目录
1. 串口GPIO配置
2. 串口波特率配置
3. 串口接收超时配置
4. 串口中断注册
5. 串口初始化
6. 串口数据接收处理
7. DMA接收配置和处理
1. 串口GPIO配置
端口号和Pin脚号跟STM32没什么区别。
串口复用功能跟STM32大不一样。
如下图,选自HC32F448 表 2-1 引脚功能表。
1)每个管脚都有对应的管脚名称、中断号,以及功能号
2)调试口默认为TRACE/JTAG功能号,若要使能普通GPIO功能则要关闭调试功能
3)非调试口默认功能号为Func0,即普通GPIO功能。Func2到Func11为定时器或时钟功能,Func12为EXMC/TIMA功能
4)Func32~63为通用复用功能-分为两组,对于同一组的IO,可以配置为UART/I2C/SPI/CAN 4组功能,且Rx/Tx可以互换。而不是像STM32那样,每个IO的复用功能是固定的,对应通讯线必须一一选对。
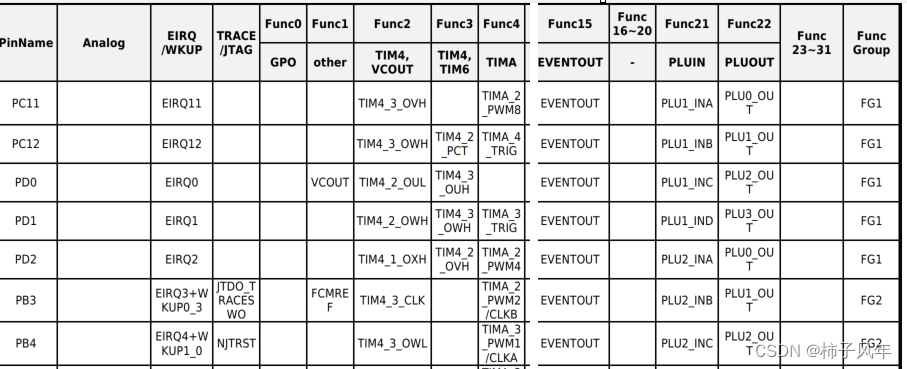

如下,硬件选择了PB0和PA7作为串口通讯脚,可以在FG1任意选择一个可用串口使用。
#define USART_RX_PORT (GPIO_PORT_B) /* PB0: USART2_RX */
#define USART_RX_PIN (GPIO_PIN_00)
#define USART_RX_GPIO_FUNC (GPIO_FUNC_37)
#define USART_TX_PORT (GPIO_PORT_A) /* PA7: USART2_TX */
#define USART_TX_PIN (GPIO_PIN_07)
#define USART_TX_GPIO_FUNC (GPIO_FUNC_36)
static void UartGpioConfig(void)
{
GPIO_SetFunc(USART_RX_PORT, USART_RX_PIN, USART_RX_GPIO_FUNC);
GPIO_SetFunc(USART_TX_PORT, USART_TX_PIN, USART_TX_GPIO_FUNC);
}2. 串口波特率配置
static void UartBaudConfig(void)
{
USART_FCG_ENABLE();
stc_usart_uart_init_t stcUartInit;
(void)USART_UART_StructInit(&stcUartInit);
stcUartInit.u32ClockDiv = USART_CLK_DIV64;
stcUartInit.u32CKOutput = USART_CK_OUTPUT_ENABLE;
stcUartInit.u32Baudrate = USART_BAUDRATE;
stcUartInit.u32OverSampleBit = USART_OVER_SAMPLE_8BIT;
USART_UART_Init(USART_UNIT, &stcUartInit, NULL);
}
3. 串口接收超时配置
小华HC32F4串口支持的中断与STM32大有不同:
1)HC32 接收数据寄存器满中断,在收到1个字节时就会触发。等同于STM32的RXNE。名字不同
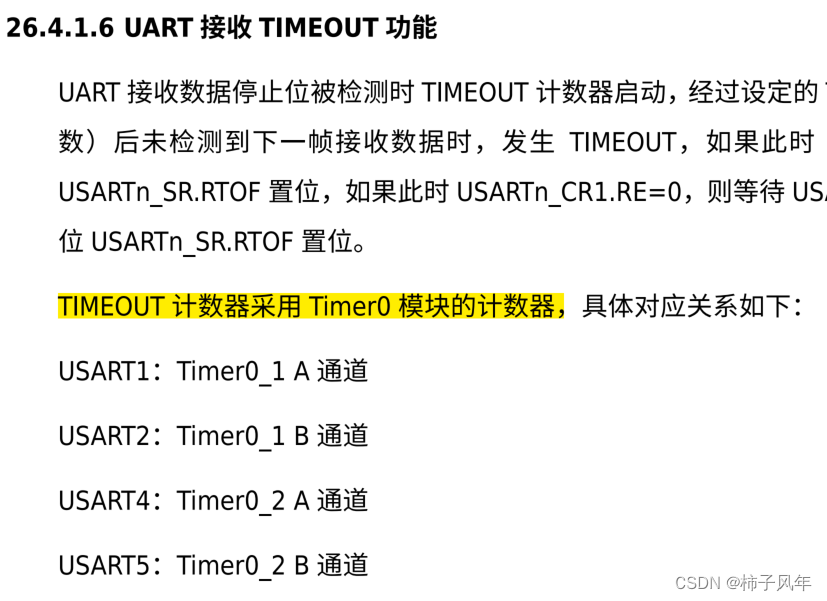
2)HC32 TIMEOUT中断,等同于STM32的空闲中断 IDLE 。HC32通过关联定时器直接配置超时时间,比STM32更加简便。

定时器Timer0被专门用来做串口的计时器,板子用的串口2,所以定时器要配置Timer0_1 B 。
//串口接收超时设置·关联定时器
#define USART_TIMEOUT_BITS (5000U)
#define TMR0_UNIT (CM_TMR0_1)
#define TMR0_CH (TMR0_CH_B)
#define TMR0_FCG_ENABLE() (FCG_Fcg2PeriphClockCmd(FCG2_PERIPH_TMR0_1, ENABLE))
/*
* TMR0_Config()
* 配置串口接收超时
*/
static void TMR0_Config(void)
{
uint16_t u16Div;
uint16_t u16Delay;
uint16_t u16CompareValue;
stc_tmr0_init_t stcTmr0Init;
TMR0_FCG_ENABLE();
/* Initialize TMR0 base function. */
stcTmr0Init.u32ClockSrc = TMR0_CLK_SRC_XTAL32;
stcTmr0Init.u32ClockDiv = TMR0_CLK_DIV8;
stcTmr0Init.u32Func = TMR0_FUNC_CMP;
