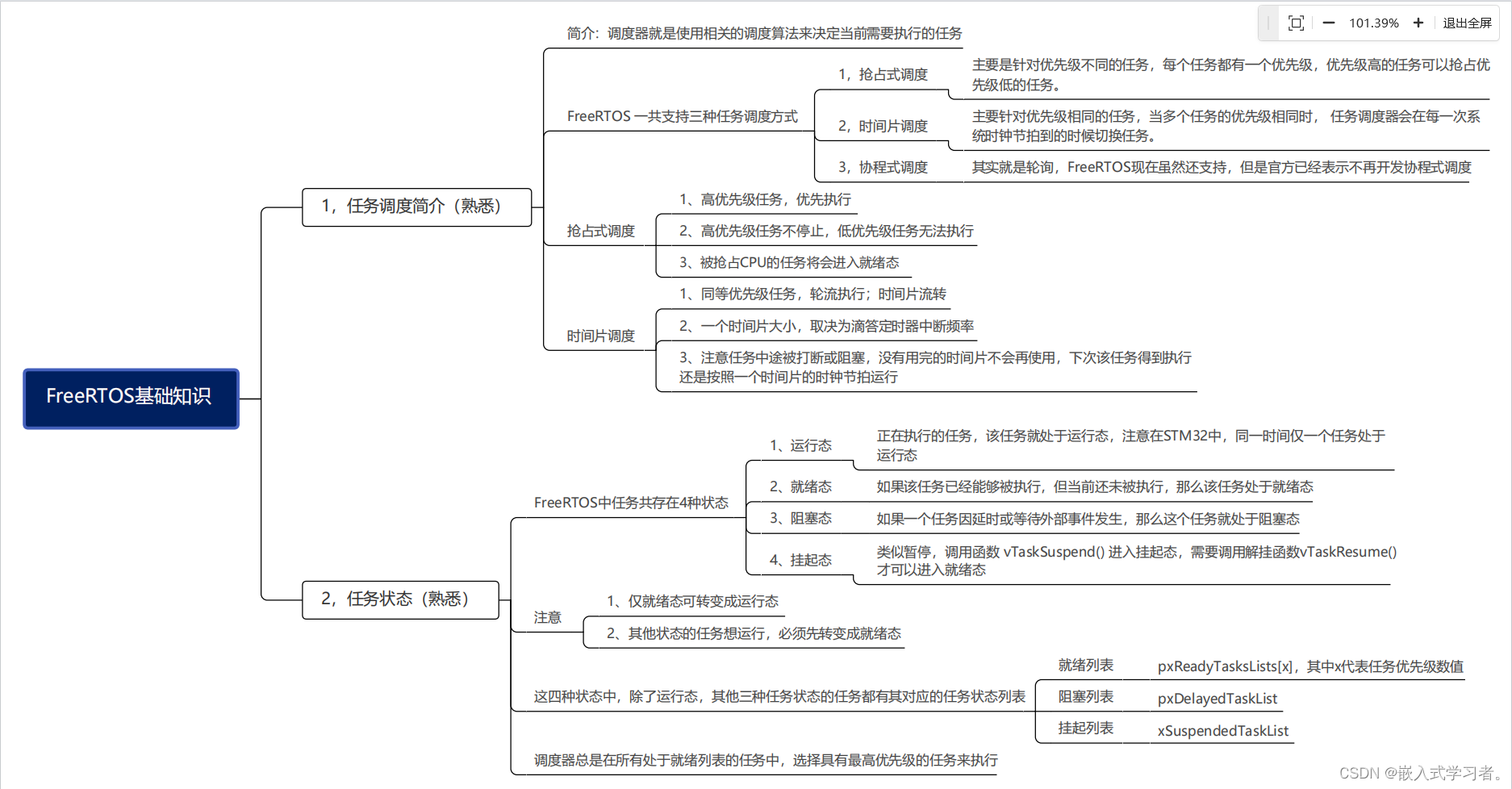
一、基础知识思维导图
vtaskdelay函数会开启中断,所以在临界区不能用vtaskdelay
二、任务的创建与删除
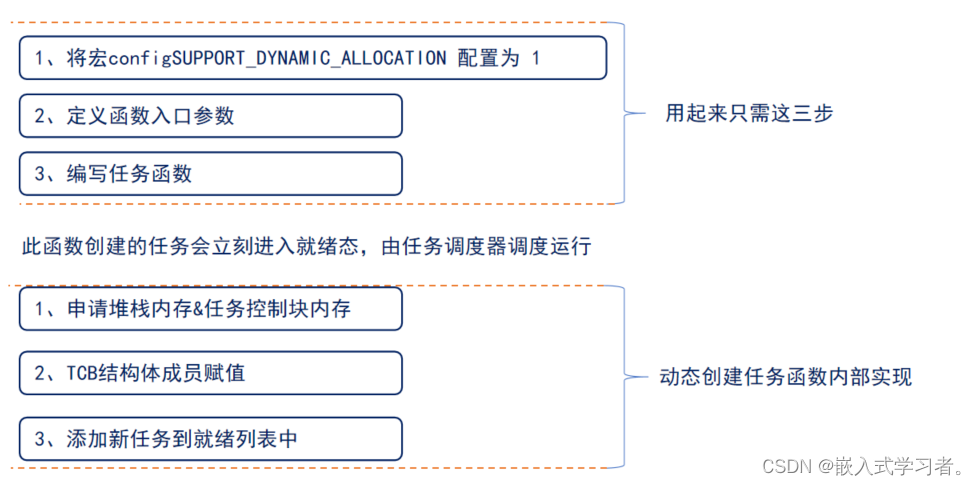
