目录
一、概述
二、编译官方代码
三、移植
四、编译
一、概述
前面已经移植好了TF-A、optee、u-boot,在u-boot能正常跑起来的情况下,现在来移植内核。
二、编译官方代码
进入kernel目录
2.1 解压源码、打补丁
/* 解压源码 */
tar xf linux-6.1.28.tar.xz
/* 进入源码目录 */
cd linux-6.1.28/
/* 打补丁 */
for p in `ls -1 ../*.patch`; do patch -p1 < $p; done2.2 配置Kernel
根据官方手册进行配置即可
/* 配置交叉编译器 */
source /opt/st/stm32mp1/4.2.1-openstlinux-6.1-yocto-mickledore-mp1-v23.06.21/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
/* 输出文件夹 */
export OUTPUT_BUILD_DIR=$PWD/../build
mkdir -p ${OUTPUT_BUILD_DIR}
/* 默认配置文件 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" multi_v7_defconfig fragment*.config2.3 编译内核
编译模块好像要好久,可以不要编译
/* 编译uImage 设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"
/* 编译模块 */
make ARCH=arm modules O="${OUTPUT_BUILD_DIR}"
/* 配置输出文件路径 */
make ARCH=arm INSTALL_MOD_PATH="${OUTPUT_BUILD_DIR}/install_artifact" modules_install O="${OUTPUT_BUILD_DIR}"
mkdir -p ${OUTPUT_BUILD_DIR}/install_artifact/boot/
/* 拷贝输出文件 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候去查看build/install_artifact目录下,有boot和lib两个文件夹,boot里有uImage和设备树,lib里是内核模块
三、移植
3.1 复制文件
/* 进入设备树目录 */
cd arch/arm/boot/dts/
cp stm32mp135f-dk.dts stm32mp135-atk.dts
cp stm32mp13-pinctrl.dtsi stm32mp135-pinctrl-atk.dtsi
/* 回到源码根目录 */
cd ../../../../3.2 修改头文件
打开stm32mp135-atk.dts,把引脚头文件改成我们的
// #include "stm32mp13-pinctrl.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"3.3 修改电源
首先找到&scmi_regu节点,全都干掉
// &scmi_regu {
// scmi_vddcpu: voltd-vddcpu {
// reg = <VOLTD_SCMI_STPMIC1_BUCK1>;
// regulator-name = "vddcpu";
// };
// scmi_vdd: voltd-vdd {
// reg = <VOLTD_SCMI_STPMIC1_BUCK3>;
// regulator-name = "vdd";
// };
// scmi_vddcore: voltd-vddcore {
// reg = <VOLTD_SCMI_STPMIC1_BUCK4>;
// regulator-name = "vddcore";
// };
// scmi_vdd_adc: voltd-vdd-adc {
// reg = <VOLTD_SCMI_STPMIC1_LDO1>;
// regulator-name = "vdd_adc";
// };
// scmi_vdd_usb: voltd-vdd-usb {
// reg = <VOLTD_SCMI_STPMIC1_LDO4>;
// regulator-name = "vdd_usb";
// };
// scmi_vdd_sd: voltd-vdd-sd {
// reg = <VOLTD_SCMI_STPMIC1_LDO5>;
// regulator-name = "vdd_sd";
// };
// scmi_v1v8_periph: voltd-v1v8-periph {
// reg = <VOLTD_SCMI_STPMIC1_LDO6>;
// regulator-name = "v1v8_periph";
// };
// scmi_v3v3_sw: voltd-v3v3-sw {
// reg = <VOLTD_SCMI_STPMIC1_PWR_SW2>;
// regulator-name = "v3v3_sw";
// };
// };去根节点下添加我们对电源的描述,找到v3v3_ao这个节点,把它删了,替换成我们的
// v3v3_ao: v3v3-ao {
// compatible = "regulator-fixed";
// regulator-name = "v3v3_ao";
// regulator-min-microvolt = <3300000>;
// regulator-max-microvolt = <3300000>;
// regulator-always-on;
// };
vddcore: vddcore {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1250000>;
regulator-max-microvolt = <1250000>;
regulator-off-in-suspend;
regulator-always-on;
};
vddcpu: vddcpu {
compatible = "regulator-fixed";
regulator-name = "vddcpu";
regulator-min-microvolt = <1350000>;
regulator-max-microvolt = <1350000>;
regulator-off-in-suspend;
regulator-always-on;
};
