注:该文为Automatic Segmentation of Overlapping Cervical Smear Cells based on Local Distinctive Features and Guided Shape Deformation的相关阅读注释和翻译
基于局部特征和引导形状变形的重叠子宫颈细胞自动分割技术
概述
-
提出了一种基于独特的局部特征和引导稀疏形状变形的子宫颈细胞簇中的细胞核和细胞质自动分割技术。
-
使用ISBI 2014挑战数据集,共包含135个合成细胞图像,共计810个细胞
-
实验分为两个阶段进行
- 分割细胞核和细胞簇
- 进行重叠细胞质的分割
-
第一阶段:使用支持向量机(SVM)对图像超像素的局部鉴别形状和外观线索进行合并和分类,将图像分割为细胞核、细胞簇和背景。
-
第二阶段:利用稀疏编码(SC)理论,在代表性形状特征的方式下,提出了一种鲁棒形状变形框架,构建出每个重叠细胞的细胞质形状,之后利用距离正则化水平集演化(DRLSE)模型对得到的形状进行细化。
1.引言
In this paper, we propose a two-stage segmentation technique for the nuclei and cytoplasm of overlapping cells. We have incorporated discriminative shape and appearance cues that sufficiently distinguish the nuclei and the background in superpixel representation level. These superpixel-based features are then used to train the supervised SVM to separate the nuclei and cell clusters from the background. In the second stage, there is a cytoplasmic segmentation using sparse shape deformation that is guided toward the target shape using representative features captured from a wellestablished initial shape. The obtained shape is refined by the distance regularized level set evolution (DRLSE) model to obtain more accurate cell segmentation.
在本文中,提出了一种两阶段分割重叠细胞和细胞核的细胞质。在超像素表示水平上加入了区分形状和外观线索,以此区分细胞核核和背景。然后,这些基于超像素的特征被用来训练有监督的SVM,从背景中分离出细胞核和细胞簇。在第二阶段,使用稀疏形状变形的细胞质分割,利用从一个确定的初始形状中捕获的代表性特征,引导到目标形状。通过距离正则化水平集演化(DRLSE)模型对得到的形状进行细化,以获得更准确的细胞分割
2. 文献综述
技术 关键词:
- 梯度阈值化
- 形态学操作
- …
3. 基于重叠核和细胞质分割方法
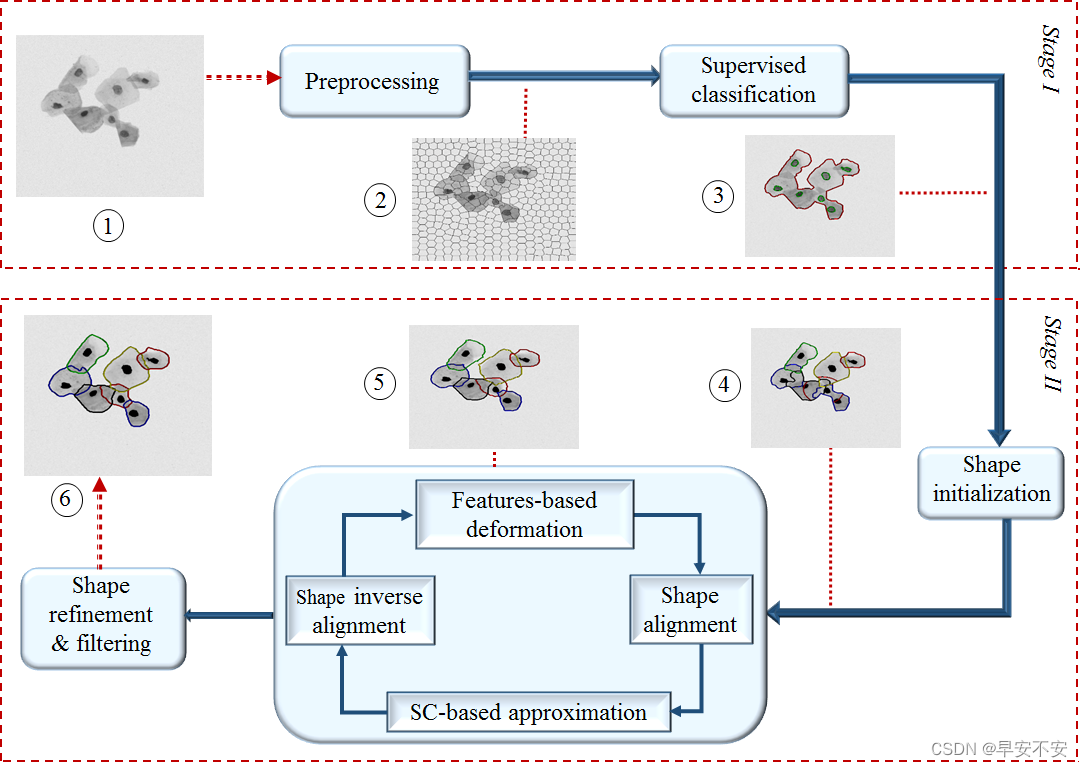
准确的宫颈细胞分割应该能够识别背景细胞和单个细胞的细胞核和细胞质。我们提出的方法的工作流程如图1所示,第一阶段进行核簇和细胞簇分割,第二阶段对重叠的细胞质进行分割。还进行了一个预处理步骤。整个算法流程如下
伪代码
Input: Pap smear image
Output: Individual nucleus and cytoplasm of free-laying and overlapping cells.
