一、模块平台框架
平台介绍
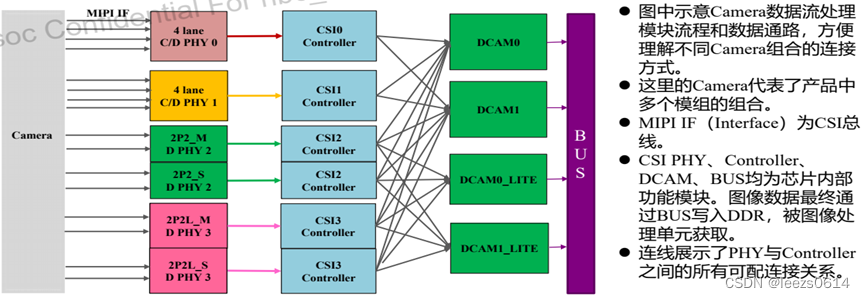
基于UMS9620x平台集成Camera时,共有四类信号需要了解:
1、MIPI CSI信号:该平台有DPHY和CPHY两种MIPI信号。
DPHY配置:包括数对差分数据信号DP/N,和一对差分时钟信号CKP/N。
CPHY配置:最多有3lane,每lane由ABC三条数据组成。
Camera的连接方式受限于UMS9620x内部的CSI PHY、CSI Controller和DCAM模块。
2、I2C信号:UMS9620x作为Controller,通过I2C总线对Camera进行配置或者对Camera状态进行读取。
3、控制信号:控制信号通常有PWDN、RST、MCLK信号;双摄模式下还有FS_DUALCAM(V_SNYC)信号
用于多个Camera之间同步抓帧。
4、四组电源:
Sensor模拟电源:AVDD
核心数字部分电源:DVDD
IO接口电源:IOVDD
对焦马达电源:AFVDD
Camera功能框图
二、适配流程介绍
下面T760平台项目前后摄为例介绍,如前摄ov02b10,后摄ov16885。
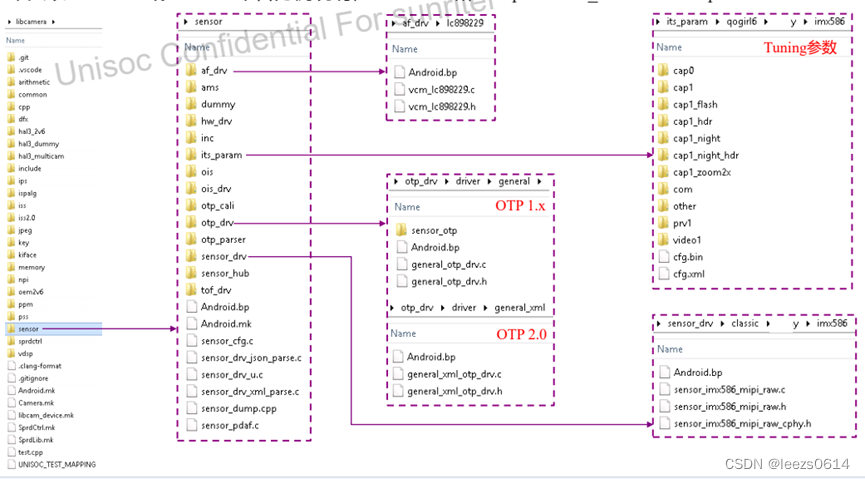
camera相关目录
device/sprd/mpool/product/unisoc/usvi/violators/camera/msoc/qogirn6pro/qogirn6pro.mk
device/sprd/qogirn6pro/ums9620_nb10/module/camera/md.mk
device/sprd/qogirn6pro/ums9620_nb10/module/camera/sensor_config.xml
bsp/kernel5.4/kernel5.4/arch/arm64/boot/dts/sprd/ums9620-nb10-overlay.dts
vendor/sprd/modules/libcamera/libcam_device.mk
vendor/sprd/modules/libcamera/sensor/af_drv/vcm_lib_cfg.mk
vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov02b10
vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov16885
vendor/sprd/modules/libcamera/sensor/sensor_cfg.c
vendor/sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov02b10
vendor/sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov16885
vendor/sprd/modules/libcamera/sensor/sensor_drv/sensor_lib_cfg.mk
vendor/sprd/modules/libcamera/kernel_module/flash/sc2703s
其中tuning参数,使用工具自动生成,具体在tuning文档中介绍。
图例:
1、修改device配置
device/sprd/mpool/product/unisoc/usvi/violators/camera/msoc/qogirn6pro/qogirn6pro.mk
device/sprd/qogirn6pro/ums9620_nb10/module/camera/md.mk
device/sprd/qogirn6pro/ums9620_nb10/module/camera/sensor_config.xml
修改参考方法如下:
device/sprd/mpool/product/unisoc/usvi/violators/camera/msoc/qogirn6pro/qogirn6pro.mk
TUNING_PARAM_LIST := "ov16885,ov02b10"
device/sprd/qogirn6pro/ums9620_nb10/module/camera/md.mk
CAMERA_SUPPORT_SIZE := s16
FRONT_CAMERA_SUPPORT_SIZE := s2