v3v3: v3v3 {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
vbus_otg: vbus_otg {
compatible = "regulator-fixed";
regulator-name = "vbus_otg";
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
regulator-off-in-suspend;
regulator-always-on;
};
vdd: vdd {
compatible = "regulator-fixed";
regulator-name = "vdd";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
vdd_usb: vdd_usb {
compatible = "regulator-fixed";
regulator-name = "vdd_usb";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
v1v8_audio: regulator-v1v8_audio {
compatible = "regulator-fixed";
regulator-name = "v1v8_audio";
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
regulator-always-on;
regulator-boot-on;
};
v3v3_hdmi: regulator-v3v3-hdmi {
compatible = "regulator-fixed";
regulator-name = "v3v3_hdmi";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
v1v2_hdmi: regulator-v1v2-hdmi {
compatible = "regulator-fixed";
regulator-name = "v1v2_hdmi";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
regulator-always-on;
regulator-boot-on;
};3.4 添加看门狗
由于笔者前面移植u-boot、optee、TF-A哪里遗忘了一个iwdg2,正点原子使用的是iwdg2,而ST官方使用的是arm_wdt,如果前面用到了iwdg2,那就在这里添加上,如果没有则pass这一部分
&iwdg2 {
timeout-sec = <32>;
status = "okay";
};3.5 修改网络
找到eth1和eth2,修改成正点原子的
ð1 {
status = "okay";
pinctrl-0 = <ð1_rgmii_pins_a>;
pinctrl-1 = <ð1_rgmii_sleep_pins_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0_eth1>;
nvmem-cells = <ðernet_mac1_address>;
nvmem-cell-names = "mac-address";
mdio1 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0_eth1: ethernet-phy@1 {
reg = <1>;
};
};
};
ð2 {
status = "okay";
pinctrl-0 = <ð2_rgmii_pins_a>;
pinctrl-1 = <ð2_rgmii_sleep_pins_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0_eth2>;
phy-supply = <&v3v3>;
nvmem-cells = <ðernet_mac2_address>;
nvmem-cell-names = "mac-address";
mdio1 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0_eth2: ethernet-phy@2 {
reg = <2>;
};
};
};3.6 修改sdmmc
找到sdmmc1和sdmmc2,修改成我们的
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
st,neg-edge;
no-1-8-v;
bus-width = <4>;
vmmc-supply = <&v3v3>;
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
};
/* EMMC */
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;
non-removable;
st,neg-edge;
mmc-ddr-3_3v;
no-1-8-v;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
};3.7 删掉其它
如果根文件系统是在emmc里,只需要修改一个sdmmc2能用就行;如果根文件系统需要通过nfs挂载,那就需要修改eth1和eth2节点。而对于其他部分,USB、OTG、LCD等外设,都是可以删除的,这些都是正点原子会讲会移植的东西,所以笔者在这里把不需要的外设全部移除
1. usbh_ehci、usbotg_hs、usbphyc、usbphyc_port0、usbphyc_port1
2. usart1、 usart2、uart8
3. timers3、timers4、timers8、timers14
4. spi5
5. rtc
6. ltdc
7. i2c1、i2c5
8. dcmipp
9. adc1
10. 根节点下:gpio-keys、leds、panel_backlight、panel_rgb、wake_up、wifi_pwrseq
删除之后可以得到一个相对精简的设备树:
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/*
* Copyright (C) STMicroelectronics 2021 - All Rights Reserved
* Author: Alexandre Torgue <alexandre.torgue@foss.st.com> for STMicroelectronics.
