目录
- 1. 什么是 NumPy?
- 2. NumPy 中的数组
- 2.1. 创建数组
- 2.2. 用Numpy的数据
- 2.2.1. OpenCV
- 2.2.2. Pandas
- 3. 数学计算
- 3.1. 四则计算
- 3.1.1. 矩阵乘法
- 3.1.2. 点乘
- 3.2. 求逆矩阵与伪逆矩阵
- 3.3. 判断矩阵相等
- 3.4. np.eye()函数生成对角阵
- 4. 统计
- 4.1. 最大值、最小值、均值+条件
- 4.2. numpy.ptp()最大值与最小值的差
- 5. 其他
- 5.1. 删除空值与布尔屏蔽
- 5.2. numpy 将uint8转换为int16
- 5.3. 沿轴向连接数组
- 5.4. 如何计算两组数的欧式距离
- 5.5. 如何计算numpy数组的移动平均值
1. 什么是 NumPy?
NumPy是一个功能强大的Python库,主要用于对多维数组执行计算。NumPy这个词来源于两个单词-- Numerical和Python。NumPy提供了大量的库函数和操作,可以帮助程序员轻松地进行数值计算。这类数值计算广泛用于以下任务:
-
机器学习模型:在编写机器学习算法时,需要对矩阵进行各种数值计算。例如矩阵乘法、换位、加法等。NumPy提供了一个非常好的库,用于简单(在编写代码方面)和快速(在速度方面)计算。NumPy数组用于存储训练数据和机器学习模型的参数。
-
图像处理和计算机图形学:计算机中的图像表示为多维数字数组。NumPy成为同样情况下最自然的选择。实际上,NumPy提供了一些优秀的库函数来快速处理图像。例如,镜像图像、按特定角度旋转图像等。
-
数学任务:NumPy对于执行各种数学任务非常有用,如数值积分、微分、内插、外推等。因此,当涉及到数学任务时,它形成了一种基于Python的MATLAB的快速替代。
2. NumPy 中的数组
NumPy提供的最重要的数据结构是一个称为NumPy数组的强大对象。NumPy数组是通常的Python数组的扩展。NumPy数组配备了大量的函数和运算符,可以帮助我们快速编写上面讨论过的各种类型计算的高性能代码。
NumPy围绕这些称为数组的事物展开。实际上它被称之为 ndarrays,使用NumPy提供的这些数组,我们就可以以闪电般的速度执行各种有用的操作,如矢量和矩阵、线性代数等数学运算!
矩阵类似于矢量,除了它由行和列组成; 很像一个网格。可以通过给出它所在的行和列来引用矩阵中的值。在NumPy中,我们通过传递一系列序列来制作数组,就像我们之前所做的那样。
2.1. 创建数组
import numpy as np
a = [[1,2],[10,30],[100,200]]
b = np.array(a)
print(b)
[[ 1 2]
[ 10 30]
[100 200]]
c = np.zeros((2,3))
array([[0., 0., 0.],
[0., 0., 0.]])
d = np.ones((2,3))
array([[1., 1., 1.],
[1., 1., 1.]])
2.2. 用Numpy的数据
2.2.1. OpenCV
import numpy as np
import cv2
img=cv2.imread('img\heart1.JPG')
h,w,l=img.shape
2.2.2. Pandas
import pandas as pd
df = pd.DataFrame(b,columns=['a','b'])
print(df)
df.values
a b
0 1 2
1 10 30
2 100 200
array([[ 1, 2],
[ 10, 30],
[100, 200]])
3. 数学计算
3.1. 四则计算
使用四则运算符 +、- 、*、/ 来完成运算操作。乘法运算符执行逐元素乘法而不是矩阵乘法。 要执行矩阵乘法,你可以执行以下操作。
3.1.1. 矩阵乘法
- 概念:矩阵乘法是指两个矩阵进行乘法运算的过程。
- 运算方法:若 A A A为 m × n m\times n m×n的矩阵, B B B为 n × p n\times p n×p的矩阵,则其乘积 C = A × B C=A\times B C=A×B为 m × p m\times p m×p的矩阵。其中, C C C的第 i i i行、第 j j j列元素的计算方法为 C i , j = ∑ k = 1 n A i , k × B k , j C_{i,j}=\sum_{k=1}^{n}A_{i,k}\times B_{k,j} Ci,j=∑k=1nAi,k×Bk,j。
- 特点:
- 矩阵乘法不满足交换律,即 A × B ≠ B × A A\times B\ne B\times A A×B=B×A。
- 矩阵乘法满足结合律,即 ( A × B ) × C = A × ( B × C ) (A\times B)\times C=A\times (B\times C) (A×B)×C=A×(B×C)。
- 矩阵乘法可以用于矩阵的变换。