第一阶段:细胞核和细胞团块的分割
1.从
I
I
I开始计算
S
L
I
C
SLIC
SLIC超像素映射
2. 预处理,消除噪声,突出边缘
3. 提取形状、纹理和边界特征,并训练SVM。假设N为在这一阶段检测到的核数
第二阶段:细胞质分割
for i = 1 to N
If isolated cell: go to step (9), else:
1.生成两个边贴图,并在需要时完成遗漏的边
2. 根据计算出的ROI中包含的封闭轮廓物体生成初始的细胞质形状
3. 提取最有可能代表目标轮廓的初始细胞质形状的特征点Fp
4. 利用特征点
F
p
F_p
Fp和子字典
Φ
F
ΦF
ΦF对初始稀疏形状进行稀疏近似,得到稀疏解
X
F
X_F
XF。然后,利用
Φ
i
n
Y
o
=
Φ
X
F
Φ\enspace in\enspace Y_o = ΦX_F
ΦinYo=ΦXF中最相对的形状重建初始形状
for j =1 to predefined number of SC iterations
- 使用字典 Φ Φ Φ中的形状模板稀疏地变形单元格形状
- 根据特征点变形输出形状 Y o Y_o Yo。 F p F_p Fp坐标用于构造将输出形状与目标形状空间对齐的变换
- 将 F p F_p Fp分配给输出形状的对应点,以保留形状信息
- 在输出形状上应用移动平均滤波器来识别形状的连通性和规律性要求
end
9. 用DRLSE来细化变形的形状
10. 根据当前的阈值过滤出较小的候选对象
end
超像素
超像素由一系列位置相邻且颜色、亮度、纹理等特征相似的像素点组成的小区域。这些小区域大多保留了进一步进行图像分割的有效信息,且一般不会破坏图像中物体的边界信息。
超像素是吧一幅像素级(pixel-level)的图,划分成区域级(district-level)的图,是对基本信息元素进行的抽象。

超像素最大的功能之一是作为图像处理其他算法的预处理,在不牺牲太大精确度的情况下降维。
超像素最直观的解释是把一些具有相似特性的像素“聚合”起来,形成一个更具有代表性的大“元素”。而这个新元素,将作为其他图像处理算法的基本单位。这样可以降低维度,剔除一些异常像素点。
理论上,任何图像分割算法的过度分割(over-segmentation)即可生成超像素。
图像分割中的超像素是指具有相似纹理、颜色、亮度等特征的相邻相似构成的具有一定意义的不规则的像素块。它利用像素之间特征的相似性将像素分组,用少量的超像素代替大量的像素来表达图像特征,很大程度上降低了图像处理的复杂度,所以通常作为分割算法的预处理步骤。
3.1 预处理
使用超像素级别工作(superpixel level),而非像素网格级别进行工作。超像素通过整合局部强度和位置信息来表示同质区域。因此,超像素级提取特征可以更好地表述局部特征之间的差异。超像素保留了图像边界,因为超像素的边界与真实图像边界非常匹配,同时也降低了计算成本。超像素形状的差异也有助于区分局部区域,这是我们在我们方法中使用的设计的形状描述符的原理。
预处理:使用线性迭代聚类(SLIC)算法将图像分割成与细胞核、细胞簇和背景对应的局部平滑区域。当使用适当的超像素大小和正则化值时,SLIC算法保证了平滑区域的更规则的形状。将巴氏图像分割成规则形状的超像素,可以更容易地根据超像素的形状来区分细胞核和背景。在某些情况下,原子核可能被分为两个超像素,影响椭圆形状的性质。