*/
/dts-v1/;
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/input/input.h>
#include <dt-bindings/leds/common.h>
#include <dt-bindings/regulator/st,stm32mp13-regulator.h>
#include <dt-bindings/rtc/rtc-stm32.h>
#include "stm32mp135.dtsi"
#include "stm32mp13xf.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"
/ {
model = "ATK STM32MP135-ATK Discovery Board";
compatible = "st,stm32mp135-ATK", "st,stm32mp135";
aliases {
ethernet0 = ð1;
ethernet1 = ð2;
serial0 = &uart4;
};
chosen {
stdout-path = "serial0:115200n8";
#address-cells = <1>;
#size-cells = <1>;
ranges;
framebuffer {
compatible = "simple-framebuffer";
clocks = <&rcc LTDC_PX>;
status = "disabled";
};
};
clocks {
clk_ext_camera: clk-ext-camera {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <24000000>;
};
clk_mco1: clk-mco1 {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <24000000>;
};
};
memory@c0000000 {
device_type = "memory";
reg = <0xc0000000 0x20000000>;
};
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
optee@dd000000 {
reg = <0xdd000000 0x3000000>;
no-map;
};
};
vddcore: vddcore {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1250000>;
regulator-max-microvolt = <1250000>;
regulator-off-in-suspend;
regulator-always-on;
};
vddcpu: vddcpu {
compatible = "regulator-fixed";
regulator-name = "vddcpu";
regulator-min-microvolt = <1350000>;
regulator-max-microvolt = <1350000>;
regulator-off-in-suspend;
regulator-always-on;
};
v3v3: v3v3 {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
vbus_otg: vbus_otg {
compatible = "regulator-fixed";
regulator-name = "vbus_otg";
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
regulator-off-in-suspend;
regulator-always-on;
};
vdd: vdd {
compatible = "regulator-fixed";
regulator-name = "vdd";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
vdd_usb: vdd_usb {
compatible = "regulator-fixed";
regulator-name = "vdd_usb";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-off-in-suspend;
regulator-always-on;
};
v1v8_audio: regulator-v1v8_audio {
compatible = "regulator-fixed";
regulator-name = "v1v8_audio";
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
regulator-always-on;
regulator-boot-on;
};
v3v3_hdmi: regulator-v3v3-hdmi {
compatible = "regulator-fixed";
regulator-name = "v3v3_hdmi";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
v1v2_hdmi: regulator-v1v2-hdmi {
compatible = "regulator-fixed";
regulator-name = "v1v2_hdmi";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
regulator-always-on;
regulator-boot-on;
};
};
&iwdg2 {
timeout-sec = <32>;
