实验目标:
flash的普通读指令,在指定地址开始读。可以更改地址与读的数据个数。
先发送读指令+扇区地址+页地址+字节地址。
然后读数据。再把读到的串行数据转化为8bit的数据,存入fifo。
然后读出FIFO中数据,通过uart_tx模块发送给上位机。
经验总结:
接收数据:比如接收8bit的串行数据,通过miso传递。
1,先接收高位。
reg [7:0] data ;
那么通过data保存miso传递的数据,把串行数据,转换为并行数据。
有两种常用写法:
data <= {data[6:0],miso};
或者
data <= data << 1 + miso ;
或者:写一个cnt_bit,记录保存到第几bit。
data[cnt_bit] <= miso ;
2,先接收低位
data <= {miso,data[7:1]};
data[cnt_bit] <= miso ;
小技巧:
画时序图时不一定要先画内部信号,再画输出端口信号。
按照自己的设计思路,该到那个信号就画那个信号,画完也不要改,
写代码时,按照这个思路,这个画时序图的顺序,编写代码。
相当于再次检查一遍,即容易排错,有容易编写代码。
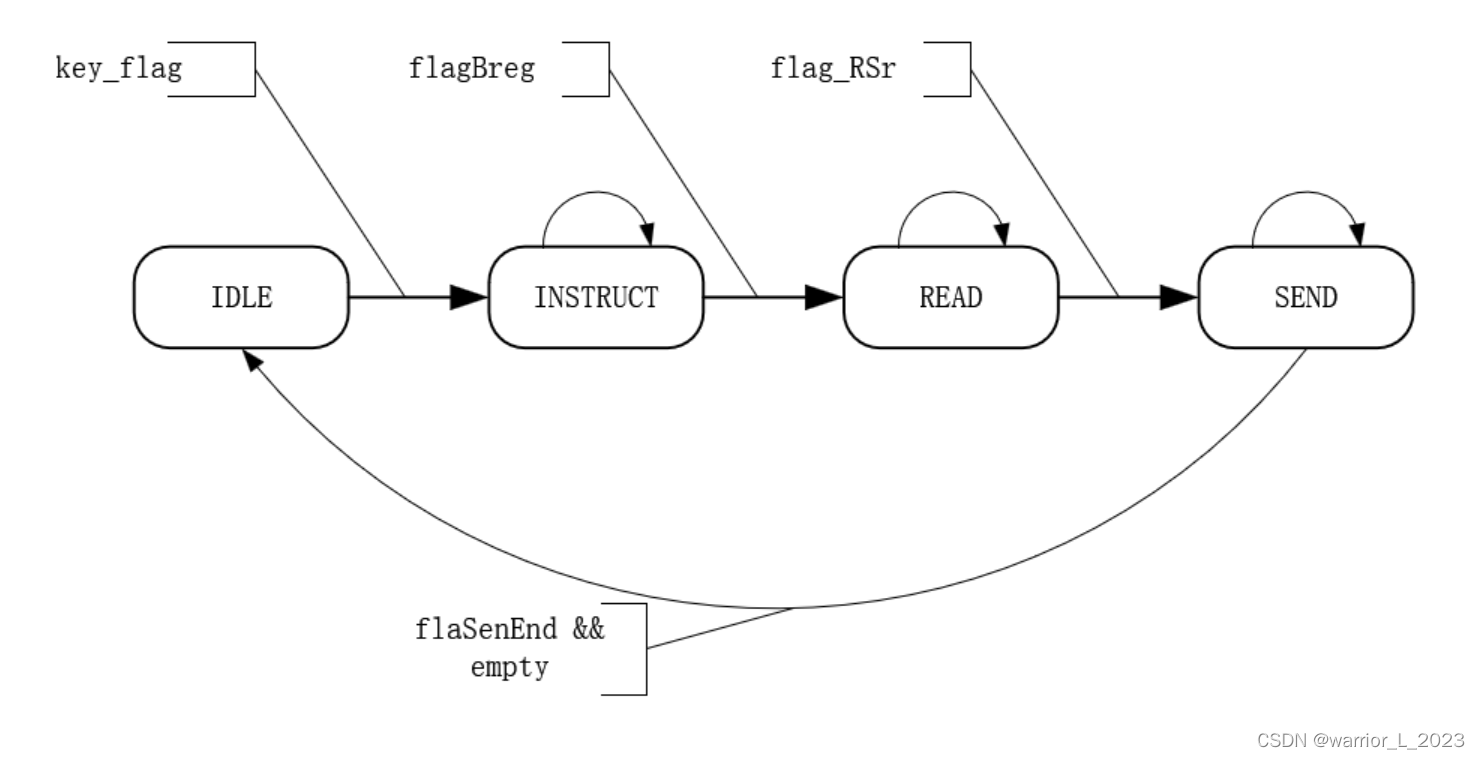
状态机:
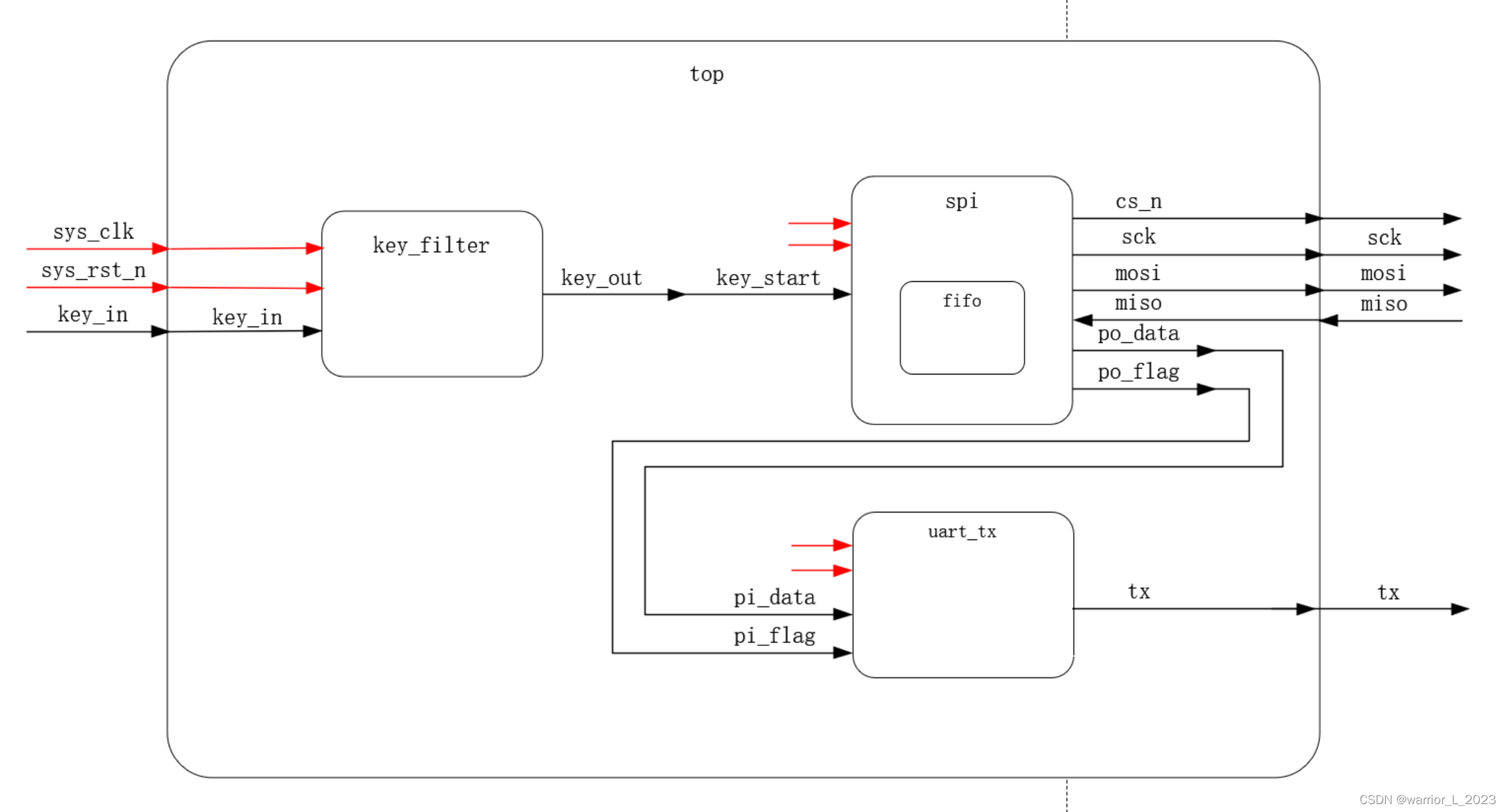
模块框图:
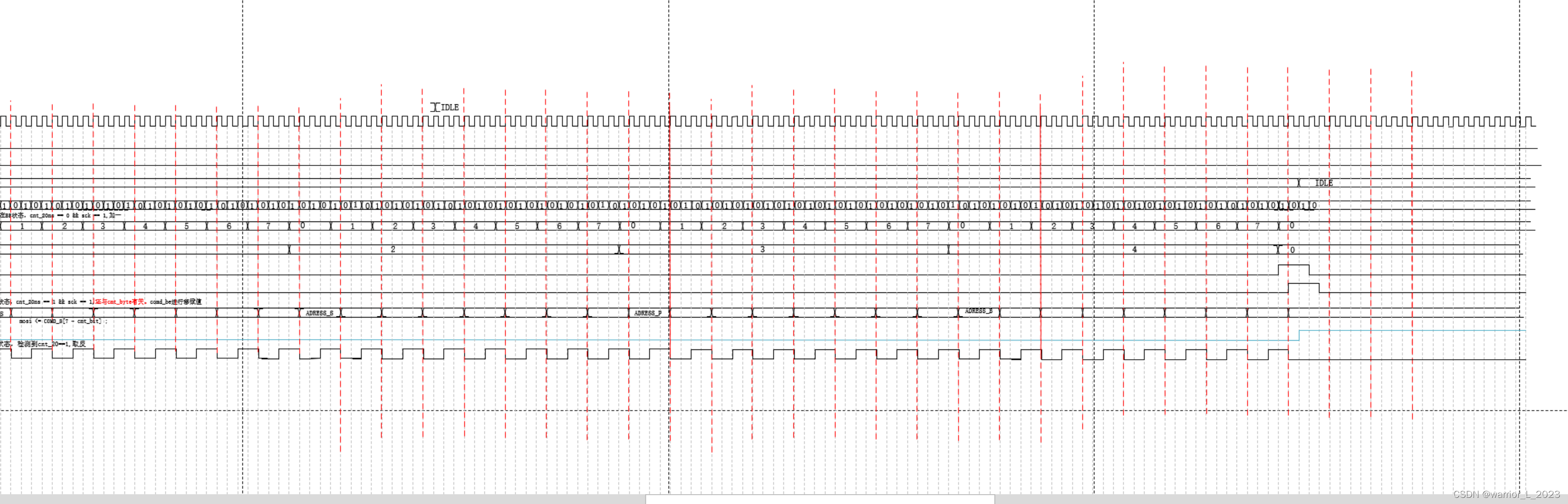
时序图:

代码:
module spi (
input wire sys_clk ,
input wire sys_rst_n ,
input wire key_flag ,
input wire miso ,
output reg cs_n ,
output reg sck ,
output reg mosi ,
output reg po_flag ,
output wire [7:0] po_data
);
// localparam define 一般状态机的状态定义用局部参数就可以。
localparam IDLE = 4'b0001 ,
INSTRUCT = 4'b0010 ,
READ = 4'b0100 ,
SEND = 4'b1000 ;
// parameter define 指令,计数器最大值,用全局参数定义。
parameter COMD_REA = 8'h03 , // comd_read
ADDR_SEC = 8'h00 , // address_secter 扇区地址
ADDR_PAG = 8'h00 , // address_page 页地址(行地址)
ADDR_BYT = 8'h00 , // assress_byte 字节地址
NUM_COMD = 4'd4 ; // 用来记录在指令状态传递指令和地址byte数量
parameter CNT_MAX_BYTE = 11'd300 , // 4 + 要读出的数据。例如: 4 + 256
CNT_MAX_SEND = 20'd53000 ;
// reg signal define
reg [3:0] state_c ;
reg [3:0] state_n ;
reg cnt_20_ns ;
reg [2:0] cnt_bit ;
reg [10:0] cnt_byte ;
reg flag_b ; // flag_byte
reg flagBreg ;
reg flag_R_S ; // flag_byte
reg flag_RSr ;
reg [7:0] datInFifo ; // data_in_fifo
reg flag_data ; // flag_data 采样标志信号
reg flaInFifo ; // flag_in_fifo
reg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。
reg flaSenEnd ; // 计数器cnt_send计数到CNT_MAX_SEND - 2 拉高一个时钟周期,
reg flag_out_fifo_reg ;
// wire signal define
wire empty ;
wire full ;
wire flaOutFif ; // flag_out_fifo
wire [9:0] usedw ; // fifo中存储的数据量