if (TMR0_CLK_DIV1 == stcTmr0Init.u32ClockDiv) {
u16Delay = 7U;
} else if (TMR0_CLK_DIV2 == stcTmr0Init.u32ClockDiv) {
u16Delay = 5U;
} else if ((TMR0_CLK_DIV4 == stcTmr0Init.u32ClockDiv) || \
(TMR0_CLK_DIV8 == stcTmr0Init.u32ClockDiv) || \
(TMR0_CLK_DIV16 == stcTmr0Init.u32ClockDiv)) {
u16Delay = 3U;
} else {
u16Delay = 2U;
}
u16Div = (uint16_t)1U << (stcTmr0Init.u32ClockDiv >> TMR0_BCONR_CKDIVA_POS);
u16CompareValue = ((USART_TIMEOUT_BITS + u16Div - 1U) / u16Div) - u16Delay;
stcTmr0Init.u16CompareValue = u16CompareValue;
(void)TMR0_Init(TMR0_UNIT, TMR0_CH, &stcTmr0Init);
TMR0_HWStartCondCmd(TMR0_UNIT, TMR0_CH, ENABLE);
TMR0_HWClearCondCmd(TMR0_UNIT, TMR0_CH, ENABLE);
}4. 串口中断注册
#define USART_RX_ERR_IRQn (INT005_IRQn)
#define USART_RX_ERR_INT_SRC (INT_SRC_USART2_EI)
#define USART_RX_FULL_IRQn (INT006_IRQn)
#define USART_RX_FULL_INT_SRC (INT_SRC_USART2_RI)
#define USART1_RX_TIMEOUT_IRQn (INT007_IRQn)
#define USART1_RX_TIMEOUT_INT_SRC (INT_SRC_USART2_RTO)
static void USART_RxFull_IrqCallback(void);
static void USART_RxError_IrqCallback(void);
static void USART_RxTimeout_IrqCallback(void);
static void RegisterIrq(void)
{
stc_irq_signin_config_t stcIrqSigninConfig;
/* Register RX full IRQ handler. */
stcIrqSigninConfig.enIRQn = USART_RX_FULL_IRQn;
stcIrqSigninConfig.enIntSrc = USART_RX_FULL_INT_SRC;
stcIrqSigninConfig.pfnCallback = &USART_RxFull_IrqCallback;
(void)INTC_IrqSignIn(&stcIrqSigninConfig);
NVIC_ClearPendingIRQ(stcIrqSigninConfig.enIRQn);
NVIC_SetPriority(stcIrqSigninConfig.enIRQn, DDL_IRQ_PRIO_DEFAULT);
NVIC_EnableIRQ(stcIrqSigninConfig.enIRQn);
/* Register RX error IRQ handler. */
stcIrqSigninConfig.enIRQn = USART_RX_ERR_IRQn;
stcIrqSigninConfig.enIntSrc = USART_RX_ERR_INT_SRC;
stcIrqSigninConfig.pfnCallback = &USART_RxError_IrqCallback;
(void)INTC_IrqSignIn(&stcIrqSigninConfig);
NVIC_ClearPendingIRQ(stcIrqSigninConfig.enIRQn);
NVIC_SetPriority(stcIrqSigninConfig.enIRQn, DDL_IRQ_PRIO_DEFAULT);
NVIC_EnableIRQ(stcIrqSigninConfig.enIRQn);
/* Register RX timeout IRQ handler. */
stcIrqSigninConfig.enIRQn = USART1_RX_TIMEOUT_IRQn;
stcIrqSigninConfig.enIntSrc = USART1_RX_TIMEOUT_INT_SRC;