A × B = [ A 11 A 12 A 21 A 22 A 31 A 32 ] × [ B 11 B 12 B 21 B 22 ] = [ A 11 B 11 + A 12 B 21 A 11 B 21 + A 12 B 22 A 21 B 11 + A 22 B 21 A 21 B 21 + A 22 B 22 A 31 B 11 + A 32 B 21 A 31 B 21 + A 32 B 22 ] A \times B=\begin{bmatrix} A_{11} & A_{12}\\ A_{21} & A_{22}\\ A_{31} & A_{32} \end{bmatrix} \times \begin{bmatrix} B_{11} & B_{12} \\ B_{21} & B_{22} \end{bmatrix} = \begin{bmatrix} A_{11}B_{11} + A_{12}B_{21} & A_{11}B_{21} + A_{12}B_{22}\\ A_{21}B_{11} + A_{22}B_{21} & A_{21}B_{21} + A_{22}B_{22}\\ A_{31}B_{11} + A_{32}B_{21} & A_{31}B_{21} + A_{32}B_{22} \end{bmatrix} A×B= A11A21A31A12A22A32 ×[B11B21B12B22]= A11B11+A12B21A21B11+A22B21A31B11+A32B21A11B21+A12B22A21B21+A22B22A31B21+A32B22
numpy的dot()函数称为点积。
3.1.2. 点乘
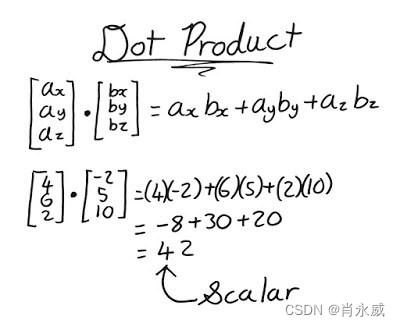
- 概念:点乘是指两个向量逐一对应的元素相乘,并将结果相加的过程。
- 运算方法:若 A = ( a 1 , a 2 , a 3 , … , a n ) A=(a_1,a_2,a_3,\dots,a_n) A=(a1,a2,a3,…,an), B = ( b 1 , b 2 , b 3 , … , b n ) B=(b_1,b_2,b_3,\dots,b_n) B=(b1,b2,b3,…,bn)为两个 n n n维向量,则其点乘 C = A ⋅ B C=A\cdot B C=A⋅B为一个标量,其计算方法为 C = ∑ i = 1 n a i × b i C=\sum_{i=1}^{n}a_i\times b_i C=∑i=1nai×bi。
- 特点:
- 点乘满足交换律,即 A ⋅ B = B ⋅ A A\cdot B=B\cdot A A⋅B=B⋅A。
- 点乘也称为内积,可以用于计算向量的模长和向量之间的夹角。
- 点乘也可以用于计算两个向量之间的相似度。
A × B = [ A 11 A 12 A 21 A 22 ] × [ B 11 B 12 B 21 B 22 ] = [ A 11 B 11 A 12 B 12 A 21 B 21 A 22 B 22 ] A \times B=\begin{bmatrix} A_{11} & A_{12}\\ A_{21} & A_{22} \end{bmatrix} \times \begin{bmatrix} B_{11} & B_{12} \\ B_{21} & B_{22} \end{bmatrix} = \begin{bmatrix} A_{11}B_{11} & A_{12}B_{12}\\ A_{21}B_{21} & A_{22}B_{22} \end{bmatrix} A×B=[A11A21A12A22]×[B11B21B12B22]=[A11B11A21B21A12B12A22B22]
例如:
import numpy as np
a = np.array([[1,2],[4,5]])
b = np.array([[1,2],[3,4]])
c = np.dot(a,b) # 矩阵乘法,点积
d = np.multiply(a,b) # 矩阵叉乘,点乘
e = a@b
f = a*b
print('c=e',c)
print('d=f',d)
c=e [[ 7 10]
[19 28]]
d=f [[ 1 4]
[12 20]]
3.2. 求逆矩阵与伪逆矩阵
逆矩阵概念:设 A A A是一个n阶矩阵,若存在另一个n阶矩阵 B B B,使得: A B = B A = E AB=BA=E AB=BA=E ,则称方阵 A A A可逆,并称方阵 B B B是 A A A的逆矩阵,不是所有的矩阵都存在逆矩阵的,但有时候不得不用到,举个例子:
A X = B AX=B AX=B,则: X = A − 1 B X=A^{-1}B X=A−1B
当 A A A可逆的时候完全没问题,但是当 A A A不可逆的时候只能用pinv求伪逆矩阵,照样能得到结果,但是存在一定的误差,不能忽略。
import numpy as np
a = np.array([[1, 0, 0],
[0, 6, 0],
[0, 0, 9]])
print('\n', np.linalg.inv(a)) # 求逆矩阵
print('\n', np.linalg.pinv(a)) # 求伪逆矩阵,当本身就可逆的时候,二者结果相同
b = np.array([[1, 4, 1, 5]])
print('\n', np.linalg.pinv(b))
print('\n', b @ np.linalg.pinv(b)) # 可以看到伪逆矩阵的性质还是使它们俩相乘为E
[[1. 0. 0. ]
[0. 0.16666667 0. ]
[0. 0. 0.11111111]]
[[1. 0. 0. ]
[0. 0.16666667 0. ]
[0. 0. 0.11111111]]
[[0.02325581]
[0.09302326]
[0.02325581]
[0.11627907]]
[[1.]]
