realman——基于SDK的pick_and_place
news2026/2/14 8:20:28
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1095575.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Vue-3.3ESLint
ESLint代码规范
代码规范:一套写代码的约定规则。
JavaScript Standard Style规范说明https://standardjs.com/rules-zhcn.html
代码规范错误
如果你的代码不符合standard的要求,ESlint会跳出来提醒。
比如:在mian.js中随意做一些改动&a…

【AI视野·今日Sound 声学论文速览 第二十三期】Wed, 11 Oct 2023
AI视野今日CS.Sound 声学论文速览 Wed, 11 Oct 2023 Totally 14 papers 👉上期速览✈更多精彩请移步主页 Daily Sound Papers
AutoCycle-VC: Towards Bottleneck-Independent Zero-Shot Cross-Lingual Voice Conversion Authors Haeyun Choi, Jio Gim, Yuho Lee, Y…
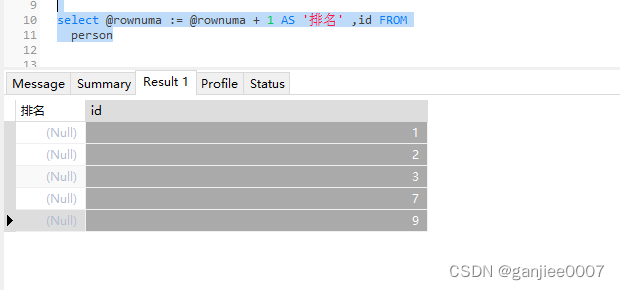
【mysql】Mysql自定义变量 @rownum使用
Mysql自定义变量 rownum
这个可以赋值?这是初始化? 先看表结构 有五条数据。执行前半段语句发现。rownum的起始值等于行数 这里from后面可以加person与 r这连个组成 如果这里的rownum打错了呢。发现这个变量就没有初始值。
可见,没有必要…

C++指针解读(6)-- 指针和字符串
1、字符串的基本概念
(1)字符串的存储
字符串是存放在字符数组中的。比如字符串“hello”,在内存中是这么存放的: 这里要注意,在字符串的最后会加上一个\0,也被称为NUL字符,表示字符串的结束位…

【算法训练-排序算法 三】【排序应用】合并区间