然而,大多数的核超像素仍然可以根据超像素级的纹理和边界特征进行正确的分类。例如,图2中的细胞核(a)被分为两个超像素,其中两者都比周围的细胞质超像素强度更低,纹理更平滑,和更多的边界像素。因此,代表核(a)的两个超像素被正确地归类为核超像素,如图1(3)所示。这一步的输出是一个超像素的映射,每个超像素标记在[1,#SP]范围内的整数,其中#SP是由SLIC算法确定的图像中超像素的总数。
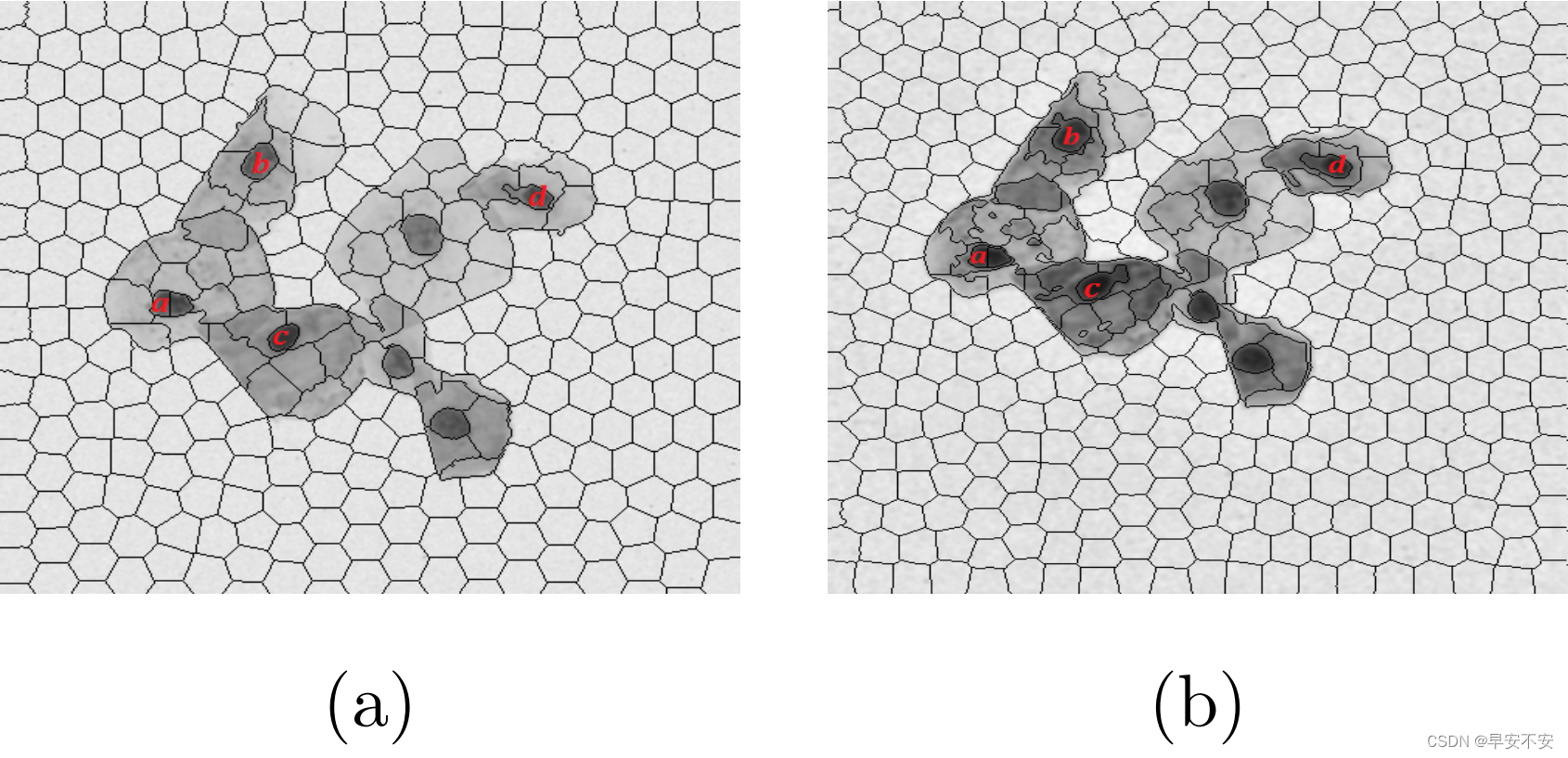
增强图像的外观和减少噪声,图像 I I I与高斯滤波器和均衡的对比有限自适应直方图均衡(CLAHE)小阈值γ,即0.005增强核的对比由于细胞质重叠。在这一增强步骤之前生成超像素的原因是为了防止细胞质的过度分割,并在核超像素中包括细胞核周围的暗区域(见图2)。
3.2 基于SVM的独特超像素级线索的细胞核和细胞簇分割
这里的目的是从背景中分离出细胞核和细胞簇。对于每个超像素
S
i
S_i
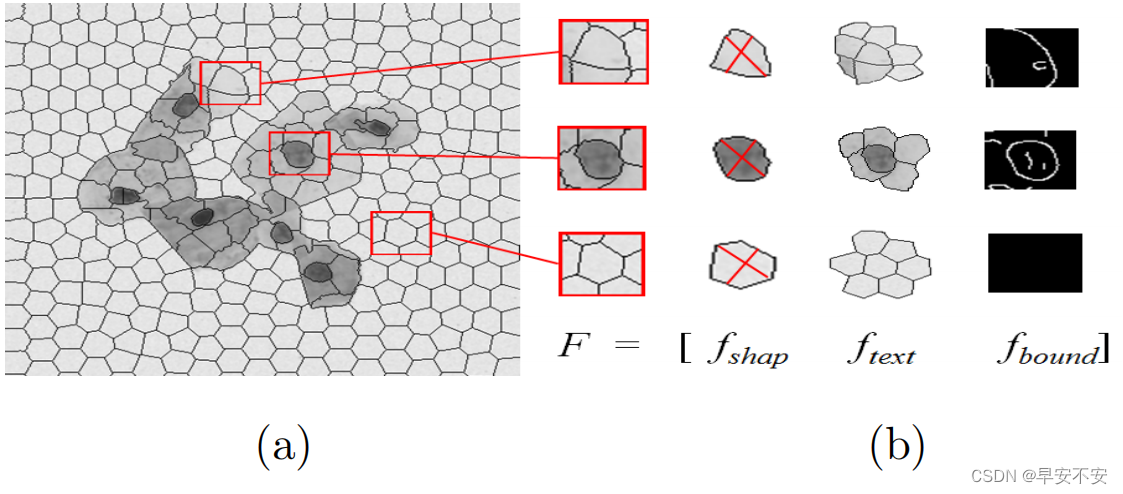
Si,提取局部超像素形状、纹理和边界线索,并排列为特征向量。特征设计的标准是基于超像素之间的纹理和几何差异,例如,核超像素倾向于具有椭圆形的形状,而细胞质超像素通常具有不规则的形状。在这些情况下,超像素的偏心度和小轴长度提供了一个很好的描述符。图3显示了特征提取过程。将从超像素
S
i
S_i
Si中获得的形状、纹理和边界特征组合为特征向量
f
(
S
i
)
f(S_i)
f(Si):
f
(
S
i
)
=
[
f
s
h
a
p
(
S
i
)
f
t
e
x
t
(
S
i
)
f
b
o
u
n
d
(
S
i
)
]
f(S_i)=[f_{shap}(S_i)f_{text}(S_i) f_{bound}(S_i)]
f(Si)=[fshap(Si)ftext(Si)fbound(Si)]
3.2.1 形状特征
在图3中可以发现,SLIC超像素的形状不均匀,核超像素趋于椭圆形,而背景超像素的形状为六角形,细胞质不规则。因此,可以由此推导出两个充分的形状特征:小轴长度
(
L
m
)
(L_m)
(Lm) 和过度延长或偏心度
(
E
C
)
(EC)
(EC)。小轴长度
L
m
L_m
Lm是完全包围超像素区域的椭圆的最短直径的长度(以像素),而偏心
E
C
=
1
−
(
L
m
/
L
x
)
2
∈
[
0
,
1
]
EC = \sqrt{ 1−(Lm/Lx)^2}∈[0,1]
EC=1−(Lm/Lx)2∈[0,1]是超像素的焦点和它的主轴长度
L
x
L_x
Lx之间的距离的比值,这提供了关于超像素的圆度的良好信息。形状特征以矢量fShap的形式排列如下:
f
s
h
a
p
(
S
i
)
=
[
L
m
(
S
i
)
E
C
(
S
i
)
]
f_{shap}(S_i) = [L_m(S_i)EC(S_i)]
fshap(Si)=[Lm(Si)EC(Si)]
3.2.2 纹理特征
核超像素通常通过与相邻超像素相比的均匀纹理和低强度值来区分。因此,利用一组基于直方图的特征和一个比较特征来捕获超像素的纹理属性。文章提取了4个标准的纹理特征:平均值
(
.
‾
)
(\overline .)
(.)。和像素强度的标准差
σ
σ
σ,梯度幅度
M
(
∇
)
M(∇)
M(∇)的中值,其中
∇
∇
∇提供梯度算子,超像素
S
i
S_i
Si的熵
H
H
H用于超像素纹理。我们还使用了一个比较特征
δ
(
S
i
,
B
i
)
=
∣
M
(
B
i
)
−
M
(
S
i
)
∣