wire IDLEtoINSTRUCT ;
wire INSTRUCTto_READ ;
wire READtoSEND ;
wire SENDtoIDLE ;
/**********************************************************************/
// // reg signal describe
/*******状态机采用三段式描述*******/
// reg [3:0] state_c ;
// reg [3:0] state_n ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
state_c <= IDLE ;
else
state_c <= state_n ;
end
always @(*) begin
case (state_c)
IDLE : if(IDLEtoINSTRUCT)
state_n <= INSTRUCT ;
else
state_n <= IDLE ;
INSTRUCT : if(INSTRUCTto_READ)
state_n <= READ ;
else
state_n <= INSTRUCT ;
READ : if(READtoSEND)
state_n <= SEND ;
else
state_n <= READ ;
SEND : if(SENDtoIDLE)
state_n <= IDLE ;
else
state_n <= SEND ;
default: state_n <= IDLE ;
endcase
end
assign IDLEtoINSTRUCT = (state_c == IDLE ) && (key_flag) ;
assign INSTRUCTto_READ = (state_c == INSTRUCT) && (flagBreg) ; // 指令的的最后1byte发送完毕
assign READtoSEND = (state_c == READ ) && (flag_RSr) ; // 读完想要的最后1byte
assign SENDtoIDLE = (state_c == SEND ) && (flaSenEnd && empty) ;
// reg cnt_20_ns ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_20_ns <= 1'b0 ;
else if(state_c == INSTRUCT || state_c == READ)
cnt_20_ns <= cnt_20_ns + 1'b1 ;
else if(state_c != INSTRUCT || state_c != READ)
cnt_20_ns <= 1'b0 ;
else
cnt_20_ns <= 1'b0 ;
end
// reg [2:0] cnt_bit ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_bit <=3'd0 ;
else
case (state_c)
IDLE : cnt_bit <=3'd0 ;
INSTRUCT: if(!cnt_20_ns && sck && cnt_bit == 7)
cnt_bit <= 3'd0 ;
else if(!cnt_20_ns && sck)
cnt_bit <= cnt_bit + 1'b1 ;
READ : if(!cnt_20_ns && sck && cnt_bit == 7)
cnt_bit <= 3'd0 ;
else if(!cnt_20_ns && sck)
cnt_bit <= cnt_bit + 1'b1 ;
SEND : cnt_bit <=3'd0 ;
default : cnt_bit <=3'd0 ;
endcase
end
// reg [10:0] cnt_byte ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_byte <= 4'd0 ;
else if(cnt_bit == 7 && cnt_byte == CNT_MAX_BYTE - 1 && !cnt_20_ns && sck)
cnt_byte <= 4'd0 ;
else if(cnt_bit == 7 && !cnt_20_ns && sck)