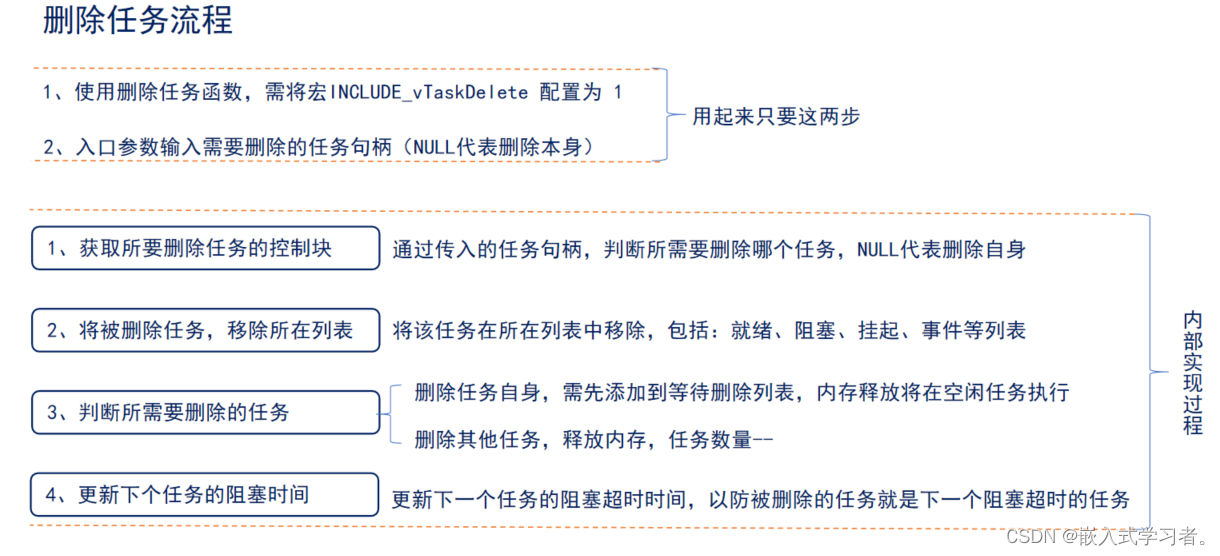
2.1、任务的动态创建与删除
........
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
.........
int main()
{
.......