status = "okay";
};
&arm_wdt {
timeout-sec = <32>;
status = "okay";
};
&crc1 {
status = "okay";
};
&cryp {
status = "okay";
};
&dts {
status = "okay";
};
ð1 {
status = "okay";
pinctrl-0 = <ð1_rgmii_pins_a>;
pinctrl-1 = <ð1_rgmii_sleep_pins_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0_eth1>;
nvmem-cells = <ðernet_mac1_address>;
nvmem-cell-names = "mac-address";
mdio1 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0_eth1: ethernet-phy@1 {
reg = <1>;
};
};
};
ð2 {
status = "okay";
pinctrl-0 = <ð2_rgmii_pins_a>;
pinctrl-1 = <ð2_rgmii_sleep_pins_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0_eth2>;
phy-supply = <&v3v3>;
nvmem-cells = <ðernet_mac2_address>;
nvmem-cell-names = "mac-address";
mdio1 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0_eth2: ethernet-phy@2 {
reg = <2>;
};
};
};
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;
st,neg-edge;
no-1-8-v;
bus-width = <4>;
vmmc-supply = <&v3v3>;
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
};
/* EMMC */
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;
non-removable;
st,neg-edge;
mmc-ddr-3_3v;
no-1-8-v;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
};
&uart4 {
pinctrl-names = "default", "sleep", "idle";
pinctrl-0 = <&uart4_pins_a>;
pinctrl-1 = <&uart4_sleep_pins_a>;
pinctrl-2 = <&uart4_idle_pins_a>;
/delete-property/dmas;
/delete-property/dma-names;
status = "okay";
};
3.8 修改引脚
由于前面删了很多无关外设,引脚我们只需要复制原子的部分即可:eth1、eth2、emmc1、emmc2
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/*
* Copyright (C) STMicroelectronics 2021 - All Rights Reserved
* Author: Alexandre Torgue <alexandre.torgue@foss.st.com>
*/
#include <dt-bindings/pinctrl/stm32-pinfunc.h>
&pinctrl {
eth1_rgmii_pins_a: eth1-rgmii-1 {
pins1 {
pinmux = <STM32_PINMUX('F', 12, AF11)>, /* ETH1_RGMII_CLK125 */
<STM32_PINMUX('C', 1, AF11)>, /* ETH1_RGMII_GTX_CLK */
<STM32_PINMUX('G', 13, AF11)>, /* ETH1_RGMII_TXD0 */
<STM32_PINMUX('G', 14, AF11)>, /* ETH1_RGMII_TXD1 */
<STM32_PINMUX('C', 2, AF11)>, /* ETH1_RGMII_TXD2 */
<STM32_PINMUX('E', 5, AF10)>, /* ETH1_RGMII_TXD3 */
<STM32_PINMUX('B', 11, AF11)>, /* ETH1_RGMII_TX_CTL */
<STM32_PINMUX('A', 2, AF11)>, /* ETH1_MDIO */
<STM32_PINMUX('G', 2, AF11)>; /* ETH1_MDC */
bias-disable;
drive-push-pull;
slew-rate = <2>;
};
pins2 {
pinmux = <STM32_PINMUX('C', 4, AF11)>, /* ETH1_RGMII_RXD0 */
<STM32_PINMUX('C', 5, AF11)>, /* ETH1_RGMII_RXD1 */
<STM32_PINMUX('B', 0, AF11)>, /* ETH1_RGMII_RXD2 */
<STM32_PINMUX('B', 1, AF11)>, /* ETH1_RGMII_RXD3 */
<STM32_PINMUX('A', 1, AF11)>, /* ETH1_RGMII_RX_CLK */