cnt_byte <= cnt_byte + 1'b1 ;
else
cnt_byte <= cnt_byte ;
end
// reg flag_R_S ;
// reg flag_b ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
flag_b <= 1'b0 ;
flag_R_S <= 1'b0 ;
end
else
case (state_c)
IDLE : begin
flag_b <= 1'b0 ;
flag_R_S <= 1'b0 ;
end
INSTRUCT: begin
if((cnt_byte == NUM_COMD - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)
flag_b <= 1'b1 ;
else
flag_b <= flag_b ;
flag_R_S <= 1'b0 ;
end
READ : begin
if(cnt_byte == NUM_COMD)
flag_R_S <= 1'b0 ;
else if((cnt_byte == CNT_MAX_BYTE - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)
flag_R_S <= 1'b1 ;
flag_b <= 1'b0 ;
end
SEND : begin
flag_b <= 1'b0 ;
flag_R_S <= 1'b0 ;
end
default : begin
flag_b <= 1'b0 ;
flag_R_S <= 1'b0 ;
end
endcase
end
// reg flagBreg ;
// reg flag_RSr ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flagBreg <= 1'b0 ;
else
flagBreg <= flag_b ;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flag_RSr <= 1'b0 ;
else
flag_RSr <= flag_R_S ;
end
// reg [7:0] datInFifo ; // data_in_fifo
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
datInFifo <= 1'b0 ;
else if(flag_data)
datInFifo <= {miso,datInFifo[7:1]}; // 读flash中数据,先传的低位。
else
datInFifo <= datInFifo ;
end
// reg flag_data ; // flag_data 采样标志信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flag_data <= 1'b0 ;
else if(state_c == READ) begin
if(cnt_20_ns && !sck)
flag_data <= 1'b1 ;
else
flag_data <= 1'b0 ;
end else begin
flag_data <= 1'b0 ;
end
end
// reg flaInFifo ; // flag_in_fifo
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flaInFifo <= 1'b0 ;
else if(state_c == READ && cnt_bit == 7 && flag_data)
flaInFifo <= 1'b1 ;
else
flaInFifo <= 1'b0 ;
end
// reg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_send <= 20'd0 ;
else
if(state_c == SEND) begin
if(cnt_send == CNT_MAX_SEND - 1)
cnt_send <= 20'd0 ;
else
cnt_send <= cnt_send + 1'b1 ;
end
else
cnt_send <= 20'd0 ;
end
