系列文章目录
C++技能系列
Linux通信架构系列
C++高性能优化编程系列
深入理解软件架构设计系列
高级C++并发线程编程
设计模式系列
期待你的关注哦!!!

现在的一切都是为将来的梦想编织翅膀,让梦想在现实中展翅高飞。
Now everything is for the future of dream weaving wings, let the dream fly in reality.
AutoSar CP学习概要
- 系列文章目录
- 一、AutoSar CP学习资源
- 1.1 AutoSar官网文档
- 1.2 AutoSar CP开源源码
- 1.3 软硬件工具
- 1.4 底层硬件知识
- 1.5 通信协议及工作语言
- 二、AutoSar CP 简介
- 2.1 汽车软件
- 2.2 AutoSar架构
- 三、制作整车控制器的简单DEMO
- 3.1 VCU简要结构框图
- 3.2 工作流
- 四、AutoSAR架构下通信
- 4.1 CAN通信
- 4.2 LIN通信
- 4.3 ETH通信
- 五、网络管理
- 六、J1939协议
- 六、ECUM
- 七、存储栈
- 八、XCP
- 九、诊断
- 十、模式配置
- 十一、ASW层
- 十二、系统描述
- 十三、RTE 是VFB的实现
- 十四、 OS的必要性
- 十五、MCAL简介与驱动分类
- 十六、集成与编译
一、AutoSar CP学习资源
1.1 AutoSar官网文档
地址:https://www.autosar.org
1.2 AutoSar CP开源源码
地址:https://github.com/openAUTOSAR/classic-platform/
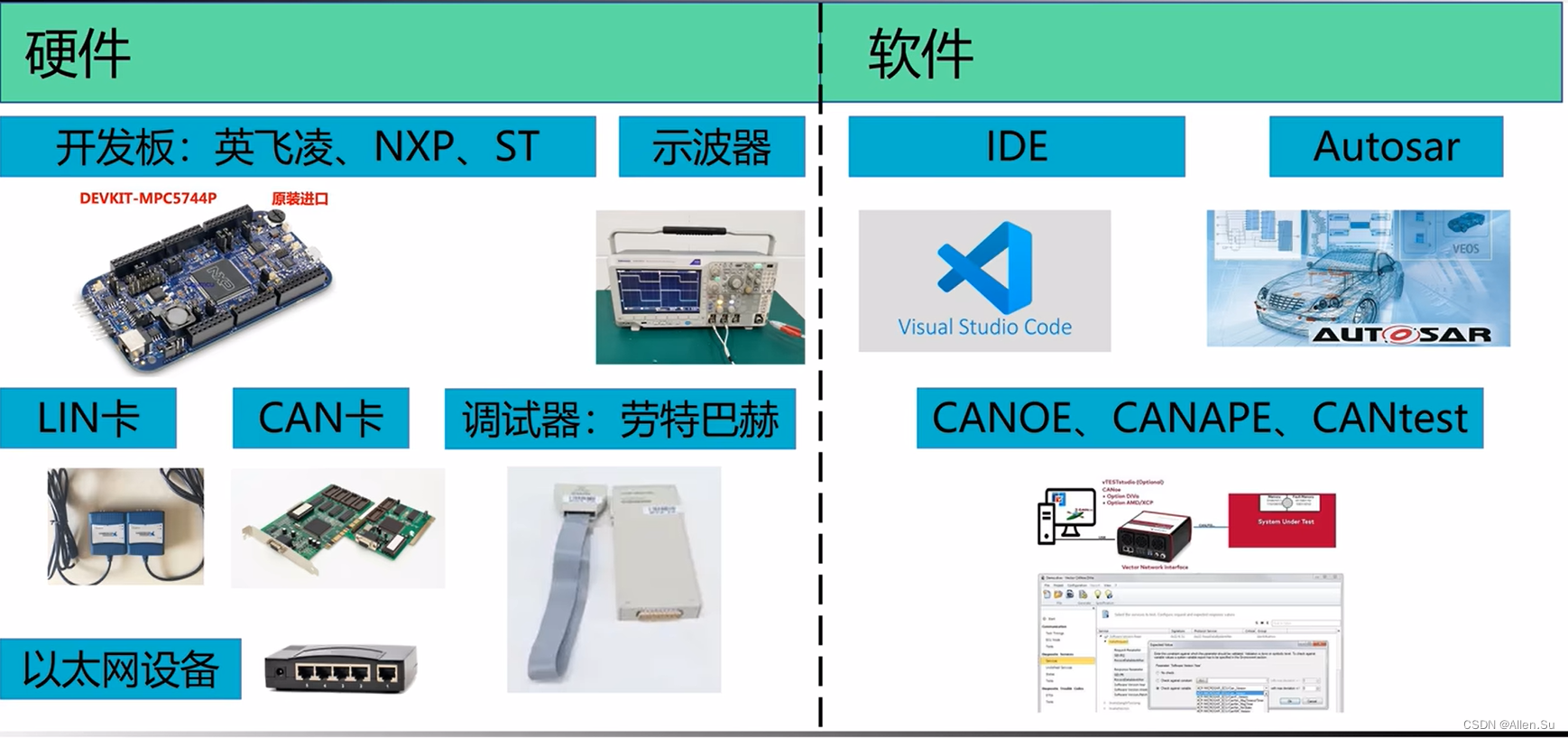
1.3 软硬件工具
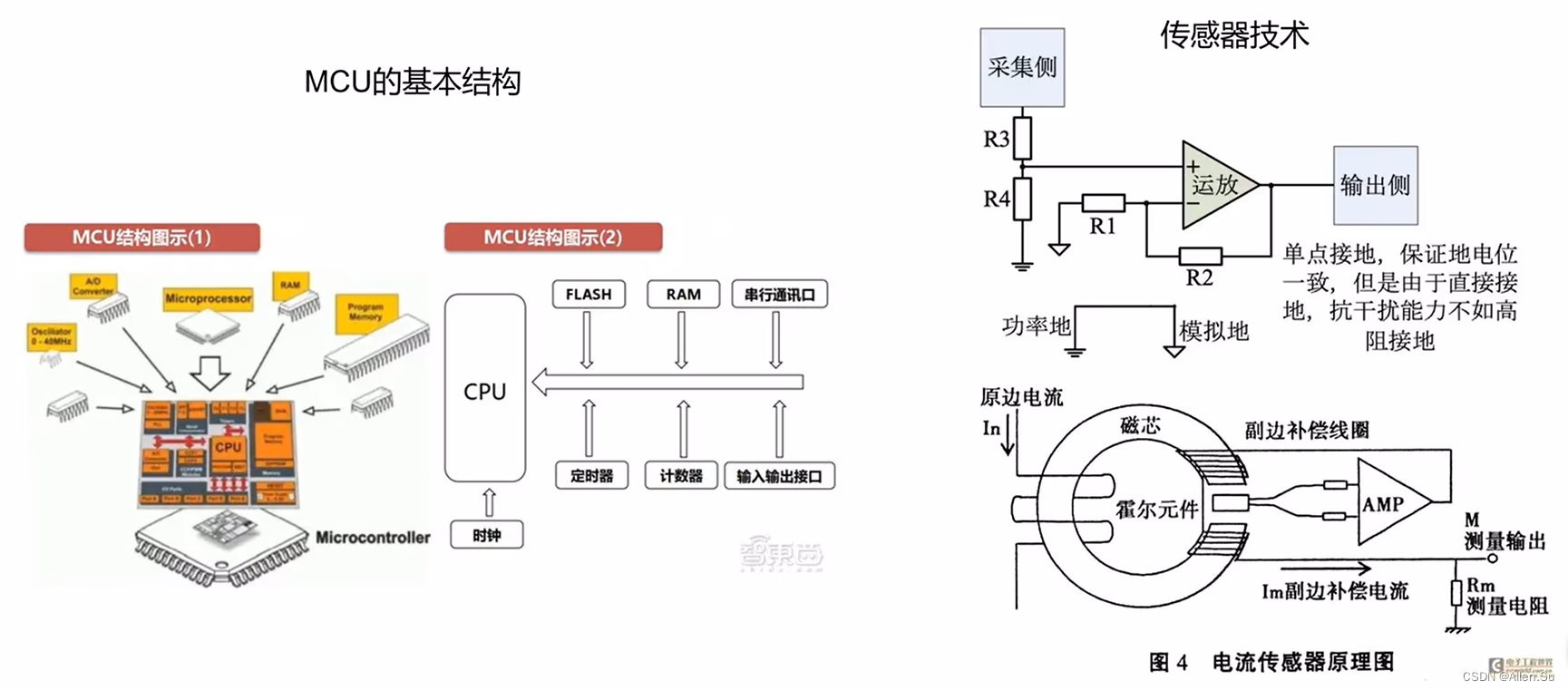
1.4 底层硬件知识
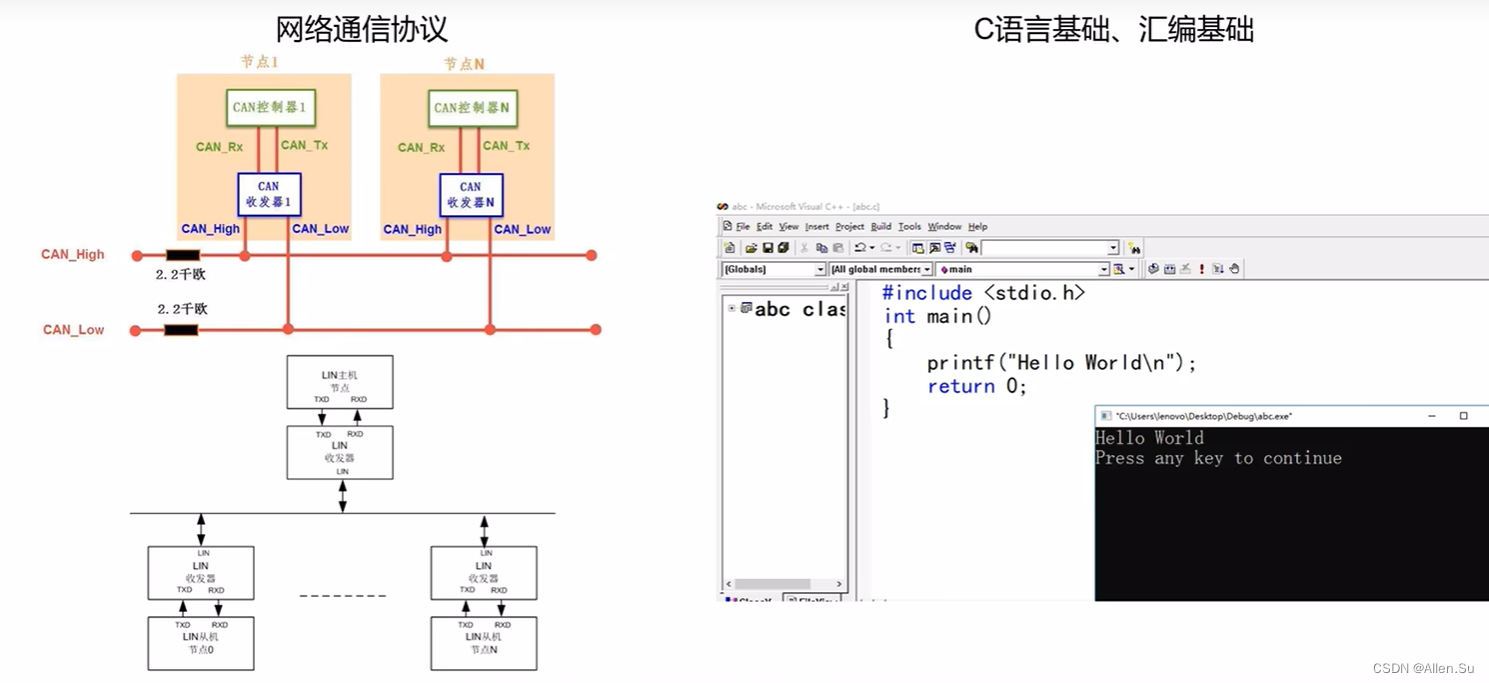
1.5 通信协议及工作语言
二、AutoSar CP 简介
2.1 汽车软件

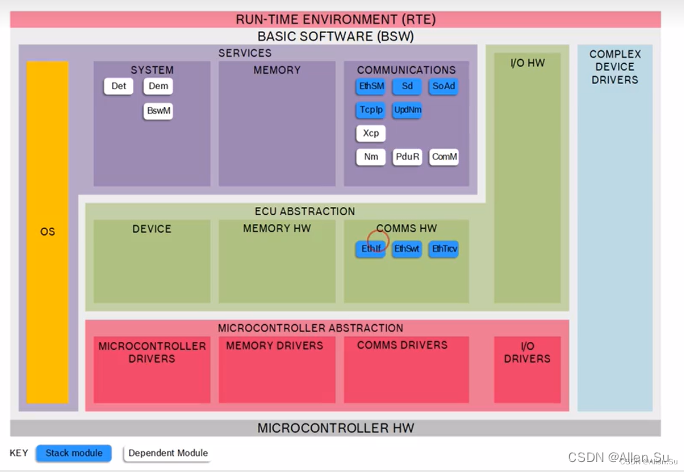
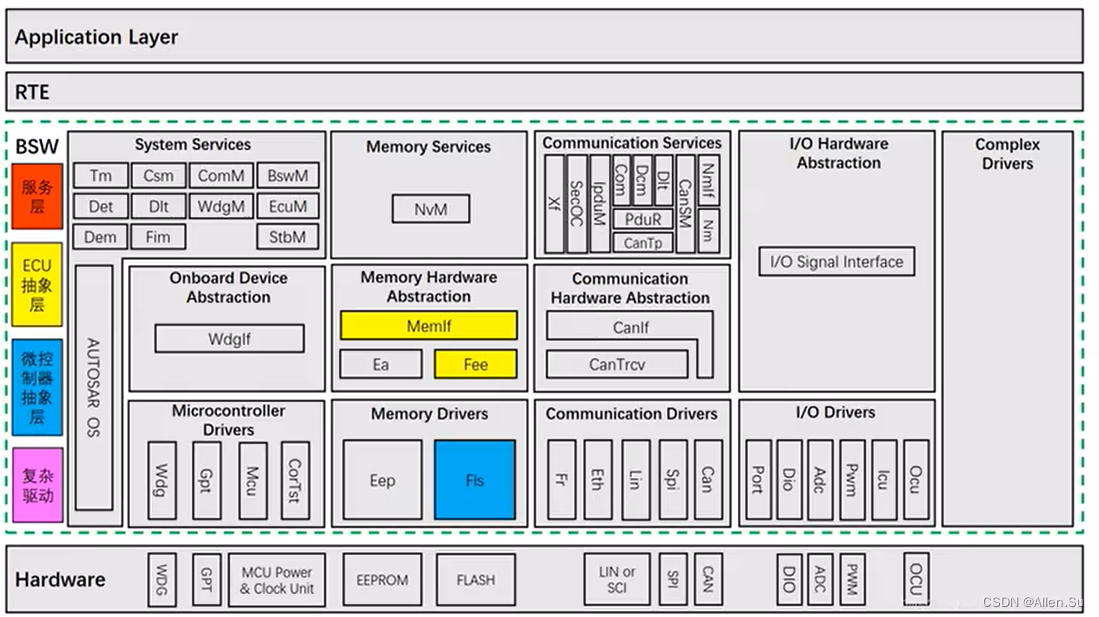
2.2 AutoSar架构

