1. SPI通信
1. 什么是SPI通信协议
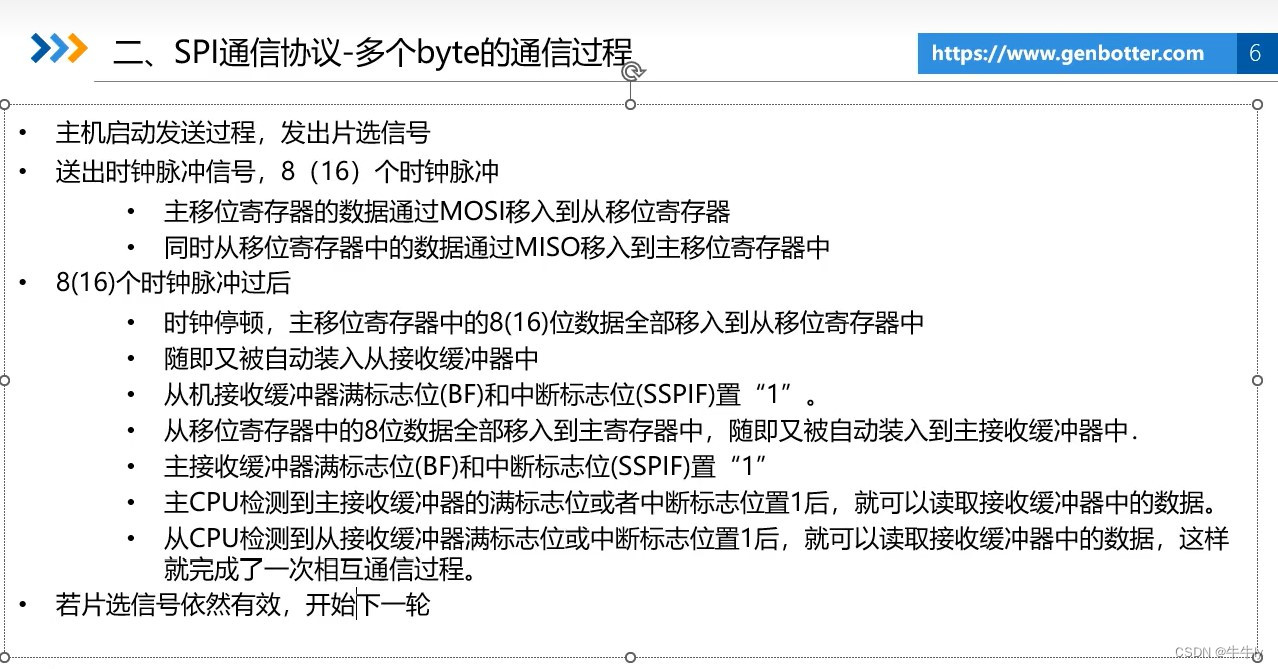
2. SPI的通信过程
在一开始会先把发送缓冲器的数据(8位)。一次性放到移位寄存器里。 移位寄存器会一位一位发送出去。但是要先放到锁存器里。然后从机来读取。从机的过程也一样。当移位寄存器的数据全部发送完。