大疆A3飞控使用|飞控配置
- 大疆A3飞控介绍
- 总体特性
- 飞行特性
- 外围设备
- 保护功能
- SDK拓展
- 拓展功能
- A3 飞控使用配置
- 连接飞机
- 基本设置
- 机架
- 安装
- 遥控器
- 电调
- 动力配置
- 感度
- 电池
- 控制参数调试
- 基础感度
- 动力带宽
- 高级感度
- 灵敏度
- 控制器性能参数
大疆A3飞控介绍

全新A3系列飞控系统结合安全可靠和精准控制的特性,以丰富的扩展功能和外设支持开创更多可能,全面满足行业应用的严苛需求。
总体特性
- 重量 :
A3 Pro : 386g
A3 :186g - 功耗 :
A3 Pro : 最大 16W
A3 : 最大 8W - 尺寸 :
主控: 64mm x 42mm x 19.5mm
PMU: 51 mm x 34mm x 13.5 mm
IMU: 34mm x 26.5mm x 20mm
GPS-Compass Pro: 61mm(直径) x 13mm
LED: 27mm x 27mm x 8mm - 内置功能 :
主控内置 IMU
智能飞行模式
低电压保护
DJI智能电池保护
动力保护
外接 SBUS 接收机
Lightbridge 2 接收机
包括4路可配置输出的8路功能通道
SDK
飞行特性
- 最大抗风能力 :
<10m/s - 最大偏航角速度 :
150 度/秒 - 最大倾斜角度:
35° - 最大升降速度 :
上升5m/s
下降4m/s
外围设备
-
支持多旋翼飞行器类型 :
四旋翼: I4,X4
六旋翼: I6,X6,Y6,IY6
八旋翼: X8,I8,V8 -
支持的电子调速器输出 :
400Hz 刷新频率 -
推荐电池类型
3S~12S 锂聚合物电池: -
工作环境温度
-10°C 至 +45°C -
系统配置要求 :
Windows 7 /8/10 (32 或 64 bit) -
外接接收机类型 :
Lightbridge 2, S-BUS,D-BUS -
支持外接DJI产品 :
Ronin-MX, S900, S1000, S1000+, iOSD, DATALINK PRO, D-RTK等.
保护功能
- 断桨保护 :
至少 6 旋翼 - 动力保护 :
动力饱和或载重过大 - 特殊区域保护 :
支持 - 低电量保护(DJI智能电池) :
智能返航 - 低电压保护 :
支持
SDK拓展
- SDK :
Mobile SDK
Onboard SDK - SDK 接口 :
API /CAN2
拓展功能
- PWM输入输出 :
F1-F4输出,F5-F8输入输出可切换 - IOSD数据储存 :
内置存储设备 - 地面站 :
搭配LIGHTBRIDGE 2,DJI GO APP可实现
搭配LIGHTBRIDGE 2或者DATALINK PRO, PC 地面站可实现 - 智能飞行模式 :
搭配LIGHTBRIDGE 2可实现航向锁定,返航点锁定,兴趣点环绕,航点模式 - 远程调参 :
搭配LIGHTBRIDGE 2,DJI GO APP可实现 - PC调参 :
全新的DJI ASSISTANT,支持模拟器
A3 飞控使用配置
在装好A3飞控在飞机上后,还需要一些配置,才可以进行飞机的试飞
参数设置软件:DJI Assistant 2
软件下载地址:https://www.dji.com/cn/a3/info#downloads