stcIrqSigninConfig.pfnCallback = &USART_RxTimeout_IrqCallback;
(void)INTC_IrqSignIn(&stcIrqSigninConfig);
NVIC_ClearPendingIRQ(stcIrqSigninConfig.enIRQn);
NVIC_SetPriority(stcIrqSigninConfig.enIRQn, DDL_IRQ_PRIO_DEFAULT);
NVIC_EnableIRQ(stcIrqSigninConfig.enIRQn);
}5. 串口初始化
LL_PERIPH_WE() 为打开相应寄存器的写使能
LL_PERIPH_WP() 为关闭相应寄存器的写使能
void UART_Init(void)
{
LL_PERIPH_WE(LL_PERIPH_ALL);
UartGpioConfig();
UartBaudConfig();
TMR0_Config();
RegisterIrq();
LL_PERIPH_WP(LL_PERIPH_ALL);
USART_FuncCmd(USART_UNIT, ( USART_TX | USART_RX | USART_INT_RX | USART_RX_TIMEOUT | USART_INT_RX_TIMEOUT), ENABLE);
}6. 串口数据接收处理
USART_RxFull_IrqCallback 中断 只负责接收和缓存单字节数据,以及递增数据长度 (通过读数据清除标志位)
USART_RxTimeout_IrqCallback 中断 处理超时中断(超时中断触发后必须要关闭定时器,和清除标志位)
USART_RxError_IrqCallback 中断 处理异常错误
static void USART_RxFull_IrqCallback(void)
{
uint8_t u8Data = (uint8_t)USART_ReadData(USART_UNIT);
if(gps_len < RX_FRAME_LEN_MAX)
gps_buf[gps_len++] = u8Data;
}
static void USART_RxError_IrqCallback(void)
{
(void)USART_ReadData(USART_UNIT);
USART_ClearStatus(USART_UNIT, (USART_FLAG_PARITY_ERR | USART_FLAG_FRAME_ERR | USART_FLAG_OVERRUN));
}
static void USART_RxTimeout_IrqCallback(void)
{
TMR0_Stop(TMR0_UNIT, TMR0_CH);
USART_ClearStatus(USART_UNIT, USART_FLAG_RX_TIMEOUT);
GpsRxCallBack(gps_buf, gps_len);
gps_len = 0;
}对于GPS、Wifi这类不频繁的数据交互,用到超时中断和接收寄存器满就可以处理数据了。
对于4G/蓝牙等有持续大量数据交互的模块,就需要用到DMA了。
7. 串口数据发送
static int32_t UartSendByte(CM_USART_TypeDef *UART, uint8_t ch)
{
uint32_t u32TxEmpty = 0UL;
__IO uint32_t u32TmpCount = 0UL;
uint32_t u32Timeout = HCLK_VALUE/USART_BAUDRATE;
int32_t i32Ret = LL_ERR_INVD_PARAM;
/* Wait TX data register empty */
while ((u32TmpCount <= u32Timeout) && (0UL == u32TxEmpty)) {
u32TxEmpty = READ_REG32_BIT(UART->SR, USART_SR_TXE);
u32TmpCount++;
}
if (0UL != u32TxEmpty) {
WRITE_REG16(UART->TDR, ch);
i32Ret = LL_OK;
} else {
i32Ret = LL_ERR_TIMEOUT;
}
return i32Ret;
}8. DMA接收配置和处理
DMA配置方式与STM32基本相同:
1)设置DMA源地址和源地址增长类型,设置目的地址和目的地址增长类型
DMA接收属于串口数据寄存器到内存,即源地址固定,目的地址递增
DMA发送属于内存到串口数据寄存器,即源地址递增,目的地址固定
2)设置位宽、传输大小、传输块数
所不同的是,HC32有一个可配置的自动运行系统AOS。
可以配置AOS源和AOS目标.