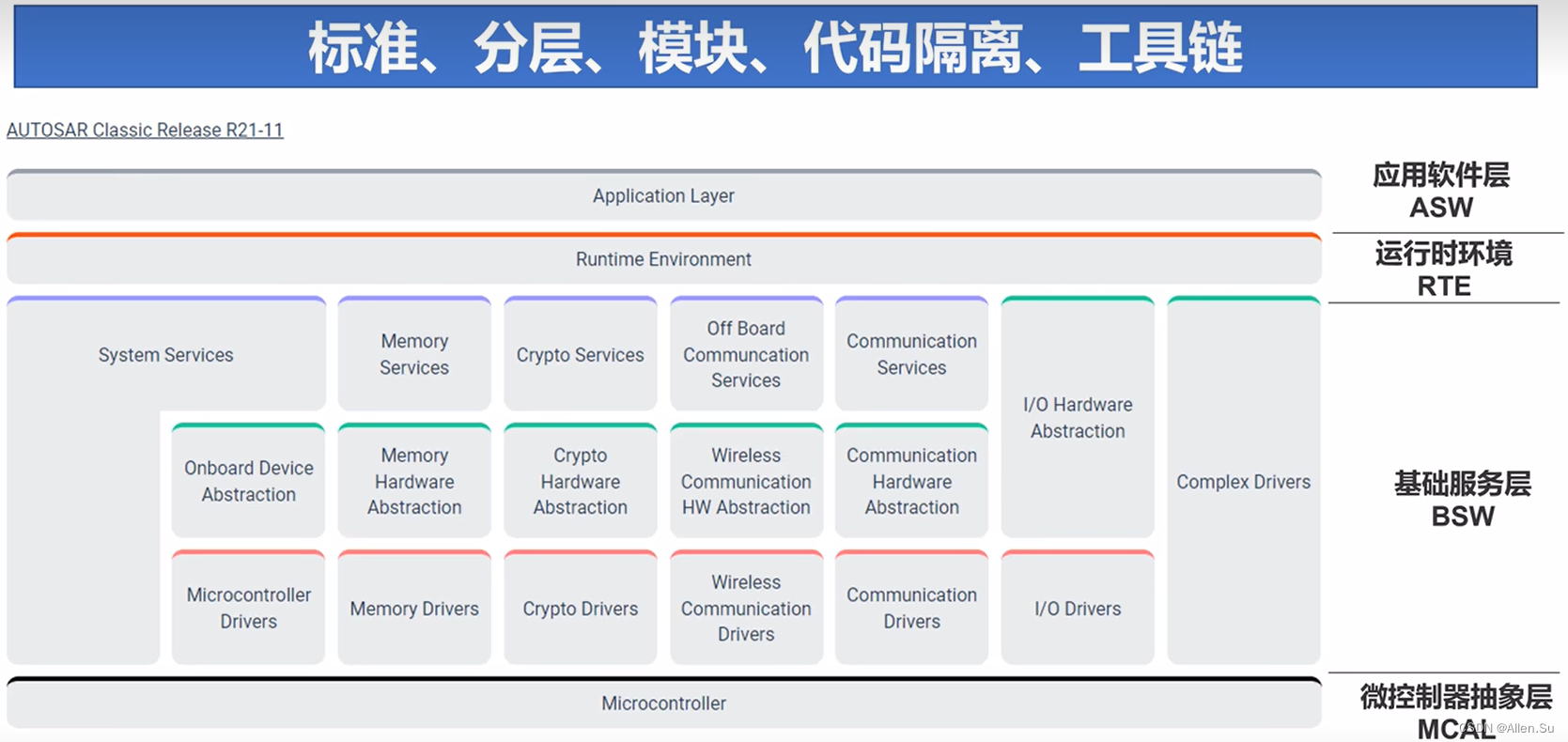
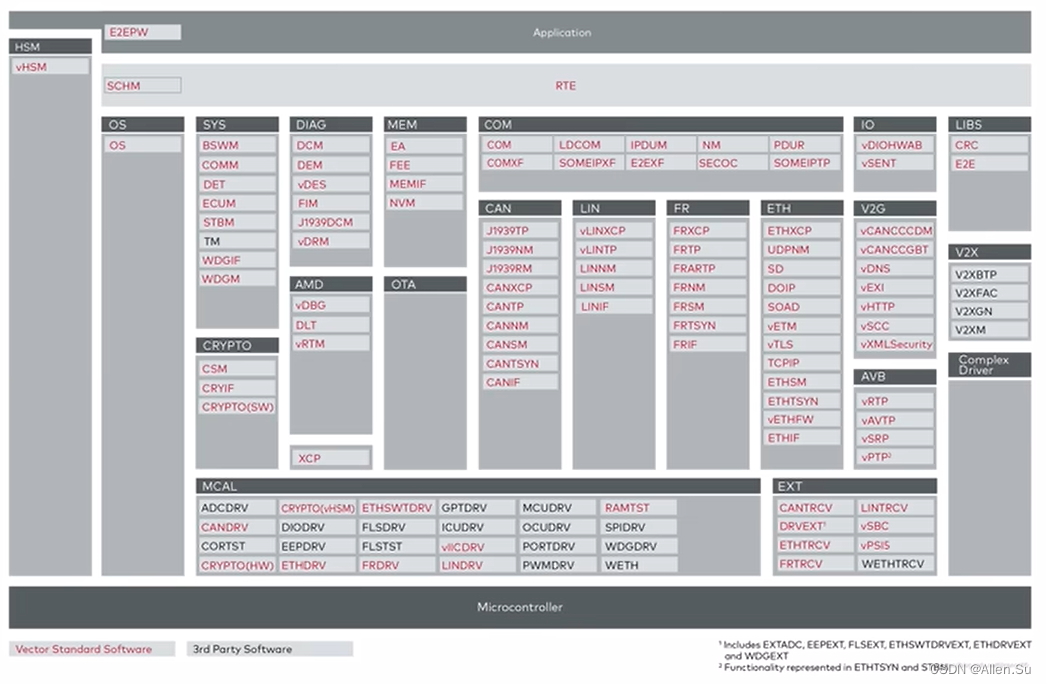
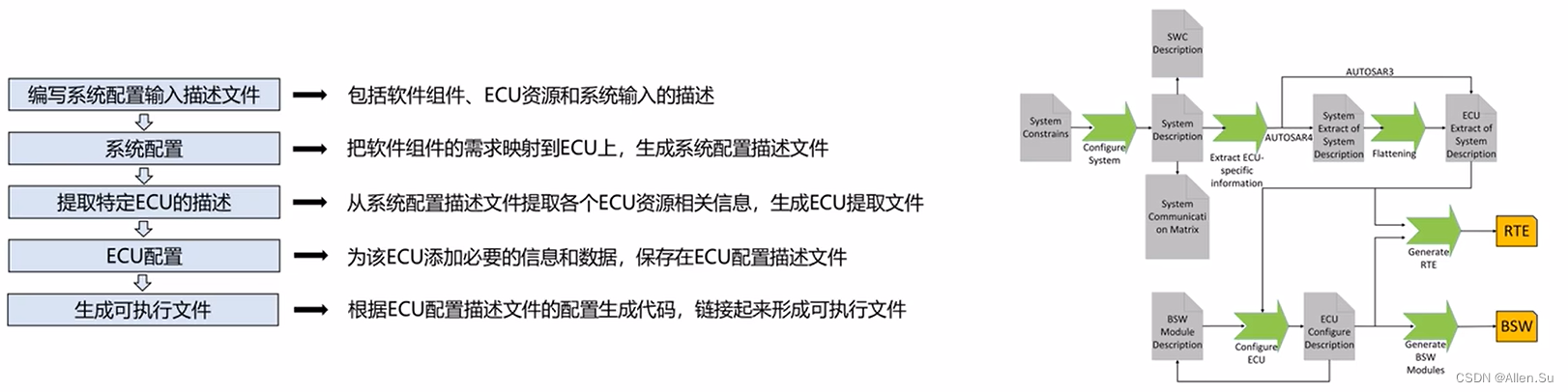
AUTOSAR为汽车电子软件系统开发过程定义了一套通用的技术方法,即AUTOSAR方法论。该方法论描述了从系统配置到ECU可执行代码产生过程的设计步骤,能够帮助开发人员掌握开发流程从而主导和推进符合AUTOSAR标准的系统的开发过程。
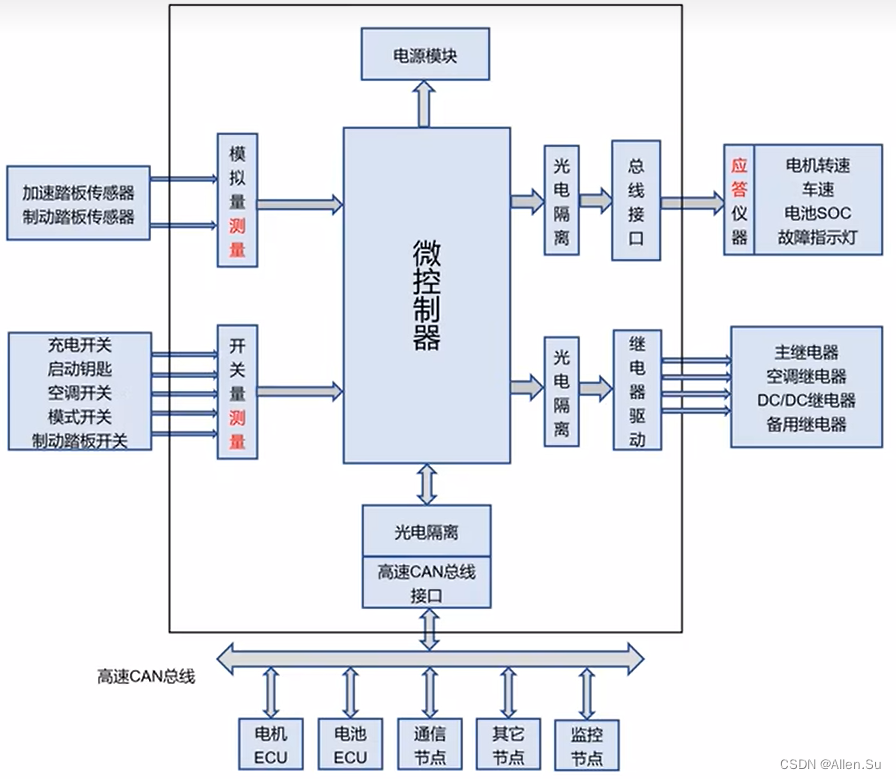
三、制作整车控制器的简单DEMO
3.1 VCU简要结构框图
3.2 工作流

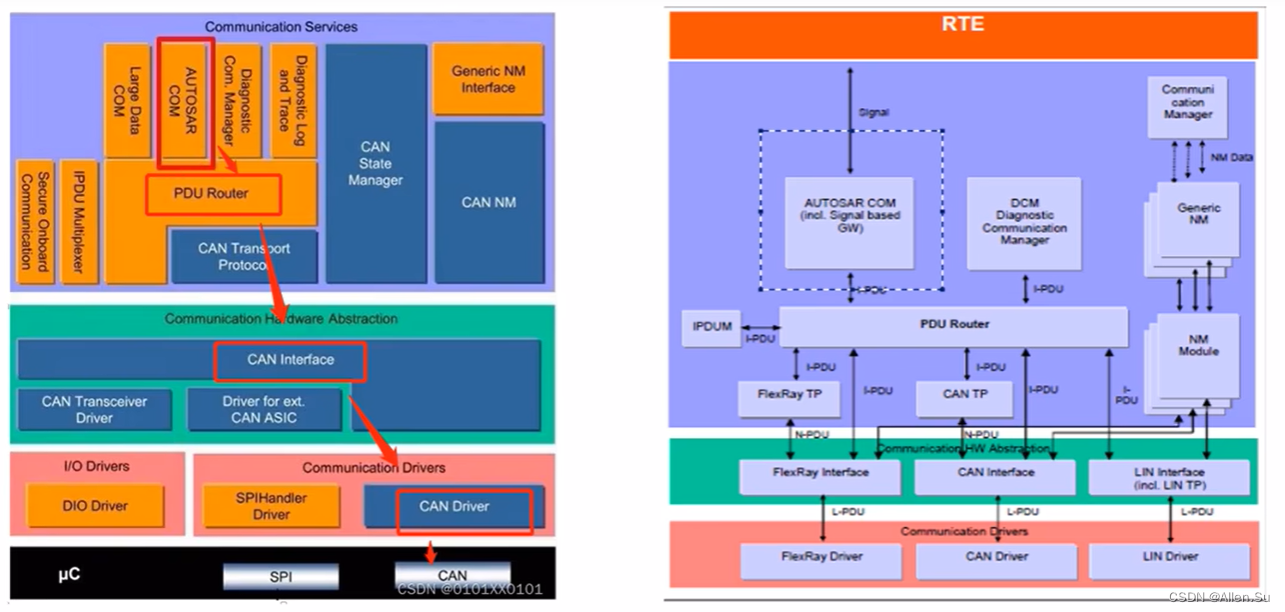
四、AutoSAR架构下通信
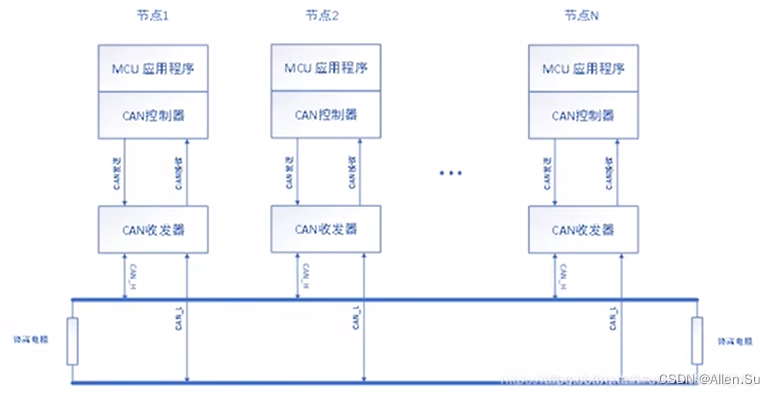
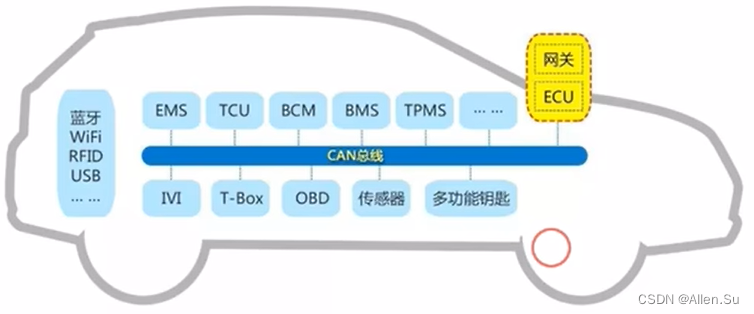
4.1 CAN通信
CAN,全称为“Controller Area Network”,即控制器局域网,是一种多主方式的串行通讯总线,是国际上应用最广泛的现场总线之一。
