B站链接
https://www.bilibili.com/video/BV13a4y1J7bw?p=1&vd_source=6f43d02eb274352809b90e8cdf744905
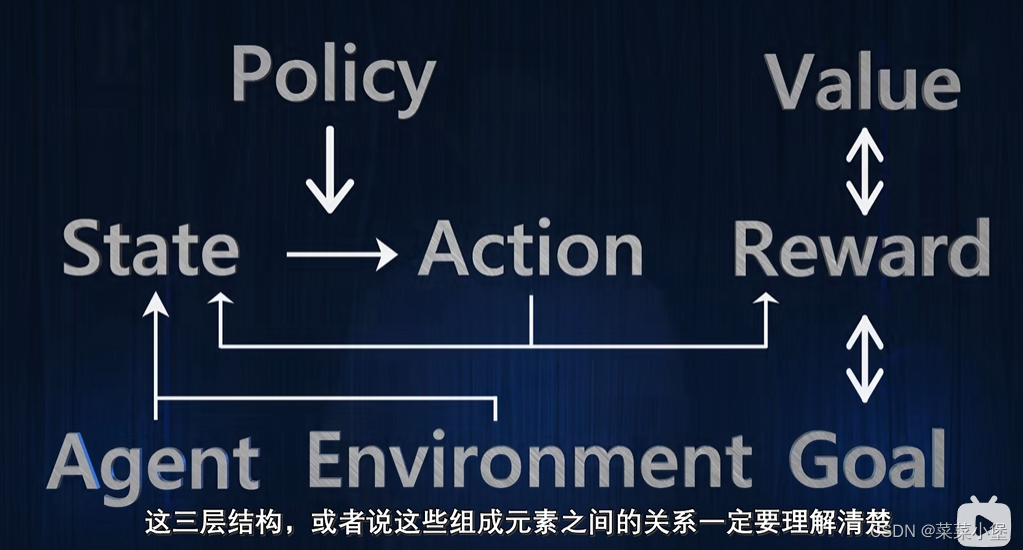
agent----------environment--------goal
State 状态
Action 行动
Reward奖励
是一个及时的反馈
目标是一个长远的结果
Core element👇
Policy 策略
当前需要决定的行动策略,policy依赖于value,可以理解为,policy输入的是state,输出是action
Value 价值
state-value函数
state-action-value函数