其实是主机与从机交换了数据。这时一次性把移位寄存器的数据放到接收缓冲器中。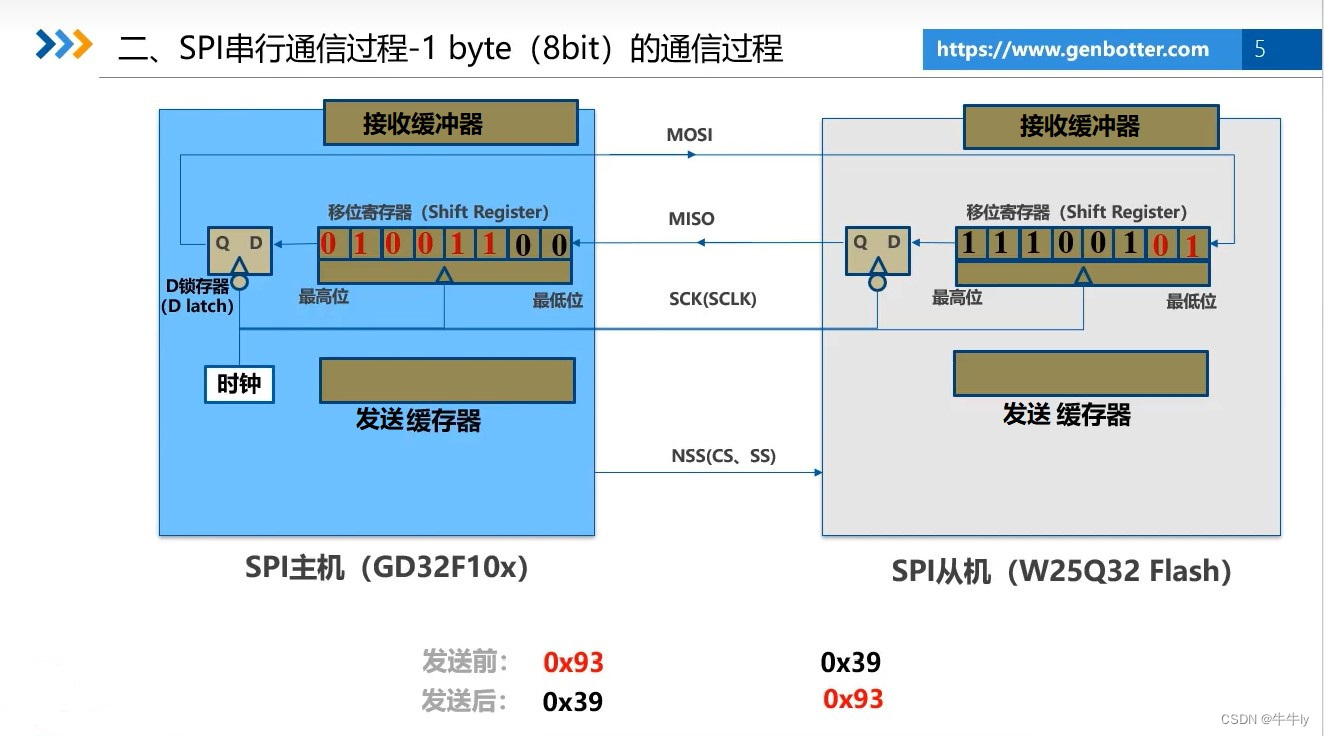
3. SPI的几种模式
CPOL时钟极性决定空闲时的高低电平。设置为1。空闲就是高电平。设置为0。空闲就是低电平。
CPHA时钟相位什么时候进行采样。设置为0。在第一个时钟边沿采集。