// reg flag_out_fifo_reg ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flag_out_fifo_reg <= 1'b0 ;
else if(flaSenEnd && !empty)
flag_out_fifo_reg <= 1'b1 ;
else
flag_out_fifo_reg <= 1'b0 ;
end
// reg flaSenEnd ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
flaSenEnd <= 1'b0 ;
else if(cnt_send == CNT_MAX_SEND - 2)
flaSenEnd <= 1'b1 ;
else
flaSenEnd <= 1'b0 ;
end
// output signal describe
// cs_n ,
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cs_n <= 1'b1 ;
else
case (state_c)
IDLE : if(key_flag)
cs_n <= 1'b0 ;
else
cs_n <= cs_n ;
INSTRUCT: cs_n <= cs_n ;
READ : cs_n <= cs_n ;
SEND : cs_n <= 1'b1 ;
default : cs_n <= 1'b1 ;
endcase
end
// sck ,
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
sck <= 1'b0 ;
else
case (state_c)
IDLE : sck <= 1'b0 ;
INSTRUCT: if(cnt_20_ns)
sck <= ~sck ;
else
sck <= sck ;
READ : if(cnt_20_ns)
sck <= ~sck ;
else
sck <= sck ;
SEND : sck <= 1'b0 ;
default : sck <= 1'b0 ;
endcase
end
// mosi ,
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
mosi <= 1'b0 ;
end else begin
case (state_c)
IDLE : mosi <= 1'b0 ;
INSTRUCT: case (cnt_byte)
0 : if(cnt_bit == 0)
mosi <= COMD_REA[7] ;
else if(cnt_20_ns && sck)
mosi <= COMD_REA[7 - cnt_bit] ;
else
mosi <= mosi ;
1 : if(cnt_bit == 0)
mosi <= ADDR_SEC[7] ;
else if(cnt_20_ns && sck)
mosi <= ADDR_SEC[7 - cnt_bit] ;
else
mosi <= mosi ;
2 : if(cnt_bit == 0)
mosi <= ADDR_PAG[7] ;
else if(cnt_20_ns && sck)
mosi <= ADDR_PAG[7 - cnt_bit] ;
else
mosi <= mosi ;
3 : if(cnt_bit == 0)
mosi <= ADDR_BYT[7] ;
else if(cnt_20_ns && sck)
mosi <= ADDR_BYT[7 - cnt_bit] ;
else
mosi <= mosi ;
default : mosi <= 1'b0 ;
endcase
READ : mosi <= 1'b0 ;
SEND : mosi <= 1'b0 ;
default : mosi <= 1'b0 ;
endcase
end
end
// po_flag ,
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
po_flag <= 1'b0 ;
else
po_flag <= flag_out_fifo_reg ;
end
// wire [7:0] po_data ;// 直接连接到fifo的输出端口。
// */
/***********************例化FIFO***************************************/