废话不多说,喊一句号子鼓励自己:程序员永不失业,程序员走向架构!本篇Blog的主题是【合并区间】,使用【数组】这个基本的数据结构来实现,这个高频题的站点是:CodeTop,筛选条件为&…
闪电藤文件传输助手上线
官网 临时官网:https://lightningvine.zishu.life/ 正式官网(备案中):lightningvine.cn 简介 闪电藤是基于LocalSend二次开发的一款局域网文件传输工具,完全兼容LocalSend,在它的基础上进行UI交互的重新设计…


在 VSCode 中使用 PlantUML
最近,因为工作需要绘制一些逻辑图,我自己现在使用的是 PlantUML 或者 mermaid,相比之下前者更加强大。不过它的环境也麻烦一些,mermaid 在一些软件上已经内置了。但是 PlantUML 一般需要自己本地安装或者使用远程服务器࿰…

计算机毕业设计-开题报告答辩常见问题!Javaweb项目答辩
🍊作者:计算机编程-吉哥 🍊简介:专业从事JavaWeb程序开发,微信小程序开发,定制化项目、 源码、代码讲解、文档撰写、ppt制作。做自己喜欢的事,生活就是快乐的。 🍊心愿:点…
2023年厦门市高等职业院校技能竞赛软件测试竞赛规程
2023年厦门市高等职业院校技能竞赛 软件测试竞赛规程 一、赛项名称 赛项名称:软件测试 竞赛形式:团体赛 赛项专业大类:电子信息 二、竞赛目的 (一)检验教学成效 本赛项竞赛内容以《国家职业教育改革实施方案》为设计方…
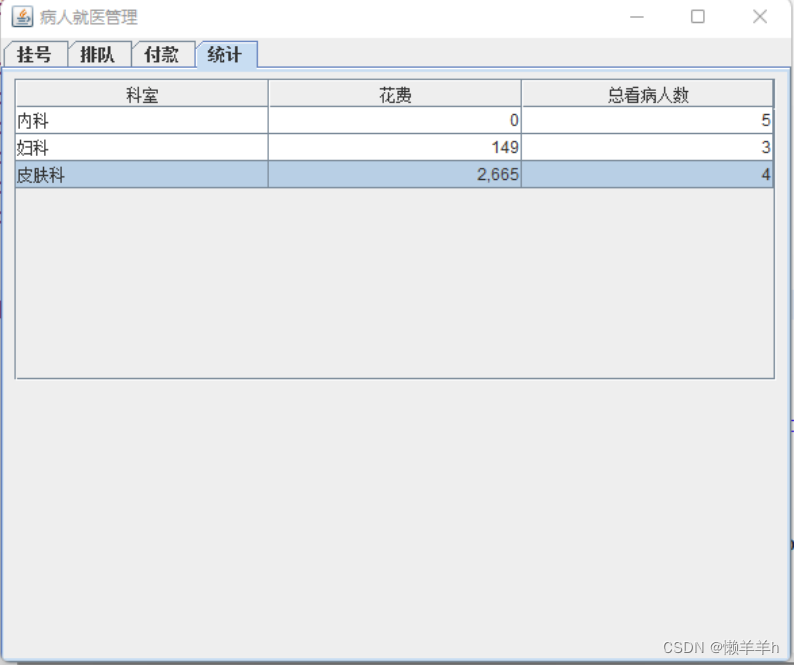
Java Swing医院就诊预约系统
一、系统概述
本系统是一款使用Java Swing开发的医院就诊预约系统,面向医院的医务人员和患者使用。
系统功能:
患者管理:添加/编辑/查询/删除患者信息 医生管理:添加/编辑/查询/删除医生信息 科室管理:添加/编辑/查询/删除科室信息 预约登记:患者选择医生和日期进行预约 预约…
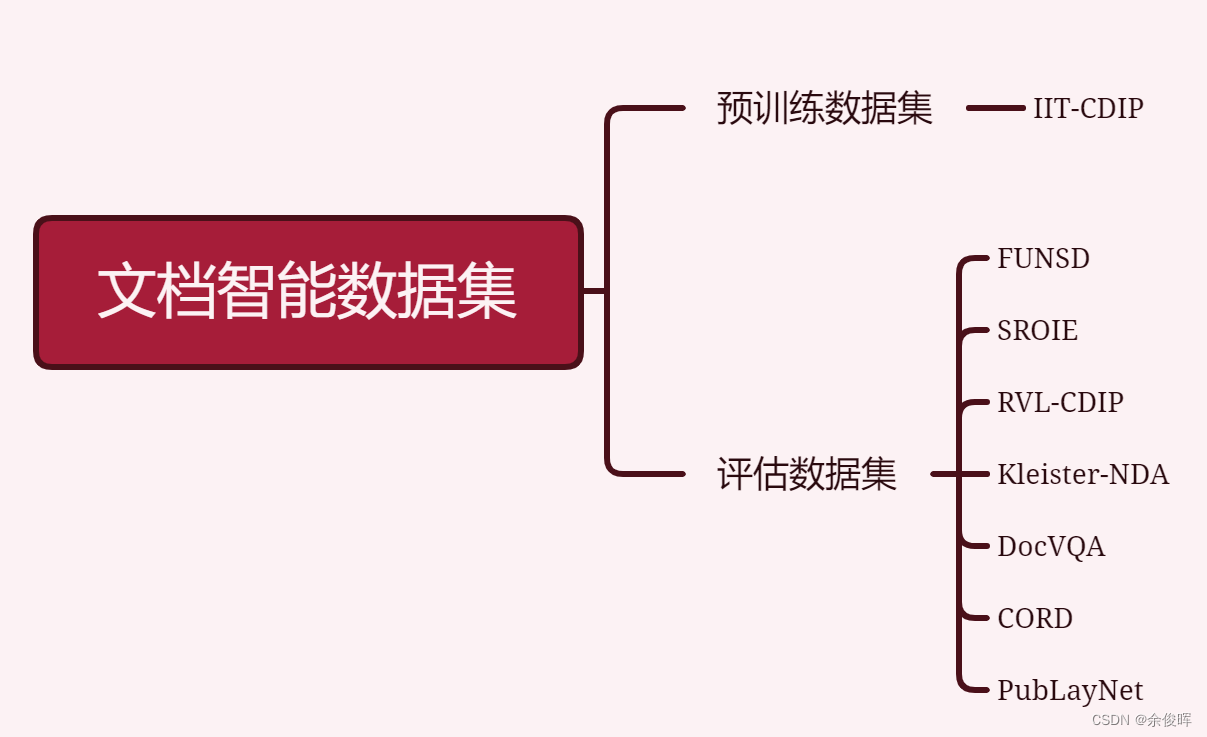
【文档智能】多模态预训练模型及相关数据集汇总
前言
大模型时代,在现实场景中或者企业私域数据中,大多数数据都以文档的形式存在,如何更好的解析获取文档数据显得尤为重要。文档智能也从以前的目标检测(版面分析)阶段转向多模态预训练阶段,本文将介绍目…
分享项目管理软件排行榜!