#BACK_EXT_CAMERA_SUPPORT_SIZE := s2
#FRONT_EXT_CAMERA_SUPPORT_SIZE := s8
#BACK_EXT2_CAMERA_SUPPORT_SIZE := s8
TARGET_BOARD_SW_GTM_SUPPORT := true
TARGET_BOARD_CAMERA_DUAL_SENSOR_MODULE := false
CAMERA_SENSOR_TYPE_BACK := ov16885
CAMERA_SENSOR_TYPE_FRONT := ov02b10
#CAMERA_SENSOR_TYPE_BACK_EXT := ov16885
#CAMERA_SENSOR_TYPE_FRONT_EXT := ov02b10
SENSOR_OV8856_TELE := false
TARGET_BOARD_CAMERA_DUAL_SENSOR_MODULE := false
TUNING_PARAM_LIST := "ov16885,ov02b10"
TARGET_BOARD_CAMERA_4IN1 := false
#TARGET_BOARD_SENSOR_OV4C := false
TARGET_BOARD_SENSOR_SS4C := false
TARGET_BOARD_CAMERA_FLASH_LED_0 := false # flash led0 config
TARGET_BOARD_CAMERA_FLASH_LED_1 := false # flash led1 config
#TARGET_BOARD_CAMERA_FLASH_TYPE := ocp8137
TARGET_BOARD_MULTICAMERA_SUPPORT := false
device/sprd/qogirn6pro/ums9620_nb10/module/camera/sensor_config.xml
<root>
<!-->
sensor id 1
<-->
<CameraModuleCfg>
<SlotId>1</SlotId>
<SensorName>ov16885</SensorName>
<Facing>FRONT</Facing>
<Orientation>270</Orientation>
<Resource_cost>55</Resource_cost>
<ConflictingDevice>1</ConflictingDevice>
<VCM>
<AfName>dw9714v</AfName>
<Mode>2</Mode>
</VCM>
<OTP>
<E2prom>
<OtpName>general</OtpName>
<I2cAddr>0xa4</I2cAddr>
<E2promNum>0</E2promNum>
<E2promSize>8192</E2promSize>
</E2prom>
</OTP>
<TuningParameter>
<TuningName>ov16885</TuningName>
</TuningParameter>
</CameraModuleCfg>
<!-->
sensor id 0
<-->
<CameraModuleCfg>
<SlotId>0</SlotId>
<SensorName>ov02b10</SensorName>
<Facing>BACK</Facing>
<Orientation>90</Orientation>
<Resource_cost>100</Resource_cost>
<TuningParameter>
<TuningName>ov02b10</TuningName>
</TuningParameter>
</CameraModuleCfg>
</root>
2、修改驱动
添加驱动文件目录:
vendor/sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov02b10
vendor/sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov16885
调试时,需要注意i2c地址,打开驱动头文件,修改i2c地址,比如:
sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov02b10/sensor_ov02b10_mipi_raw.h