xTaskCreate((TaskFunction_t ) start_task, //任务函数名
(char * ) "start_task",
(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE, //任务堆栈大小
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO, //任务优先级
(TaskHandle_t * ) &start_task_handler ); //任务句柄
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
vTaskDelete(NULL); //删除任务
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
三、任务的恢复与挂起
/* 任务三,判断按键KEY0,按下KEY0删除task1 */
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
key = key_scan(0);
if(key == KEY0_PRES) //按键一按下
{
printf("挂起task1\r\n");
vTaskSuspend(task1_handler); //任务挂起函数,使用时需将宏 INCLUDE_vTaskSuspend 配置为1。
}else if(key == KEY1_PRES) //按键二按下
{
printf("在任务中恢复task1\r\n");
vTaskResume(task1_handler);
}
vTaskDelay(10);
}
}
如果在中断中用恢复函数需要在函数后带FromISR后缀,vTaskResumeFromISR()
四、freertos中断管理
系统所管理的优先级范围:5~15,也就是说优先级在0-4以内的中断freertos不能控制它们。
五、FreeRTOS临界段代码保护及任务调度器挂起和恢复
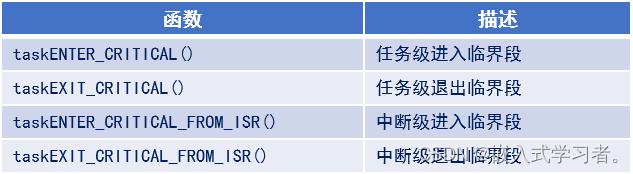
5.1、临界代码段
什么是临界段:临界段代码也叫做临界区,是指那些必须完整运行,不能被打断的代码段,如:iic、spi的初始化等。

5.2、任务调度器的挂起与恢复
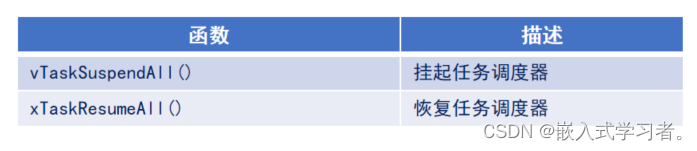