δ(S_i,B_i)=|M(B_i)−M(S_i)|
δ(Si,Bi)=∣M(Bi)−M(Si)∣测量超像素
S
i
S_i
Si与其边界界面之间的强度变化,该像素位于预定义的欧氏距离内。纹理特征向量因此可以写成:
f
t
e
x
t
(
S
i
)
=
[
S
‾
i
σ
(
S
i
)
M
(
∇
S
i
)
H
(
S
i
)
δ
(
S
i
,
B
i
)
]
f_{text}(S_i)=[\overline S_i σ(S_i)M(∇S_i)H(S_i)δ(S_i,B_i)]
ftext(Si)=[Siσ(Si)M(∇Si)H(Si)δ(Si,Bi)]
3.2.3 边界特征
边界特征的设计是用来区分核和细胞簇超像素,这是下一阶段最重要的超像素。一般来说,图像中的大部分边缘都出现在细胞核和细胞簇周围。即使背景上有一些由噪声产生的边,它们也会是短而不连接的边。预处理步骤还有助于降低背景噪声,突出核和簇边界。为此,我们选择了两个边界特征:超像素中的边数和每条边的长度,其中每条连接和孤立的边被认为是一条边。利用具有0.1阈值的
C
a
n
n
y
Canny
Canny边缘检测器获得边缘图,然后对边缘图中的连接分量进行标记和计数。边界特征有助于区分属于细胞核的超像素和属于细胞簇和背景的超像素。计算超像素中的连接边数
(
E
N
)
(E_N)
(EN)及其长度
(
E
l
e
n
)
(E_{len})
(Elen) (即每条边中的像素数),并将其组合为边界特征向量,形成:
f
b
o
u
n
d
(
S
i
)
=
[
E
N
(
S
i
)
E
l
e
n
(
S
i
)
]
f_{bound}(S_i)=[E_N(S_i)E_{len}(S_i)]
fbound(Si)=[EN(Si)Elen(Si)]
3.2.4 分级
最后,利用提取的基于超像素的特征向量将图像超像素分类为背景、细胞质和细胞核超像素。在分类方面,选择了一个线性支持向量机(SVM)分类器,特别是由 L I B S V M LIBSVM LIBSVM 软件包提供的 C − s u p p o r t C-support C−support向量分类 ( C − S V C ) (C-SVC) (C−SVC)算法,正则化参数 C = 1 C=1 C=1。SVM分类器在训练图像的所有标记的 S L I C SLIC SLIC超像素上进行训练。SVM已广泛应用于图像分割,并在处理显微镜图像中的复杂分割问题上证明了其有效性。
3.3 基于引导形状近似和DRLSE模型的重叠细胞分割
在这一阶段,通过形状初始化、近似化和变形过程来勾画出被检测到的细胞核的细胞轮廓。每个重叠细胞的细胞质形状可以通过在每个被检测到的细胞核周围建立一个代表初始细胞质的封闭区域,并基于训练形状和代表性特征进行稀疏形状学习,来估计每个重叠细胞的细胞质形状。最后,通过 D R L S E DRLSE DRLSE对得到的形状进行细化,以获得更准确的分割。重叠单元分割阶段分为基于边缘的形状初始化、基于引导稀疏编码 ( S C ) (SC) (SC)的形状变形和基于候选滤波的基于 D R L S E DRLSE DRLSE的细化。
3.3.1 基于边缘的形状初始化
该步骤中,基于封闭的轮廓物体建立了细胞质的初始形状。首先,根据前一阶段分类的簇的数量来识别分离的细胞。对于孤立的细胞,DRLSE模型的初始轮廓是直接由簇边界边缘的形态孔填充而形成的。在这种情况下,不需要基于稀疏编码的细胞质变形,因为细胞边界是在分类阶段确定的。