sprd/modules/libcamera/sensor/sensor_drv/classic/OmniVision/ov16885/sensor_ov16885_mipi_raw.h
#define I2C_SLAVE_ADDR 0x20 /* 8bit slave address*/
sprd/modules/libcamera/sensor/sensor_drv/sensor_lib_cfg.mk
PRODUCT_PACKAGES += libsensor_imx351 \
libsensor_ov5675_dual \
libsensor_ov7251 \
libsensor_ov8856_shine \
libsensor_ov8856_shine_front \
libsensor_ov02b10 \
libsensor_ov16885
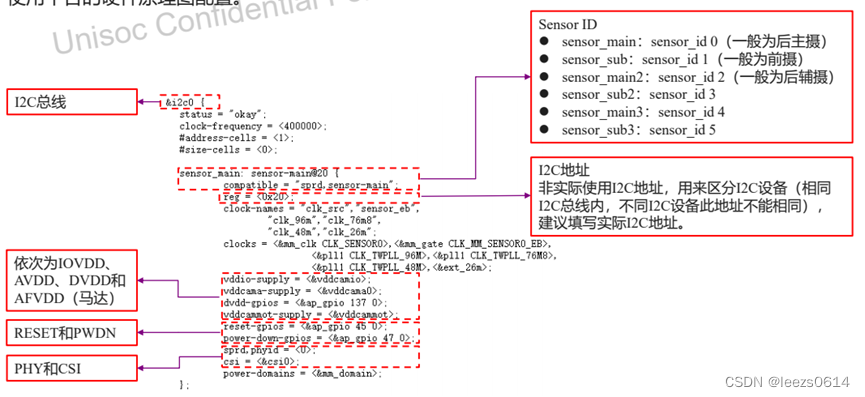
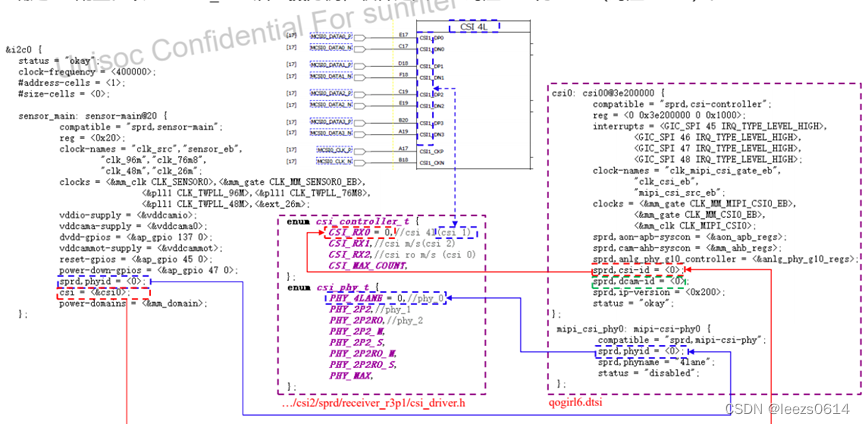
3、配置设备树
设备树路径:根据原理图,sensor datasheet等配置。
bsp/kernel5.4/kernel5.4/arch/arm64/boot/dts/sprd/ums9620-nb10-overlay.dts
&i2c0 {
status = "okay";
clock-frequency = <400000>;
#address-cells = <1>;
#size-cells = <0>;
sensor_main: sensor-main@20 {
compatible = "sprd,sensor-main";
reg = <0x20>;
clock-names = "clk_src","sensor_eb",
"clk_96m","clk_64m",
"clk_51m2","clk_48m","clk_26m";
clocks = <&mm_clk CLK_SENSOR0>,<&mm_gate CLK_SENSOR0_EN>,
<&g5l_pll CLK_TGPLL_96M>,<&g5l_pll CLK_TGPLL_64M>,
<&g5l_pll CLK_TGPLL_51M2>,<&g5l_pll CLK_TGPLL_48M>,<&ext_26m>;
vddio-supply = <&vddcamio>;
vddcama-supply = <&vddcama0>;
vddcamd-supply = <&vddcamd0>;
vddcammot-supply = <&vddcammot0>;
reset-gpios = <&ap_gpio 39 0>;
power-down-gpios = <&ap_gpio 45 0>;
sprd,phyid = <0>;
csi = <&csi0>;
power-domains = <&mm_domain>;
};
};
&i2c1 {
status = "okay";
clock-frequency = <400000>;
#address-cells = <1>;
#size-cells = <0>;
sensor_sub: sensor-sensor_sub@78 {
compatible = "sprd,sensor-sub";
reg = <0x78>;
clock-names = "clk_src","sensor_eb",
"clk_96m","clk_64m",
"clk_51m2","clk_48m","clk_26m";
clocks = <&mm_clk CLK_SENSOR1>,<&mm_gate CLK_SENSOR1_EN>,
<&g5l_pll CLK_TGPLL_96M>,<&g5l_pll CLK_TGPLL_64M>,
<&g5l_pll CLK_TGPLL_51M2>,<&g5l_pll CLK_TGPLL_48M>,<&ext_26m>;
vddio-supply = <&vddcamio>;
vddcama-supply = <&vddcama1>;
vddcamd-supply = <&vddcamio>;
reset-gpios = <&ap_gpio 40 0>;
power-down-gpios = <&ap_gpio 46 0>;
sprd,phyid = <1>;