<STM32_PINMUX('A', 7, AF11)>; /* ETH1_RGMII_RX_CTL */
bias-disable;
};
};
eth1_rgmii_sleep_pins_a: eth1-rgmii-sleep-1 {
pins1 {
pinmux = <STM32_PINMUX('F', 12, ANALOG)>, /* ETH1_RGMII_CLK125 */
<STM32_PINMUX('C', 1, ANALOG)>, /* ETH1_RGMII_GTX_CLK */
<STM32_PINMUX('G', 13, ANALOG)>, /* ETH1_RGMII_TXD0 */
<STM32_PINMUX('G', 14, ANALOG)>, /* ETH1_RGMII_TXD1 */
<STM32_PINMUX('C', 2, ANALOG)>, /* ETH1_RGMII_TXD2 */
<STM32_PINMUX('E', 5, ANALOG)>, /* ETH1_RGMII_TXD3 */
<STM32_PINMUX('B', 11, ANALOG)>, /* ETH1_RGMII_TX_CTL */
<STM32_PINMUX('A', 2, ANALOG)>, /* ETH1_MDIO */
<STM32_PINMUX('G', 2, ANALOG)>, /* ETH1_MDC */
<STM32_PINMUX('C', 4, ANALOG)>, /* ETH1_RGMII_RXD0 */
<STM32_PINMUX('C', 5, ANALOG)>, /* ETH1_RGMII_RXD1 */
<STM32_PINMUX('B', 0, ANALOG)>, /* ETH1_RGMII_RXD2 */
<STM32_PINMUX('B', 1, ANALOG)>, /* ETH1_RGMII_RXD3 */
<STM32_PINMUX('A', 1, ANALOG)>, /* ETH1_RGMII_RX_CLK */
<STM32_PINMUX('A', 7, ANALOG)>; /* ETH1_RGMII_RX_CTL */
};
};
eth2_rgmii_pins_a: eth2-rgmii-2 {
pins1 {
pinmux = <STM32_PINMUX('H', 2, AF13)>, /* ETH2_RGMII_CLK125 */
<STM32_PINMUX('F', 7, AF11)>, /* ETH2_RGMII_TXD0 */
<STM32_PINMUX('G', 11, AF10)>, /* ETH2_RGMII_TXD1 */
<STM32_PINMUX('G', 1, AF10)>, /* ETH2_RGMII_TXD2 */
<STM32_PINMUX('E', 6, AF11)>, /* ETH2_RGMII_TXD3 */
<STM32_PINMUX('G', 3, AF10)>, /* ETH2_RGMII_GTX_CLK */
<STM32_PINMUX('F', 6, AF11)>, /* ETH2_RGMII_TX_CTL */
<STM32_PINMUX('B', 2, AF11)>, /* ETH2_MDIO */
<STM32_PINMUX('G', 5, AF10)>; /* ETH2_MDC */
bias-disable;
drive-push-pull;
slew-rate = <2>;
};
pins2 {
pinmux = <STM32_PINMUX('F', 4, AF11)>, /* ETH2_RGMII_RXD0 */
<STM32_PINMUX('E', 2, AF10)>, /* ETH2_RGMII_RXD1 */
<STM32_PINMUX('H', 6, AF12)>, /* ETH2_RGMII_RXD2 */
<STM32_PINMUX('A', 8, AF11)>, /* ETH2_RGMII_RXD3 */
<STM32_PINMUX('H', 11, AF11)>, /* ETH2_RGMII_RX_CLK */
<STM32_PINMUX('G', 12, AF12)>; /* ETH2_RGMII_RX_CTL */
bias-disable;
};
};
eth2_rgmii_sleep_pins_a: eth2-rgmii-sleep-2 {
pins1 {
pinmux = <STM32_PINMUX('H', 2, ANALOG)>, /* ETH2_RGMII_CLK125 */
<STM32_PINMUX('F', 7, ANALOG)>, /* ETH2_RGMII_TXD0 */
<STM32_PINMUX('G', 11, ANALOG)>, /* ETH2_RGMII_TXD1 */
<STM32_PINMUX('G', 1, ANALOG)>, /* ETH2_RGMII_TXD2 */
<STM32_PINMUX('E', 6, ANALOG)>, /* ETH2_RGMII_TXD3 */
<STM32_PINMUX('G', 3, ANALOG)>, /* ETH2_RGMII_GTX_CLK */
<STM32_PINMUX('F', 6, ANALOG)>, /* ETH2_RGMII_TX_CTL */
<STM32_PINMUX('B', 2, ANALOG)>, /* ETH2_MDIO */
<STM32_PINMUX('G', 5, ANALOG)>, /* ETH2_MDC */
<STM32_PINMUX('F', 4, ANALOG)>, /* ETH2_RGMII_RXD0 */
<STM32_PINMUX('E', 2, ANALOG)>, /* ETH2_RGMII_RXD1 */
<STM32_PINMUX('H', 6, ANALOG)>, /* ETH2_RGMII_RXD2 */