所以在采集前要准备好数据。设置为1。在第二个时钟边沿采集。
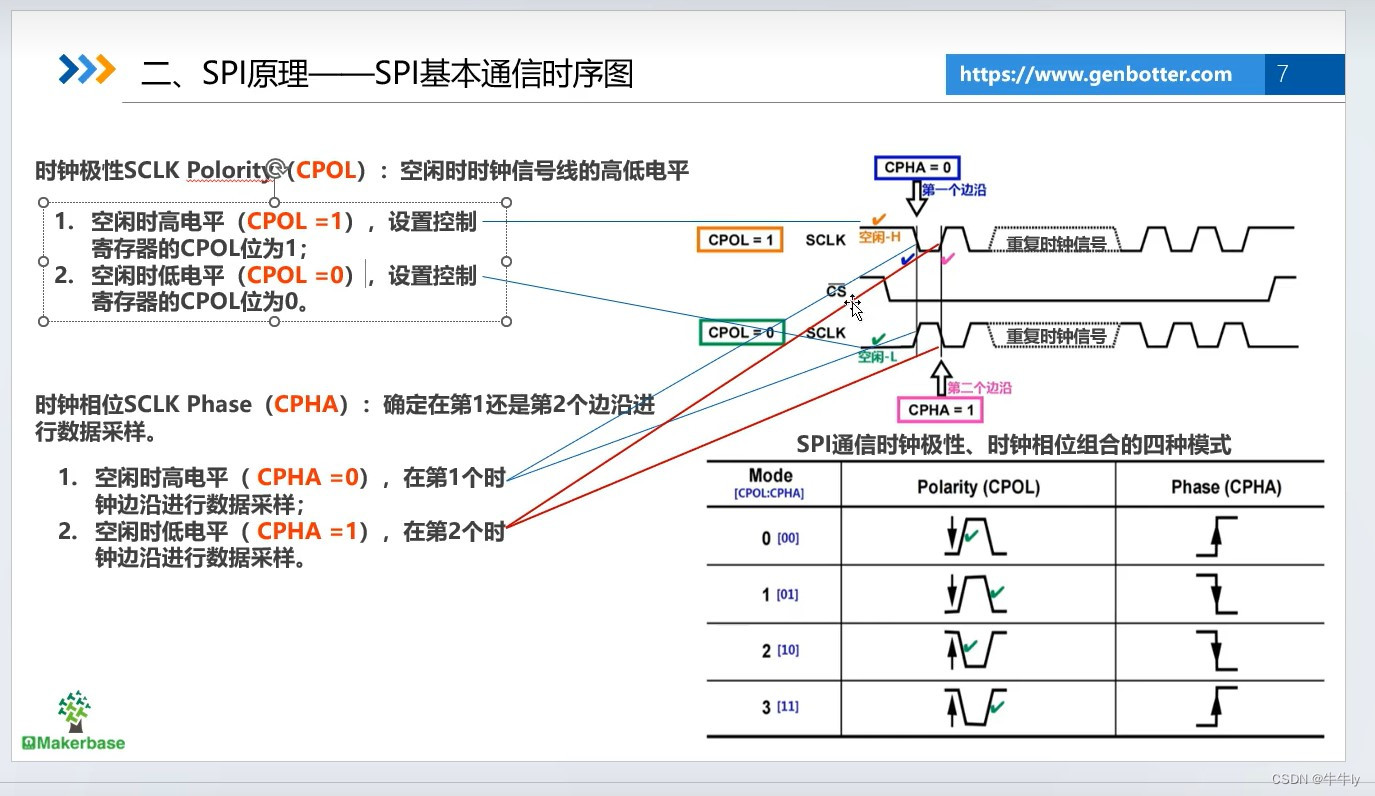
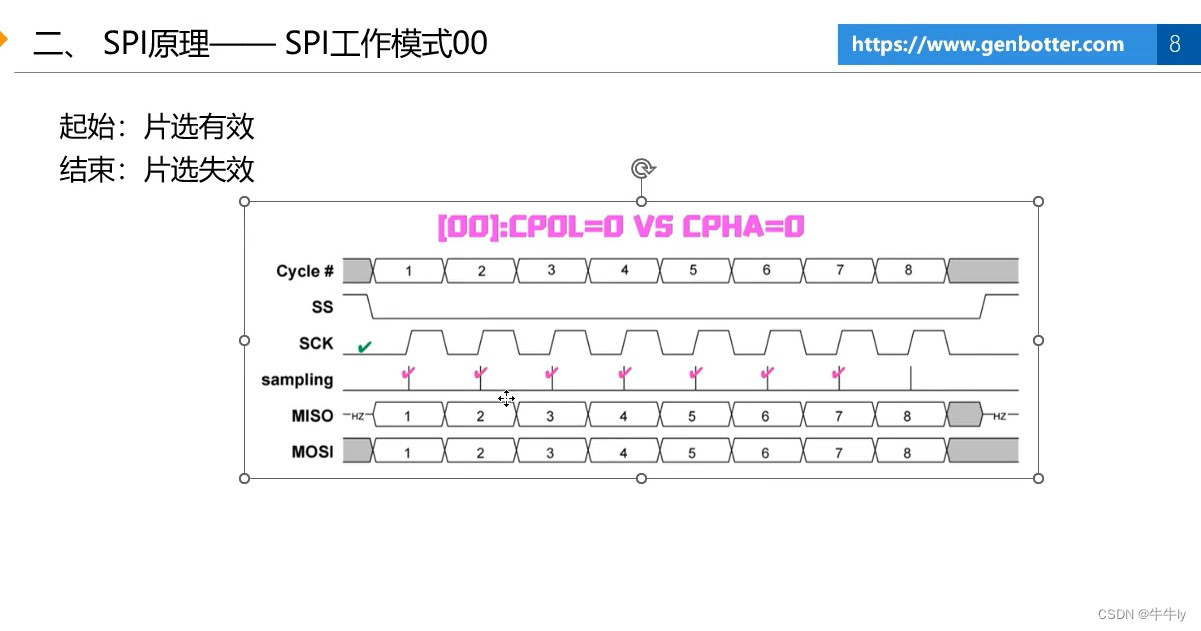
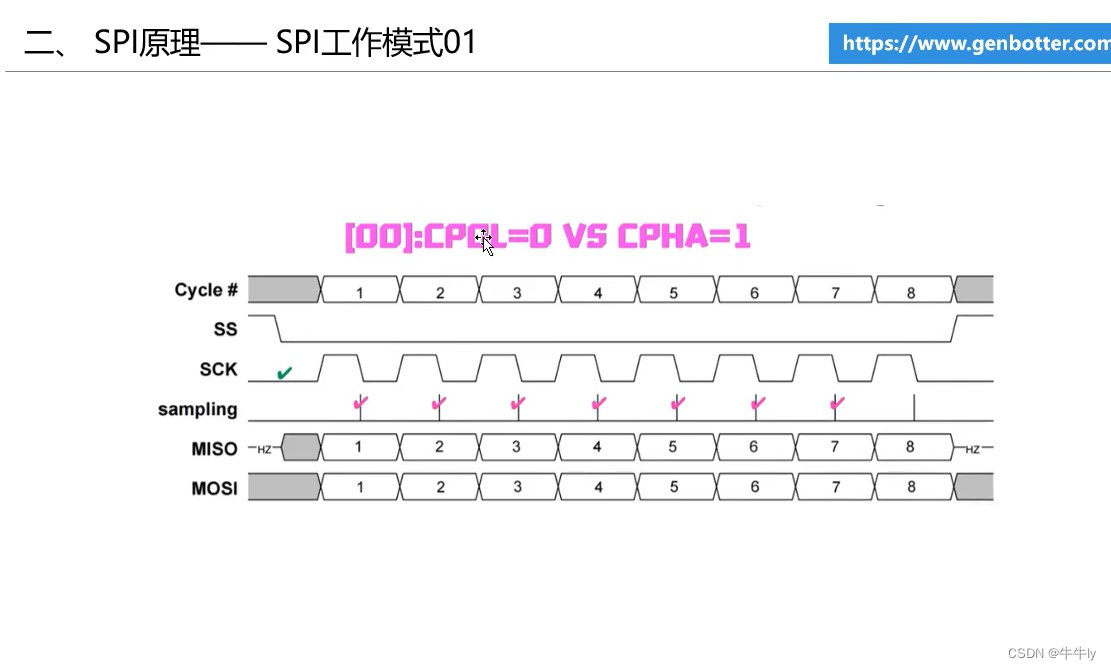