assign flaOutFif = flag_out_fifo_reg ;
fifo_1024x8 fifo_1024x8_inst(
.clock ( sys_clk ) ,
.data ( datInFifo ) ,
.rdreq ( flaOutFif ) ,
.wrreq ( flaInFifo ) ,
.empty ( empty ) ,
.full ( full ) ,
.q ( po_data ) ,
.usedw ( usedw )
);
endmodulemodule top (
input wire sys_clk ,
input wire sys_rst_n ,
input wire key_in ,
input wire miso ,
output wire cs_n ,
output wire sck ,
output wire mosi ,
output wire tx
);
// 例化间连线
wire key_flag ;
wire po_flag ;
wire [7:0] po_data ;
key_filter key_filter_isnt(
.sys_clk ( sys_clk ) ,
.sys_rst_n ( sys_rst_n ) ,
.key_in ( key_in ) ,
.key_out ( key_flag )
);
spi spi_inst(
.sys_clk ( sys_clk ) ,
.sys_rst_n ( sys_rst_n ) ,
.key_flag ( key_flag ) ,
.miso ( miso ) ,
.cs_n ( cs_n ) ,
.sck ( sck ) ,
.mosi ( mosi ) ,
.po_flag ( po_flag ) ,
.po_data ( po_data )
);
uart_tx uart_tx_isnt(
.sys_clk ( sys_clk ) ,
.sys_rst_n ( sys_rst_n ) ,
.pi_flag ( po_flag ) ,
.pi_data ( po_data ) ,
.tx ( tx )
);
endmodule
module key_filter
#(
parameter MAX_CNT_20MS = 20'd100_0000
)(
input wire sys_clk ,
input wire sys_rst_n ,
input wire key_in ,
output wire key_out
);
reg key_r_0 ;
reg key_r_1 ;
wire nege ;
wire pose ;
reg [19:00] cnt_20ms ;
wire add_cnt_20ms ;
wire end_cnt_20ms ;
reg add_cnt_flag ;
// key_r_0 key_r_1
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
key_r_0 <= 1'b1 ;
end else begin
key_r_0 <= key_in ;
end
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
key_r_1 <= 1'b1 ;
end else begin
key_r_1 <= key_r_0 ;
end
end
// nege pose
assign nege = ~key_r_0 && key_r_1 ;
assign pose = key_r_0 && ~key_r_1 ;
// add_cnt_flag
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
add_cnt_flag <= 1'b0 ;
end else begin
if(nege) begin
add_cnt_flag <= 1'b1 ;
end else begin
if( pose || end_cnt_20ms ) begin
add_cnt_flag <= 1'b0 ;
end else begin
add_cnt_flag <= add_cnt_flag ;
end
end
end
end
// cnt_20ms add_cnt_20ms end_cnt_20ms