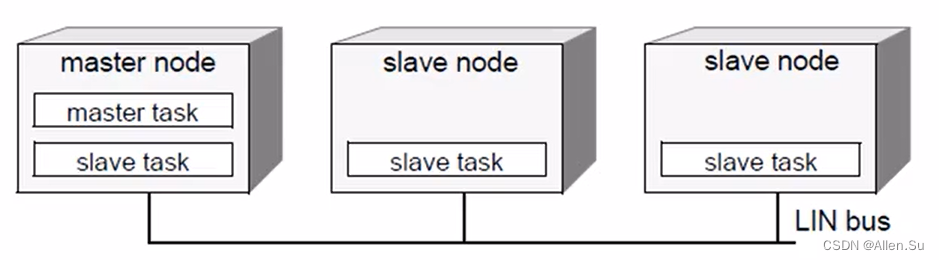
4.2 LIN通信
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯总线,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
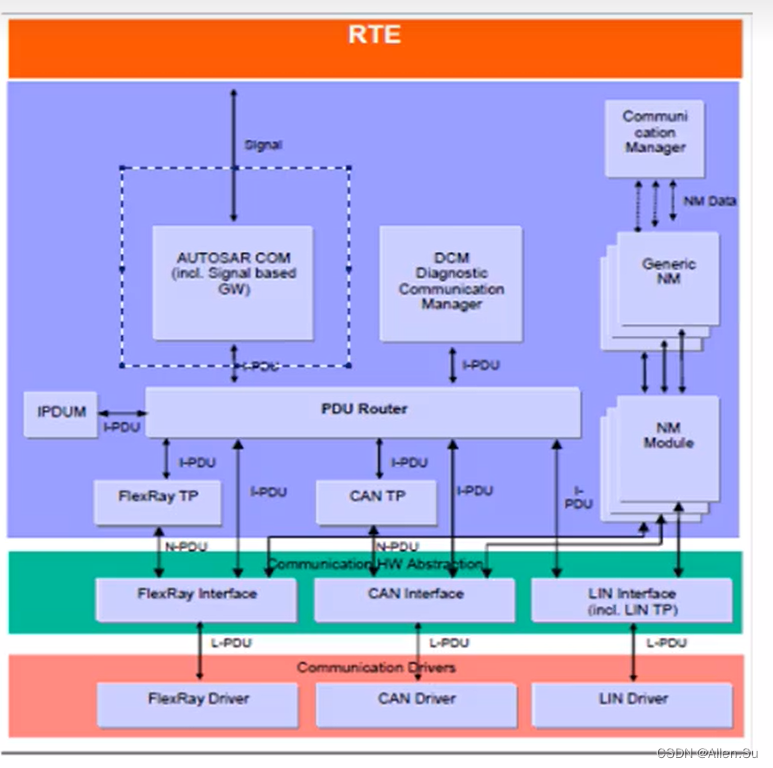
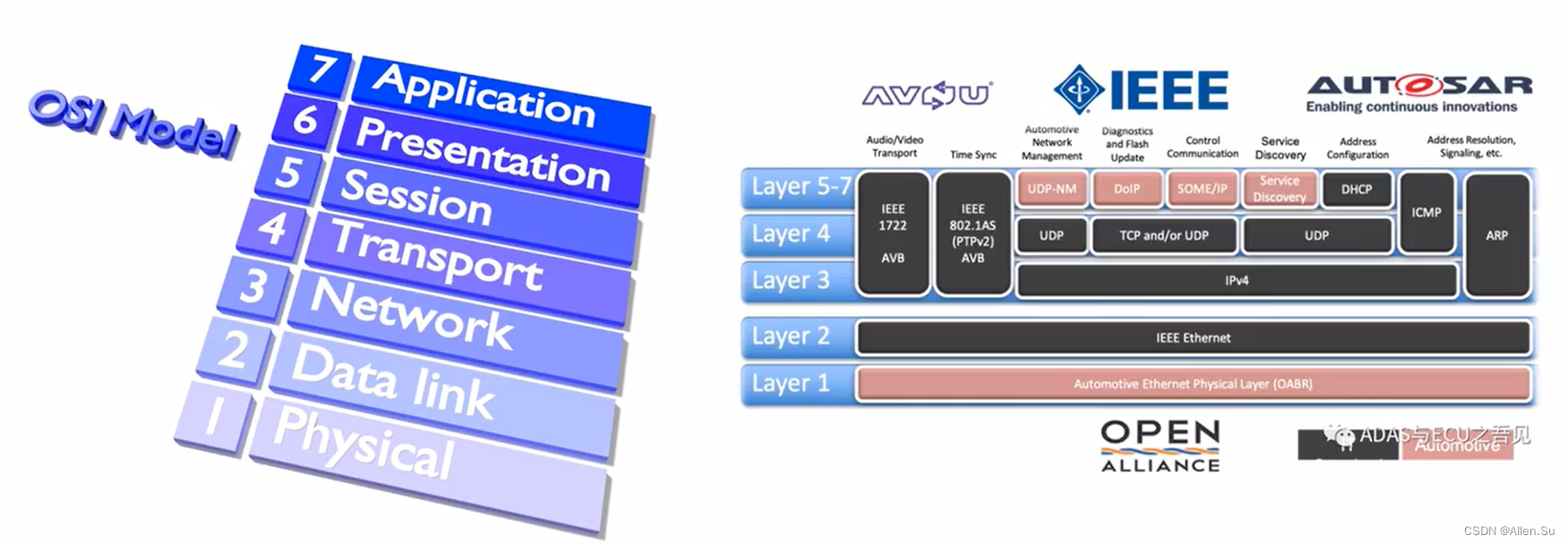
4.3 ETH通信
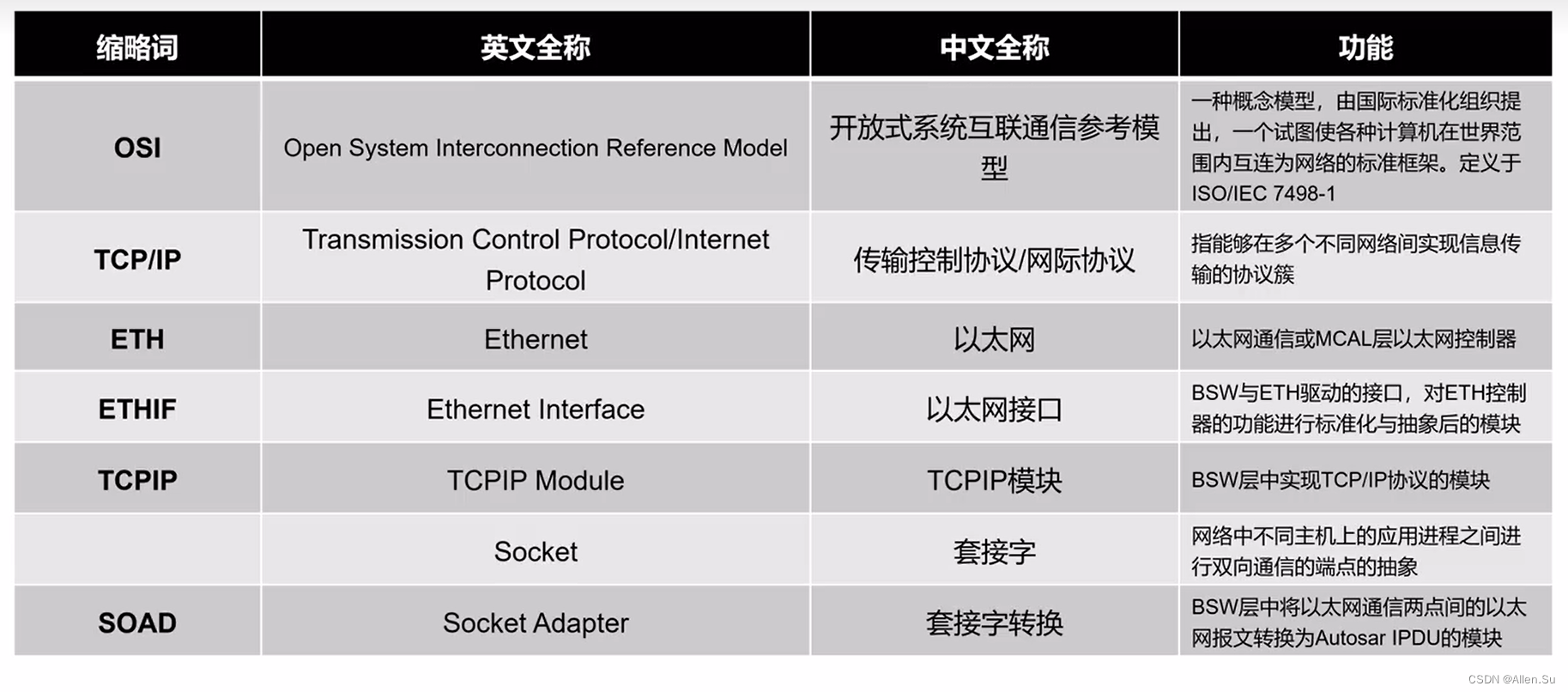
AutoSAR对于OSI模型的实现
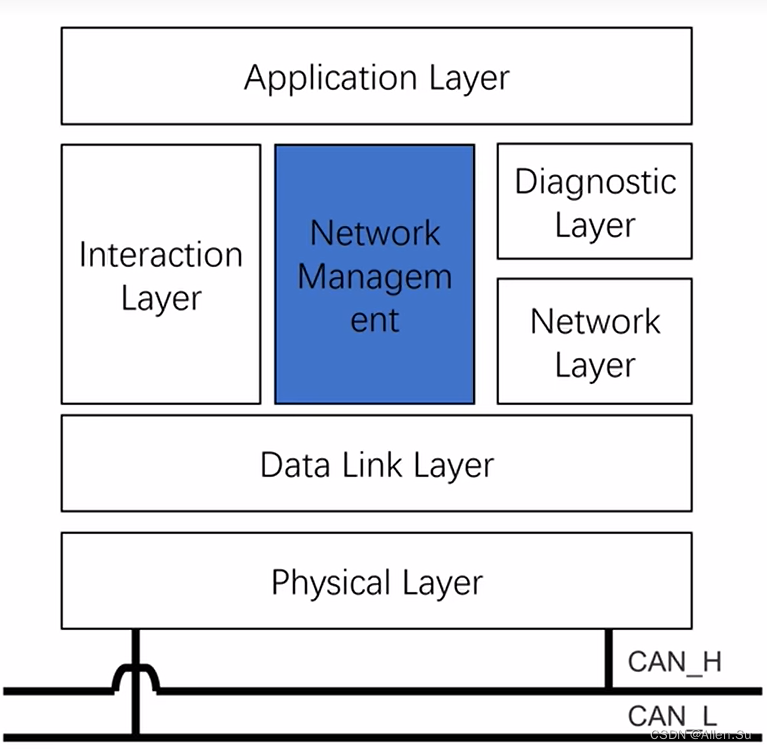
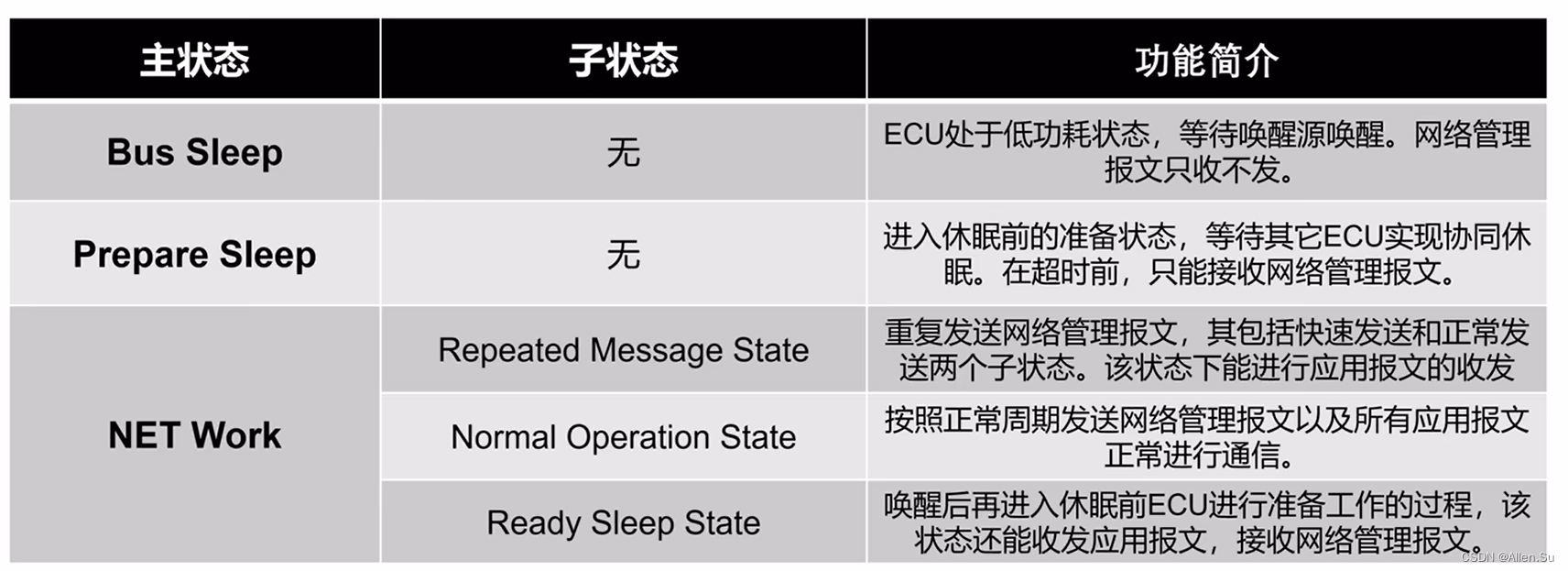
五、网络管理
网络管理的含义:
汽车系统中存在着多种ECU控制单元,这些ECU控制单元并不是孤立的,而是协同工作。汽车电子系统通过车载网络对所有的ECU进行配置管理和协调工作的过程之为网络管理。
网络管理的目的:
使网络中的ECU节点有序的睡眠和唤醒。在没有通信需求的时候睡眠,在需要通信的时候唤醒,可以节约汽车电池的电量。

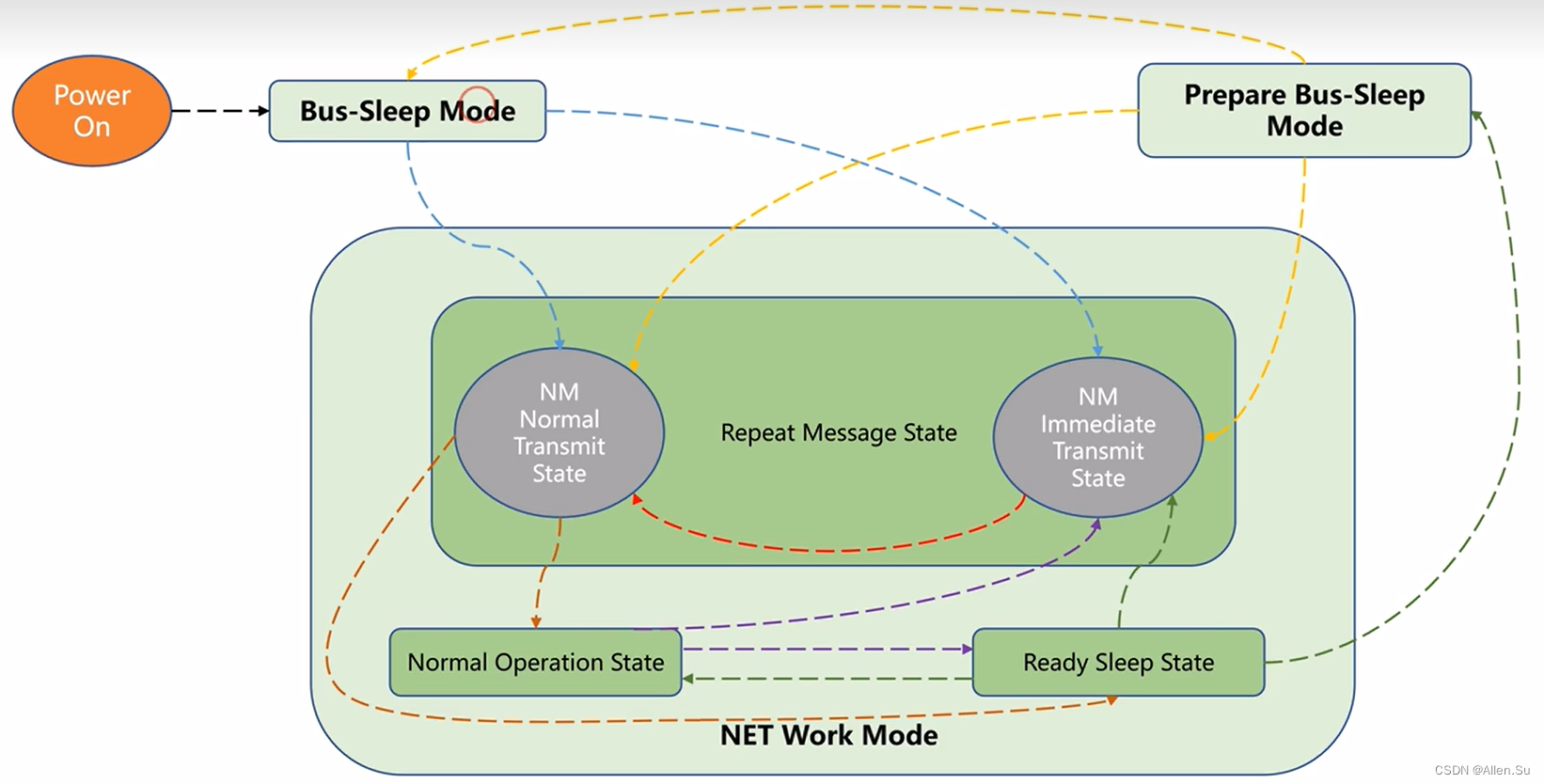
网络管理状态机:
 网络管理状态机切换:
网络管理状态机切换:
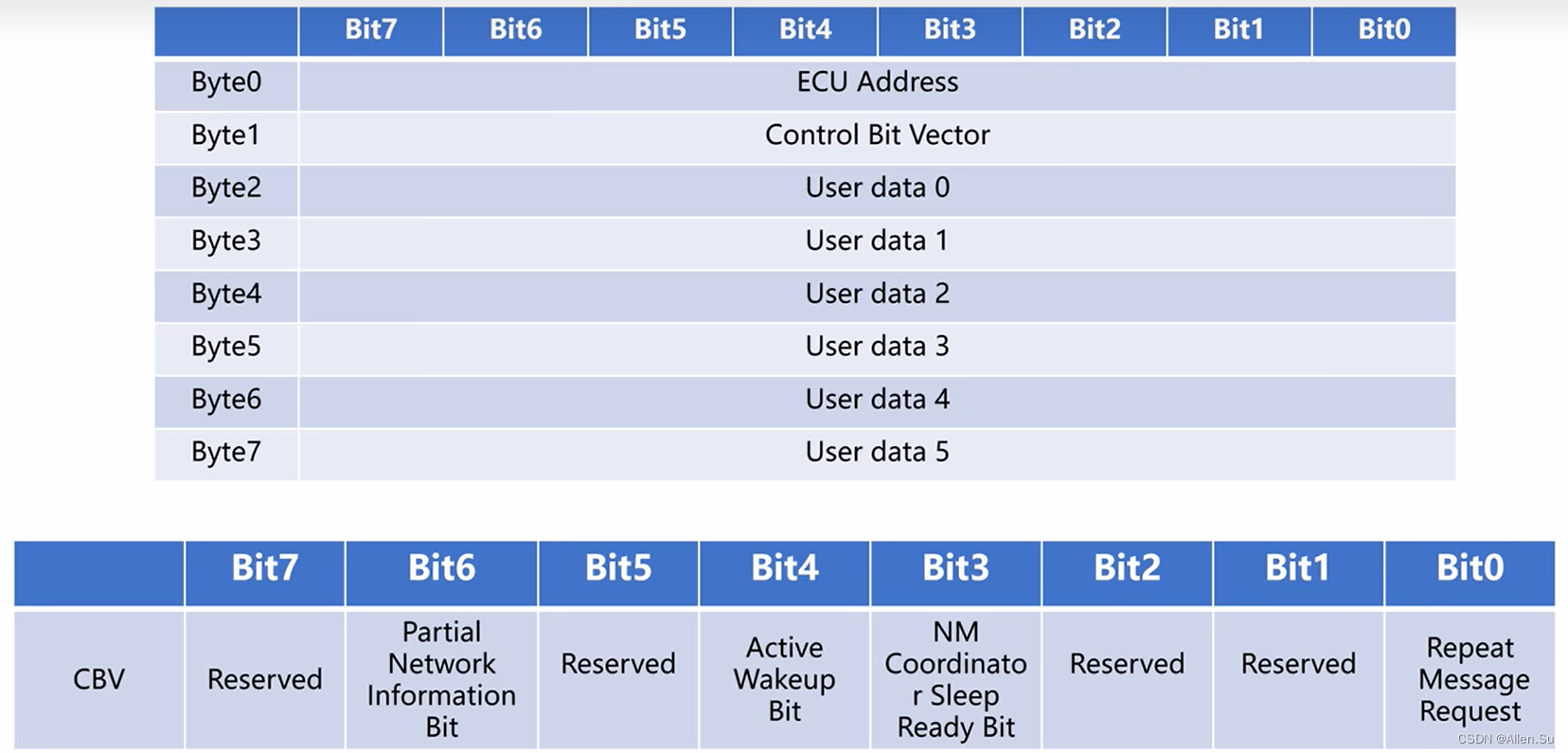
网络管理报文:
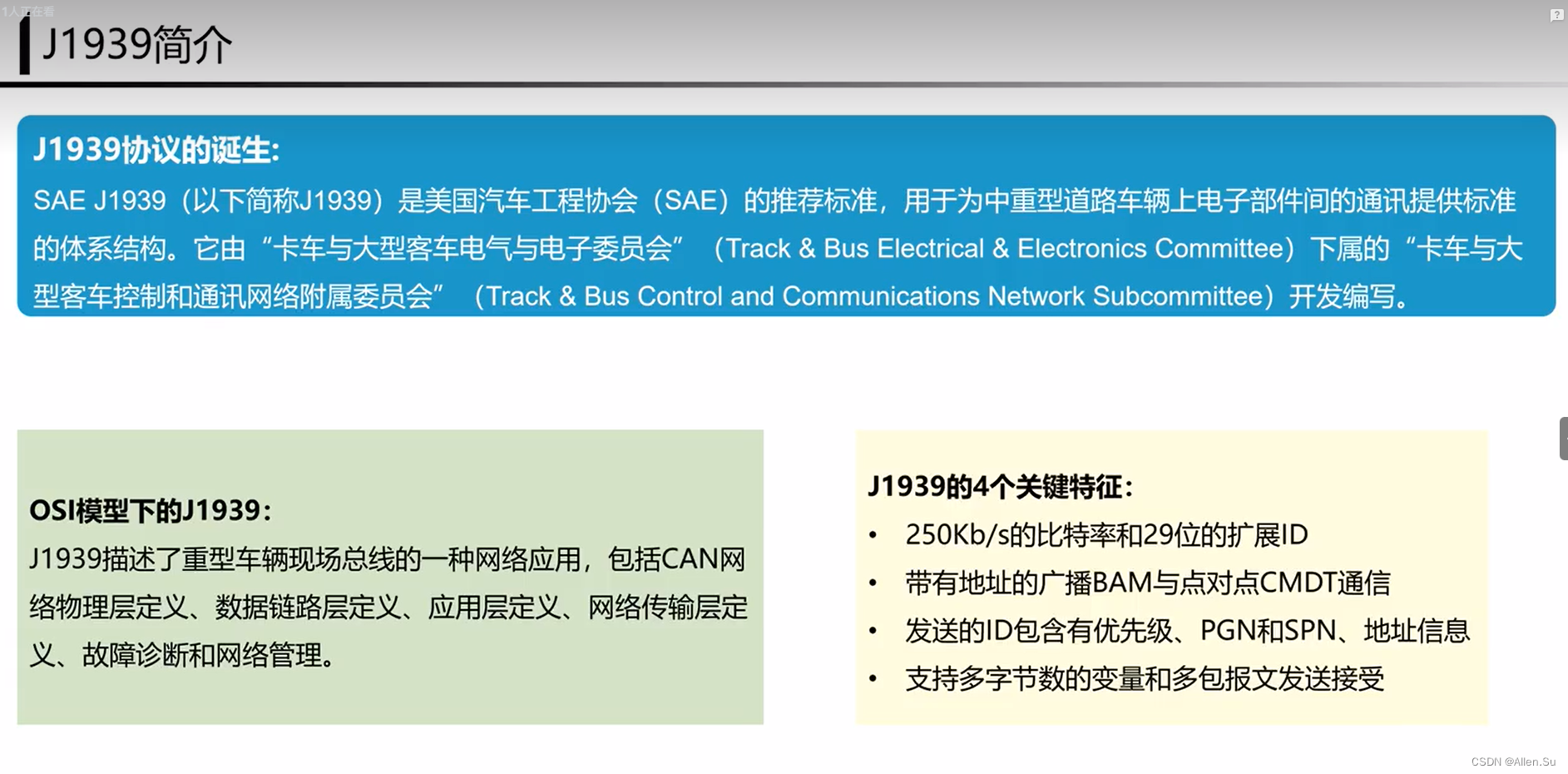
六、J1939协议

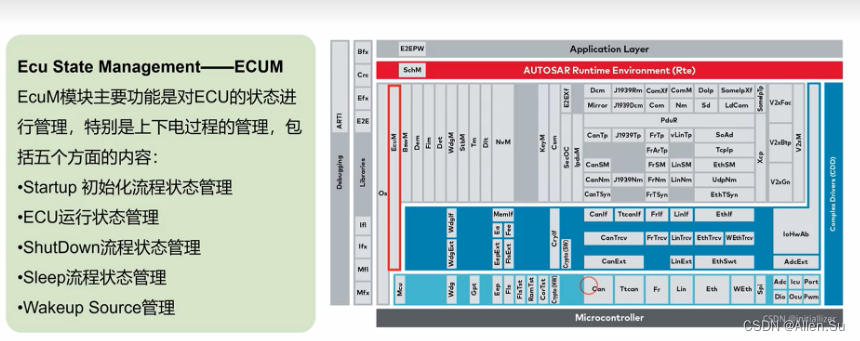
六、ECUM
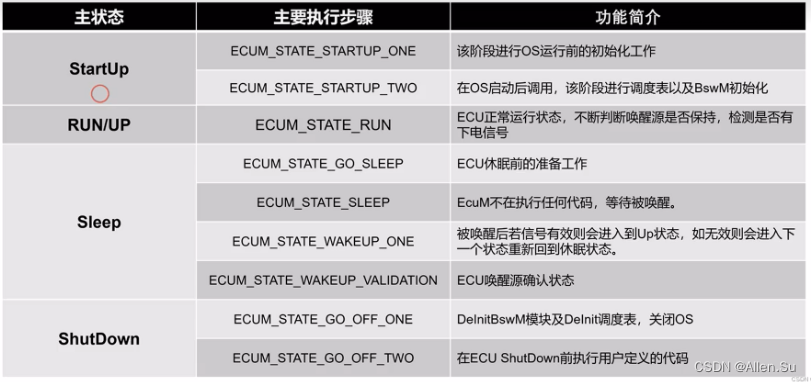
ECUM状态机:
ECUM状态调度: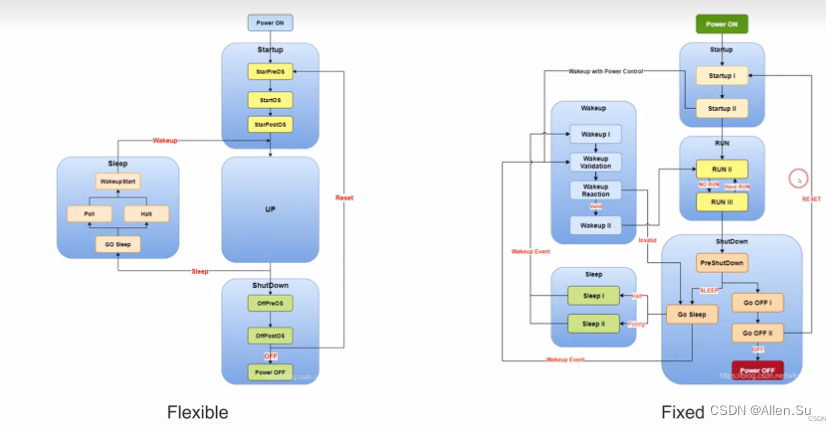
ECU启动方法:

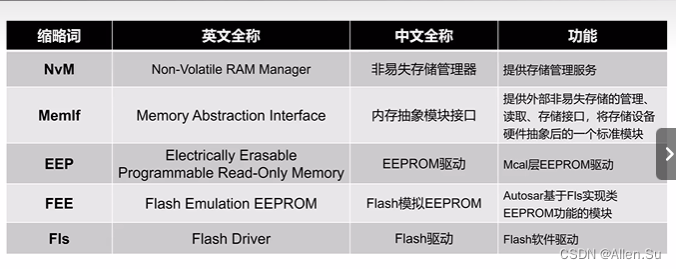
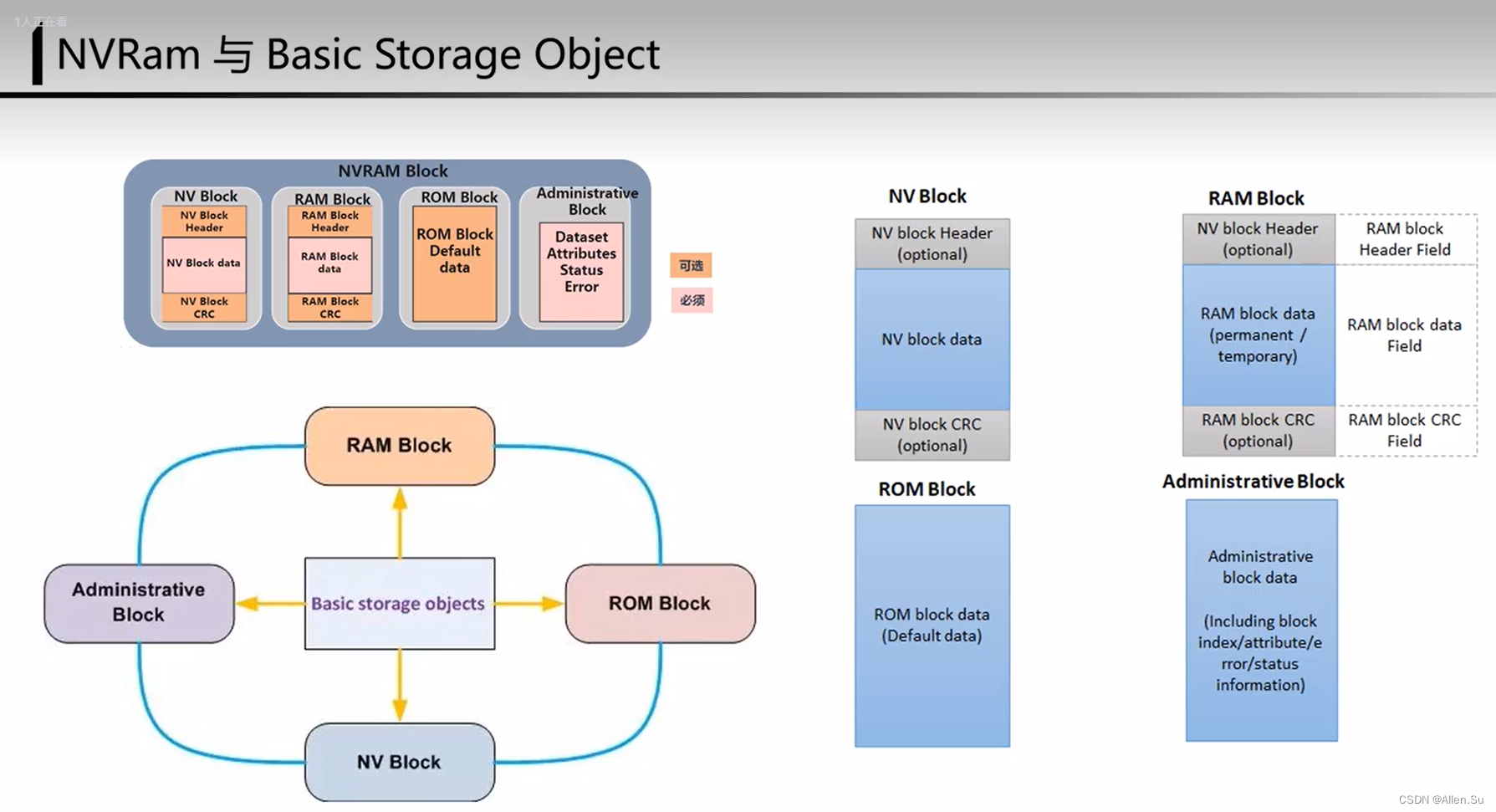
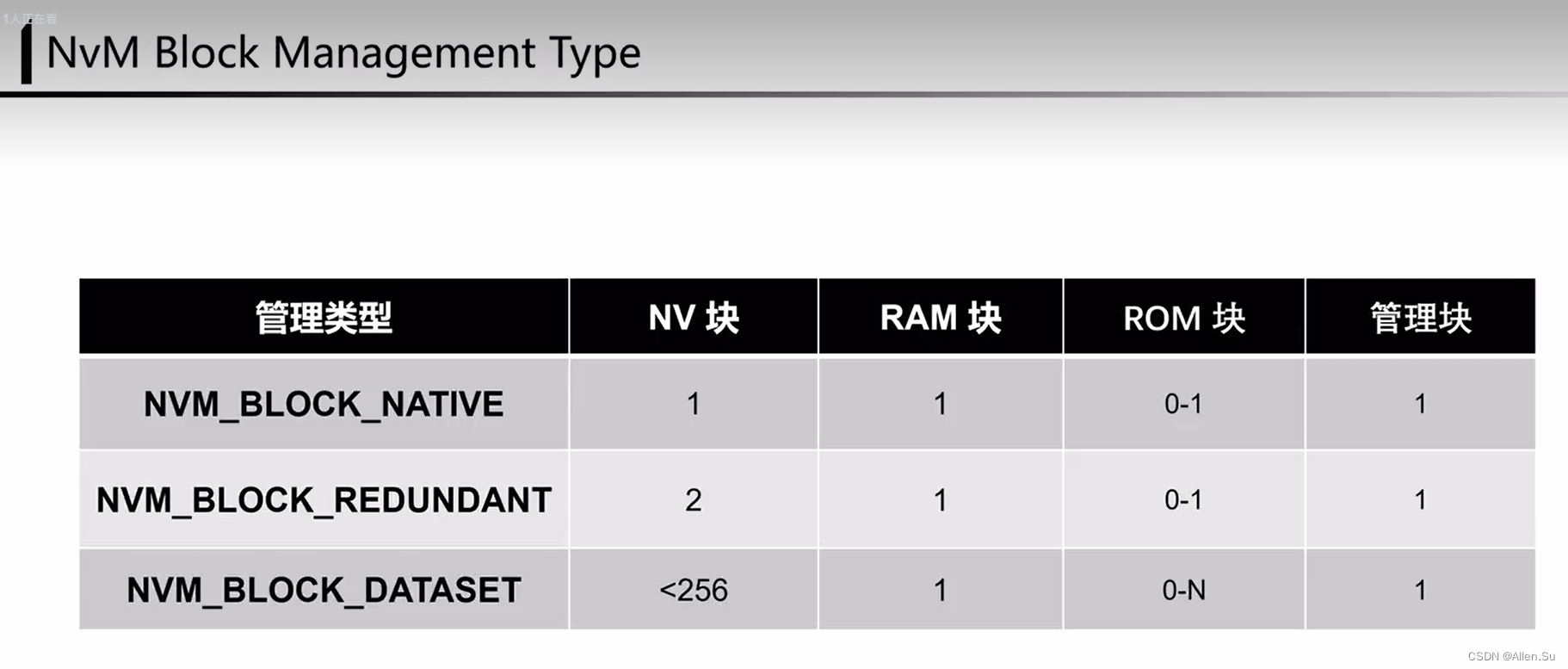