按照正常exe软件安装即可
连接飞机
软件初始界面,等待飞机连接

飞机上电后,软件识别到飞机后,USB有个自动的动画插入,即可打开对应的飞控
基本设置
机架
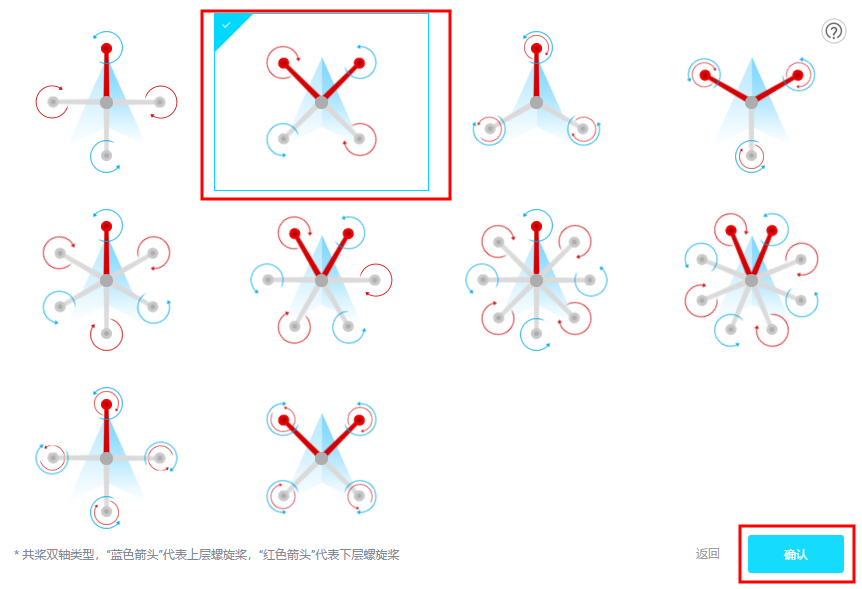
机架根据自己的飞机选择对应机架,然后点击确认。
可以根据上面的图片中的说明A3飞控支持这些无人机类型
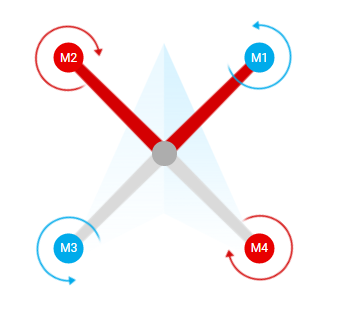
注意电机的顺序,对应的电调线要接到对应的通道。
A3飞控是右前是1号电机,左前是2号电机,左后是3号电机,右后是4号电机
同时注意电机转向
安装

将GPS的位置,根据图中的坐标系,填写对应的距离,注意单位是mm
遥控器

设置遥控器3档开关的对应模式
校准遥控器,将各通道拨到最大最小位置
电调
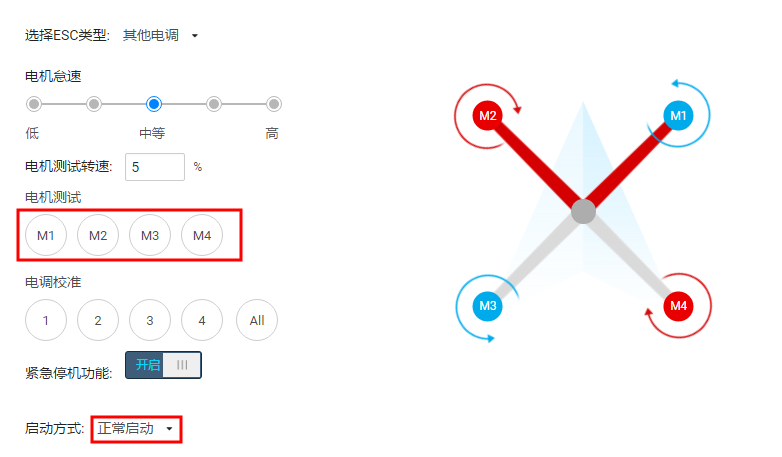
启动方式最好改成正常启动,否则解锁后,电机是挨个转的,看着很别扭
可以点击框中的 电机测试 M1 M2 M3 M4
此时电机会转,需要检查
- 1 电机的序号是否和标的一致
- 2 电机的转向是否和标的一致
动力配置
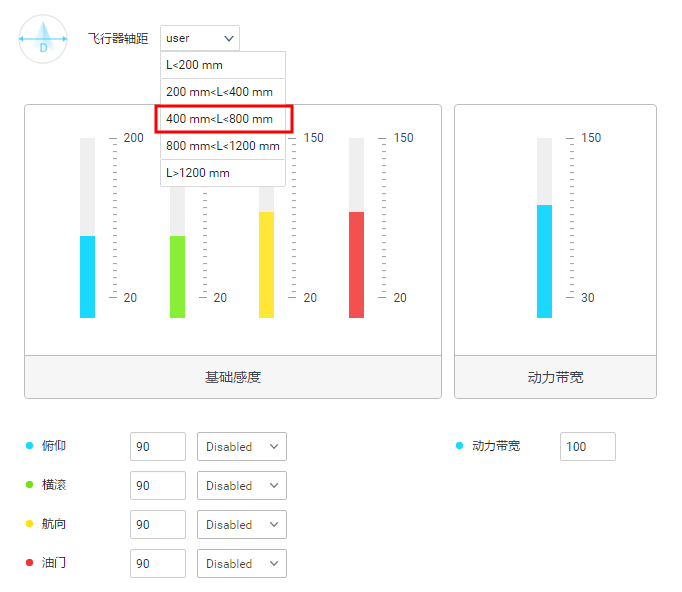
选择对应的轴距
会有个基础的数值,这个数值可以根据飞机的飞行表现再进行相应调节
感度
可调节的参数有上面红框的几个
具体如何调节,在下节讲解
电池