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n) begin
cnt_20ms <= 20'd0 ;
end else begin
if(add_cnt_20ms) begin
if(end_cnt_20ms) begin
cnt_20ms <= 20'd0 ;
end else begin
cnt_20ms <= cnt_20ms + 20'd1 ;
end
end else begin
cnt_20ms <= 20'd0 ;
end
end
end
assign add_cnt_20ms = add_cnt_flag ;
assign end_cnt_20ms = add_cnt_20ms && cnt_20ms == ( MAX_CNT_20MS - 1'b1 ) ;
// key_out
// always @(posedge sys_clk or negedge sys_rst_n) begin
// // always @(*) begin // 这样的话 会综合成 数据选择器
// if(~sys_rst_n) begin
// key_out <= 1'b0 ;
// end else begin
// if(end_cnt_20ms) begin
// key_out <= 1'b1 ;
// end else begin
// key_out <= 1'b0 ;
// end
// end
// end
assign key_out = end_cnt_20ms ;
endmodule
module uart_tx (
input wire sys_clk ,
input wire sys_rst_n ,
input wire pi_flag ,
input wire [7:0] pi_data ,
output reg tx
);
// parameter
parameter SUB_1K = 1000 , // 缩减第十位,空闲位的时间。
CLK_UART = 50_000_000 ,
BPS = 9600 ;
localparam MAX_BPS = CLK_UART / BPS ;
// reg signal define
reg pi_flag_reg1 ;
reg [ 7:0] pi_data_reg1 ;
reg work_en ;
reg [12:0] cnt_bps ;
reg [ 3:0] cnt_bit ;
reg bit_flag ;
/**********************************************/
// reg pi_flag_reg1 ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
pi_flag_reg1 <= 1'b0 ;
else
pi_flag_reg1 <= pi_flag ;
end
// reg pi_data_reg1 ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
pi_data_reg1 <= 8'd0 ;
else
pi_data_reg1 <= pi_data ;
end
// reg work_en ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
work_en <= 1'b0 ;
else if(((cnt_bit == 4'd0) && pi_flag_reg1) || (cnt_bit == 4'd9) && (bit_flag))
work_en <= ~work_en ;
else
work_en <= work_en ;
end
// reg [12:0] cnt_bps ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_bps <= 13'd0 ;
else if(work_en && cnt_bps == MAX_BPS - 1) // 波特率计数器计数到最大值。
cnt_bps <= 13'd0 ;
else if(work_en)
cnt_bps <= cnt_bps + 1'b1 ;
else
cnt_bps <= 13'd0 ;
end