3.3. 判断矩阵相等
numpy中的allclose函数用于比较两个数组是否相等。
例如逆矩阵运算,判断是否相等。
import numpy as np
a = np.array([[1., 2.], [3., 4.]])
ainv = np.linalg.inv(a)
np.allclose(np.dot(a, ainv), np.eye(2))
True
正常情况下,np.allclose会按照元素在数组中的顺序依次进行比较。例如:
import numpy as np
a = np.array([1, 2, 3])
b = np.array([1, 2, 3])
c = np.array([3, 2, 1])
print(np.allclose(a, b)) # True
print(np.allclose(a, c)) # False
3.4. np.eye()函数生成对角阵
函数的原型:numpy.eye(N,M=None,k=0,dtype=<class ‘float’>,order='C)
返回的是一个二维2的数组(N,M),对角线的地方为1,其余的地方为0.
参数介绍:
- N:int型,表示的是输出的行数
- M:int型,可选项,输出的列数,如果没有就默认为N
- k:int型,可选项,对角线的下标,默认为0表示的是主对角线,负数表示的是低对角,正数表示的是高对角。
- dtype:数据的类型,可选项,返回的数据的数据类型
- order:{‘C’,‘F’},可选项,也就是输出的数组的形式是按照C语言的行优先’C’,还是按照Fortran形式的列优先‘F’存储在内存中
import numpy as np
a=np.eye(3)
print(a)
a=np.eye(4,k=1)
print(a)
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
[[0. 1. 0. 0.]
[0. 0. 1. 0.]
[0. 0. 0. 1.]
[0. 0. 0. 0.]]
深度学习中的高级用法,将数组转成one-hot形式。
import numpy as np
labels=np.array([[1],[2],[0],[1]])
print("labels的大小:",labels.shape,"\n")
#因为我们的类别是从0-2,所以这里是3个类
a=np.eye(3)[2]
print("如果对应的类别号是2,那么转成one-hot的形式",a,"\n")
res=np.eye(3)[labels.reshape(-1)]
print("labels转成one-hot形式的结果:\n",res,"\n")
labels的大小: (4, 1)
如果对应的类别号是2,那么转成one-hot的形式 [0. 0. 1.]
labels转成one-hot形式的结果:
[[0. 1. 0.]
[0. 0. 1.]
[1. 0. 0.]
[0. 1. 0.]]
4. 统计
4.1. 最大值、最小值、均值+条件
Numpy的min()函数语法如下:
numpy.min(a, axis=None, out=None, keepdims=, initial=, where=)
其中:
- a:数组。
- axis:沿着哪个轴计算最小值,默认为None,表示对整个数组求最小值。
- out:输出数组,用于存储计算结果。
- keepdims:是否保持数组的维度,默认为False,即降维处理。
- initial:初始值,表示在数组中没有元素时的返回值。
- where:条件,只有条件为True的元素才参与计算。
例如:二维数组的最小值
接着,我们来看一个二维数组,求出数组的最小值。
import numpy as np
a = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
min_value = np.min(a, axis=1)
print(min_value)
输出结果为:[1 4 7]
在这个例子中,我们传递了axis=1参数,表示我们要沿着第二个轴(也就是每一行)求最小值。最终输出的结果是每一行的最小值,形成一个一维数组。注意,这个结果是通过降维得到的。
4.2. numpy.ptp()最大值与最小值的差
numpy.ptp() 函数计算数组中元素最大值与最小值的差(最大值 - 最小值)。
numpy.ptp(a, axis=None, out=None, keepdims=, initial=, where=)
参数说明:
- a: 输入的数组,可以是一个 NumPy 数组或类似数组的对象。
- axis: 可选参数,用于指定在哪个轴上计算峰-峰值。如果不提供此参数,则返回整个数组的峰-峰值。可以是一个整数表示轴的索引,也可以是一个元组表示多个轴。
- out: 可选参数,用于指定结果的存储位置。
- keepdims: 可选参数,如果为 True,将保持结果数组的维度数目与输入数组相同。如果为 False(默认值),则会去除计算后维度为1的轴。
- initial: 可选参数,用于指定一个初始值,然后在数组的元素上计算峰-峰值。
- where: 可选参数,一个布尔数组,用于指定仅考虑满足条件的元素。
import numpy as np
a = np.array([[3,7,5],[8,4,3],[2,4,9]])
print ('我们的数组是:')
print (a)
print ('调用 ptp() 函数:')
print (np.ptp(a))
print ('沿轴 1 调用 ptp() 函数:')