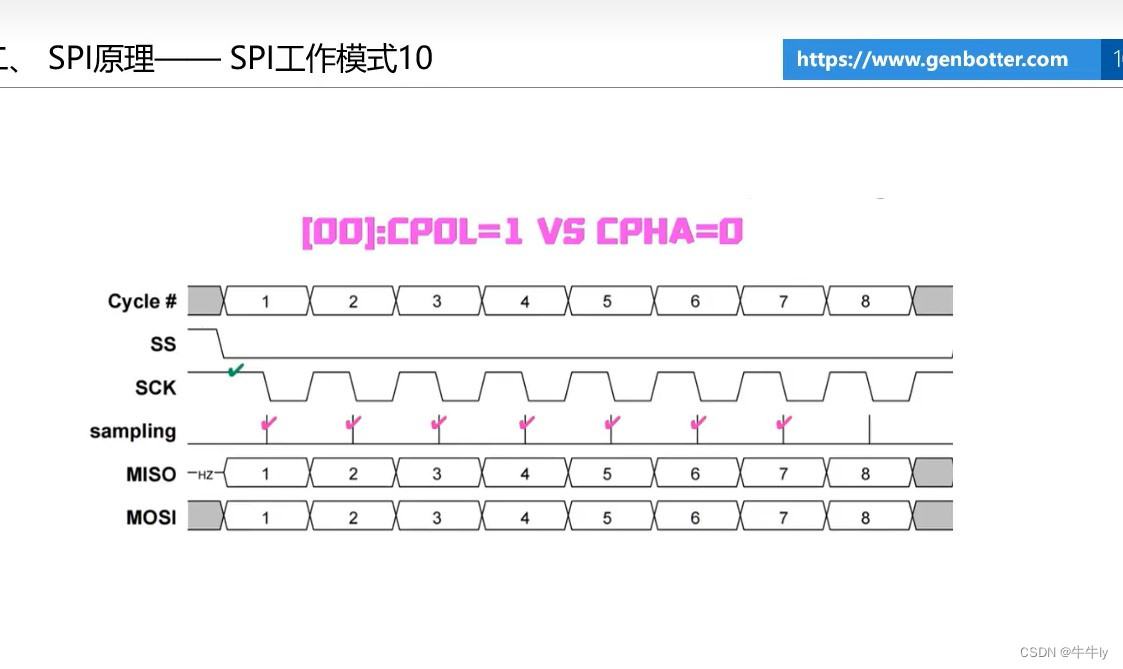
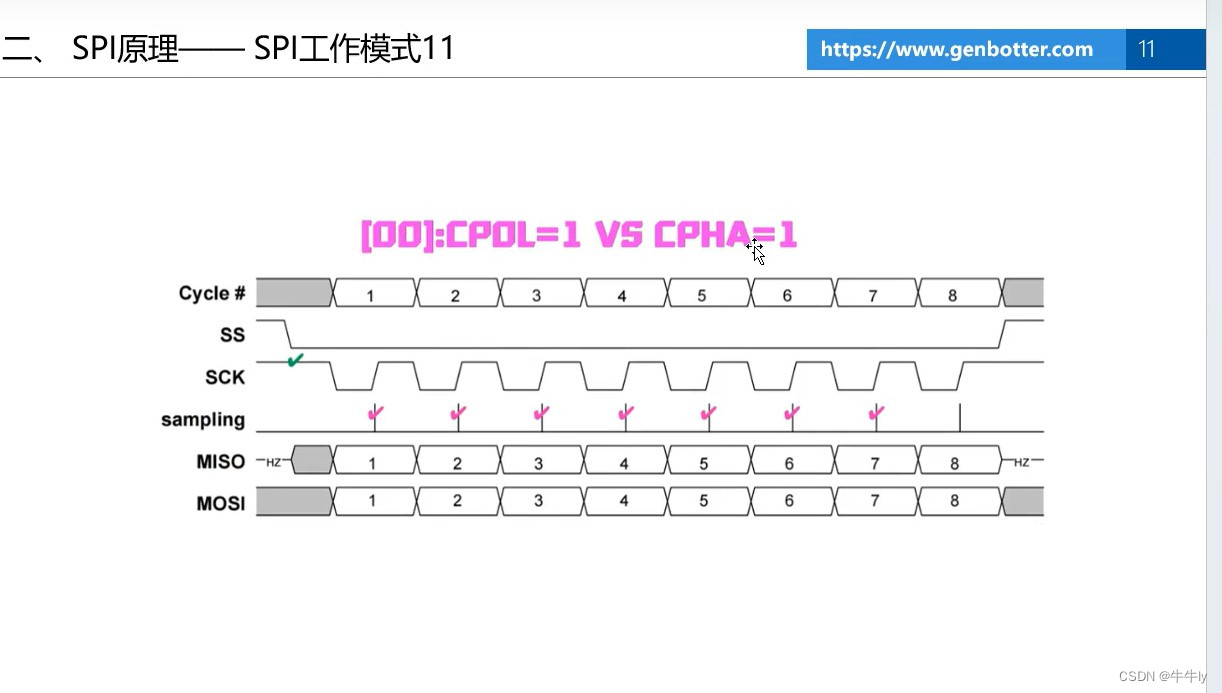
具体采用那种模式。查看从机手册支持哪种SPI模式来进行选择。
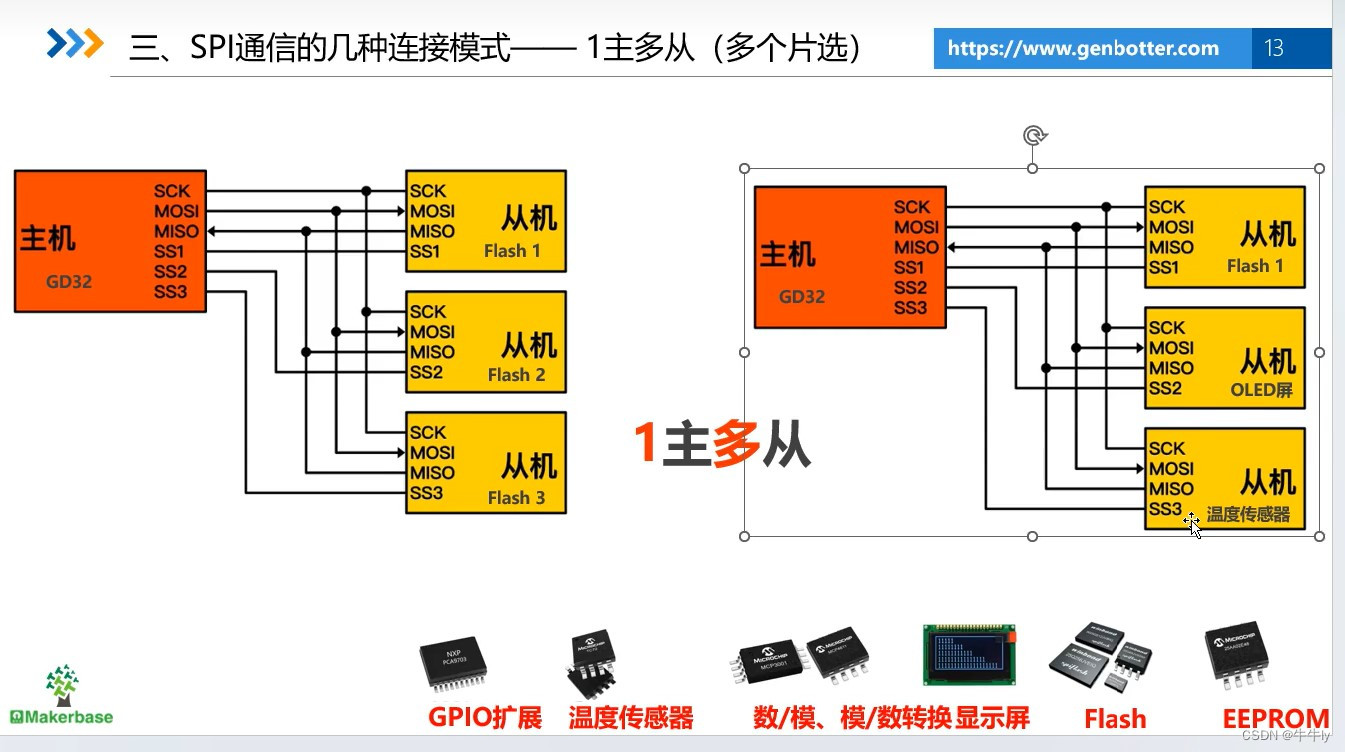
4. SPI的具体连接模式。
一主一从