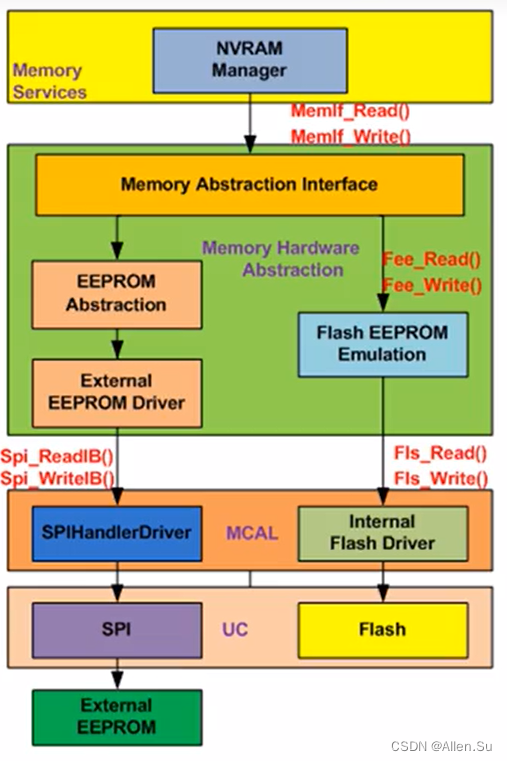
七、存储栈
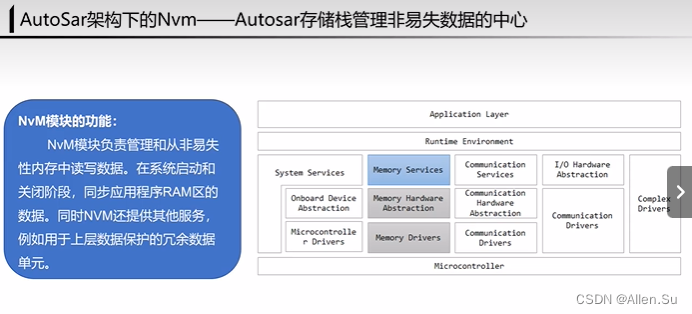
内存栈的数据传输过程
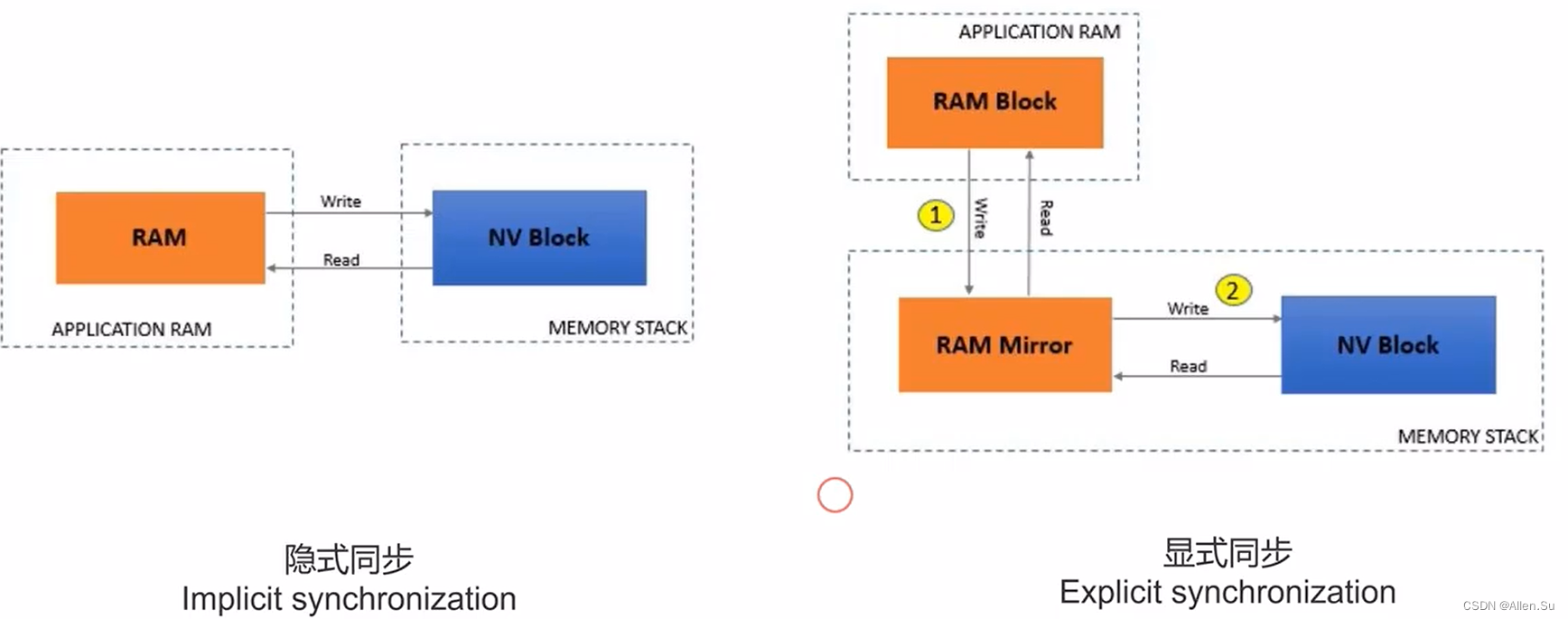
NVM的数据同步机制
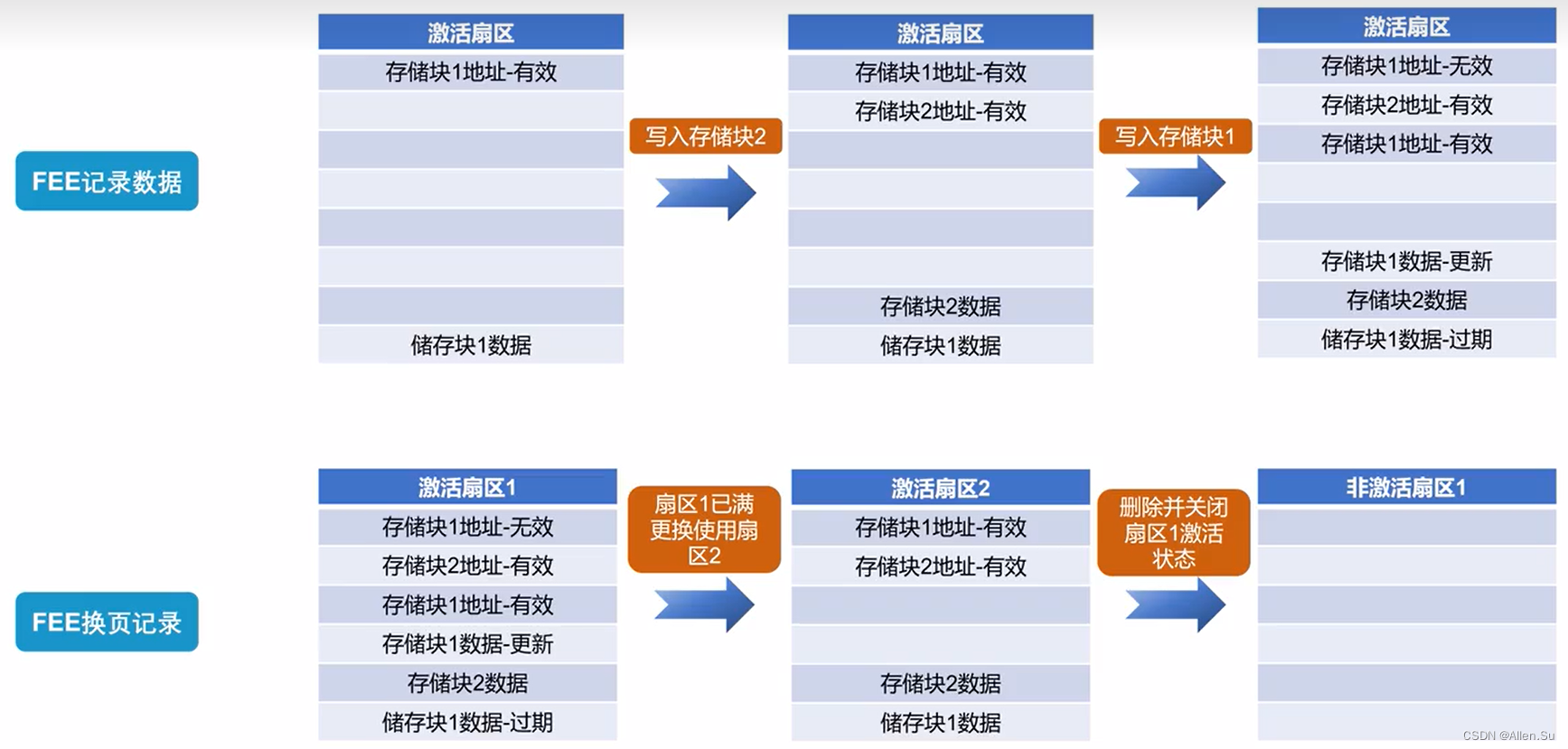
FEE模块与FEE的机制
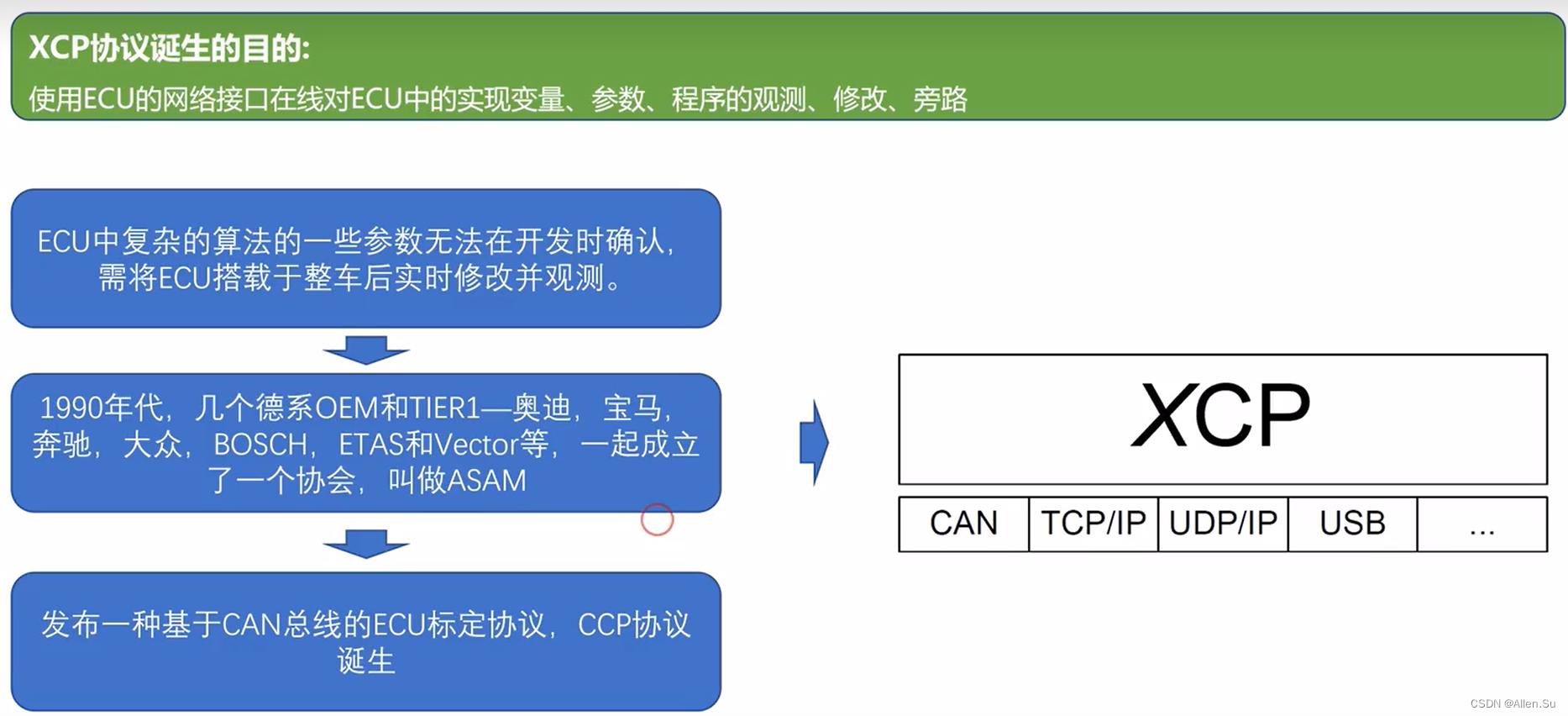
八、XCP
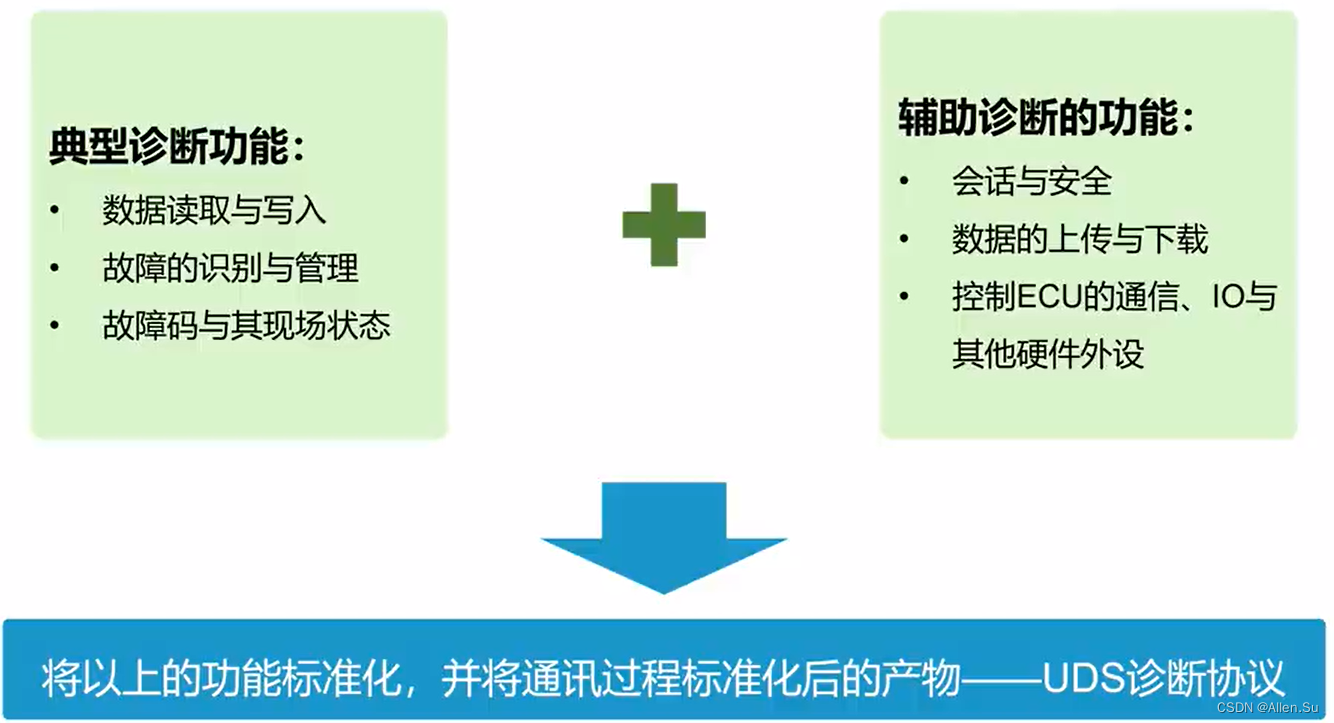
九、诊断

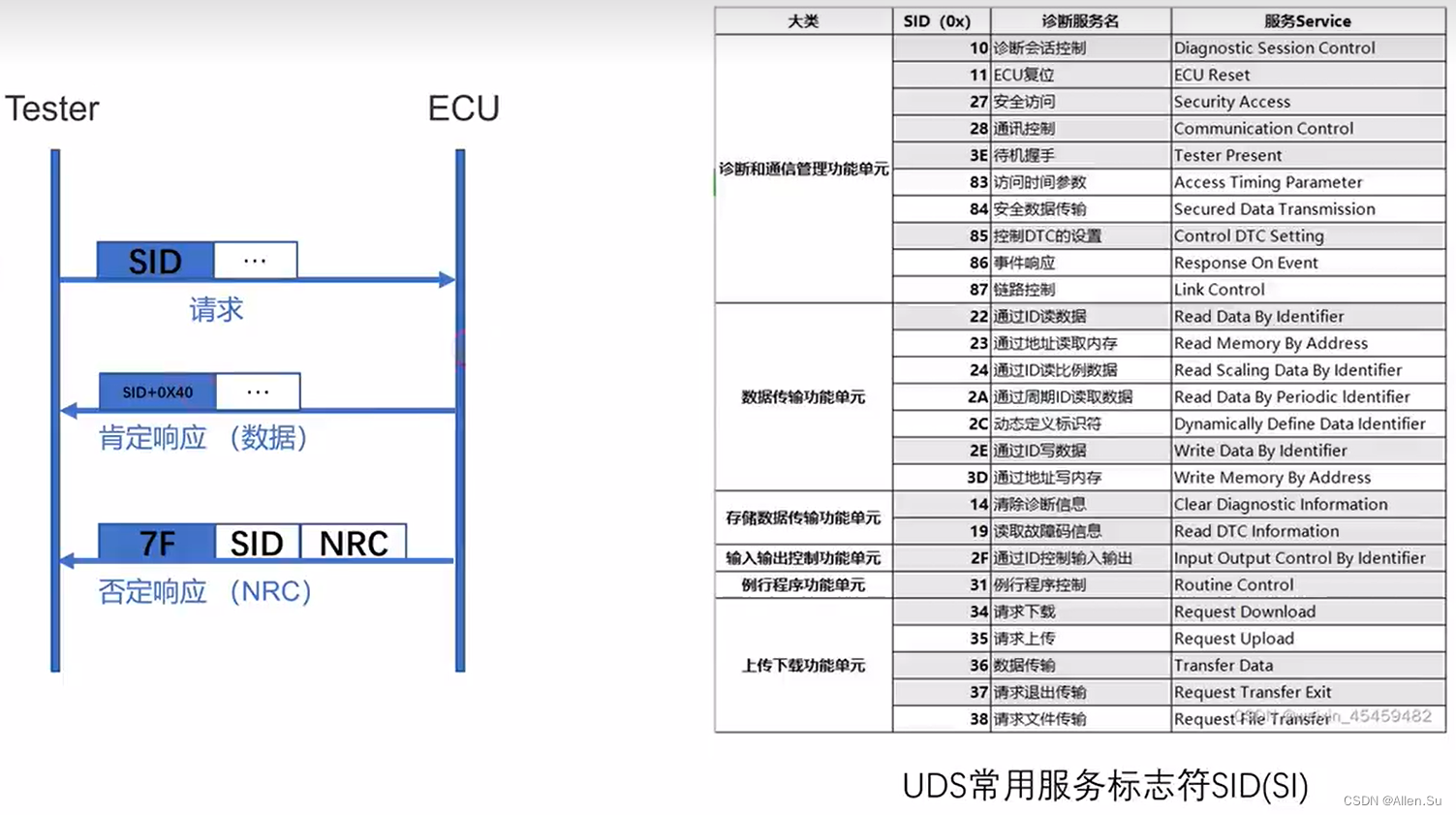
UDS
UDS主要对车载电子控制单元提供统一的诊断功能,采用ISO 14229约束的一种汽车通用诊断协议。可在不同的汽车总线(例如CAN,LIN,Flexray,Ethernet和K-line)上实现。
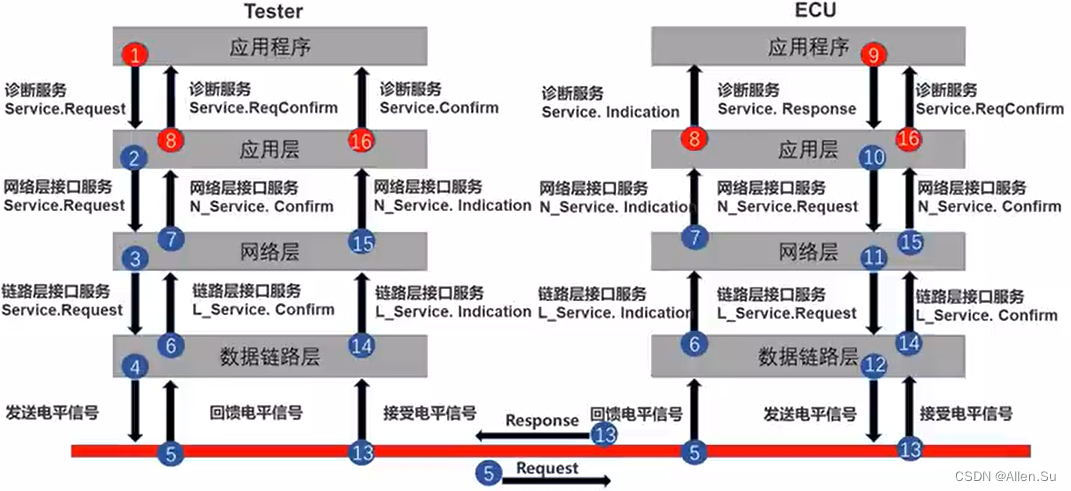
诊断数据传输过程
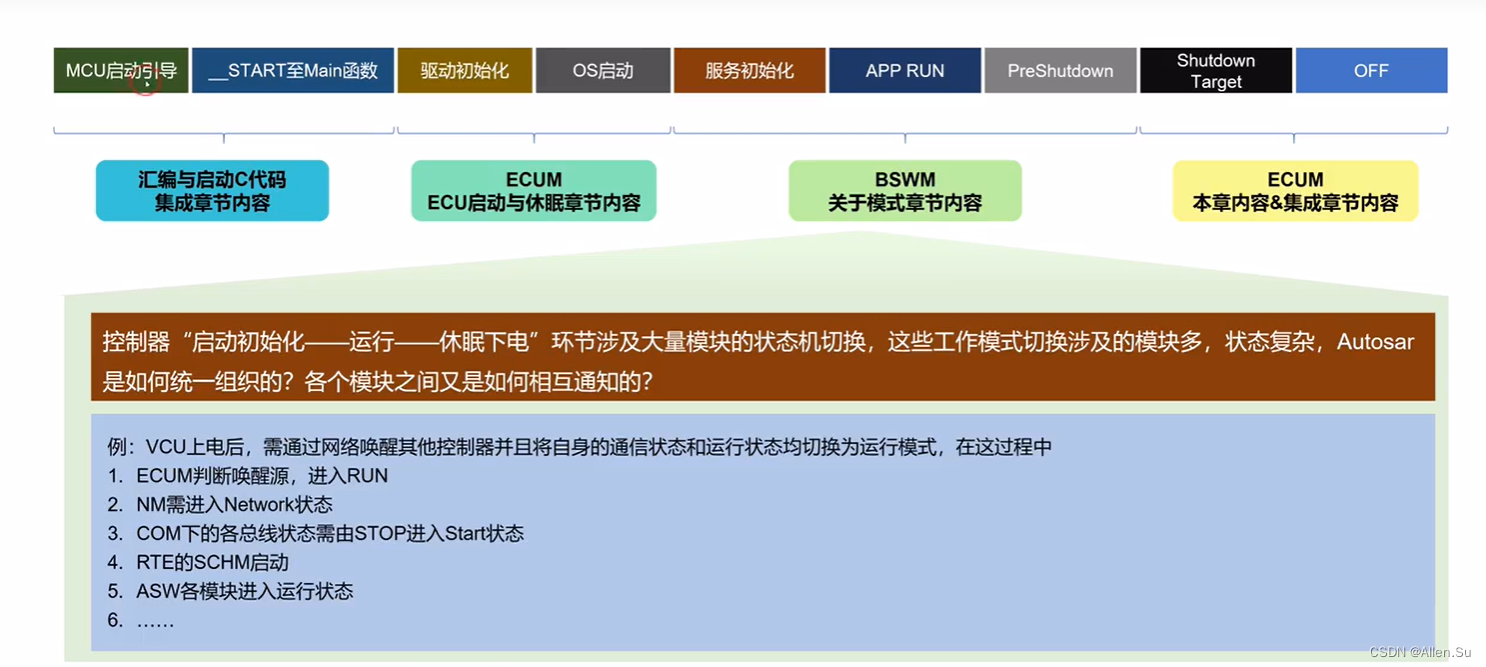