try_and_error delay_reward exploration exploitation
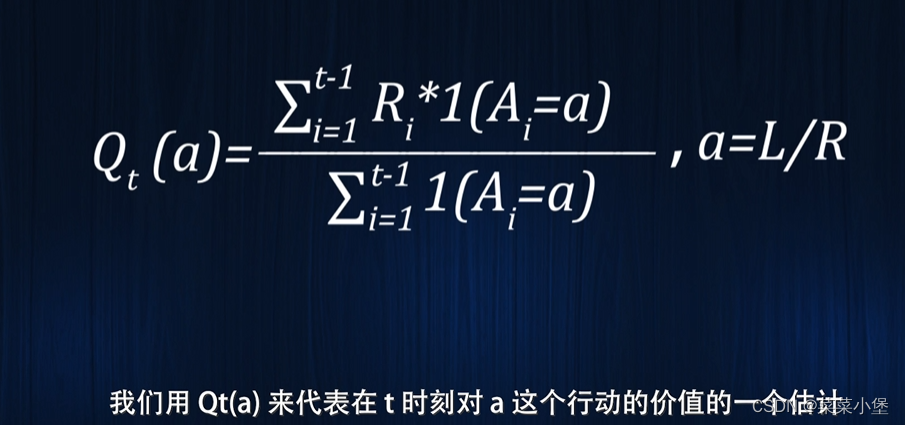
a = L(left)/R(right)
以上的Q可以理解是t时刻时进行行动a的价值函数。
选择action时,要选择在此刻t的Q(a_i)的最大值。

Q
n
+
1
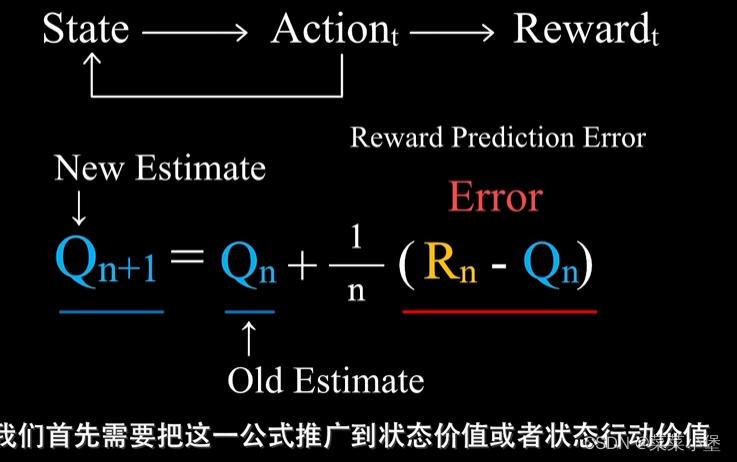
Q_n+1
Qn+1是第n+1次行动的估计价值,
R
n
R_n
Rn是第n次行动的真实价值。1/n为步长。适用于没有延迟奖励👆且只有一个状态的情况
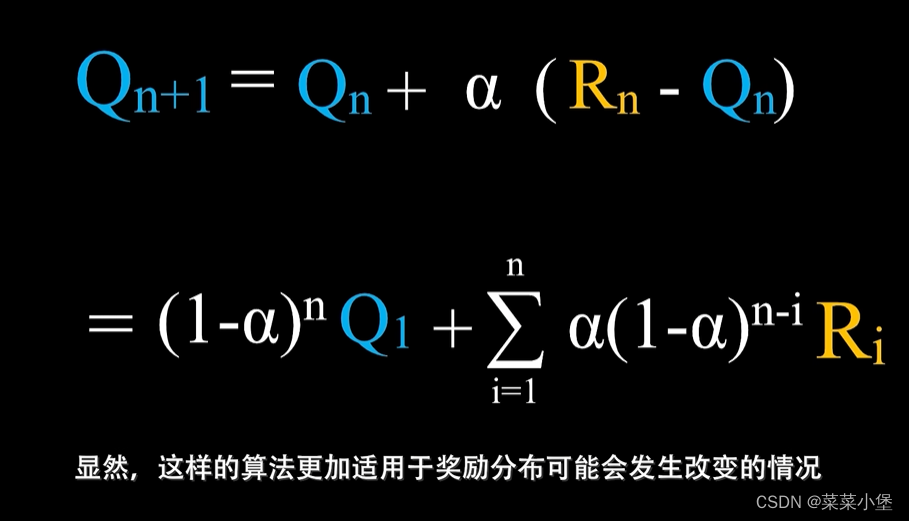
👆这个函数更受最近的action的影响,所以可能更适合奖励机制。