// reg bit_flag ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
bit_flag <= 1'b0 ;
else if((work_en && cnt_bps == MAX_BPS - 1) || (work_en && cnt_bps == MAX_BPS - SUB_1K && cnt_bit == 9))
bit_flag <= 1'b1 ;
else
bit_flag <= 1'b0 ;
end
// reg [ 3:0] cnt_bit ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
cnt_bit <= 4'd0 ;
else if(work_en && bit_flag && cnt_bit == 4'd9) // 传递完第十位,位计数器要归零。
cnt_bit <= 4'd0 ;
else if(work_en && bit_flag)
cnt_bit <= cnt_bit + 1'b1 ;
else if(work_en)
cnt_bit <= cnt_bit ;
else
cnt_bit <= 4'd0 ;
end
/****************************************/
// output signal
// tx
always @(posedge sys_clk or negedge sys_rst_n) begin
if(~sys_rst_n)
tx <= 1'b1 ;
else if(work_en) begin
case (cnt_bit)
0 : tx <= 1'b0 ;
1 : tx <= pi_data_reg1[0] ; // 先发最低位。
2 : tx <= pi_data_reg1[1] ;
3 : tx <= pi_data_reg1[2] ;
4 : tx <= pi_data_reg1[3] ;
5 : tx <= pi_data_reg1[4] ;
6 : tx <= pi_data_reg1[5] ;
7 : tx <= pi_data_reg1[6] ;
8 : tx <= pi_data_reg1[7] ;
9 : tx <= 1'b1 ;
default: tx <= 1'b1 ;
endcase
end else begin
tx <= 1'b1 ;
end
end
endmodule
`timescale 1ns/1ns
module test_spi();
reg sys_clk ;
reg sys_rst_n ;
reg key_flag ;
wire miso ;
wire cs_n ;
wire sck ;
wire mosi ;
wire po_flag ;
wire [7:0] po_data ;
defparam memory.mem_access.initfile = "initmemory.txt";
defparam spi_inst.CNT_MAX_SEND = 100 ;
m25p16 memory (
.c ( sck ) ,
.data_in ( mosi ) ,
.s ( cs_n ) ,
.w ( 1'b1 ) ,
.hold ( 1'b1 ) ,
.data_out ( miso )
);
spi spi_inst(
.sys_clk ( sys_clk ) ,
.sys_rst_n ( sys_rst_n ) ,
.key_flag ( key_flag ) ,
.miso ( miso ) ,
.cs_n ( cs_n ) ,
.sck ( sck ) ,
.mosi ( mosi ) ,
.po_flag ( po_flag ) ,
.po_data ( po_data )
);
parameter CYCLE = 20 ;
initial begin
sys_clk = 1'b1 ;
sys_rst_n <= 1'b0 ;
key_flag <= 1'b0 ;
#(CYCLE) ;
sys_rst_n <= 1'b1 ;
#(CYCLE*10) ;
#(CYCLE * 100) ;
key_flag <= 1'b1 ;
#(CYCLE) ;
key_flag <= 1'b0 ;
end
always #(CYCLE/2) sys_clk = ~sys_clk ;
endmodule仿真波形:

上版验证通过。