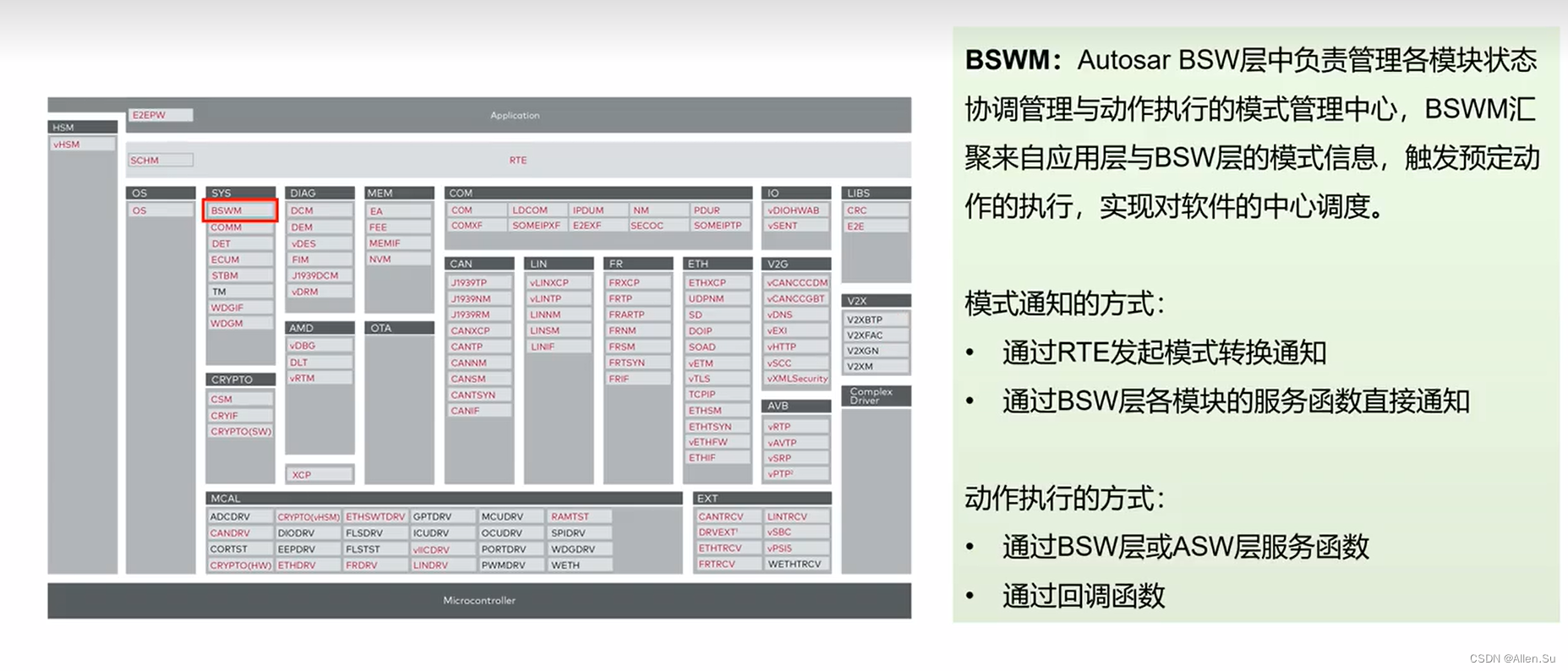
十、模式配置
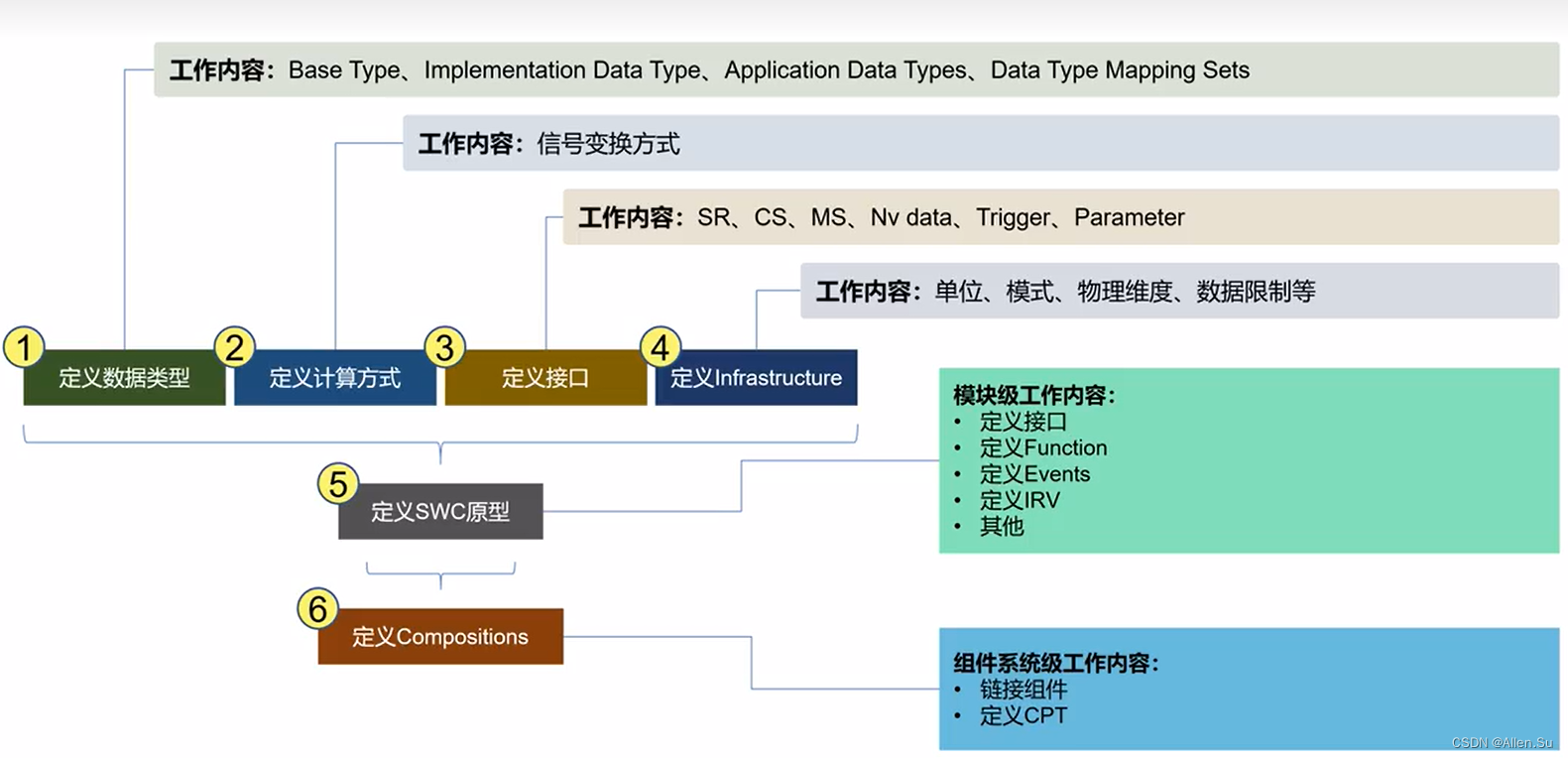
十一、ASW层
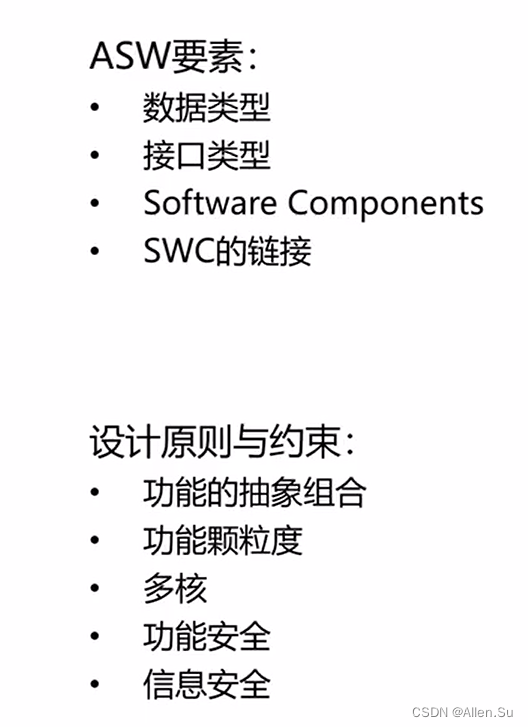
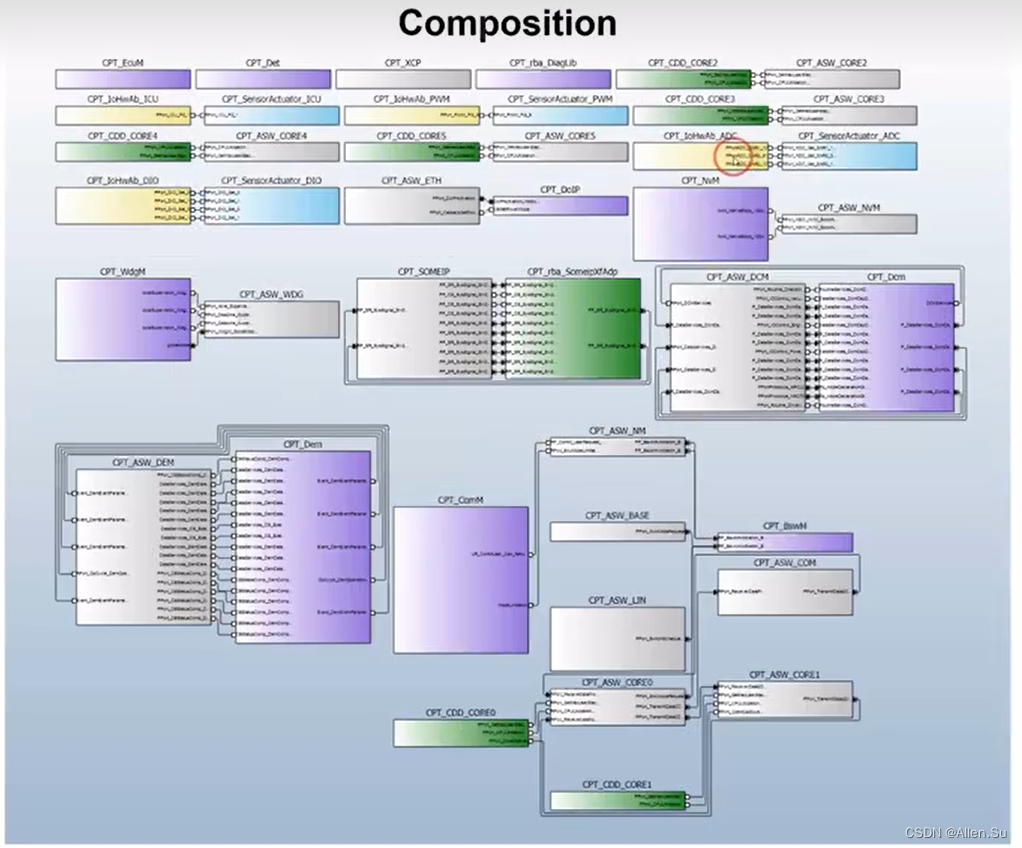
ASW层的工作内容
十二、系统描述
系统映射

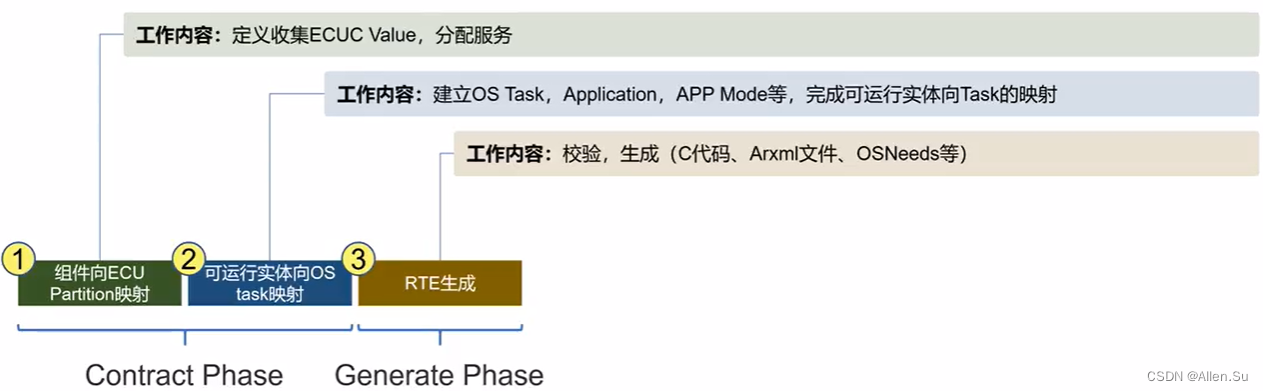
十三、RTE 是VFB的实现
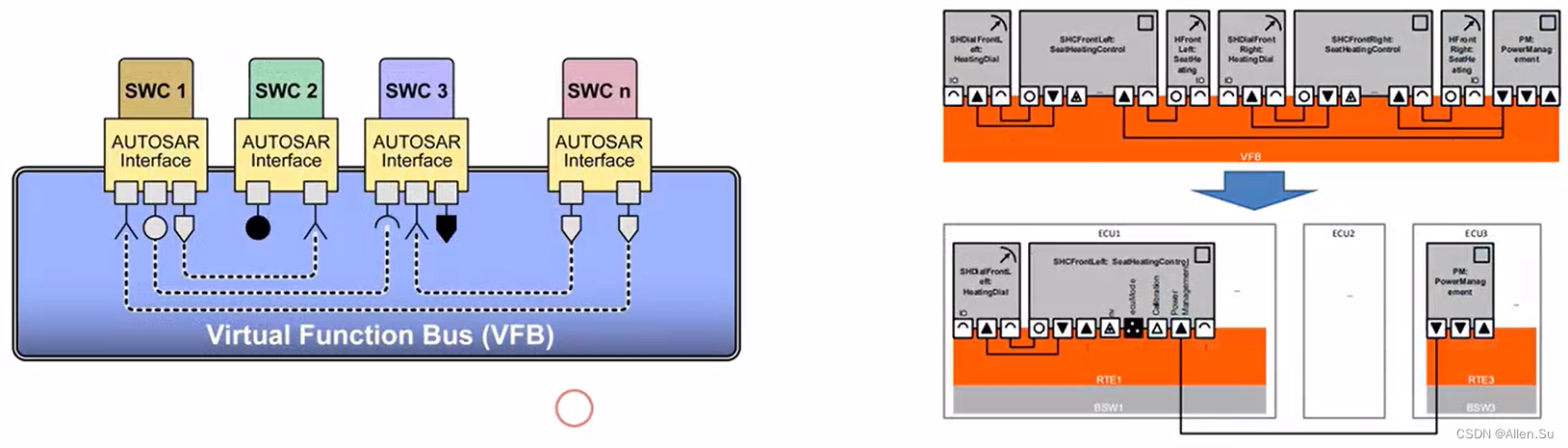
RTE 的工作流与工作内容
十四、 OS的必要性
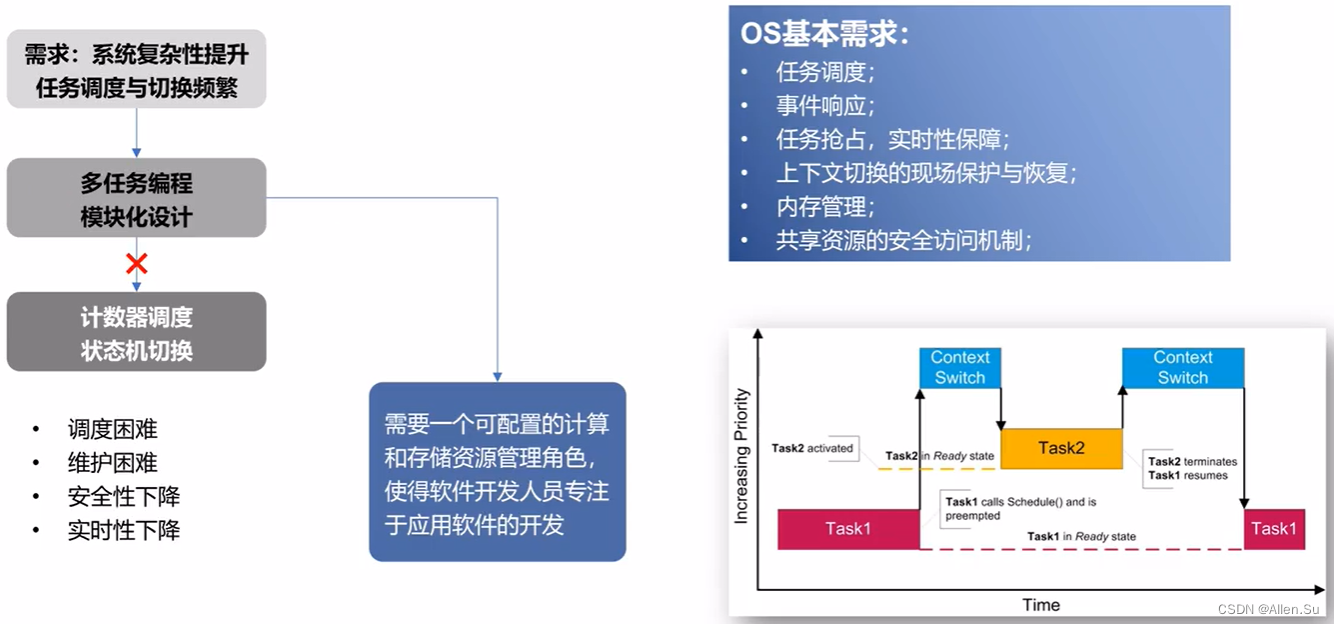
OS
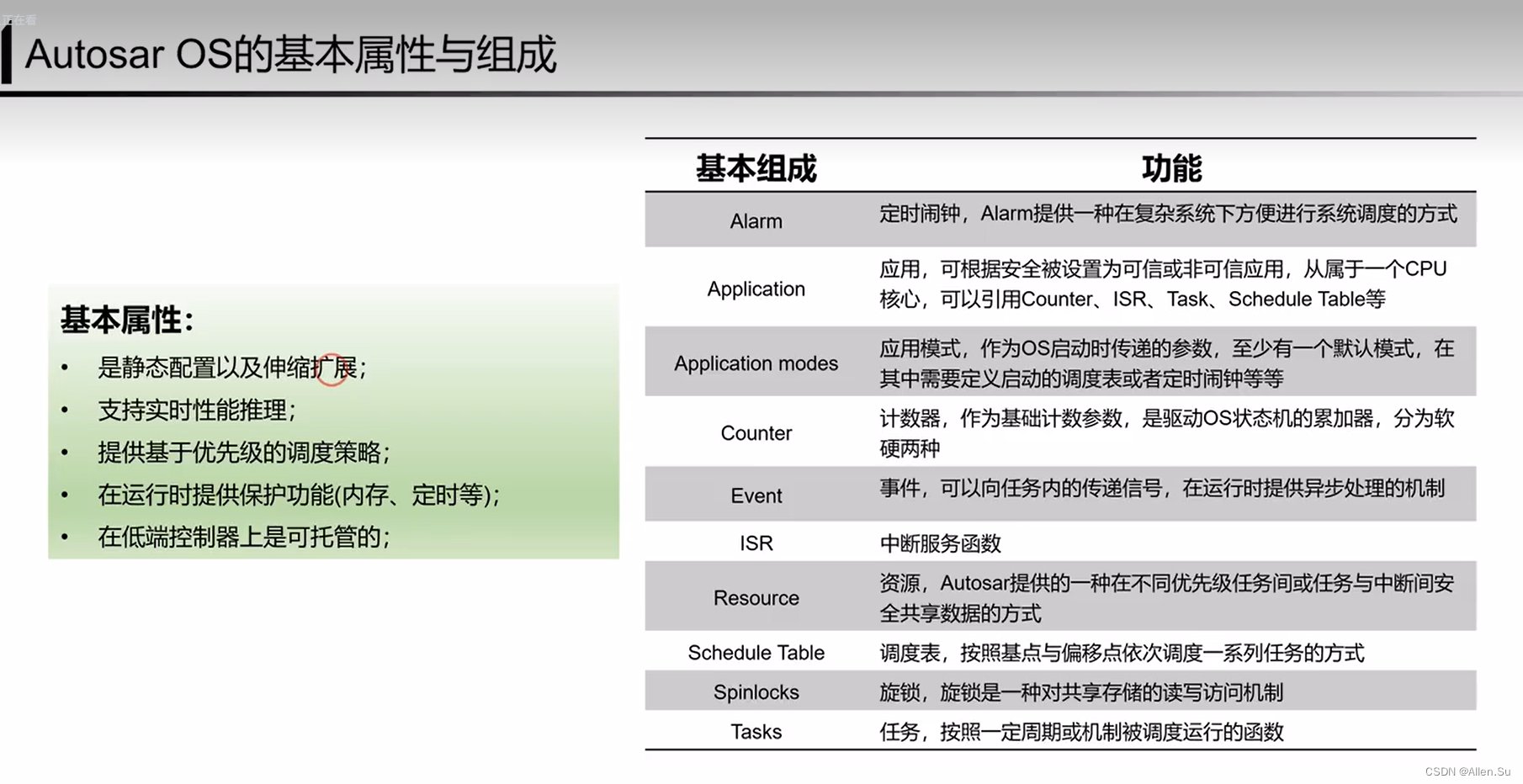
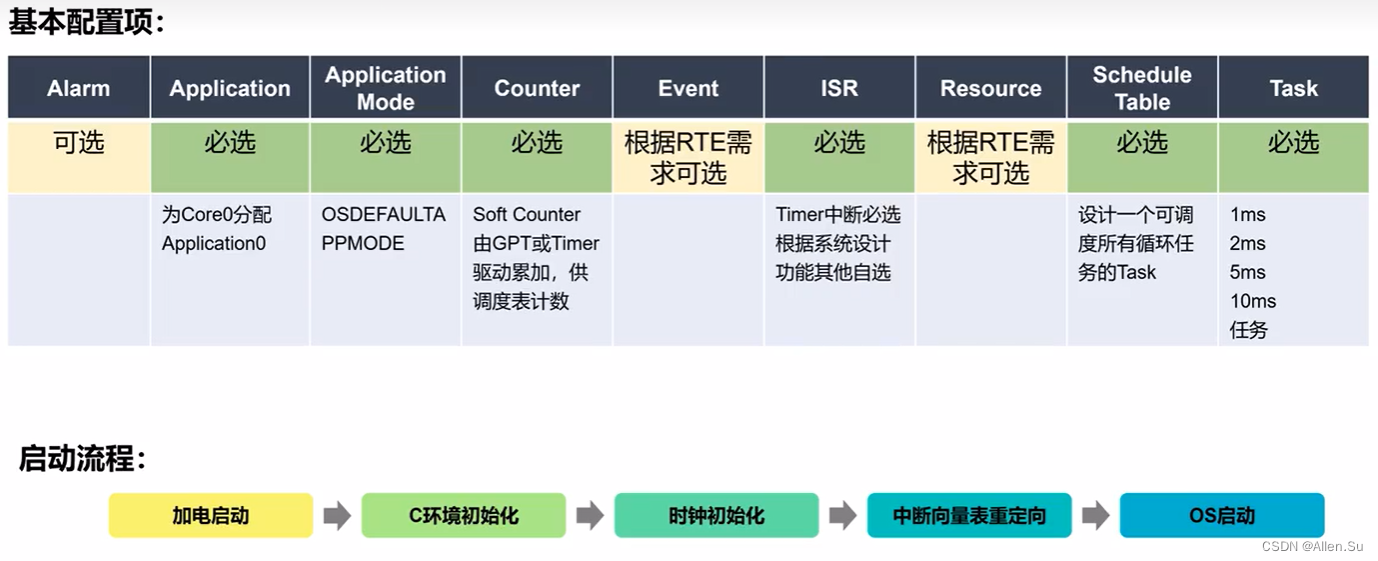
设计一个最小的AutoSar OS
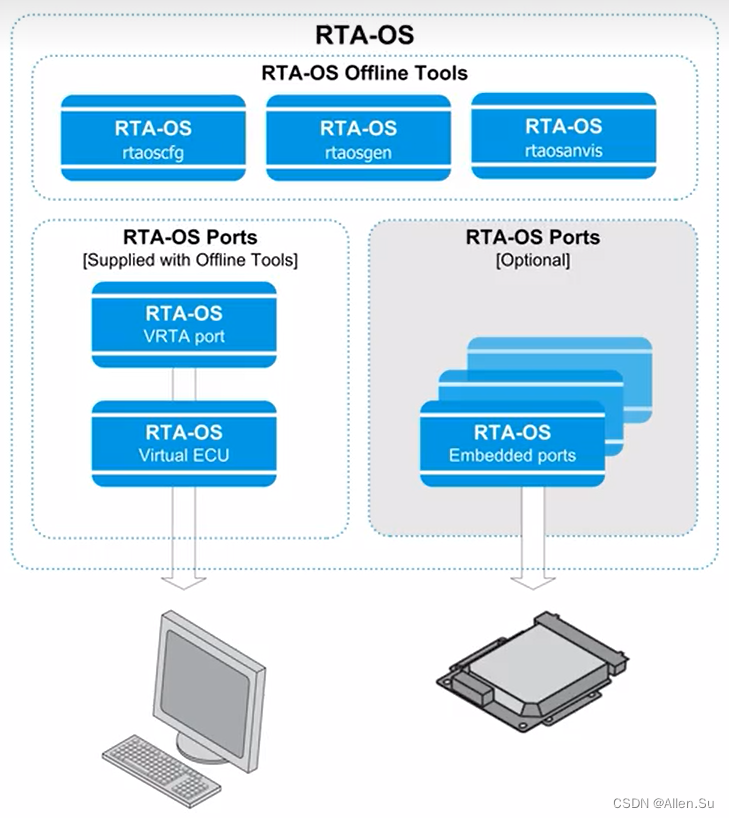