无论是大型企业还是小型团队,项目管理是企业不可或缺的一部分。一个好的项目管理软件可以帮助企业有效地规划和实施项目,对于团队成员来说,也可以更好地分配任务、查看进度和提高团队合作能力。面对众多的项目管理软件,如何选择适…
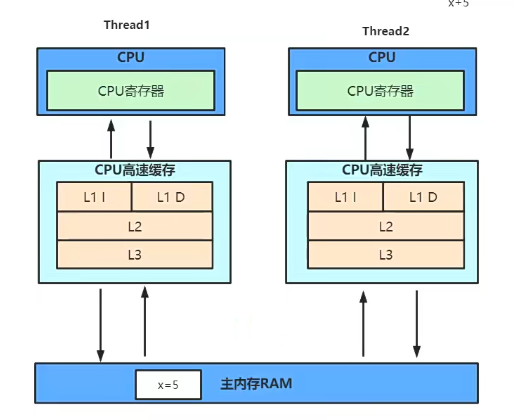
JMM模型与并发三大特性
如何学: 分理解并发的三大特性,JMM工作内存和主内存关系,知道多线程之间如何通信的,掌握volatile能保证可见性和有序性,CAS就可以了 并发和并行
目标都是最大化CPU的使用率 并行(parallel):指在同一时刻&a…
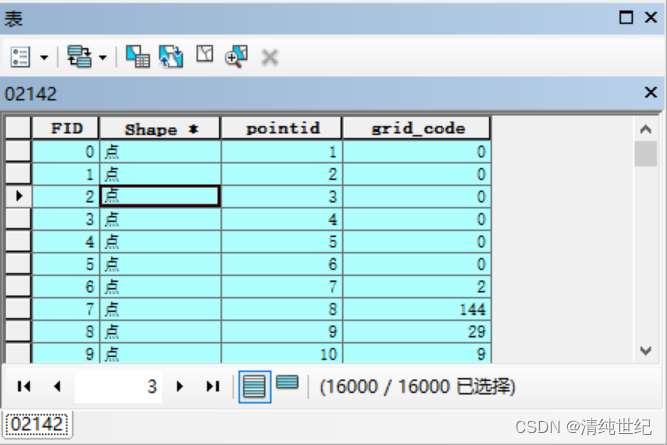
Arcgis对图像重采样、打开查看运行结果的窗口、逐像元提取数值
1、Arcgis对图像重采样
然后打开数据管理工具-栅格-栅格处理-重采样 打开后,此处我们输入数据用导入的影像,X和Y代表重采样的大小为8*8 注意:输出文件需要有文件后缀,否则报错。
采样后,像元就变成了8*8一个像元。 2…
![安装gymnasium[box2d]的问题](https://img-blog.csdnimg.cn/586097db2cce4da796514dc9d8aa358e.png)
安装gymnasium[box2d]的问题
安装时总会报错
Building wheels for collected packages: box2d-pyBuilding wheel for box2d-py (setup.py) ... errorerror: subprocess-exited-with-error python setup.py bdist_wheel did not run successfully.│ exit code: 1╰─> [16 lines of output]Using setup…