<STM32_PINMUX('A', 8, ANALOG)>, /* ETH2_RGMII_RXD3 */
<STM32_PINMUX('H', 11, ANALOG)>, /* ETH2_RGMII_RX_CLK */
<STM32_PINMUX('G', 12, ANALOG)>; /* ETH2_RGMII_RX_CTL */
};
};
sdmmc1_b4_pins_a: sdmmc1-b4-0 {
pins {
pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */
<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */
<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */
<STM32_PINMUX('C', 11, AF12)>, /* SDMMC1_D3 */
<STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */
slew-rate = <1>;
drive-push-pull;
bias-disable;
};
};
sdmmc1_b4_od_pins_a: sdmmc1-b4-od-0 {
pins1 {
pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */
<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */
<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */
<STM32_PINMUX('C', 11, AF12)>; /* SDMMC1_D3 */
slew-rate = <1>;
drive-push-pull;
bias-disable;
};
pins2 {
pinmux = <STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */
slew-rate = <1>;
drive-open-drain;
bias-disable;
};
};
sdmmc1_b4_sleep_pins_a: sdmmc1-b4-sleep-0 {
pins {
pinmux = <STM32_PINMUX('C', 8, ANALOG)>, /* SDMMC1_D0 */
<STM32_PINMUX('C', 9, ANALOG)>, /* SDMMC1_D1 */
<STM32_PINMUX('C', 10, ANALOG)>, /* SDMMC1_D2 */
<STM32_PINMUX('C', 11, ANALOG)>, /* SDMMC1_D3 */
<STM32_PINMUX('C', 12, ANALOG)>, /* SDMMC1_CK */
<STM32_PINMUX('D', 2, ANALOG)>; /* SDMMC1_CMD */
};
};
sdmmc1_clk_pins_a: sdmmc1-clk-0 {
pins {
pinmux = <STM32_PINMUX('C', 12, AF12)>; /* SDMMC1_CK */
slew-rate = <1>;
drive-push-pull;
bias-disable;
};
};
sdmmc2_b4_pins_a: sdmmc2-b4-0 {
pins {
pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */
<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */
<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */
<STM32_PINMUX('B', 4, AF10)>, /* SDMMC2_D3 */
<STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */
slew-rate = <1>;
drive-push-pull;
bias-pull-up;
};
};
sdmmc2_b4_b7_pins_a: sdmmc2-b4-b7-0 {
pins {
pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */
<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */
<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */
<STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */
slew-rate = <1>;
drive-push-pull;
bias-pull-up;
};
};
sdmmc2_b4_od_pins_a: sdmmc2-b4-od-0 {
pins1 {
pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */
<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */
<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */
<STM32_PINMUX('B', 4, AF10)>; /* SDMMC2_D3 */
slew-rate = <1>;
drive-push-pull;
bias-pull-up;
};
pins2 {