1、与临界区不一样的是,挂起任务调度器,未关闭中断;
2、它仅仅是防止了任务之间的资源争夺,中断照样可以直接响应;
3、挂起调度器的方式,适用于临界区位于任务与任务之间;既不用去延时中断,又可以做到临界区的安全;
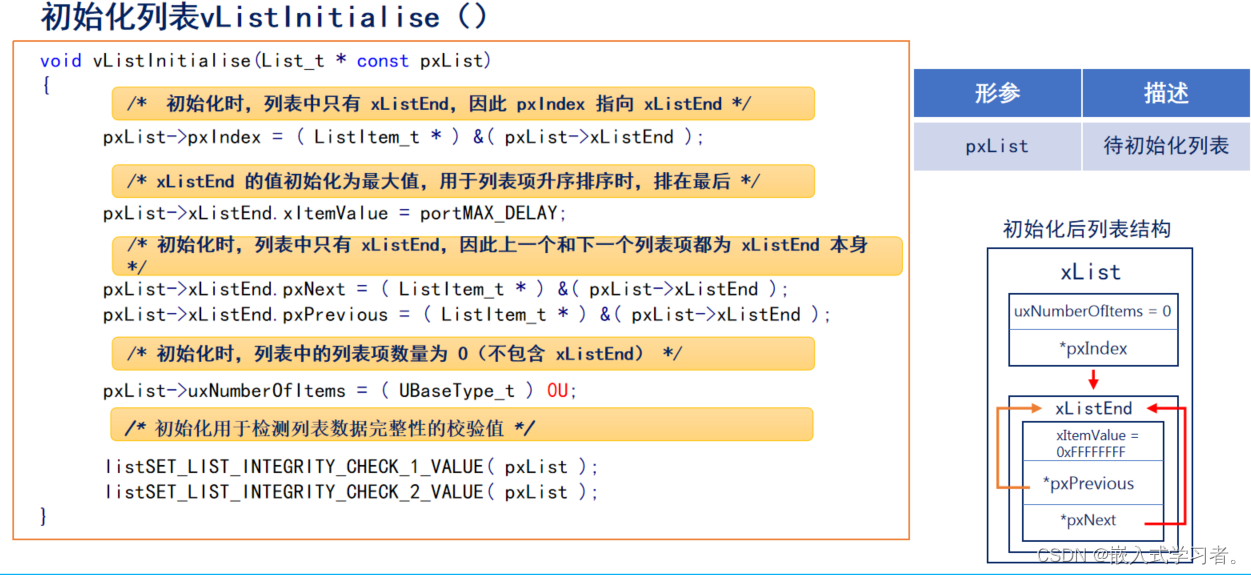
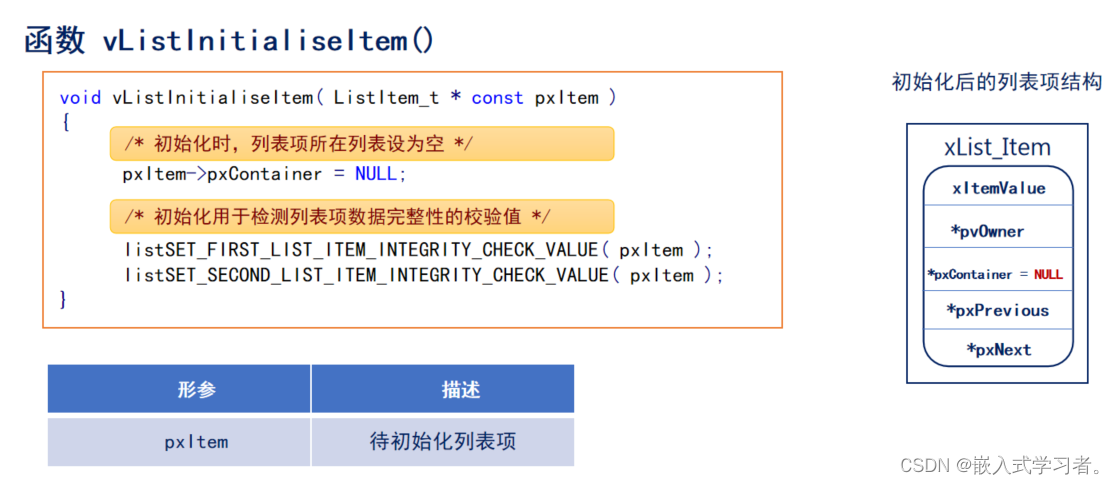
六、FreeRTOS列表和列表项
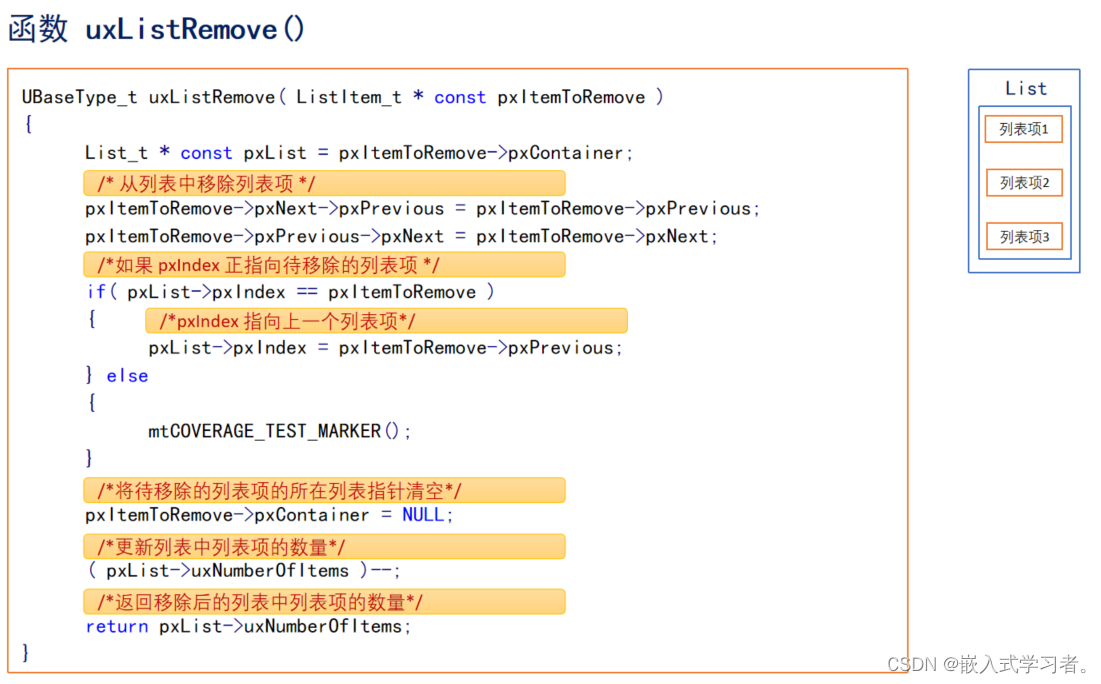
6.1、列表相关API函数
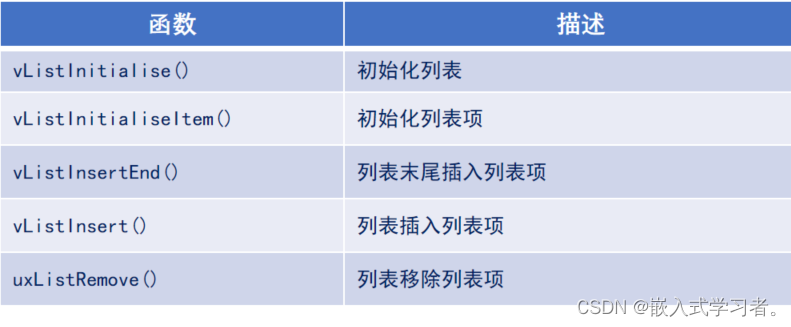
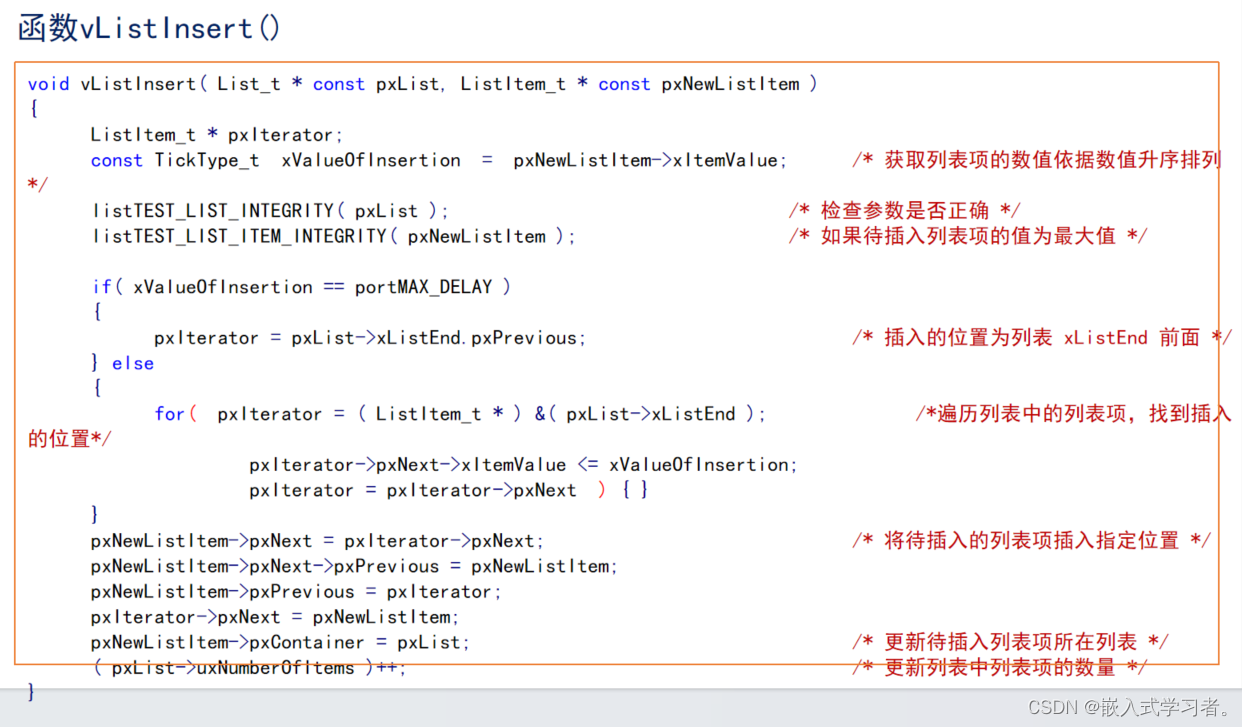
总结:函数vListInsert(),是将待插入列表的列表项按照列表项值升序进行排序,有序地插入到列表中
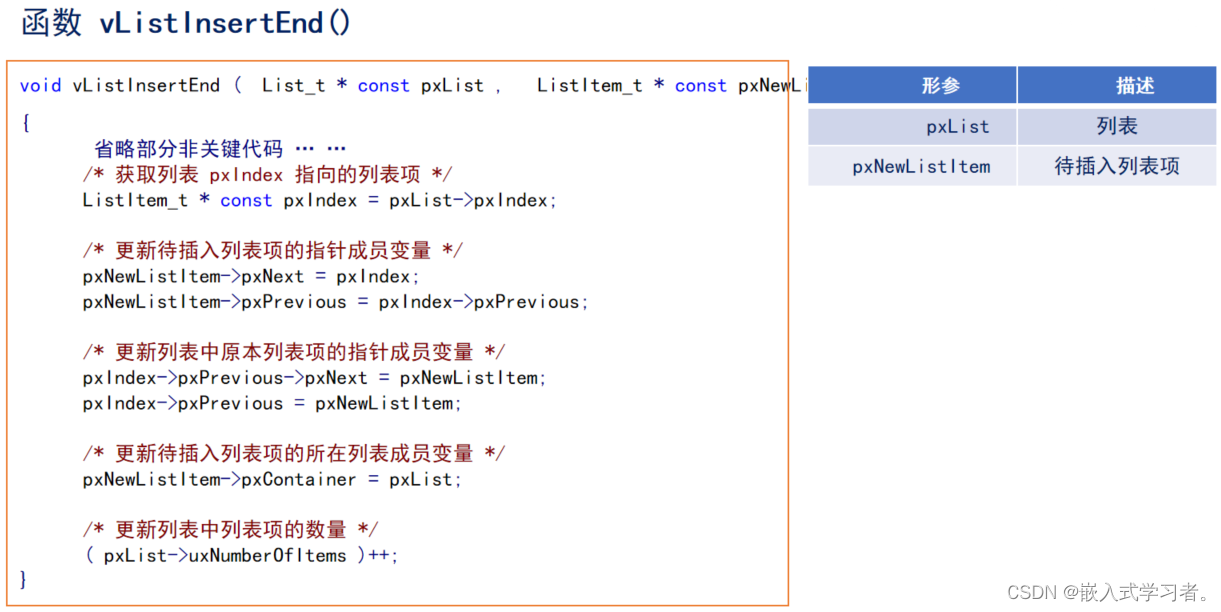
总结:函数vListInsertEnd(),是将待插入的列表项插入到列表 pxIndex 指针指向的列表项前面;它是一种无序的插入方法!!