gitlab自编译 源码下载
网上都是怎么用 gitlab,但是实际开发中有需要针对 gitlab 进行二次编译自定义实现功能的想法。
搜索了网上的资料以及在官网的查找,查到了如下 gitlab 使用 ruby 开发。 gitlab 下载包
gitlab/gitlab-ce - Packages packages.gitlab.com
gitlab/gitl…
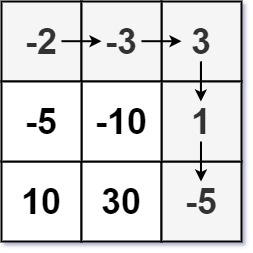
leetcode做题笔记174. 地下城游戏
恶魔们抓住了公主并将她关在了地下城 dungeon 的 右下角 。地下城是由 m x n 个房间组成的二维网格。我们英勇的骑士最初被安置在 左上角 的房间里,他必须穿过地下城并通过对抗恶魔来拯救公主。
骑士的初始健康点数为一个正整数。如果他的健康点数在某一时刻降至 0…
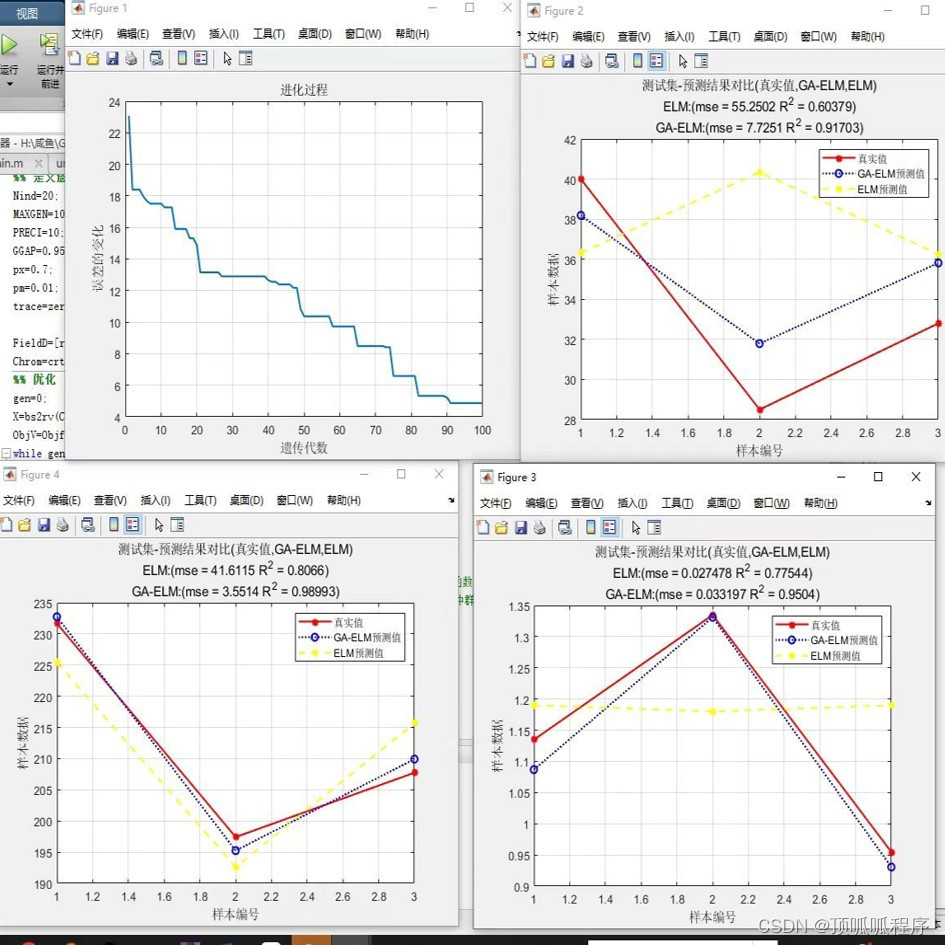
21GA-ELM,遗传算法优化ELM预测,并和优化前后以及真实数值进行对比,确定结果,基于MATLAB平台,程序已经调通,可以直接运行,需要直接拍下。
GA-ELM,遗传算法优化ELM预测,并和优化前后以及真实数值进行对比,确定结果,基于MATLAB平台,程序已经调通,可以直接运行,需要直接拍下。 21matlab时间序列预测极限学习遗传优化算 (xiaohongshu.co…
2023年(2024届)双非保研历程(中南、东南、浙大、信工所、国防科大、北邮)
个人情况
学校层次:双非 专业:信息安全(投的基本都是网安) 排名:2/66 英语:六级565,四级560 竞赛:大英赛国三、美赛H、蓝桥杯省一、数竞省一、词达人省一、数模国赛省三。 论文&…