如果细胞簇有两个或两个以上的细胞核,则应用Canny边缘检测器提取细胞边缘。由于宫颈图像的复杂性,很难使用单一阈值来识别一幅图像中所有细胞的边界。例如,使用具有高阈值的Canny探测器,可以识别出具有明显强度差异的接触或重叠细胞的边界。而对于一个具有收敛强度和不明确边缘的模糊细胞簇,需要一个较低的阈值来获得更详细的边缘来生成一个连接区域。另一方面,过多的边缘细节不会对接触或较少重叠较少的单元提供正确的描述,因为边缘可能将细胞分裂成多个部分或导致附着细胞的一部分包含在聚焦的单元中。由于预先确定图像中每个单元格的类别是困难的,我们选择使用两个不同的阈值建立两个单元格边缘映射:上阈值 β u β_u βu和下阈值 β l β_l βl,其中只有一个边缘映射将用于生成初始单元格掩模。这一步的结果是两个骨架化边缘地图为每个细胞,由应用精明的探测器两次上和下阈值的补充细胞集群(即,减少噪声的外观),并通过关闭边缘(磁盘半径Cr)后删除短的。最后,去除原子核的边界和未连接的边,得到连接的边图,如图4所示:
在对宫颈细胞的几何结构进行仔细分析的基础上,我们提出了根据周围边缘动态确定每个核的细胞质区域,位于合理的欧式距离
Γ
Γ
Γ内,不包括核边界。对于重叠簇中的每个核
n
n
n,确定了一个半径为
r
r
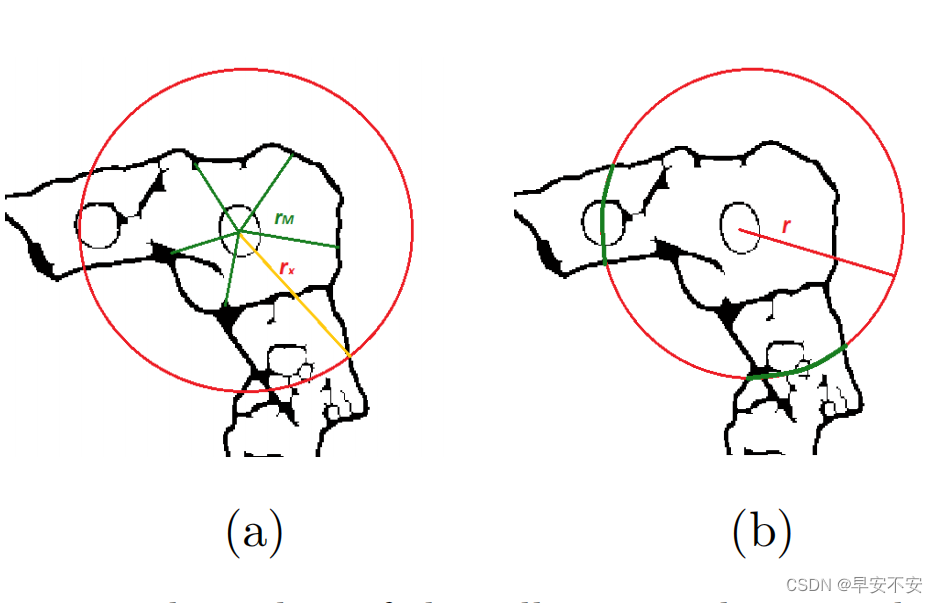
r的圆形兴趣区域(ROI)。通常,使用平均半径来确定ROI,其使细胞具有半圆形,细胞核位于细胞中心的合理初始化。然而,子宫颈细胞具有多种形式的形状,因此,使用平均半径来确定ROI可能会导致将部分细胞排除在搜索区域之外。基于我们的实证分析,我们的方法中的ROI半径r计算为最长径向长度(rx)的平均值和Γ中最常见的径向长度(rM)的平均值,以更高的权重到rx来应对细胞形状的变化(见图5(a)):
r
(
n
)
=
(
2
∗
r
x
(
n
)
+
r
M
(
n
)
)
/
3
r(n)=(2*r_x(n)+r_M(n))/3
r(n)=(2∗rx(n)+rM(n))/3
表示与n相关的单元掩模,简单地通过计算的ROI内的形态孔填充和关闭边缘图,在剔除面积和圆度小于阈值的候选对象(即整个图像大小的 τ c = 0.15 τ_c = 0.15 τc=0.15和 τ a = 0.01 τ_a=0.01 τa=0.01)后,选择具有最大凸面积的粗糙掩模。如果第一边缘映射(即,由上阈值 β u β_u βu生成)通过此步骤,则生成的单元掩模被用作后续步骤的初始单元形状,否则,两个边缘映射由像素级的排他或运算符融合在一起,并用于产生单元掩模。在融合的边缘地图也不能生成初始面具由于缺乏大量的边界像素或高不规则,ROI半径r的轮廓连接到第一个边缘地图的轮廓像素(例如,图5(b)中的绿线)。
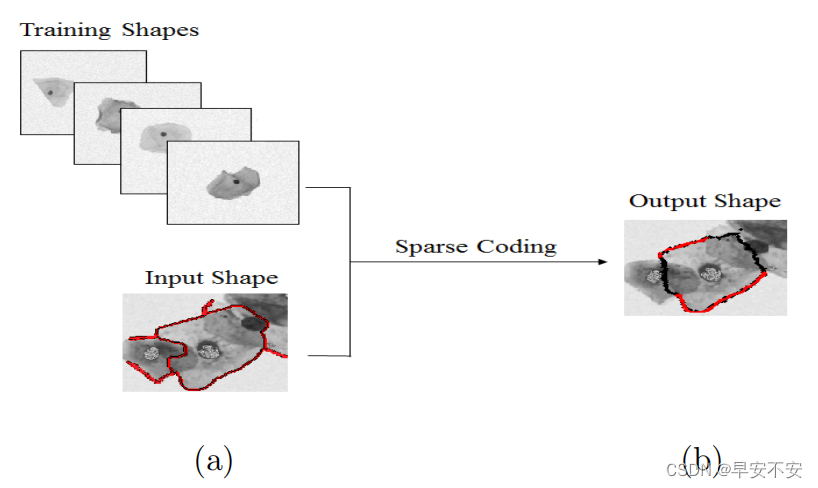
基于SC-based的形状变形
图6显示了SC-based的形状近似流程图,其中输入的形状可以在初始形状特征的指导下进行变形,并由带注释的训练单元形状构造出一个字典。解释如下:假设S表示一个二维输入形状,由N个轮廓点的坐标所提取、对齐并排列为向量 :
Y
=
[
x
1
、
y
1
,
x
2
,
y
2
,
.
.
.
,
x
N
,
y
N
]
T
∈
R
2
N
Y = [x_1、y_1,x_2,y_2,...,x_N,y_N]T∈R ^{2N}
Y=[x1、y1,x2,y2,...,xN,yN]T∈R2N
包含等高线点的x-y坐标:
L
e
t
Φ
=
[
Φ
1
,