print (np.ptp(a, axis = 1))
print ('沿轴 0 调用 ptp() 函数:')
print (np.ptp(a, axis = 0))
我们的数组是:
[[3 7 5]
[8 4 3]
[2 4 9]]
调用 ptp() 函数:
7
沿轴 1 调用 ptp() 函数:
[4 5 7]
沿轴 0 调用 ptp() 函数:
[6 3 6]
5. 其他
5.1. 删除空值与布尔屏蔽
布尔屏蔽是一个有用的功能,它允许我们根据我们指定的条件检索数组中的元素。
首先,查找NaN值的位置,可以使用函数np.isnan()查找NaN值的位置。接着移除NaN值,使用函数np.delete()删除NaN值所在的索引位置。
import numpy as np
a = np.array([[3,np.nan,5],[8,4,np.nan],[2,4,9]])
a
array([[ 3., nan, 5.],
[ 8., 4., nan],
[ 2., 4., 9.]])
mask = np.isnan(a)
print(mask)
# 使用布尔索引数组来选择非空值的行
non_empty_rows = np.logical_not(np.any(mask, axis=1))
#a = np.delete(a, np.where(mask))
print(non_empty_rows)
# 生成一个不含空值的新数组
cleaned_data = a[non_empty_rows]
print(cleaned_data)
[[False True False]
[False False True]
[False False False]]
[False False True]
[[2. 4. 9.]]
其中,np.logical_not这是一个逻辑函数,可按元素计算NOT arr的真值。
5.2. numpy 将uint8转换为int16
例如图像数据,dat.astype(np.int16)。
5.3. 沿轴向连接数组
import numpy as np
a = [0 , 1, 2, 3, 4, 5]
# list转numpy数组
a1 = np.array(a)
print(a1)
# 重新调整数据/矩阵为二维
a2 = a1.reshape(3,2)
print(a2)
# 沿着新轴连接数组/矩阵,增加一个维度,形成三维数组/矩阵/向量
a3 = np.stack((a2,a2,a2), axis=2)
print(a3)
print(a3.shape)
# 一维转变为三维
a4 = a1.reshape(3,2,1)
print(a4)
[0 1 2 3 4 5]
[[0 1]
[2 3]
[4 5]]
[[[0 0 0]
[1 1 1]]
[[2 2 2]
[3 3 3]]
[[4 4 4]
[5 5 5]]]
(3, 2, 3)
5.4. 如何计算两组数的欧式距离
# Input
a = np.array([1,2,3,4,5])
b = np.array([4,5,6,7,8])
# Solution
dist = np.linalg.norm(a-b)
dist
# > 6.7082039324993694
5.5. 如何计算numpy数组的移动平均值
对于给定的一维数组,计算窗口大小为3的移动平均值。
def moving_average(a, n=3) :
ret = np.cumsum(a, dtype=float)
ret[n:] = ret[n:] - ret[:-n]
return ret[n - 1:] / n
np.random.seed(100)
Z = np.random.randint(10, size=10)
print('array: ', Z)
# Method 1
moving_average(Z, n=3).round(2)
# Method 2: # Thanks AlanLRH!
# np.ones(3)/3 gives equal weights. Use np.ones(4)/4 for window size 4.
np.convolve(Z, np.ones(3)/3, mode='valid')
# > array: [8 8 3 7 7 0 4 2 5 2]
# > moving average: [ 6.33 6. 5.67 4.67 3.67 2. 3.67 3. ]
参考:
https://www.numpy.org.cn/article/basics/understanding_numpy.html
https://www.numpy.org.cn/article/basics/an_introduction_to_scientific_python_numpy.html
https://www.numpy.org.cn/article/basics/numpy_matrices_vectors.html
https://www.numpy.org.cn/article/advanced/numpy_exercises_for_data_analysis.html
https://www.runoob.com/numpy/numpy-statistical-functions.html
若oo尘. 【Python之numpy库】3.np.linalg.pinv和np.linalg.inv 求逆矩阵与伪逆矩阵. CSDN博客. 2020.11
鸣谦12. 矩阵和向量的点乘与叉乘. CSDN博客. 2021.04