一主多从 (通过哪个从机的片选使能来选择。如果某个从机选中。其他的从机就不起作用)
SPI不支持多主机的。
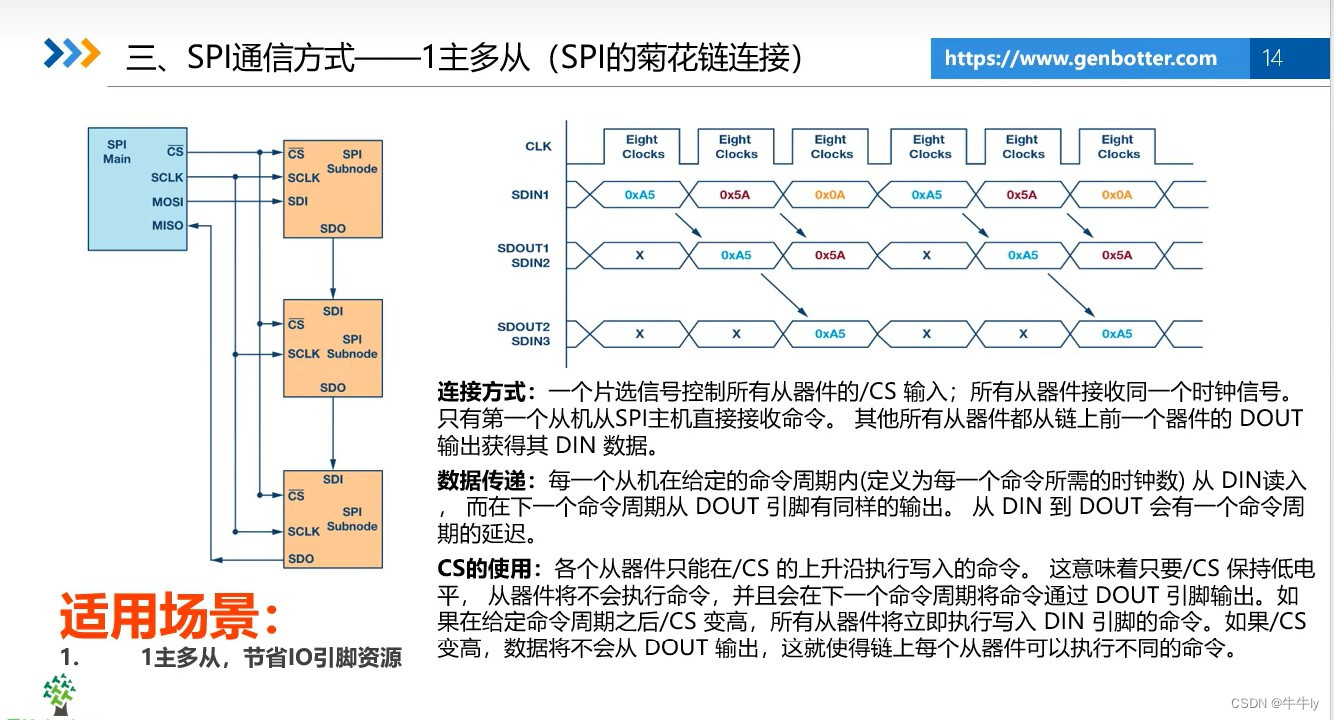
对从机比较多那么相应的片选引脚也需要更多。可以采用菊花链连接来减少I/o口。从而节省资源。
但这种连接对于SPI通信也会变的复杂。
5. SPI于IIC的比较