AOS源可以是DMA传输完成、UART接收数据、定时器上溢和下溢、event电平变化等等。
AOS目标可以是DMA传输、定时器计数、ADC模数转换、event事件等等
如下是DMA初始化配置的参考代码,配置了串口DMA接收和串口DMA发送:
//DMA单元
#define RX_DMA_UNIT (CM_DMA1)
//DMA通道号·通道号越小优先级越高
#define RX_DMA_CH (DMA_CH0)
//DMA单元时钟
#define RX_DMA_FCG_ENABLE() (FCG_Fcg0PeriphClockCmd(FCG0_PERIPH_DMA1, ENABLE))
//AOS系统的目标·触发DMA1通道0传输
#define RX_DMA_TRIG_SEL (AOS_DMA1_0)
//AOS系统的触发源·接收数据寄存器满中断
#define RX_DMA_TRIG_EVT_SRC (EVT_SRC_USART1_RI)
//AOS系统的目标·DMA完成中断
#define RX_DMA_RECONF_TRIG_SEL (AOS_DMA_RC)
//AOS系统的触发源·AOS_STRG中断源
#define RX_DMA_RECONF_TRIG_EVT_SRC (EVT_SRC_AOS_STRG)
//DMA传输完成中断·通道号1
#define RX_DMA_TC_INT (DMA_INT_TC_CH0)
//DMA传输完成标志·通道号2
#define RX_DMA_TC_FLAG (DMA_FLAG_TC_CH0)
//DMA传输完成中断号
#define RX_DMA_TC_IRQn (INT000_IRQn)
//DMA传输完成中断源
#define RX_DMA_TC_INT_SRC (INT_SRC_DMA1_TC0)
//串口DMA发送配置
#define TX_DMA_UNIT (CM_DMA2)
#define TX_DMA_CH (DMA_CH0)
#define TX_DMA_FCG_ENABLE() (FCG_Fcg0PeriphClockCmd(FCG0_PERIPH_DMA2, ENABLE))
#define TX_DMA_TRIG_SEL (AOS_DMA2_0)
#define TX_DMA_TRIG_EVT_SRC (EVT_SRC_USART1_TI)
#define TX_DMA_TC_INT (DMA_INT_TC_CH0)
#define TX_DMA_TC_FLAG (DMA_FLAG_TC_CH0)
#define TX_DMA_TC_IRQn (INT001_IRQn)
#define TX_DMA_TC_INT_SRC (INT_SRC_DMA2_TC0)
/*******************************************************************************
* Local variable definitions ('static')
******************************************************************************/
static __IO en_flag_status_t m_enTxEnd = SET;
static uint8_t m_4gRxBuf[RX_FRAME_LEN_MAX];
static uint8_t *m_auTxBuf = NULL;
/*******************************************************************************
* Local function definitions ('static')
******************************************************************************/
static void RX_DMA_TC_IrqCallback(void);
static void TX_DMA_TC_IrqCallback(void);
/*
* DMA_Config()
* 配置串口DMA接收和DMA发送
*/
static int32_t DMA_Config(void)
{
int32_t i32Ret;
stc_dma_init_t stcDmaInit;
stc_dma_llp_init_t stcDmaLlpInit;
stc_irq_signin_config_t stcIrqSignConfig;
static stc_dma_llp_descriptor_t stcLlpDesc;
//使能DMA和FCG时钟
RX_DMA_FCG_ENABLE();
TX_DMA_FCG_ENABLE();
FCG_Fcg0PeriphClockCmd(FCG0_PERIPH_AOS, ENABLE);
/* USART_RX_DMA */
(void)DMA_StructInit(&stcDmaInit);
stcDmaInit.u32IntEn = DMA_INT_ENABLE;//DMA interrupt enable
stcDmaInit.u32BlockSize = 1UL;//DMA block size