RTA OS安装与组成
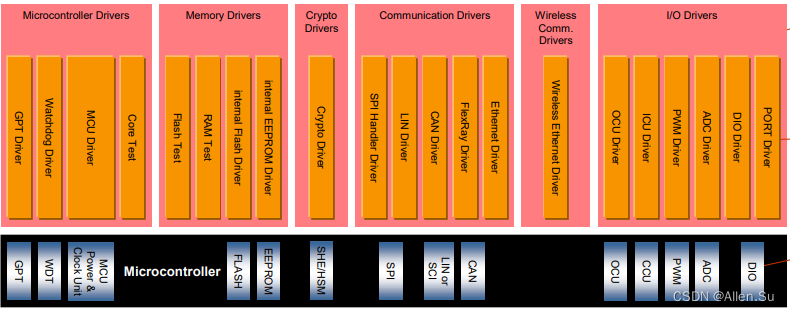
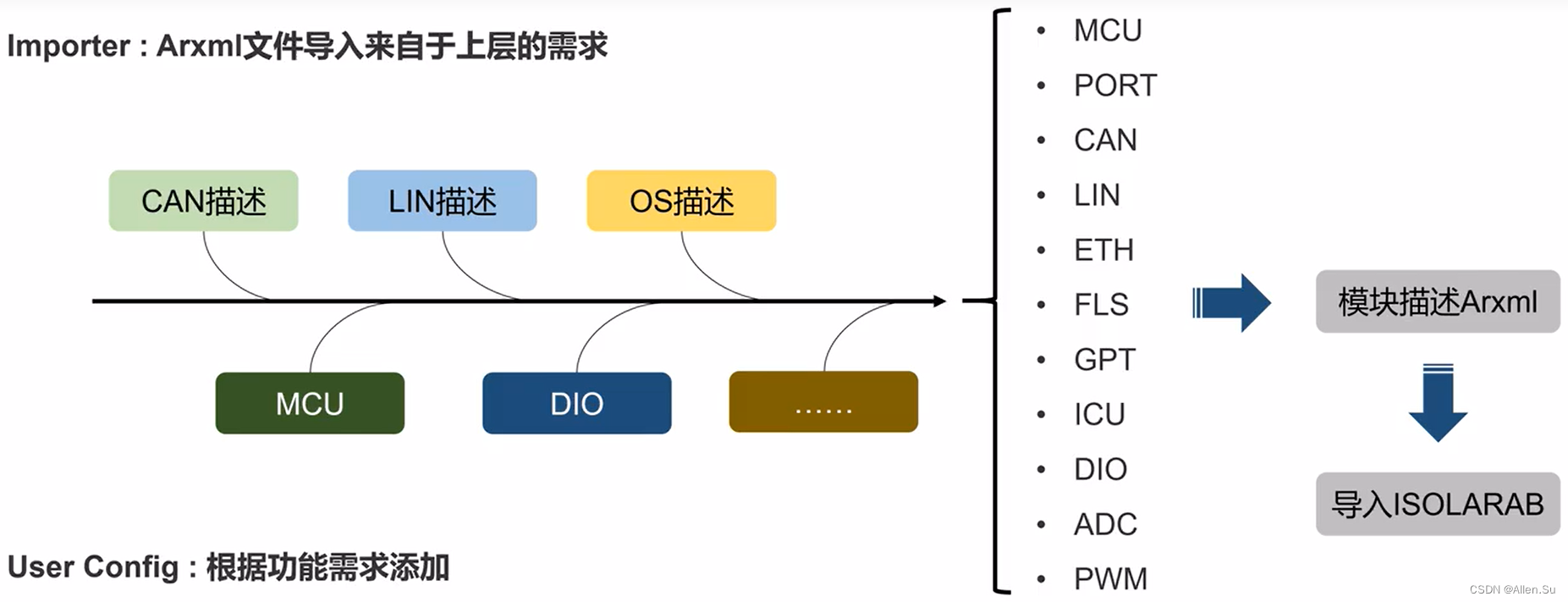
十五、MCAL简介与驱动分类
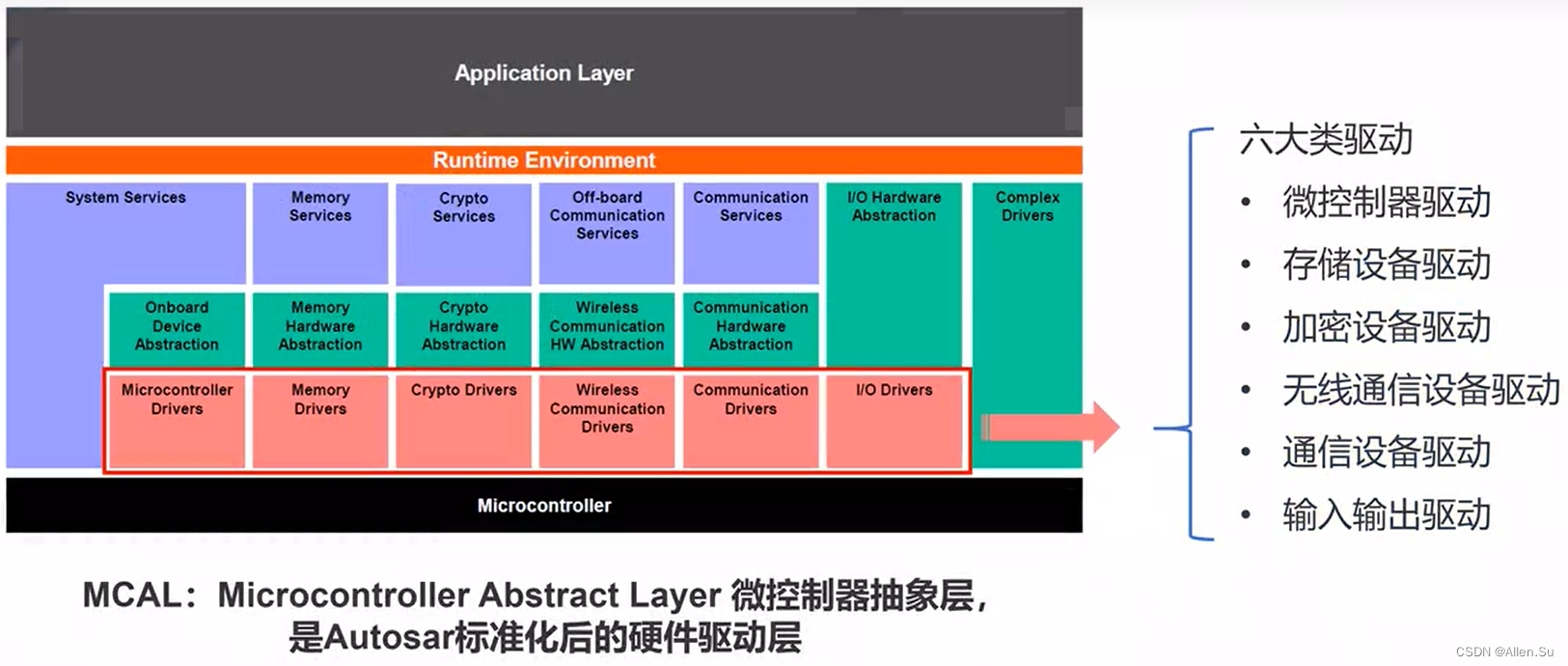
MCAL配置方式与流程
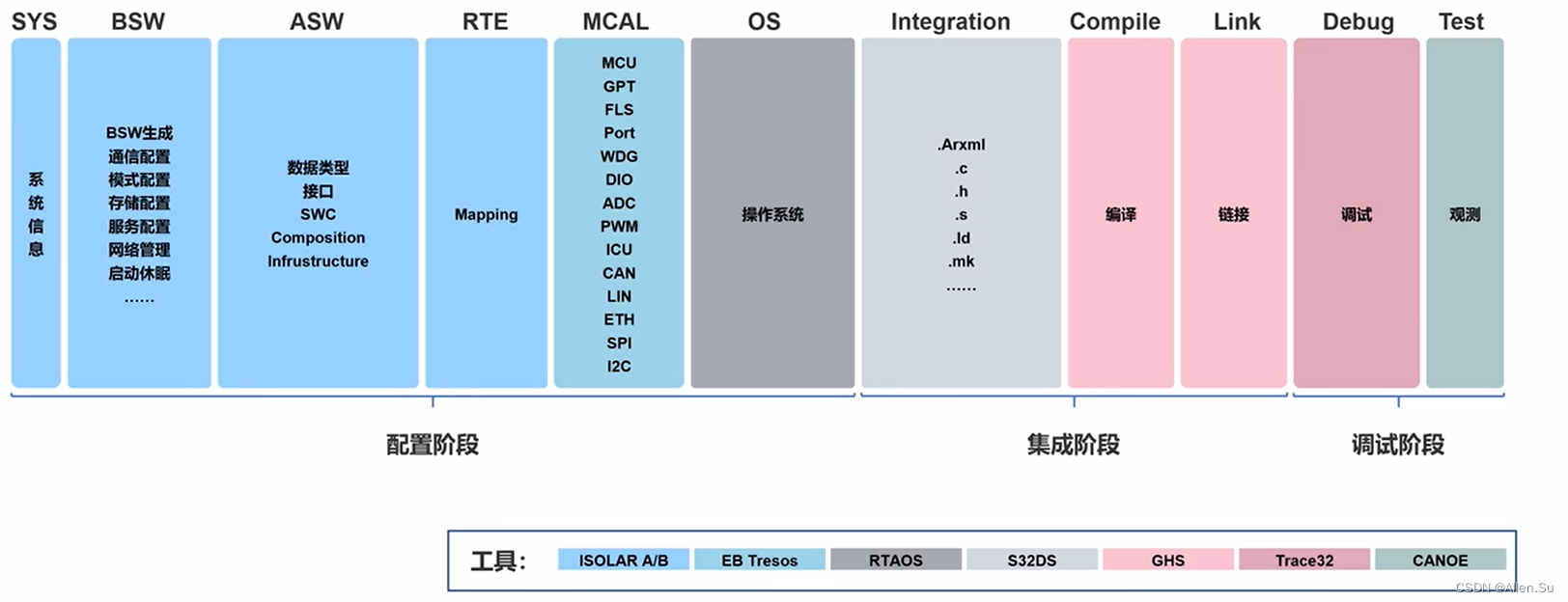
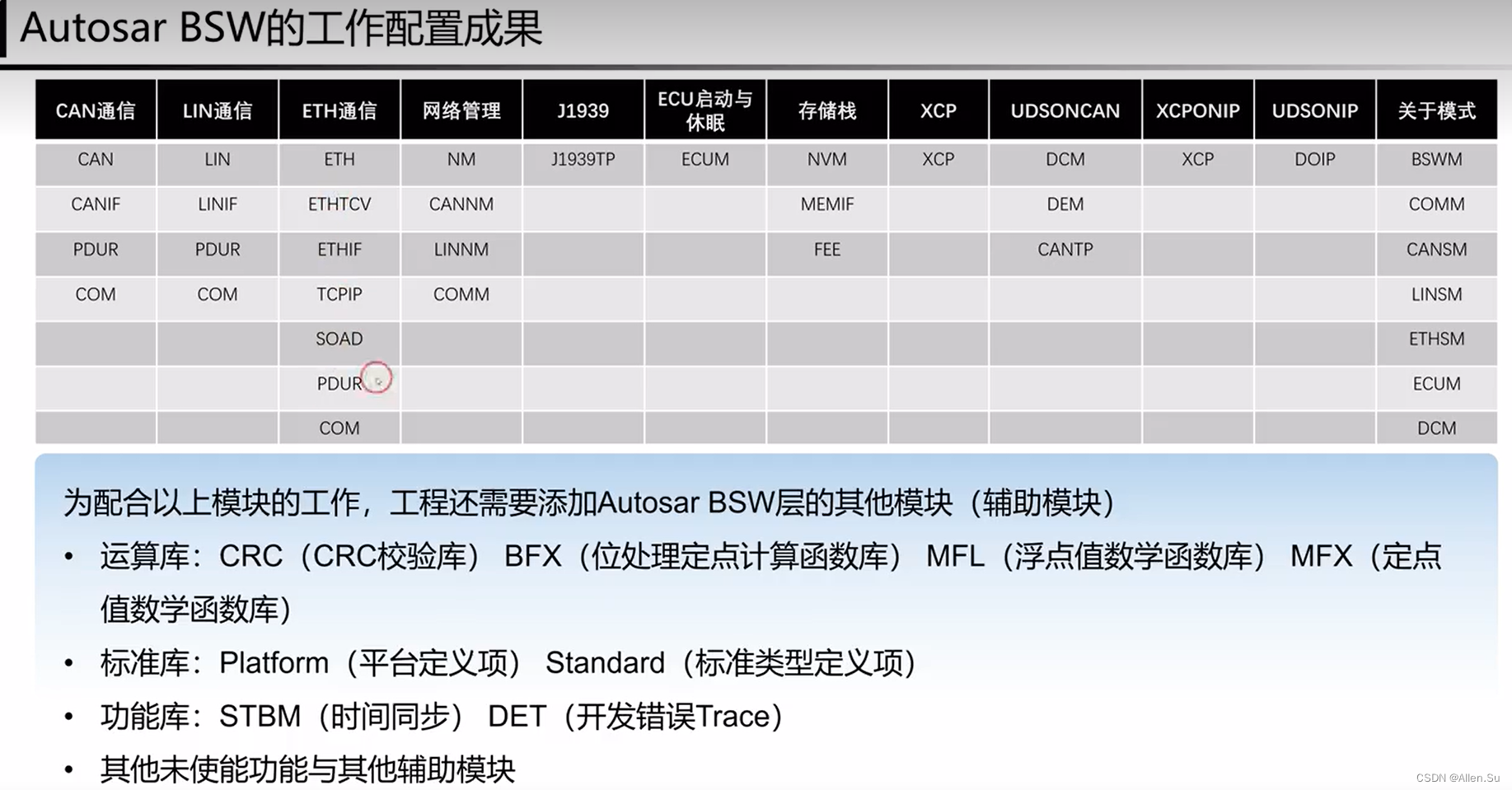
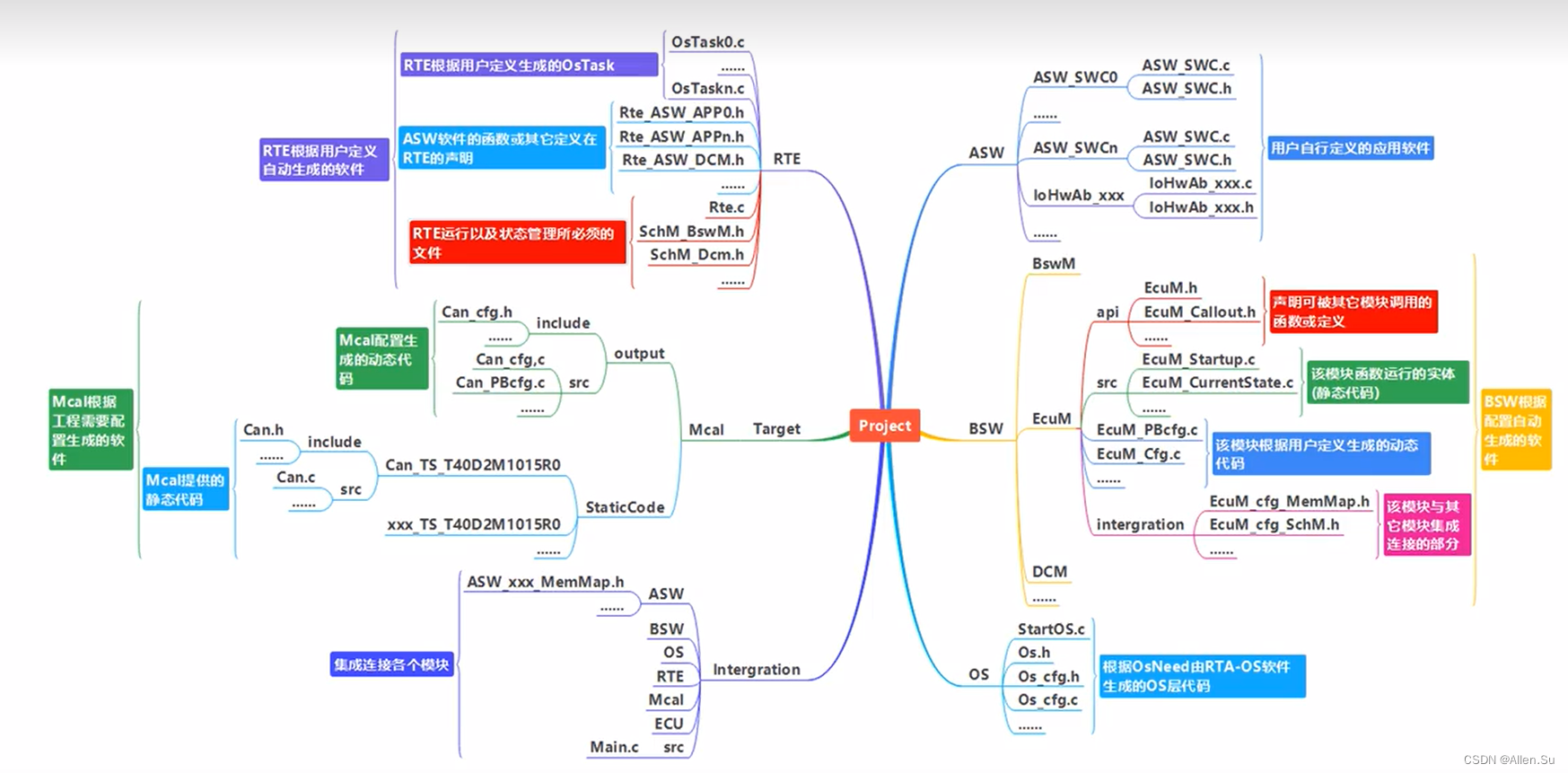
十六、集成与编译
典型的工程文件集成树
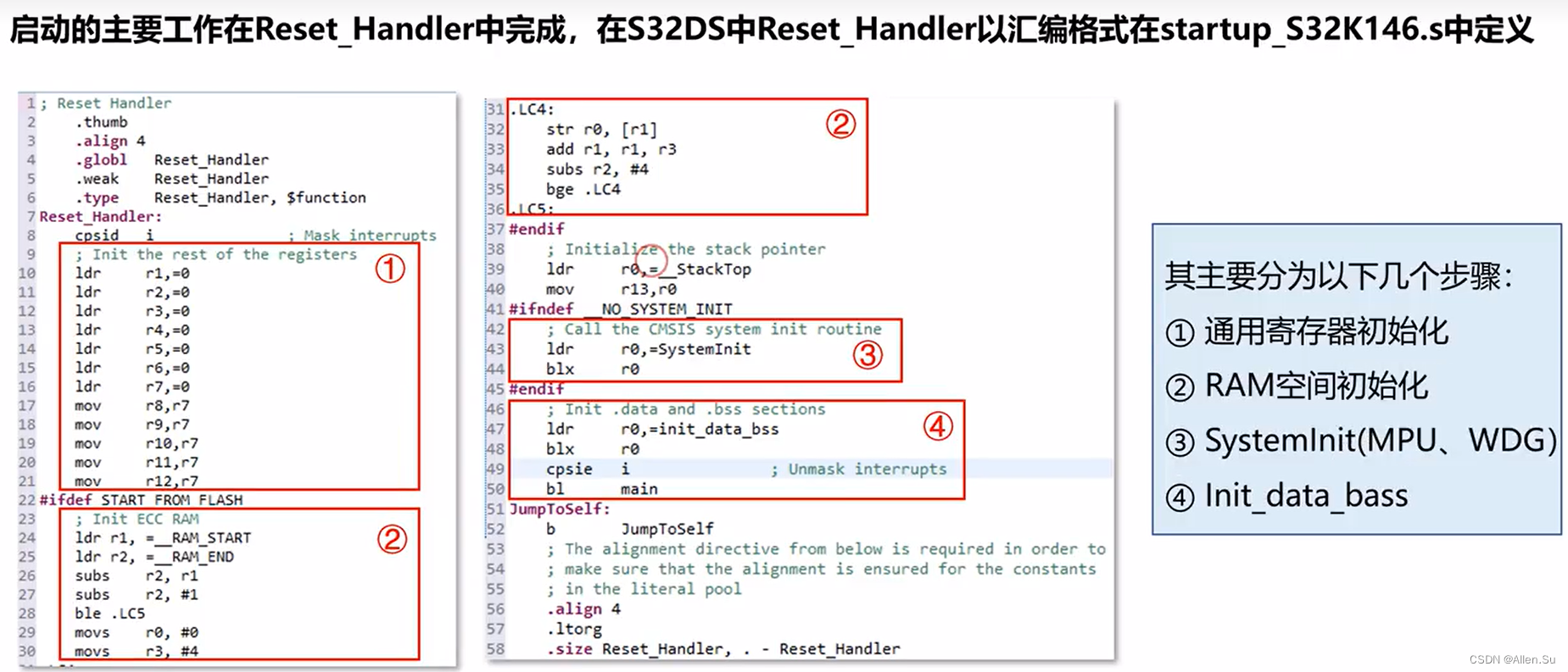
启动过程
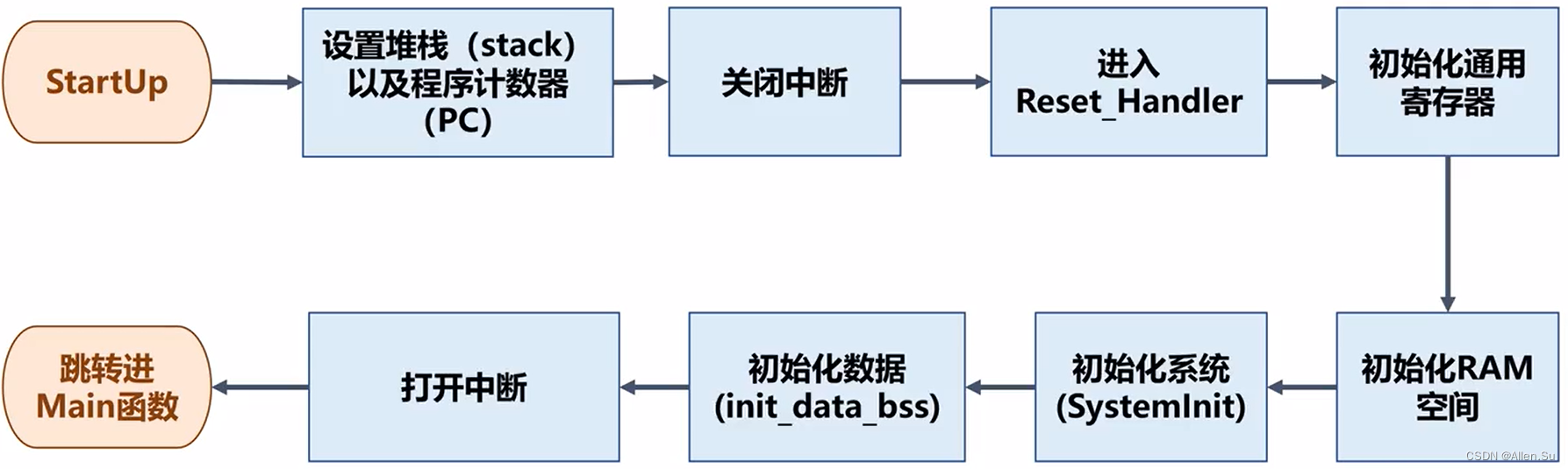
Reset_Handler



![[自学记录06|*Animation]四元数、死锁与方位插值](https://img-blog.csdnimg.cn/55dbb247a82d494fa757741ba07bd1ec.png)