Φ
2
,
.
.
.
,
Φ
M
]
∈
R
2
N
×
M
Let Φ = [Φ_1,Φ_2,...,Φ_M]∈R^{2N×M}
LetΦ=[Φ1,Φ2,...,ΦM]∈R2N×M
是由M个来自标注训练数据集的训练形状实例(即我们的实验中有270个形状实例)组成的形状字典。然后,形状S可以近似地表示为训练形状字典中相对较少的原子的线性组合。在数学上,
Φ
Φ
Φ对S的近似可以表示为以下稀疏编码问题:
arg
min
x
∣
∣
Y
T
−
Φ
X
∣
∣
2
2
s
.
t
.
∣
∣
X
∣
∣
0
<
s
\arg\min\limits_{x} ||Y_T-ΦX||^2_2 \qquad s.t. \qquad ||X||_0 < s
argxmin∣∣YT−ΦX∣∣22s.t.∣∣X∣∣0<s
其中 Y T Y_T YT是输入形状的对齐版本,使用普罗克鲁斯特斯的分析与参考训练形状将形状转换为标准坐标系。 X ∈ R M × 1 X∈R^{M×1} X∈RM×1是具有s非零项的 Y T Y_T YT的稀疏表示,即s=5。稀疏编码已成功地应用于许多分割问题。然而,这些方法的设计目的是针对形状与典型模板变化相对较小的物体(如肺和心脏)。子宫颈涂片细胞的较大的形状变化和高度的重叠,使得现有的基于sc的方法难以应用于我们的分割问题。
训练阶段
考虑我们有M训练宫颈细胞 C 1 、 C 2 . . . , C M C_1、C_2...,C_M C1、C2...,CM及其标记地面真理,每个训练细胞的形状向量是由连接的二维坐标边缘点关闭细胞形状,即 N = 360 N = 360 N=360边缘点,通过提取一个点在每个程度沿细胞轮廓,起源于核中心。选择其中一个训练形状作为参考形状,用于执行普罗克rustes的分析,将每个训练形状转换为参考形状的空间。将对齐的形状表示为 C i A , i = 1 , . . . , M C_i^A ,i = 1,...,M CiA,i=1,...,M 。为了消除参考文献选择中的偏差,选择对齐的训练形状的平均值作为新的参考文献 S r = ∑ M i = 1 ( C i A ) / M S_r=\sum_M^{i=1}(C_i^A)/M Sr=∑Mi=1(CiA)/M,并使用新的参考文献再次进行对齐过程。最后,将对齐的形状以向量(即 S i = [ x i 1 , y i 1 , x i 2 , y i 2 , . . . , x i N , y i N ] 、 i = 1 、 . . . , M ) S_i = [x_{i1},y_{i1},x_{i2},y_{i2},...,x_{iN},y_{iN} ]、i = 1、...,M) Si=[xi1,yi1,xi2,yi2,...,xiN,yiN]、i=1、...,M)排列,并存储在形状字典中。
变形阶段
首先,确定了一组用于指导近似信息过程的初始形状的特征点。详细地说,初始形状的轮廓点,属于细胞集群之间的边界和背景,包含在一个狭窄的细胞质域 Γ − ε Γ−ε Γ−ε(即,为了避免异常值),被标记为特征特征点 F p F_p Fp,例如图7(b).中的红色点考虑到第一个边缘图生成的规则细胞掩模的轮廓点很可能代表真实的细胞质轮廓,它们也可以作为生成的初始形状的特征点。提取的特征点用于指导下一个形状变形过程。
