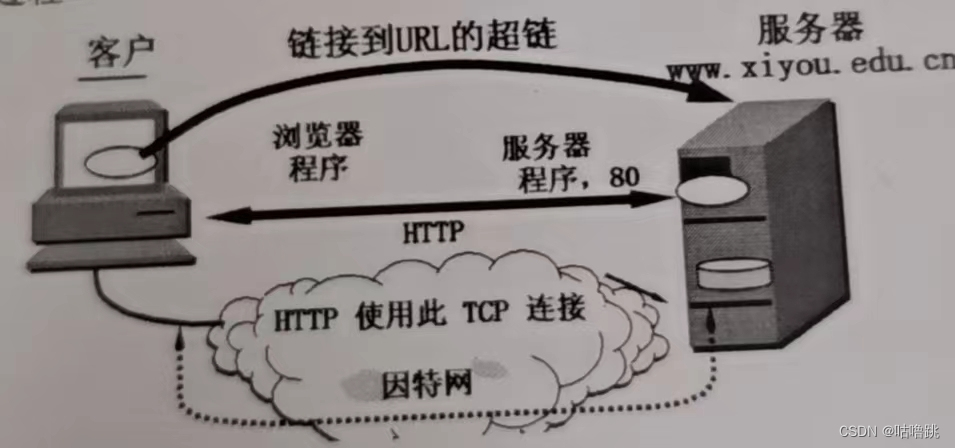
数据通信——应用层(超文本)
一,引言 所谓万维网,简单来说就是咱们经常能看见的HTTP,万维网就是基于应用层的HTTP协议出现的。伴随HTTP协议的主要一点就是超文本的概念。 二,超文本的概念
超文本按照非线性结构,将文档中的相关内容的不同部分通过…

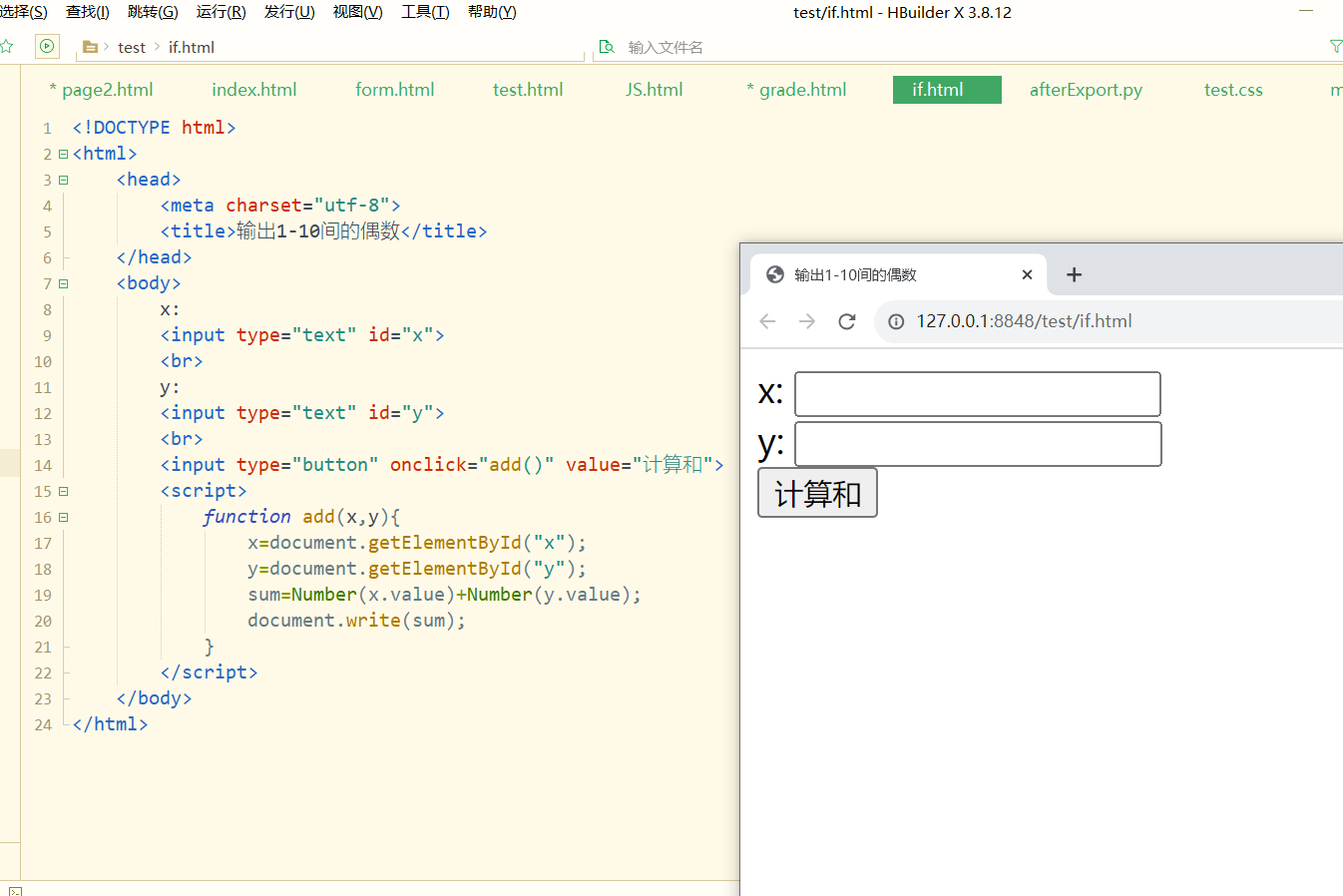
Javascript 函数 笔记/练习
函数 function 又称方法 (method)
自定义函数
是一段预定义好的并且可以反复使用的代码块
定义
<script>function print_name(){document.write("name")}
</script>函数调用 直接调用 单独开辟一块内存空间,私有,其中定义的变…
QT读取Excel表格内容到Table Widget
QT读取Excel表格内容到Table Widget_qt导入excel-CSDN博客有一个需求是要把Excel的数据导入到QT的Table Widget表格中。我是一个QT新手,在网上找了很多方法,在这里汇总记录一下。目前总共有四种方法:其中方法适用于不加密的Excel文件…
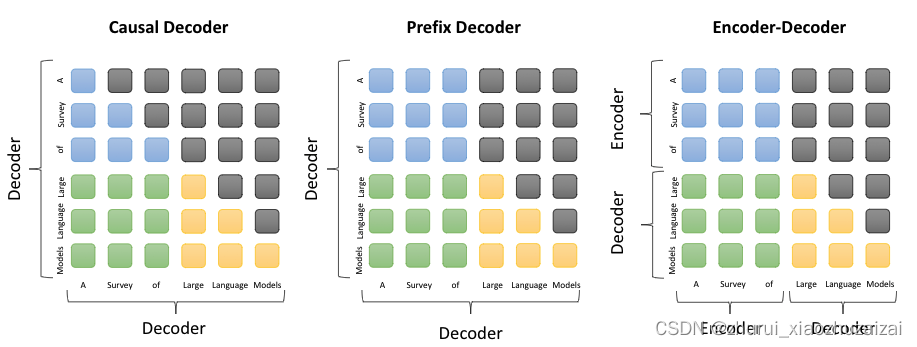
大模型LLM相关面试题整理
0 一些基础术语 大模型:一般指1亿以上参数的模型,但是这个标准一直在升级,目前万亿参数以上的模型也有了。大语言模型(Large Language Model,LLM)是针对语言的大模型。175B、60B、540B等:这些一…

