i.MX8M Plus的人工智能机器小车功能
AGV 小车是基于 i.MX8M Plus 为主控实现的一款双驱差速小车。从上到下由摄像头、舵机控制板、舵机、i.MX8M Plus 核心板与底板、电池、电机、轮子等组成。

i.MX8M Plus 有以下 5 个职责:
控制小车电机,负责控制小车电机正反转。
控制摄像头舵机,负责控制摄像头舵机上下摆动。
获取摄像头数据,通过 OpenCV 实现摄像头数据获取以及处理。
识别算法部署,通过部署算法,实现识别等功能。
控制逻辑与控制算法:通过一些简单的判断逻辑和顺序逻辑实现代码的组合,通过 PID算法实现车体以及舵机与摄像头之间的闭环控制。
MX8M Plus的人工智能机器小车AGV自主导航
人工智能机器人小车是以I.MX8M Plus为主控,OpenCV为图像处理库,以流行的jupter Lab为开发工具,Python为主要编程语言,使用eIQ实现模型训练,然后部署到设备上,实现自动避障、物体跟随、颜色识别与追踪、防跌落等多种智能AI识别和硬件控制。
“摄像头采集数据→Opencv图像处理→NXP eIQ模型训练→TensorFlow Lite生成自动驾驶模型→PID算法实现车体/舵机/摄像头的控制”
AGV自主导航小车教程视频:

想要资料的可以联系我W-X,号码:yyzlab
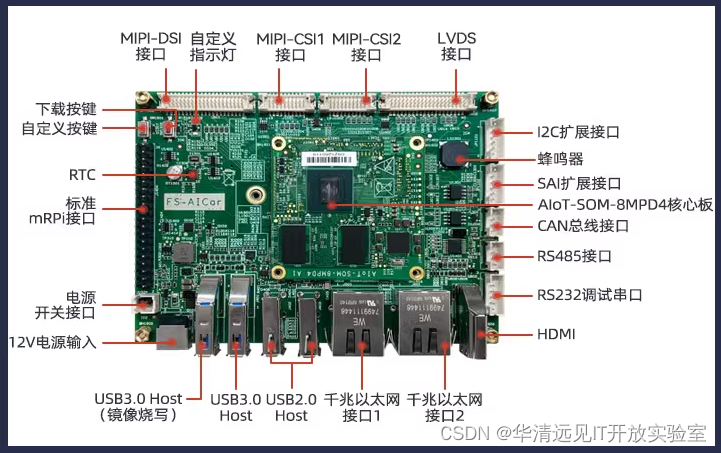
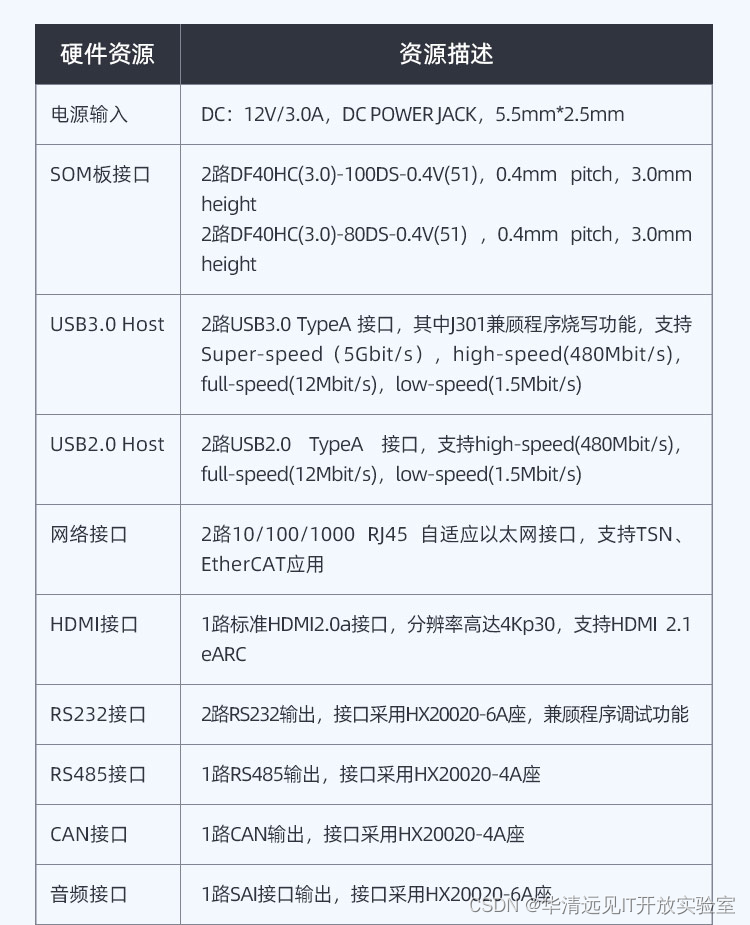
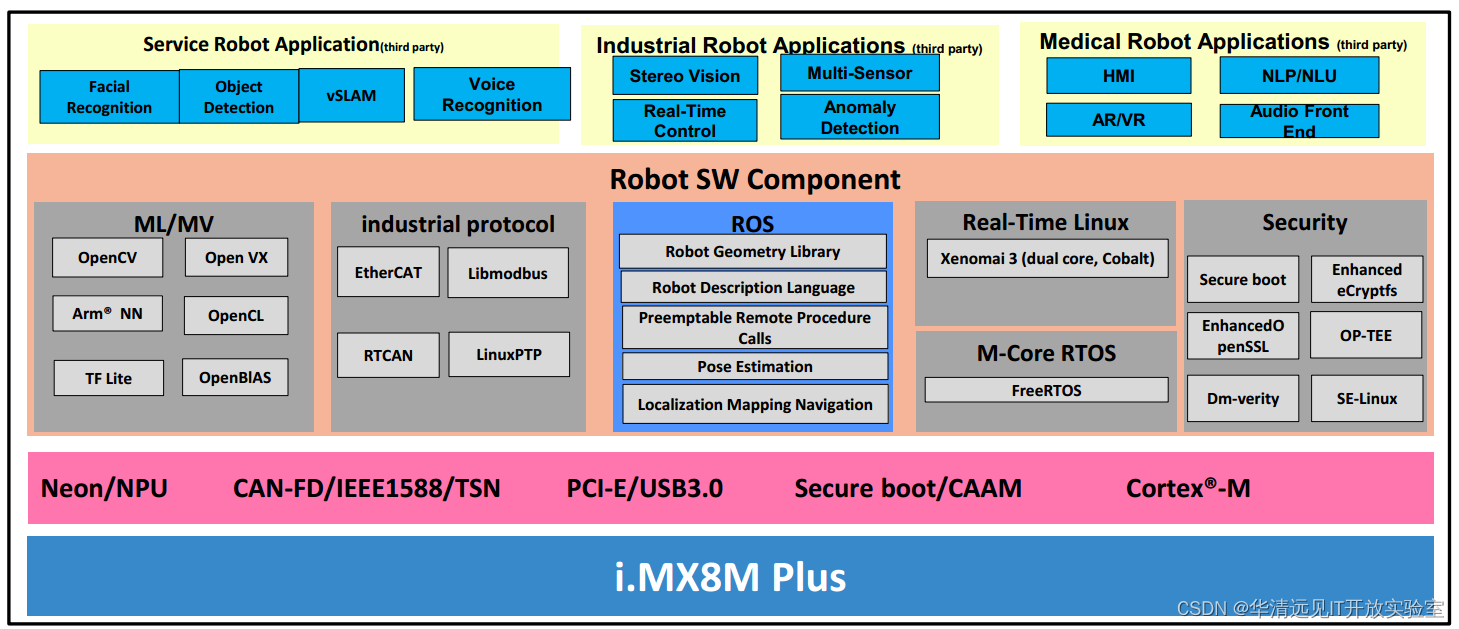
基于i.MX8M Plus的人工智能机器主控介绍
人工智能机器人主控采用NXP i.MX8M Plus应用处理器,这是一款致力于推动机器学习(ML),机器视觉,多媒体与工业边缘物联网应用的工业人工智能芯片。拥有4个ARM Cortex-A53核心,主频可达1.8GHz,1个Cortex-M7核心,主频800MHz。内部集成了神经网络加速单元(NPU),提供高达2.3TOPS的 边缘计算能力,能够在工业和物联网等领域为边缘端的机器学习提供了强大的性能支撑。可广泛应用于工业物联网、人工智能、边缘计算、多屏异显等应用方向。同时主控核心板采用DDR 容量4GB,eMMC容量32G,超大内存容量。
主控相关教程视频:






![2023年中国视频流媒体行业发展历程及趋势分析:未来市场规模趋于平稳[图]](https://img-blog.csdnimg.cn/img_convert/677db42c89a25a145e4a88655f7c3169.png)