pinmux = <STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */
slew-rate = <1>;
drive-open-drain;
bias-pull-up;
};
};
sdmmc2_b4_b7_od_pins_a: sdmmc2-b4-b7-od-0 {
pins {
pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */
<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */
<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */
<STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */
slew-rate = <1>;
drive-push-pull;
bias-pull-up;
};
};
sdmmc2_b4_sleep_pins_a: sdmmc2-b4-sleep-0 {
pins {
pinmux = <STM32_PINMUX('B', 14, ANALOG)>, /* SDMMC2_D0 */
<STM32_PINMUX('B', 15, ANALOG)>, /* SDMMC2_D1 */
<STM32_PINMUX('B', 3, ANALOG)>, /* SDMMC2_D2 */
<STM32_PINMUX('B', 4, ANALOG)>, /* SDMMC2_D3 */
<STM32_PINMUX('E', 3, ANALOG)>, /* SDMMC2_CK */
<STM32_PINMUX('G', 6, ANALOG)>; /* SDMMC2_CMD */
};
};
sdmmc2_b4_b7_sleep_pins_a: sdmmc2-b4-b7-sleep-0 {
pins {
pinmux = <STM32_PINMUX('F', 0, ANALOG)>, /* SDMMC2_D4 */
<STM32_PINMUX('B', 9, ANALOG)>, /* SDMMC2_D5 */
<STM32_PINMUX('C', 6, ANALOG)>, /* SDMMC2_D6 */
<STM32_PINMUX('C', 7, ANALOG)>; /* SDMMC2_D7 */
};
};
sdmmc2_clk_pins_a: sdmmc2-clk-0 {
pins {
pinmux = <STM32_PINMUX('E', 3, AF10)>; /* SDMMC2_CK */
slew-rate = <1>;
drive-push-pull;
bias-pull-up;
};
};
uart4_pins_a: uart4-0 {
pins1 {
pinmux = <STM32_PINMUX('D', 6, AF8)>; /* UART4_TX */
bias-disable;
drive-push-pull;
slew-rate = <0>;
};
pins2 {
pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */
bias-pull-up;
};
};
uart4_idle_pins_a: uart4-idle-0 {
pins1 {
pinmux = <STM32_PINMUX('D', 6, ANALOG)>; /* UART4_TX */
};
pins2 {
pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */
bias-pull-up;
};
};
uart4_sleep_pins_a: uart4-sleep-0 {
pins {
pinmux = <STM32_PINMUX('D', 6, ANALOG)>, /* UART4_TX */
<STM32_PINMUX('D', 8, ANALOG)>; /* UART4_RX */
};
};
};
3.9 修改Makefile
在源码目录下arch/arm/boot/dts/这个目录里有一个Makefile,找到里面的stm32
dtb-$(CONFIG_ARCH_STM32) += \
stm32f429-disco.dtb \
stm32f469-disco.dtb \
stm32f746-disco.dtb \
stm32f769-disco.dtb \
stm32429i-eval.dtb \
stm32746g-eval.dtb \
stm32h743i-eval.dtb \
stm32h743i-disco.dtb \
stm32h750i-art-pi.dtb \
stm32mp135f-dk.dtb \
stm32mp135f-dk-a7-examples.dtb \
stm32mp151a-prtt1a.dtb \
stm32mp151a-prtt1c.dtb \
stm32mp151a-prtt1s.dtb \
stm32mp153c-dhcom-drc02.dtb \
stm32mp153c-dhcor-drc-compact.dtb \
stm32mp157a-avenger96.dtb \
stm32mp157a-dhcor-avenger96.dtb \
stm32mp157a-dk1.dtb \
stm32mp157a-dk1-a7-examples.dtb \
stm32mp157a-dk1-m4-examples.dtb \
stm32mp157a-ed1.dtb \
stm32mp157a-ev1.dtb \
stm32mp157a-ev1-a7-examples.dtb \
stm32mp157a-ev1-m4-examples.dtb \
stm32mp157a-iot-box.dtb \