细胞质的变形从仅利用初始形状的 F p F_p Fp构造初始稀疏形状开始。 F p F_p Fp的稀疏解是在形状字典 ( Φ F ) (ΦF) (ΦF)中所有训练实例的计算中,使用一个只包含 F p F_p Fp对应点的子字典来计算的,可以使用特征点索引简单地提取。稀疏解 X F ∈ R M × 1 X_F∈R^{M×1} XF∈RM×1的计算方法如下:
arg min X F ∣ ∣ F p T − Φ F X F ∣ ∣ 2 2 \arg\min\limits_{X_F}||F_{pT}-Φ_FX_F||_2^2 argXFmin∣∣FpT−ΦFXF∣∣22
其中
F
p
T
F_{pT}
FpT是使用Procrustes分析的对应点使用特征点索引的
F
p
F_p
Fp的对齐版本。采用阶段正交匹配追求(StOMP)的低计算复杂度和吸引渐近统计特性,我们的方法来寻找
X
F
X_F
XF。接下来,使用完整的形状先验字典
(
Φ
)
(Φ)
(Φ),可以使用稀疏解的少数非零系数来近似化形状轮廓:
Y
0
=
Φ
X
F
Y_0=ΦX_F
Y0=ΦXF
为了迫使近似过程朝向所需的形状,迭代地执行两个后续步骤:基于轮廓点的稀疏逼近,然后是 F p − b a s e d F_p-based Fp−based的变形过程。在基于轮廓点的近似过程中,由等式所显示的早期程序(7)和等式(8)重复使用所有的单元格轮廓点(即,360个点)。然后,进行 F p − b a s e d F_p-based Fp−based的变形过程,以限制实际单元形状的稀疏形状,这可以部分地用特征点来表示。
具体来说,利用 F p F_p Fp的坐标位置和输出形状Yo的对应点来计算相似度映射变换Ts,使它们之间的最小二乘误差最小。然后将得到的变换t应用于输出的形状点,将其转移到特征点的正确空间,得到变换后的形状 Y o T Y_{oT} YoT。让这用 T s Y o T_sY_o TsYo表示,其中 T s T_s Ts由 ( h x , h y , σ , θ ) (h_x,h_y,σ,θ) (hx,hy,σ,θ)变换组成; h x h_x hx和 h y h_y hy表示 x x x和 y y y轴上的平移, σ σ σ表示比例, θ θ θ表示旋转角度。
在实际应用中,变换后的形状 Y o T Y_{oT} YoT 倾向于以椭圆的形状改变一些特征点的坐标。为了保持独特的形状信息,调整宫颈细胞的形状变化,将特征点 F p F_p Fp 分配给 Y o T Y_{oT} YoT 中相应的点,然后通过移动平均滤波器对新的输出形状坐标进行平滑,以识别形状的连通性和规律性。这种近似过程(即基于轮廓点的稀疏逼近,然后是 F p − b a s e d F_p-based Fp−based的变形)重复K次,以获得更精确的分割。
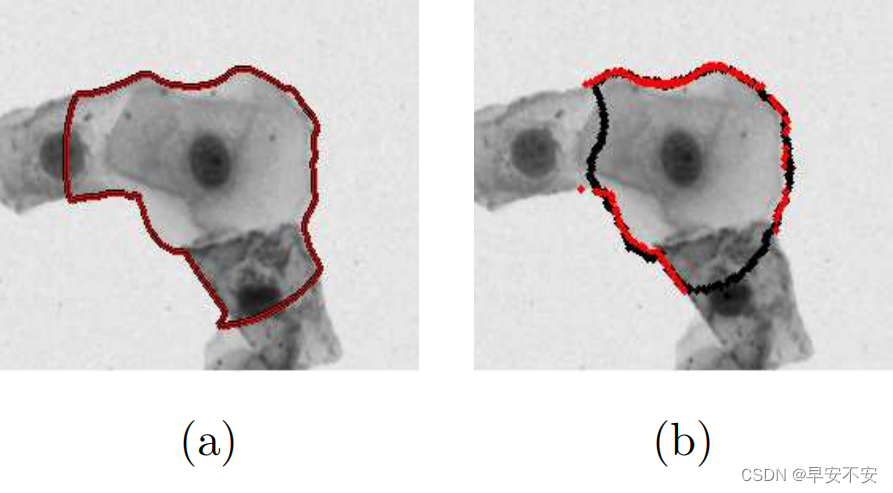
图1显示,我们引导的 F p − b a s e d F_p-based Fp−based形状近似提供了一个很好的分割,每个细胞的近似轮廓非常接近目标轮廓。然而,文章期望一些背景或邻近细胞的像素被包含在估计的轮廓中。因此,DRLSE被用来解决这个问题,并为焦点细胞的实际边界提供一个更可靠的分割。
3.3.3 基于DRLSE的细化和候选过滤
该步骤旨在细化分割后的细胞掩模,去除与细胞边界相连的多余像素,主要为第一阶段包含在细胞质超像素中的背景像素,被误分类为细胞质像素,然后过滤出小于细胞的细胞质候选像素。为了突出显示接近背景像素的一些光细胞质像素,只有图像中的细胞簇被CLAHE均衡。最后,利用测地线主动轮廓模型对得到的细胞轮廓进行细化,然后去除面积小于大小阈值的假候选细胞质。选择距离正则化水平集进化(DRLSE)模型进行细胞细化,其中距离正则化项定义为一个势函数,这样导出的水平集进化具有独特的前后(FAB)扩散效应,保持水平集函数(LSF)的期望形状。DRLSE迫使曲线在有符号的距离函数附近演化,从而保证了曲线的平滑性,并消除了对昂贵的重新初始化过程的需要。考虑到$ φ: Ω→R
