本文参考以下博文:
Linux内核4.14版本——drm框架分析(5)——plane分析
特此致谢!
1. 简介
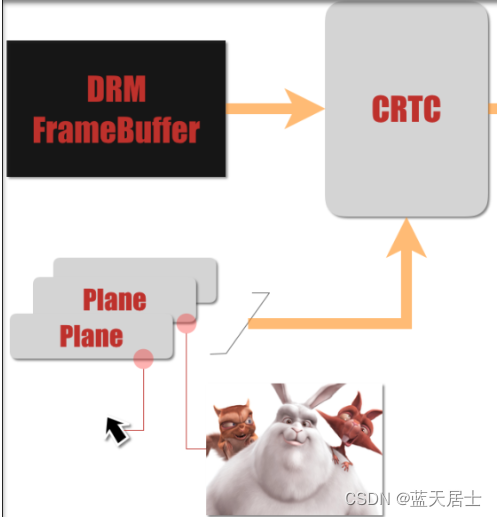
一个plane代表一个image layer(硬件图层),最终的image由一个或者多个plane(s)组成。plane和 Framebuffer 一样是内存地址。plane主要包括以下3种类型:
- DRM_PLANE_TYPE_PRIMARY:主要图层,通常用于仅支持RGB格式的简单图层
- DRM_PLANE_TYPE_OVERLAY:叠加图层,通常用于YUV格式的视频图层
- DRM_PLANE_TYPE_CURSOR:光标图层,一般用于pc系统,用于显示鼠标
2. 核心结构
在Linux内核的DRM中,plane对应的核心结构体为:struct drm_plane。该结构体在include/drm/drm_plane.h中定义,代码如下(Linux内核版本:6.1):
/**
* struct drm_plane - central DRM plane control structure
*
* Planes represent the scanout hardware of a display block. They receive their
* input data from a &drm_framebuffer and feed it to a &drm_crtc. Planes control
* the color conversion, see `Plane Composition Properties`_ for more details,
* and are also involved in the color conversion of input pixels, see `Color
* Management Properties`_ for details on that.
*/
struct drm_plane {
/** @dev: DRM device this plane belongs to */
struct drm_device *dev;
/**
* @head:
*
* List of all planes on @dev, linked from &drm_mode_config.plane_list.
* Invariant over the lifetime of @dev and therefore does not need
* locking.
*/
struct list_head head;
/** @name: human readable name, can be overwritten by the driver */
char *name;
/**
* @mutex:
*
* Protects modeset plane state, together with the &drm_crtc.mutex of
* CRTC this plane is linked to (when active, getting activated or
* getting disabled).
*
* For atomic drivers specifically this protects @state.
*/
struct drm_modeset_lock mutex;
/** @base: base mode object */
struct drm_mode_object base;
/**
* @possible_crtcs: pipes this plane can be bound to constructed from
* drm_crtc_mask()
*/
uint32_t possible_crtcs;
/** @format_types: array of formats supported by this plane */
uint32_t *format_types;
/** @format_count: Size of the array pointed at by @format_types. */
unsigned int format_count;
/**
* @format_default: driver hasn't supplied supported formats for the
* plane. Used by the non-atomic driver compatibility wrapper only.
*/
bool format_default;
/** @modifiers: array of modifiers supported by this plane */
uint64_t *modifiers;
/** @modifier_count: Size of the array pointed at by @modifier_count. */
unsigned int modifier_count;
/**
* @crtc:
*
* Currently bound CRTC, only meaningful for non-atomic drivers. For
* atomic drivers this is forced to be NULL, atomic drivers should
* instead check &drm_plane_state.crtc.
*/
struct drm_crtc *crtc;
/**
* @fb:
*
* Currently bound framebuffer, only meaningful for non-atomic drivers.
* For atomic drivers this is forced to be NULL, atomic drivers should
* instead check &drm_plane_state.fb.
*/
struct drm_framebuffer *fb;
/**
* @old_fb:
*
* Temporary tracking of the old fb while a modeset is ongoing. Only
* used by non-atomic drivers, forced to be NULL for atomic drivers.