1. W25Q32介绍
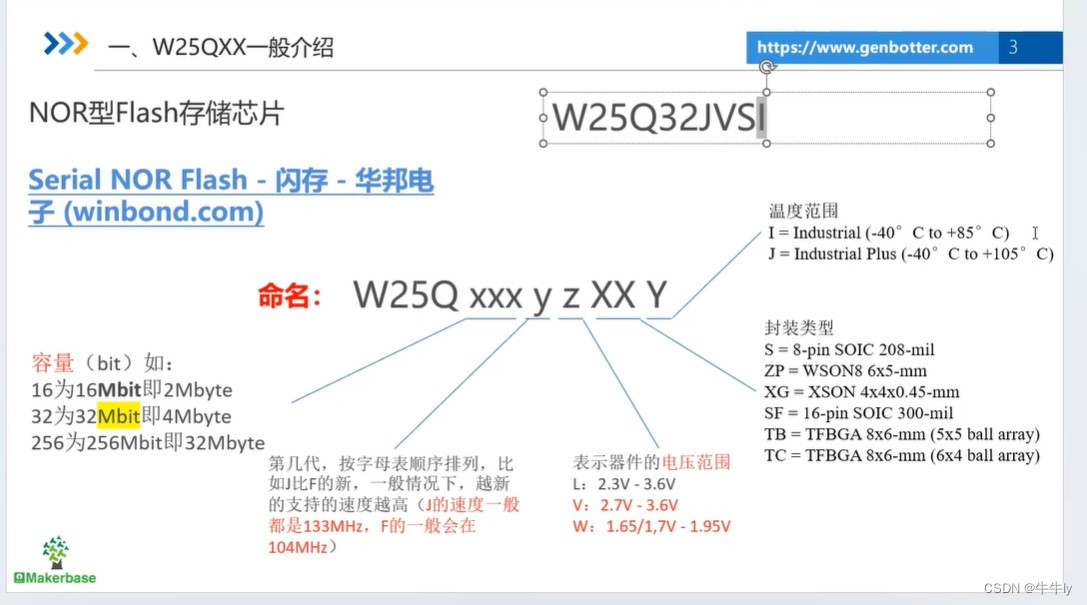
当MCU资源不够用就可以外接一个W25Qxx芯片。
1. W25Q32的命名。
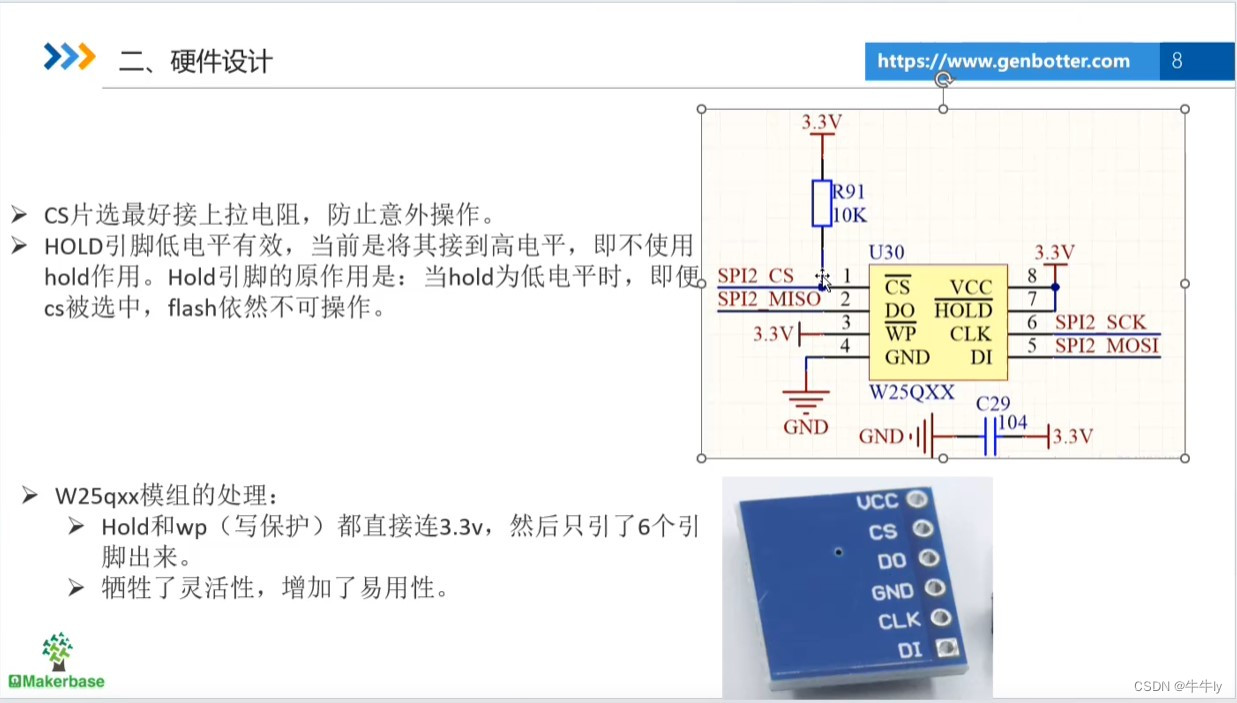
2. W25Q32的引脚。