元梦之星内测上线,如何在B站打响声量?
元梦之星是腾讯天美工作室群研发的超开星乐园派对手游,于2023年1月17日通过审批。该游戏风格可爱软萌,带有社交属性,又是一款开黑聚会的手游,备受年轻人关注。
飞瓜数据(B站版)显示,元梦之星在…

(热门推荐)天津web前端培训班 Web前端学习顺序
互联网行业的热门职业之一的Web前端开发,一直备受大家关注,随着技术的不断进步和互联网的快速发展,2023年对于Web前端来说,前景可谓一片光明。
Web前端发展前景
伴随着人工智能、物联网、5G的发展,各大门户网站、APP…
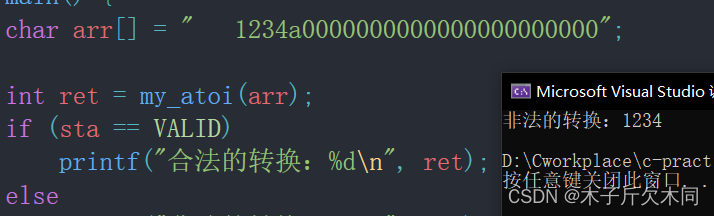
了解C语言中的atoi函数和模拟实现
目录 1. atoi函数
1.1 函数的声明
1.2 函数的作用
1.3 函数的使用
2. 模拟实现atoi函数
2.1 整理思路
2.2 整份代码 1. atoi函数
1.1 函数的声明
int atoi (const char * str);
1.2 函数的作用 将字符串转化为int类型的数据。转化string字符串里面的涉及到可以转化…
如何用U盘重装系统Win10专业版
我们每天办公都会用到电脑,如果电脑系统出现崩溃或中病毒了,那是非常影响自己的工作效率。如果您的系统出现问题了,可以考虑重装系统,轻松快速解决系统问题。接下来小编给大家介绍利用U盘重装Win10系统专业版的简单步骤࿰…

KT142C语音芯片,支持dac和直驱扬声器,dac没声音,怎么回事
KT142C的芯片,支持dac和直驱扬声器,dac没声音,怎么回事? 首先芯片是支持DAC和PWM输出直驱扬声器的,但是请注意,不是同时支持,只能二选一
》默认出厂的芯片是PWM直驱扬声器【芯片的13/14脚--部分…

推进控制系统阀组比例阀放大器
推进控制系统阀组是一种控制阀组,在盾构机推进系统中具有重要的作用。
推进控制系统阀组包括:阀块、比例减压阀、逻辑阀、电磁换向阀和油缸伸缩控制阀组。
比例减压阀安装在阀块的上表面,与逻辑阀并联;逻辑阀安装在阀块侧表面&a…


Spring Security静态资源过滤(11)
在一个实际项目中,并非所有的请求都需要经过Spring Security过滤器,有一些特殊的请求,例如静态资源等,一般来说并不需要经过Spring Security过滤器链,用户如果访问这些静态资源,直接返回对应的资源即可。
…

oracle11g安装图解
软件需求 1.安装CentOS6.5的服务器一台 2.Oracle 11g 安装介质: linux.x64_11gR2_database_1of2.zip linux.x64_11gR2_database_2of2.zip 3.命令行客户端工具xshell、crt或者putty 4.图形界面客户端工具Xming 系统配置检查 1.内存检查 grep MemTotal /proc/m…