设置低电压报警的数值
控制参数调试
基础感度
什么使基础感度
不同的机架、电机与螺旋桨类型决定了不同的基础感度,根据配置的不同选择合适的感度值
俯仰、横杆和航向的基础感度与飞行器尺寸和惯量有关。飞行器尺寸越大,惯量越大,建议增加基础感度,飞行器尺寸越小,惯量越小,建议减小基础感度
油门的基础感度对应着飞行器的推质比(推力/质量)。如飞行器质量越大,油门感度越大,飞行器质量越小,油门感度越小。
如何调节基础感度
以俯仰为例,在打俯仰杆之后马上松杆,如果飞机在回到悬停过程中的反应较慢,较为柔软,则可以适当增加俯仰通道的基础感度(每次增加10%)直到松杆后的瞬间,飞机出行震动状态,此时再略微降低感度到正好震动消失,则感度较为合适。
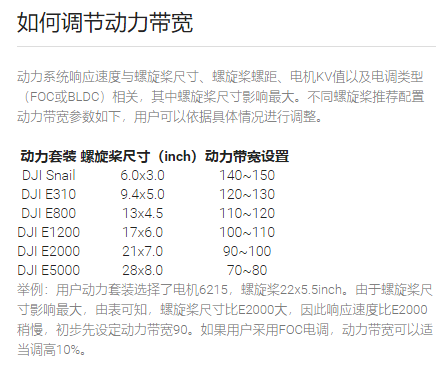
动力带宽
什么是动力带宽
动力系统(电机、电调、螺旋桨组合)的加减速快慢。动力系统加减速度越快,动力带宽设置越高。
系统动力加减速度快慢与螺旋桨尺寸、电机尺寸、螺旋桨螺距、电调类型等因素有关。
螺旋桨越大、电机越大,则惯量越大,响应就越慢
螺旋桨螺距越大,表示反扭矩系数越大,那么加减速响应越慢
其中螺旋桨的影响最大。
电机 4120 15寸桨 1555
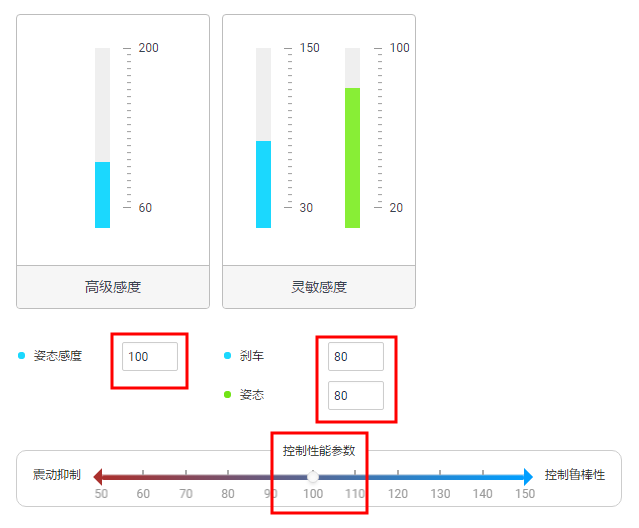
高级感度
什么是高级感度
高级感度对应姿态感度,不同与姿态灵敏度,它与飞行器的物理模型有关。
姿态感度太高会造成控制感受过于僵硬,严重时会导致飞行器超调失控;
感度太低则会造成控制感受过于柔和
如何调节高级感度
每次调节10%,直到飞机的打杆控制不会过于僵硬,也不会过于柔和。
灵敏度
什么时灵敏度
灵敏感度用于调整飞行器对遥控器输入指令的响应灵敏度,分为刹车灵敏感度和姿态灵敏感度。
刹车灵敏感度值越大,刹车响应速度越快,刹车距离越短。
姿态灵敏感度不同于姿态高级感度,它与飞行器的物理模型无关,灵敏感度值越大,飞行器对遥控器的输入指令响应越快,飞行跟踪摇杆的速度越快
如何调节灵敏感度
刹车灵敏感度每次调节10%,直到飞机具有合适的刹车响应和刹车距离。
姿态灵敏感度每次调节10%,直到飞机具有合适的打杆姿态响应速度。
控制器性能参数
什么是控制器性能参数
控制器性能参数用来权衡控制器震动抑制能力与控制器鲁邦性能。
越靠近震动抑制,控制器对机架震动抑制能力越好
反之,控制器对飞机重量变化、螺旋桨失效等结构变化越不敏感,控制器适配性更好,表现更鲁棒
如何调节控制器性能参数
飞机悬停如果出现高频抖动,电机输出噪声比较大,则可以将性能参数偏向震动抑制。
调节时每次调节一个刻度,直到高频抖动消除。在没有震动的情况下,不推荐调节该参数。