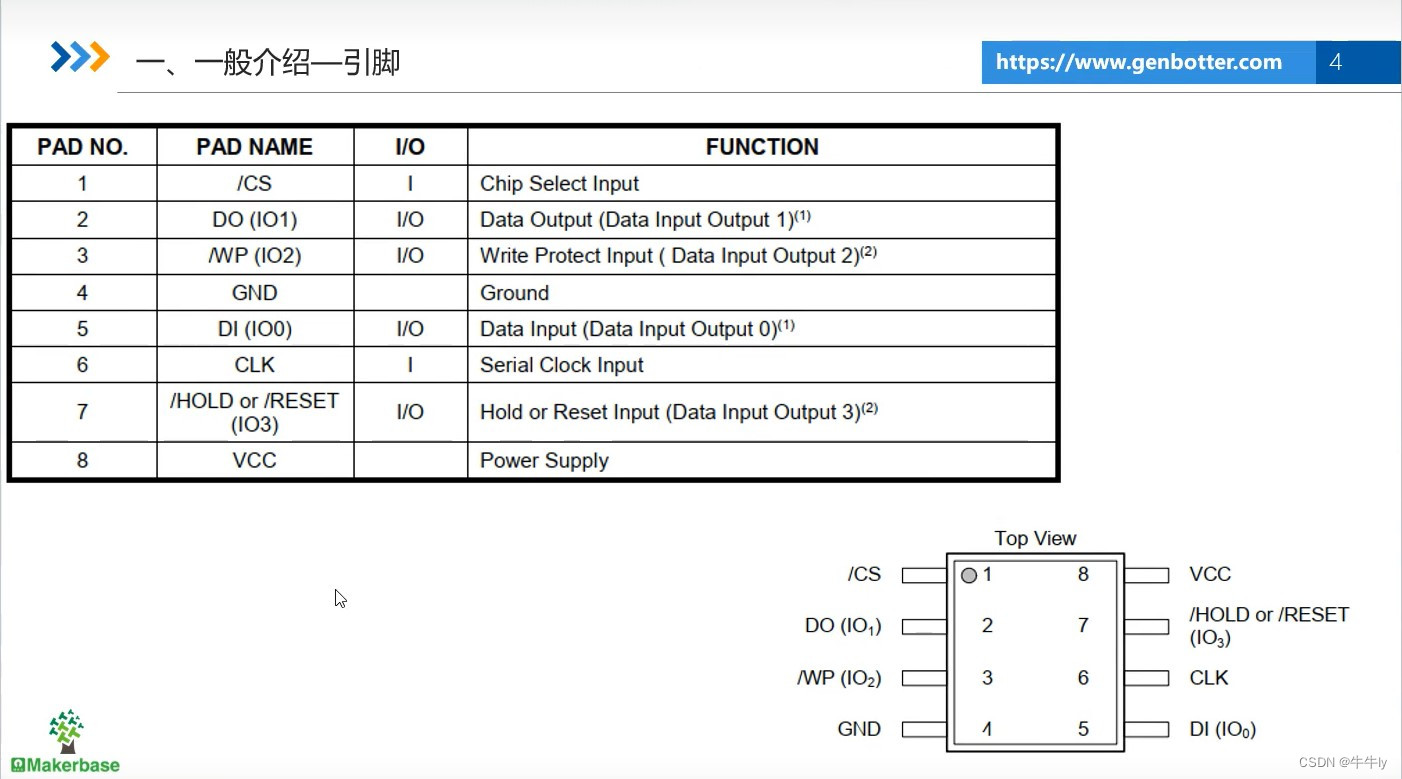
WP:写保护引脚 在进行写操作时先要取消写保护才能进行写操作。
/HOLD or /RESET:如果这个引脚有效。即使片选有效。W25Q32也不会生效相当于高组态。
其他引脚:CS DO DI CLK GND VCC。
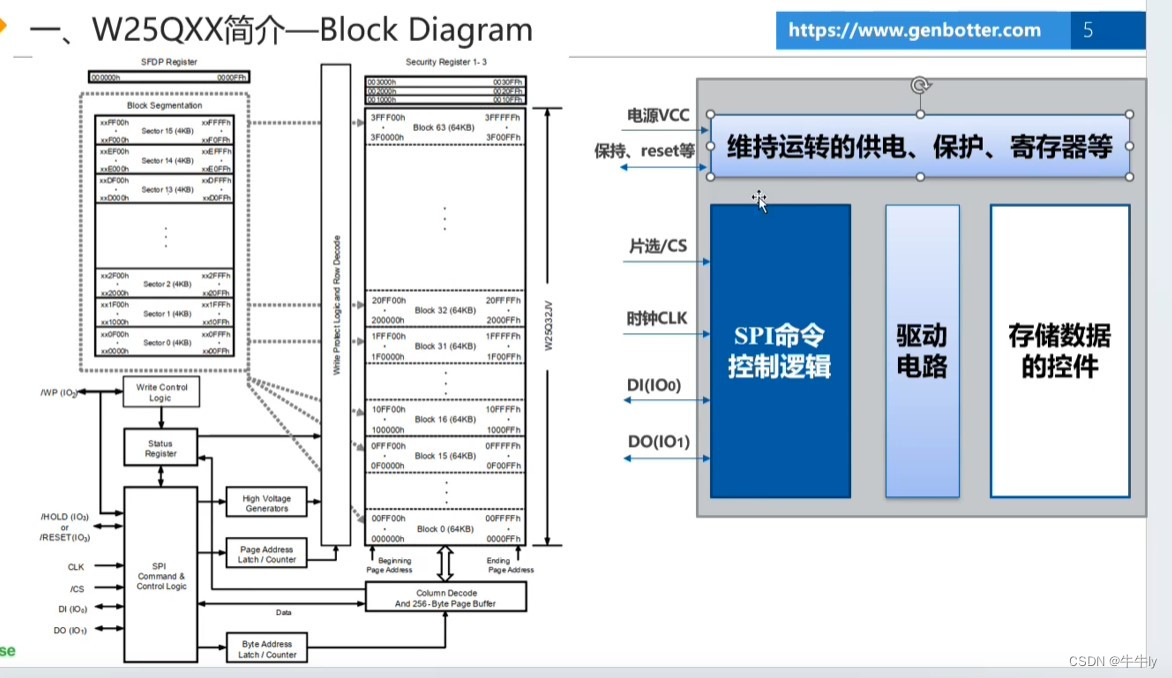