七、任务调度
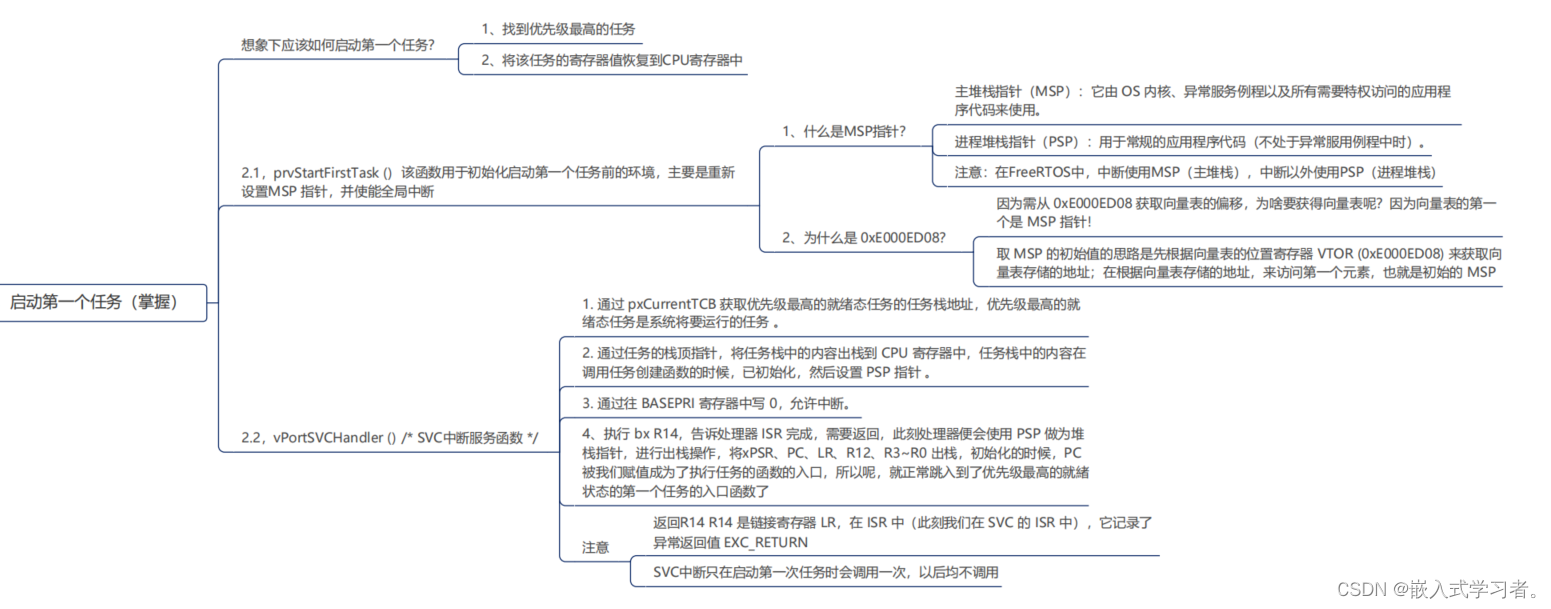
7.1、启动第一个任务
prvStartFirstTask () /* 开启第一个任务 */
vPortSVCHandler () /* SVC中断服务函数 */
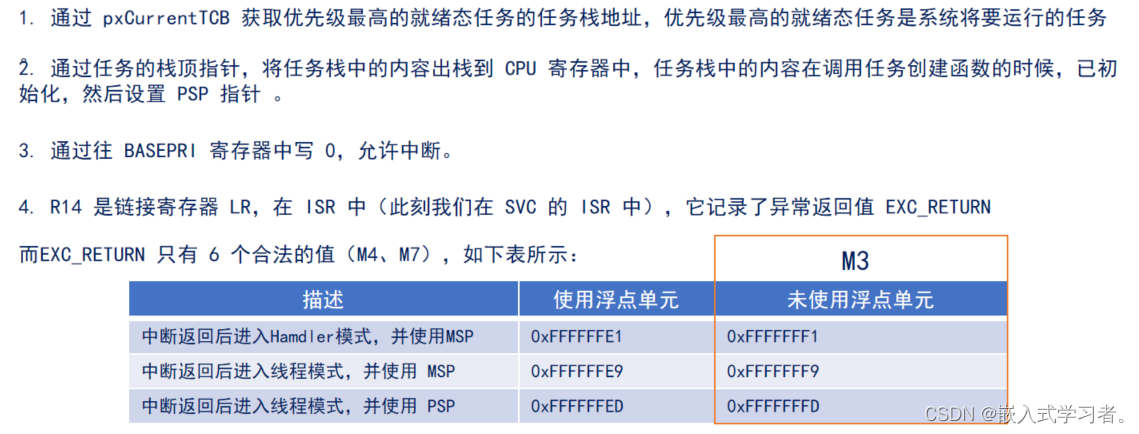
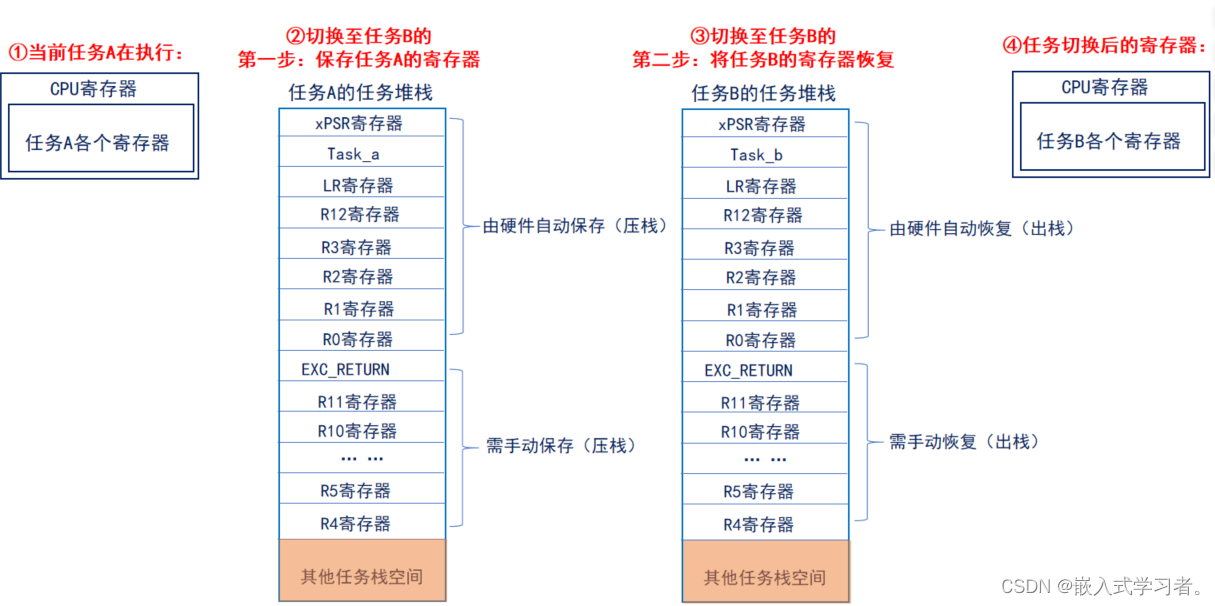
1、中断产生时,硬件自动将xPSR,PC(R15),LR(R14),R12,R3-R0出/入栈;而R4~R11需要手动出/入栈
2、进入中断后硬件会强制使用MSP指针 ,此时LR(R14)的值将会被自动被更新为特殊的EXC_RETURN
7.2、prvStartFirstTask ()函数
用于初始化启动第一个任务前的环境,主要是重新设置MSP 指针,并使能全局中断
什么是MSP指针?
程序在运行过程中需要一定的栈空间来保存局部变量等一些信息。当有信息保存到栈中时,MCU 会自动更新 SP 指针,ARM Cortex-M 内核提供了两个栈空间:

为什么是 0xE000ED08?