stcDmaInit.u32TransCount = ARRAY_SZ(m_4gRxBuf);//DMAbuf大小
stcDmaInit.u32DataWidth = DMA_DATAWIDTH_8BIT;//DMAbuf位宽
stcDmaInit.u32DestAddr = (uint32_t)m_4gRxBuf;//DMAbuf地址
stcDmaInit.u32SrcAddr = (uint32_t)(&USART_UNIT->RDR);//由外设到内存的 外设地址 -> 串口数据寄存器
stcDmaInit.u32SrcAddrInc = DMA_SRC_ADDR_FIX;//由外设到内存的 源地址模式 固定
stcDmaInit.u32DestAddrInc = DMA_DEST_ADDR_INC;//由外设到内存的 目标地址模式 自动递增
i32Ret = DMA_Init(RX_DMA_UNIT, RX_DMA_CH, &stcDmaInit);
if (LL_OK == i32Ret)
{
(void)DMA_LlpStructInit(&stcDmaLlpInit);
stcDmaLlpInit.u32State = DMA_LLP_ENABLE;
stcDmaLlpInit.u32Mode = DMA_LLP_WAIT;
stcDmaLlpInit.u32Addr = (uint32_t)&stcLlpDesc;
(void)DMA_LlpInit(RX_DMA_UNIT, RX_DMA_CH, &stcDmaLlpInit);//初始化DMA链表指针
stcLlpDesc.SARx = stcDmaInit.u32SrcAddr;
stcLlpDesc.DARx = stcDmaInit.u32DestAddr;
stcLlpDesc.DTCTLx = (stcDmaInit.u32TransCount << DMA_DTCTL_CNT_POS) | (stcDmaInit.u32BlockSize << DMA_DTCTL_BLKSIZE_POS);;
stcLlpDesc.LLPx = (uint32_t)&stcLlpDesc;
stcLlpDesc.CHCTLx = stcDmaInit.u32SrcAddrInc | stcDmaInit.u32DestAddrInc | stcDmaInit.u32DataWidth | \
stcDmaInit.u32IntEn | stcDmaLlpInit.u32State | stcDmaLlpInit.u32Mode;
DMA_ReconfigLlpCmd(RX_DMA_UNIT, RX_DMA_CH, ENABLE);
DMA_ReconfigCmd(RX_DMA_UNIT, ENABLE);
AOS_SetTriggerEventSrc(RX_DMA_RECONF_TRIG_SEL, RX_DMA_RECONF_TRIG_EVT_SRC);
stcIrqSignConfig.enIntSrc = RX_DMA_TC_INT_SRC;
stcIrqSignConfig.enIRQn = RX_DMA_TC_IRQn;
stcIrqSignConfig.pfnCallback = &RX_DMA_TC_IrqCallback;
(void)INTC_IrqSignIn(&stcIrqSignConfig);
NVIC_ClearPendingIRQ(stcIrqSignConfig.enIRQn);
NVIC_SetPriority(stcIrqSignConfig.enIRQn, DDL_IRQ_PRIO_DEFAULT);
NVIC_EnableIRQ(stcIrqSignConfig.enIRQn);
AOS_SetTriggerEventSrc(RX_DMA_TRIG_SEL, RX_DMA_TRIG_EVT_SRC);
DMA_Cmd(RX_DMA_UNIT, ENABLE);
DMA_TransCompleteIntCmd(RX_DMA_UNIT, RX_DMA_TC_INT, ENABLE);
(void)DMA_ChCmd(RX_DMA_UNIT, RX_DMA_CH, ENABLE);
}
(void)DMA_StructInit(&stcDmaInit);
stcDmaInit.u32IntEn = DMA_INT_ENABLE;
stcDmaInit.u32BlockSize = 1UL;
stcDmaInit.u32TransCount = ARRAY_SZ(m_4gRxBuf);
stcDmaInit.u32DataWidth = DMA_DATAWIDTH_8BIT;
stcDmaInit.u32DestAddr = (uint32_t)(&USART_UNIT->TDR);
stcDmaInit.u32SrcAddr = (uint32_t)m_4gRxBuf;
stcDmaInit.u32SrcAddrInc = DMA_SRC_ADDR_INC;
stcDmaInit.u32DestAddrInc = DMA_DEST_ADDR_FIX;
i32Ret = DMA_Init(TX_DMA_UNIT, TX_DMA_CH, &stcDmaInit);
if (LL_OK == i32Ret)
{
stcIrqSignConfig.enIntSrc = TX_DMA_TC_INT_SRC;