stm32mp157a-microgea-stm32mp1-microdev2.0.dtb \
stm32mp157a-microgea-stm32mp1-microdev2.0-of7.dtb \
stm32mp157a-icore-stm32mp1-ctouch2.dtb \
stm32mp157a-icore-stm32mp1-ctouch2-of10.dtb \
stm32mp157a-icore-stm32mp1-edimm2.2.dtb \
stm32mp157a-stinger96.dtb \
stm32mp157c-dhcom-pdk2.dtb \
stm32mp157c-dhcom-picoitx.dtb \
stm32mp157c-dk2.dtb \
stm32mp157c-dk2-a7-examples.dtb \
stm32mp157c-dk2-m4-examples.dtb \
stm32mp157c-ed1.dtb \
stm32mp157c-emsbc-argon.dtb \
stm32mp157c-ev1.dtb \
stm32mp157c-ev1-a7-examples.dtb \
stm32mp157c-ev1-m4-examples.dtb \
stm32mp157c-lxa-mc1.dtb \
stm32mp157c-odyssey.dtb \
stm32mp157d-dk1.dtb \
stm32mp157d-dk1-a7-examples.dtb \
stm32mp157d-dk1-m4-examples.dtb \
stm32mp157d-ed1.dtb \
stm32mp157d-ev1.dtb \
stm32mp157d-ev1-a7-examples.dtb \
stm32mp157d-ev1-m4-examples.dtb \
stm32mp157f-dk2.dtb \
stm32mp157f-dk2-a7-examples.dtb \
stm32mp157f-dk2-m4-examples.dtb \
stm32mp157f-ed1.dtb \
stm32mp157f-ev1.dtb \
stm32mp157f-ev1-a7-examples.dtb \
stm32mp157f-ev1-m4-examples.dtb \添加上我们的设备树,或者全删了只留我们自己的设备树
dtb-$(CONFIG_ARCH_STM32) += \
stm32mp135-atk.dtb至此,内核所需要修改的文件已全部完成。
四、编译
4.1 配置内核
在这里笔者遇到一个问题,内核编译后直接跑,会提示无法修改CPU主频,然后上网找到了需要配置内核:
/* 打开Linux图形化配置界面 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" menuconfig->CPU Power Management
->CPU Frequency scaling
->[*] CPU frequency transition statistics
-> Default CPUFreq governor(userspace)
把CPUFreq改为userspace这个选项
cp ../build/.config arch/arm/configs/stm32mp135_atk_defconfig把配置文件保存为我们的默认配置文件,以便下次使用
4.2 编译
/* 编译内核、设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"
/* 复制文件到输出文件夹 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候查看build/install_artifact/boot文件夹,会发现有刚刚编译好的uImage和stm32mp135-atk.dtb,剩下的烧写就就可以根据原子的详细教程就行了
4.3 nfs挂载根文件系统
这里可能有个小小的坑,在设备树中,ethernet0是eth1,ethernet1是eth2,所以用nfs挂根文件系统的时候,应该选eth0或eth1。反正大家可以多尝试几个。
笔者用tftp和nfs启动内核:
setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/nfs nfsroot=192.168.1.2:/home/zhangrl/Linux/nfs/rootfs,proto=tcp rw ip=192.168.1.3:192.168.1.2:192.168.1.1:255.255.255.0::eth1:off'4.4 emmc挂根文件系统
烧写到emmc中的时候,先去uboot里查看自己的内核在emmc的哪一个分区,rootfs在哪一个分区:
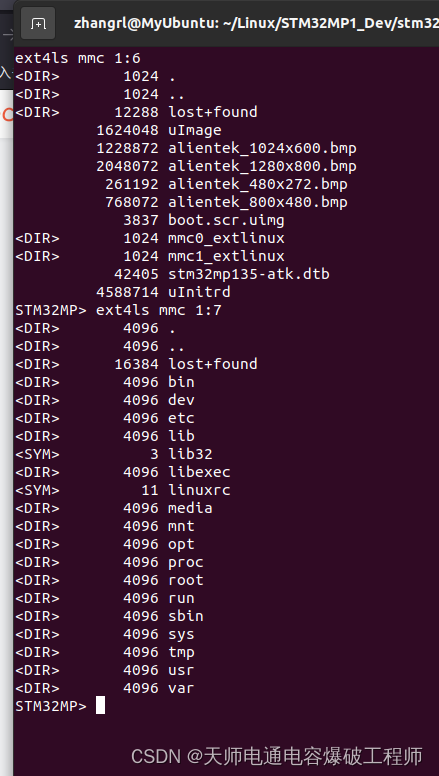
使用ext4ls命令,对一个一个分区进行扫描,直到看到自己的分区(笔者只会这个笨方法)
ext4ls:
第一个参数mmc,设备,选择mmc设备
第二个参数1,选择mmc1,就是我们的emmc
第三个参数,选择分区,一个一个试
知道自己的分区之后,就可以该bootcmd和bootargs:
setenv bootcmd 'ext4load mmc 1:6 c2000000 uImage;ext4load mmc 1:6 c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/mmcblk1p7 rootwait rw'至此,STM32MP135的全套移植教程完成,补上了正点原子的空白,剩下的根文件系统直接跟正点原子的教程即可,使用buildroot和busybox都可以。笔者今年刚学Linux,从i.mx6ull学完过来,对Linux的理解可能并不到位
如果文章有错误,希望大家指正