csi = <&csi1>;
power-domains = <&mm_domain>;
};
};
修改方法参考如下:
根据硬件原理图配置,i2c总线、供电、GPIO、PHY、CSI等等。

4、OTP驱动配置
vendor/sprd/modules/libcamera/sensor/otp_drv/driver/
展锐OTP方案:按照展锐平台OTP烧录规范,数据存储在E2prom中,建议使用general驱动。
个性化OTP方案:需另行编写OTP驱动xxx_yyy,并将OtpName配置为xxx_yyy。
NB1.0项目采用展锐的OTP方案,注意i2c地址,大小即可。
device/sprd/qogirn6pro/ums9620_nb10/module/camera/sensor_config.xml
<CameraModuleCfg>
<SlotId>1</SlotId>
<SensorName>ov16885</SensorName>
<Facing>FRONT</Facing>
<Orientation>270</Orientation>
<Resource_cost>55</Resource_cost>
<ConflictingDevice>1</ConflictingDevice>
<VCM>
<AfName>dw9714v</AfName>
<Mode>2</Mode>
</VCM>
<OTP>
<E2prom>
<OtpName>general</OtpName>
<I2cAddr>0xa4</I2cAddr>
<E2promNum>0</E2promNum>
<E2promSize>8192</E2promSize>
</E2prom>
</OTP>
<TuningParameter>
<TuningName>ov16885</TuningName>
</TuningParameter>
</CameraModuleCfg>
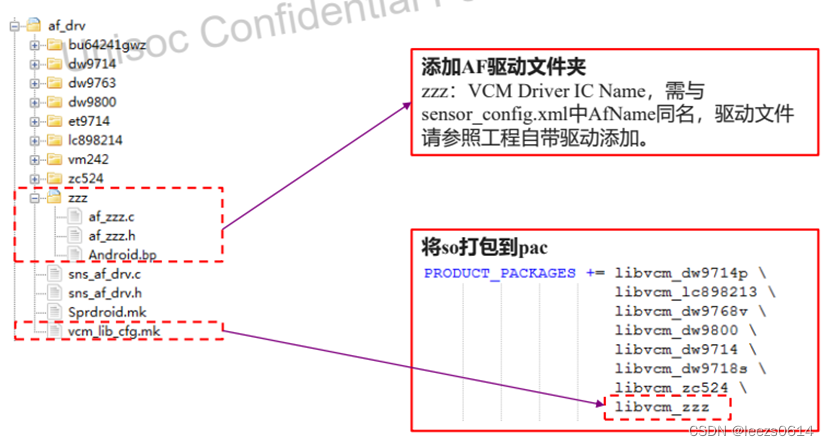
5、AF驱动配置
vendor/sprd/modules/libcamera/sensor/af_drv/vcm_lib_cfg.mk
vendor/sprd/modules/libcamera/sensor/af_drv/dw9714/
vendor/sprd/modules/libcamera/sensor/af_drv/vcm_lib_cfg.mk
PRODUCT_PACKAGES += libvcm_dw9714p \
libvcm_dw9714v \
libvcm_lc898213 \
libvcm_dw9768v \
libvcm_dw9800 \
libvcm_dw9825a \
libvcm_dw9714 \
6、Flash驱动配置
vendor/sprd/modules/libcamera/kernel_module/flash/sc2703s/
本项目用的默认驱动,不需要额外的配置,用默认的即可。
7、配置otp
和马达驱动一样,otp可以使用展锐的平台otp驱动,在sensor_cfg.c中添加。
8、Tuning参数配置
vendor/sprd/modules/libcamera/libcam_device.mk
vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov02b10
vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov16885
vendor/sprd/modules/libcamera/libcam_device.mk
ifneq ($(filter $(TARGET_BOARD_PLATFORM), ums9620), )
PRODUCT_COPY_FILES += $(call find-copy-subdir-files,*,vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov16885,vendor/firmware/ov16885) \
$(call find-copy-subdir-files,*,vendor/sprd/modules/libcamera/sensor/its_param/qogirn6pro/OmniVision/ov02b10,vendor/firmware/ov02b10)