*/
struct drm_framebuffer *old_fb;
/** @funcs: plane control functions */
const struct drm_plane_funcs *funcs;
/** @properties: property tracking for this plane */
struct drm_object_properties properties;
/** @type: Type of plane, see &enum drm_plane_type for details. */
enum drm_plane_type type;
/**
* @index: Position inside the mode_config.list, can be used as an array
* index. It is invariant over the lifetime of the plane.
*/
unsigned index;
/** @helper_private: mid-layer private data */
const struct drm_plane_helper_funcs *helper_private;
/**
* @state:
*
* Current atomic state for this plane.
*
* This is protected by @mutex. Note that nonblocking atomic commits
* access the current plane state without taking locks. Either by going
* through the &struct drm_atomic_state pointers, see
* for_each_oldnew_plane_in_state(), for_each_old_plane_in_state() and
* for_each_new_plane_in_state(). Or through careful ordering of atomic
* commit operations as implemented in the atomic helpers, see
* &struct drm_crtc_commit.
*/
struct drm_plane_state *state;
/**
* @alpha_property:
* Optional alpha property for this plane. See
* drm_plane_create_alpha_property().
*/
struct drm_property *alpha_property;
/**
* @zpos_property:
* Optional zpos property for this plane. See
* drm_plane_create_zpos_property().
*/
struct drm_property *zpos_property;
/**
* @rotation_property:
* Optional rotation property for this plane. See
* drm_plane_create_rotation_property().
*/
struct drm_property *rotation_property;
/**
* @blend_mode_property:
* Optional "pixel blend mode" enum property for this plane.
* Blend mode property represents the alpha blending equation selection,
* describing how the pixels from the current plane are composited with
* the background.
*/
struct drm_property *blend_mode_property;
/**
* @color_encoding_property:
*
* Optional "COLOR_ENCODING" enum property for specifying
* color encoding for non RGB formats.
* See drm_plane_create_color_properties().
*/
struct drm_property *color_encoding_property;
/**
* @color_range_property:
*
* Optional "COLOR_RANGE" enum property for specifying
* color range for non RGB formats.
* See drm_plane_create_color_properties().
*/
struct drm_property *color_range_property;
/**
* @scaling_filter_property: property to apply a particular filter while
* scaling.
*/
struct drm_property *scaling_filter_property;
};3. drm_plane结构释义
(0)总述
DRM全解析 —— plane详解(1)
struct drm_plane —— 核心的DRM plane控制结构。
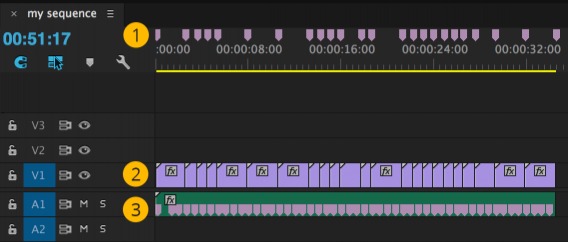
planes表示显示块的扫描输出硬件。它们从drm_framebuffer中接收输入数据,并将其提供给drm_crtc。planes控制颜色转换(有关详细信息,请参见“平面合成属性”),并且还参与输入像素的颜色转换(请参见“颜色管理属性”以了解详细信息)。
作用如下图示:

(1)struct drm_device *dev
/** @dev: DRM device this plane belongs to */
struct drm_device *dev;此plane所属的DRM设备。
(2)struct list_head head
/**
* @head:
*
* List of all planes on @dev, linked from &drm_mode_config.plane_list.
* Invariant over the lifetime of @dev and therefore does not need
* locking.
*/
struct list_head head;@dev上所有平面的列表,链接自&drm_mode_config.plane_List。在@dev的生命周期内保持不变,因此不需要锁定。
(3)char *name
/** @name: human readable name, can be overwritten by the driver */
char *name;人类可读的名称(名字),可以被驱动程序覆盖。
下一篇文章继续深入释义drm_plane结构中其余成员。






![[计算机入门] Windows附件程序介绍(轻松使用)](https://img-blog.csdnimg.cn/8167752197ea464795d584a2028690aa.png)