表示一个域
表示一个域
表示一个域Ω$上的一个LSF。要最小化的能量函数定义为:
ε
=
µ
R
(
φ
)
+
λ
(
L
)
(
φ
)
+
α
A
(
φ
)
ε = µR(φ) + λ(L)(φ) + αA(φ)
ε=µR(φ)+λ(L)(φ)+αA(φ)
其中,
µ
,
λ
µ,λ
µ,λ和
α
α
α为常数(即,
µ
=
0.2
,
λ
=
5
,
α
=
1.5
µ= 0.2,λ = 5,α = 1.5
µ=0.2,λ=5,α=1.5)。
R
(
φ
)
R(φ)
R(φ)是一个正则化项,保持有符号的距离属性
∇
φ
=
1
∇φ=1
∇φ=1以保证平滑性,
L
(
φ
)
L(φ)
L(φ)度量零能级的长度,
A
(
φ
)
A(φ)
A(φ)度量
φ
<
0
φ < 0
φ<0的面积。通过求解以下梯度流,可以使能量泛函
ε
(
φ
)
ε(φ)
ε(φ)最小化:
∂
φ
∂
t
=
u
d
i
v
(
d
p
∣
∇
φ
∣
∇
φ
)
+
λ
δ
e
(
φ
)
d
i
v
(
g
∇
φ
∣
∇
φ
∣
)
+
α
g
δ
e
(
φ
)
\frac{∂φ}{∂t}=udiv(d_p|∇φ|∇φ)+ λδ_e (φ)div(g\frac{∇φ}{|∇φ|})+ αgδ_e(φ)
∂t∂φ=udiv(dp∣∇φ∣∇φ)+λδe(φ)div(g∣∇φ∣∇φ)+αgδe(φ)
其中,
δ
(
.
)
δ(.)
δ(.)是狄拉克函数,
g
g
g是边停止函数,定义为:
g
(
∣
∇
I
∣
)
=
1
1
+
∣
∇
G
σ
×
I
∣
2
g(|∇I|) =\frac{1}{1+ |∇G_σ × I|^2}
g(∣∇I∣)=1+∣∇Gσ×I∣21
其中,
G
σ
G_σ
Gσ是标准差为
σ
σ
σ的高斯核,
I
I
I是域
Ω
Ω
Ω上的图像。
结语
宫颈细胞涂片的分割是一个不适定的问题,因为不同的形状和经常显著的重叠。在本文中,我们提出了一种两阶段的分割方法,利用独特的基于超像素的形状和外观特征来解决这个具有挑战性的问题,以及使用具有代表性的特征点的引导稀疏形状变形过程。利用高规律性的超像素化来利用超像素的形状特性,以及区分纹理和边界特征,对获得精确的核分割和精确的细胞质/背景边界有很大的影响。此外,形状初始化过程,并使用特征点来近似细胞形状,提供了一个成功的解决方案,以解决使用巴氏涂片图像由于细胞形状的巨大变化和高度重叠的困难。我们的形状初始化过程是适应性强的,能够处理不同的单元类型(即,基于孤立单元的分类结果的简单过程,两个更复杂的单元结构的候选掩码,以及精心计算的没有可提取边缘的模糊细胞的替代单元掩码)。定性和定量结果表明,我们的方法不仅分割分离和接触细胞,而且分割具有高度重叠的大簇细胞的实用性和可靠性。我们的方法在计算的精度和速度方面改进了现有的技术。在未来的工作中,我们打算将我们的方法应用于多焦图像堆栈。


![[UE5]在多个固定摄像机视角间切换,切换多个摄像机,显示不同摄像机所看内容](https://img-blog.csdnimg.cn/ccc18f7c0faa483d9add9d897f4d0752.png)