stcIrqSignConfig.enIRQn = TX_DMA_TC_IRQn;
stcIrqSignConfig.pfnCallback = &TX_DMA_TC_IrqCallback;
(void)INTC_IrqSignIn(&stcIrqSignConfig);
NVIC_ClearPendingIRQ(stcIrqSignConfig.enIRQn);
NVIC_SetPriority(stcIrqSignConfig.enIRQn, DDL_IRQ_PRIO_DEFAULT);
NVIC_EnableIRQ(stcIrqSignConfig.enIRQn);
AOS_SetTriggerEventSrc(TX_DMA_TRIG_SEL, TX_DMA_TRIG_EVT_SRC);
DMA_Cmd(TX_DMA_UNIT, ENABLE);
DMA_TransCompleteIntCmd(TX_DMA_UNIT, TX_DMA_TC_INT, ENABLE);
}
return i32Ret;
}如下是DMA接收处理代码:
1)USART_RxTimeout_IrqCallback
重启AOS系统
关闭串口超时定时器,清除串口超时标志位。
处理DMA接收数据。
2)RX_DMA_TC_IrqCallback
即接收完成中断
硬件上需要清除中断标志位
3)USART_TxComplete_IrqCallback
即串口发送完成中断
硬件上需要清除标志位,一般要失能发送中断
//串口接收超时中断
static void USART_RxTimeout_IrqCallback(void)
{
uint16_t unLen = RX_FRAME_LEN_MAX - (uint16_t)DMA_GetTransCount(RX_DMA_UNIT, RX_DMA_CH);
AOS_SW_Trigger();
TMR0_Stop(TMR0_UNIT, TMR0_CH);
USART_ClearStatus(USART_UNIT, USART_FLAG_RX_TIMEOUT);
if(unLen != 0 && unLen != RX_FRAME_LEN_MAX)
DtuRxCallBack(m_4gRxBuf, unLen);
}
//串口DMA接收·传输完成中断
static void RX_DMA_TC_IrqCallback(void)
{
DtuRxCallBack(m_4gRxBuf, RX_FRAME_LEN_MAX);
DMA_ClearTransCompleteStatus(RX_DMA_UNIT, RX_DMA_TC_FLAG);
}
//串口发送完成中断
static void USART_TxComplete_IrqCallback(void)
{
m_enTxEnd = SET;
DtuTxCallBack(m_auTxBuf);
USART_FuncCmd(USART_UNIT, (USART_TX | USART_INT_TX_CPLT), DISABLE);
USART_ClearStatus(USART_UNIT, USART_FLAG_TX_CPLT);
}
//串口接收错误中断
static void USART_RxError_IrqCallback(void)
{
(void)USART_ReadData(USART_UNIT);
USART_ClearStatus(USART_UNIT, (USART_FLAG_PARITY_ERR | USART_FLAG_FRAME_ERR | USART_FLAG_OVERRUN));
}
//串口DMA发送·传输完成中断
static void TX_DMA_TC_IrqCallback(void)
{
USART_FuncCmd(USART_UNIT, USART_INT_TX_CPLT, ENABLE);
DMA_ClearTransCompleteStatus(TX_DMA_UNIT, TX_DMA_TC_FLAG);
}
9. DMA发送
//串口DMA发送
void DtuDMASend(uint8_t *pBuf, uint16_t u16TxLen)
{
#if 0 //串口发送数据打印
printf("Tx: ");
for(uint16_t i = 0; i < u16TxLen; i++)
{
printf("%02X",pBuf[i]);
}
printf("\r\n");
#endif
//等待上一包发完
while(m_enTxEnd == RESET);
m_enTxEnd = RESET;
m_auTxBuf = pBuf;
//启动DMA传输
DMA_SetSrcAddr(TX_DMA_UNIT, TX_DMA_CH, (uint32_t)pBuf);
DMA_SetTransCount(TX_DMA_UNIT, TX_DMA_CH, u16TxLen);
(void)DMA_ChCmd(TX_DMA_UNIT, TX_DMA_CH, ENABLE);
USART_FuncCmd(USART_UNIT, USART_TX, ENABLE);
}

![2023年中国石油测井设备市场格局及存在问题分析[图]](https://img-blog.csdnimg.cn/img_convert/949ae9eb3c3c8633b0a621c80df67262.png)