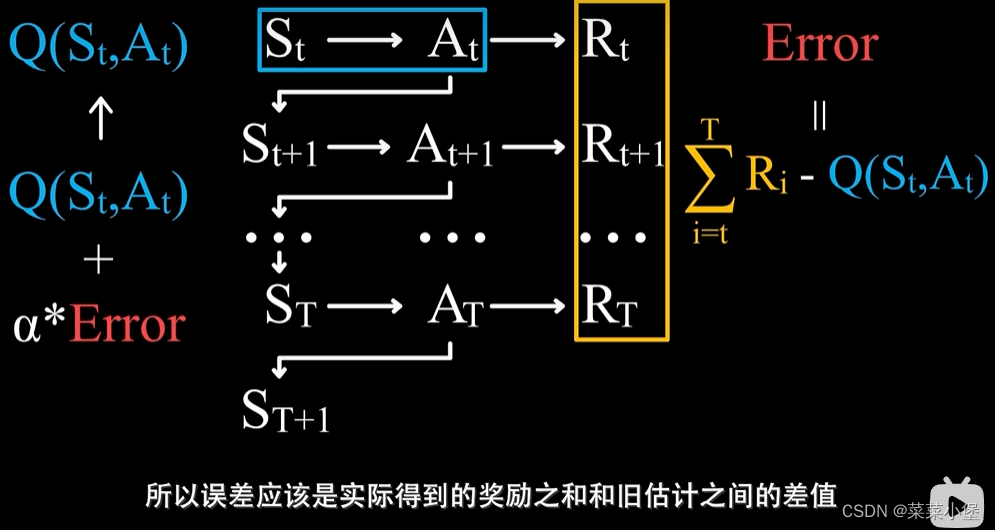
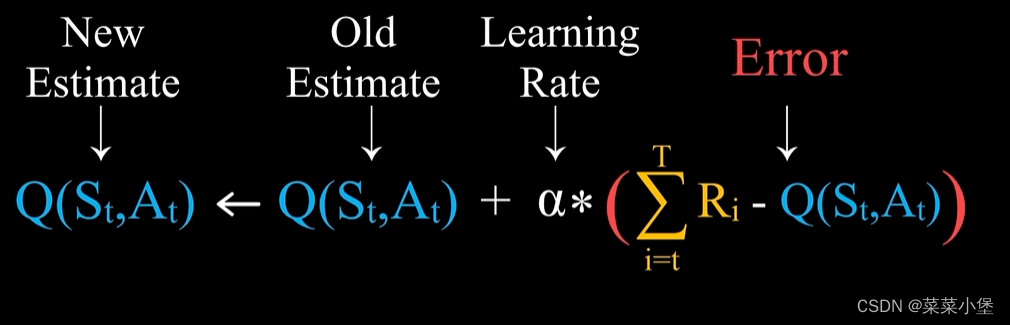
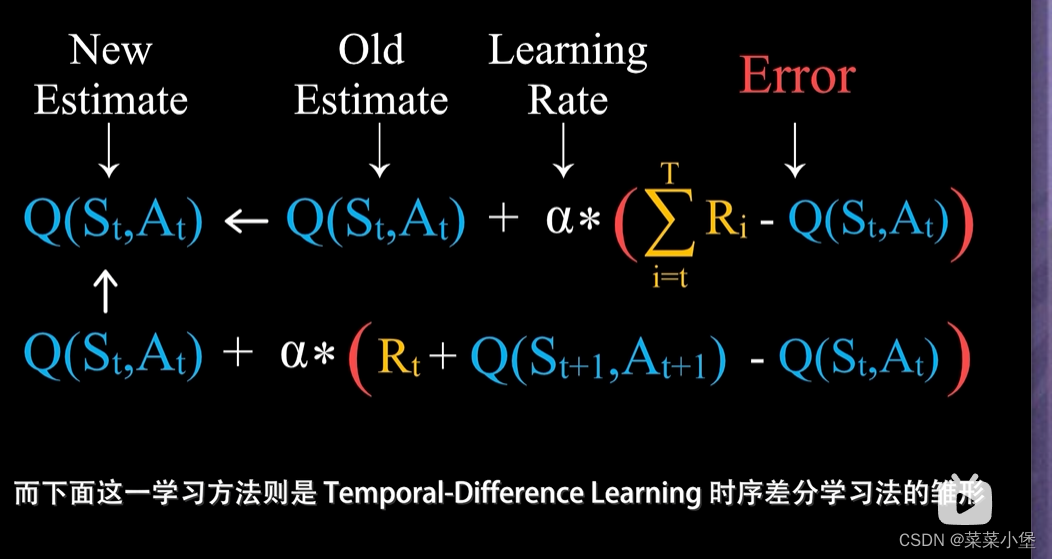
MC Method 和 Tempportal-Difference Learning分别类似于👇俩公式
MC method就是用随机性来模拟状态值。
Tempportal-Difference Learning。

![[Model.py 02] 地图按比例放大的实现](https://img-blog.csdnimg.cn/4f2f992e641941e4b47d5d83a0e993ec.png#pic_center)