因为需从 0xE000ED08 获取向量表的偏移,为啥要获得向量表呢?因为向量表的第一个是 MSP 指针!取 MSP 的初始值的思路是先根据向量表的位置寄存器 VTOR (0xE000ED08) 来获取向量表存储的地址;在根据向量表存储的地址,来访问第一个元素,也就是初始的 MSP
CM3 允许向量表重定位——从其它地址处开始定位各异常向量 这个就是向量表偏移量寄存器,向量表的起始地址保存的就是主栈指针MSP 的初始值
7.3、vPortSVCHandler ()
当使能了全局中断,并且手动触发 SVC 中断后,就会进入到 SVC 的中断服务函数中
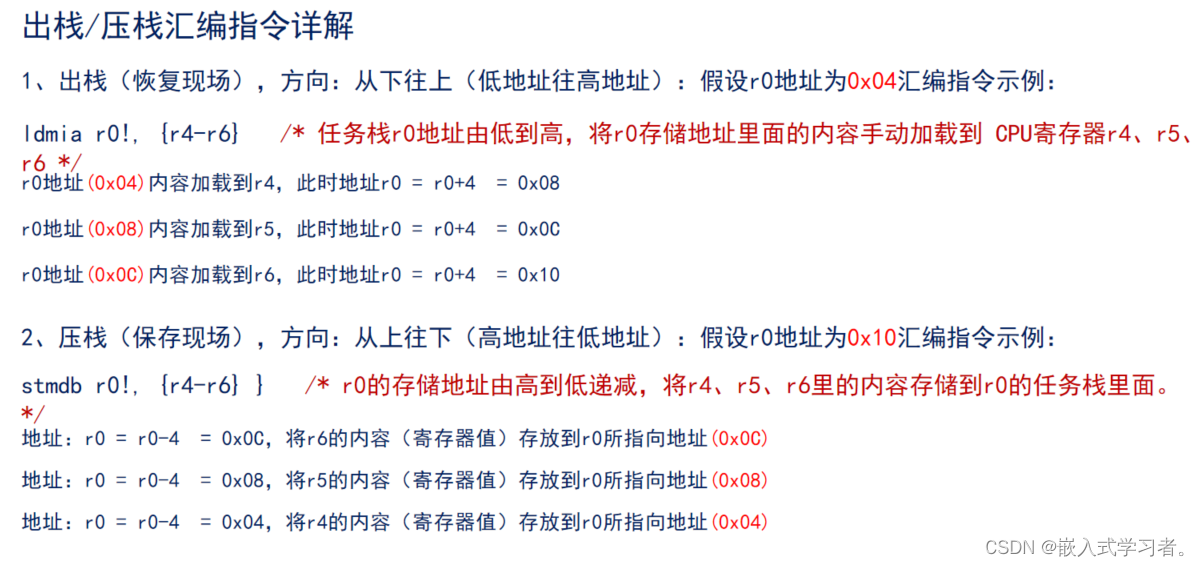
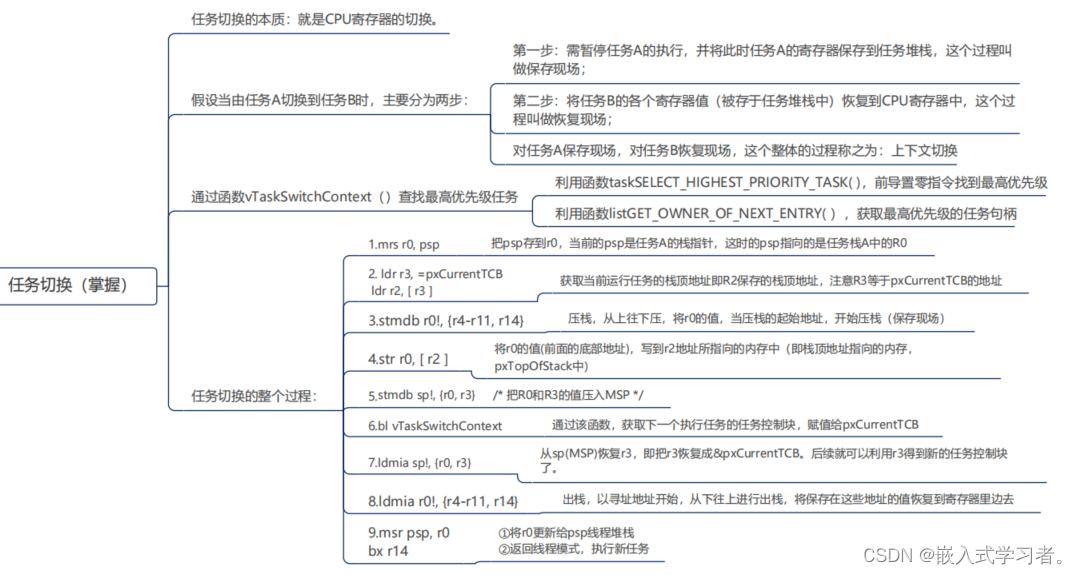
7.4、任务切换
任务切换的本质:就是CPU寄存器的切换。
注意:任务切换的过程在PendSV中断服务函数里边完成
PendSV中断是如何触发的?
1、滴答定时器中断调用
2、执行FreeRTOS提供的相关API函数:portYIELD()
本质:通过向中断控制和状态寄存器 ICSR 的bit28 写入 1 挂起 PendSV 来启动 PendSV 中断
总结