endif

其中tuning参数,使用工具自动生成,具体在tuning文档中介绍。
9、编译
1、整编
source build/envsetup.sh
lunch <boardname>
kheader
进入BSP目录,设置BSP环境变量和编译选项:
source build/envsetup.sh
lunch <boardname_bsp>
编译整个工程,返回根目录执行:
Make
2、单独编译Camera模块
source build/envsetup.sh
lunch <boardname>
kheader
进入vendor/sprd/modules/libcamera目录:
mm或mma
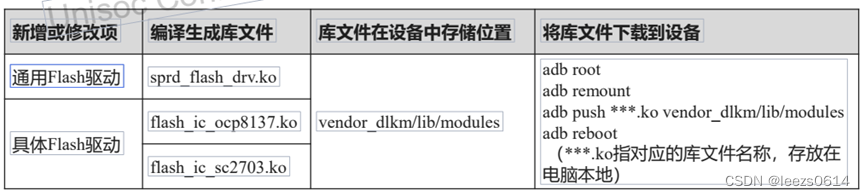
3、单独编译Flash ko
source build/envsetup.sh
lunch <boardname_bsp>
编译通用Flash驱动ko,在BSP下执行:
make modules -m sprd_flash_drv.ko
编译具体Flash驱动ko,在BSP下执行:
make modules -m flash_ic_ocp8137.ko
make modules -m flash_ic_sc2703.ko
4、编译DTS
source build/envsetup.sh
lunch <boardname>
编译boot.img:
make bootimage
编译dtbo.img:
make dtboimage
10、下载
1、下载Sensor/AF/OTP驱动
out/target/product/ums9620_nb10/odm/lib/

2、下载sensor_config.xml
adb root
adb remount
adb push sensor_config.xml odm/etc
adb reboot
3、下载Sensor Tuning参数
adb root
adb remount
adb push ov16885 vendor/firmware/ov16885
adb reboot
也可使用IspTool工具下载参数,具体请参考IspTool工具包中的使用指导手册。
4、下载Flash驱动
bsp/out/androidt/ums512_1h10_Natv/dist/modules/archive/
5、下载DTS
修改DTS后,编译生成的image文件输出目录:
out/target/product/ums9620_nb10。
将DTS下载到设备:boot.img和dtbo.img存放在电脑本地。
adb reboot bootloader
fastboot flash boot boot.img
fastboot flash dtbo dtbo.img
fastboot reboot
也可使用展锐pac下载工具ResearchDownload下载image,具体请参考ResearchDownload工具包中的使用指导手册。
三、常见问题
1、互换前后摄ID
device/sprd/qogirn6pro/ums9620_nb10/module/camera/sensor_config.xml
把sensor id前后摄内容互换,如SlotId、Facing等选项内容,具体以实际为准。
bsp/kernel5.4/kernel5.4/arch/arm64/boot/dts/sprd/ums9620-nb10-overlay.dts
主要是红框内容互换:
&i2c0 {
status = "okay";
sensor_sub: sensor-sub@78 {
compatible = "sprd,sensor-sub";
reg = <0x78>;
... ...
status = "okay";
};
};
&i2c1 {
status = "okay";
sensor_main: sensor-main@20 {
compatible = "sprd,sensor-main";
reg = <0x20>;
... ...
status = "okay";
};
};



![2023年中国钢卷尺产量、销量、市场均价及市场规模分析[图]](https://img-blog.csdnimg.cn/img_convert/4b4a3257eb1f6b98588224effc6c9a04.png)