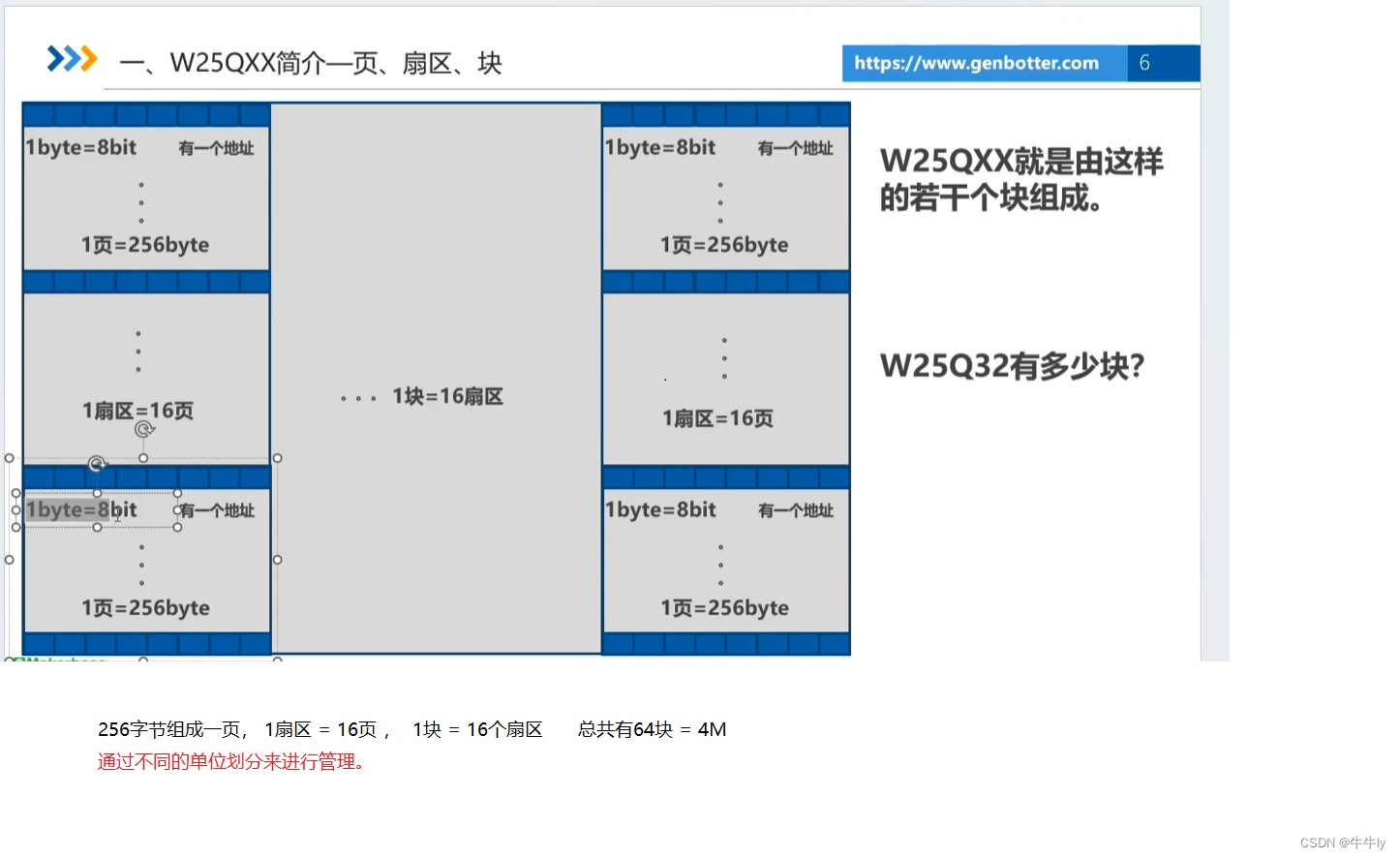
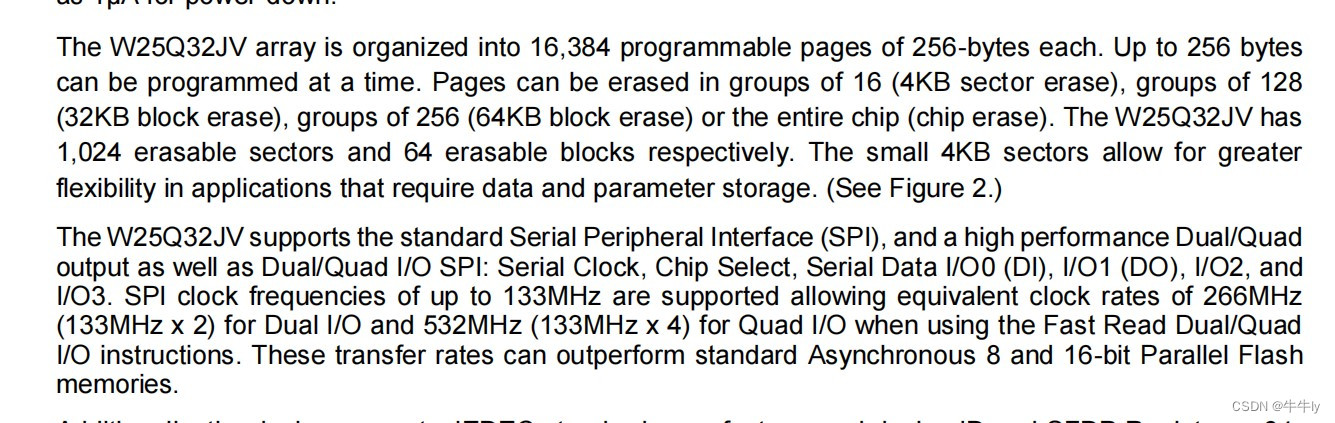
3. 存储划分的方便管理
对SPI发送的指令然后驱动电路对存储数据进行操作。
 4. w25Q32具体硬件图。
4. w25Q32具体硬件图。
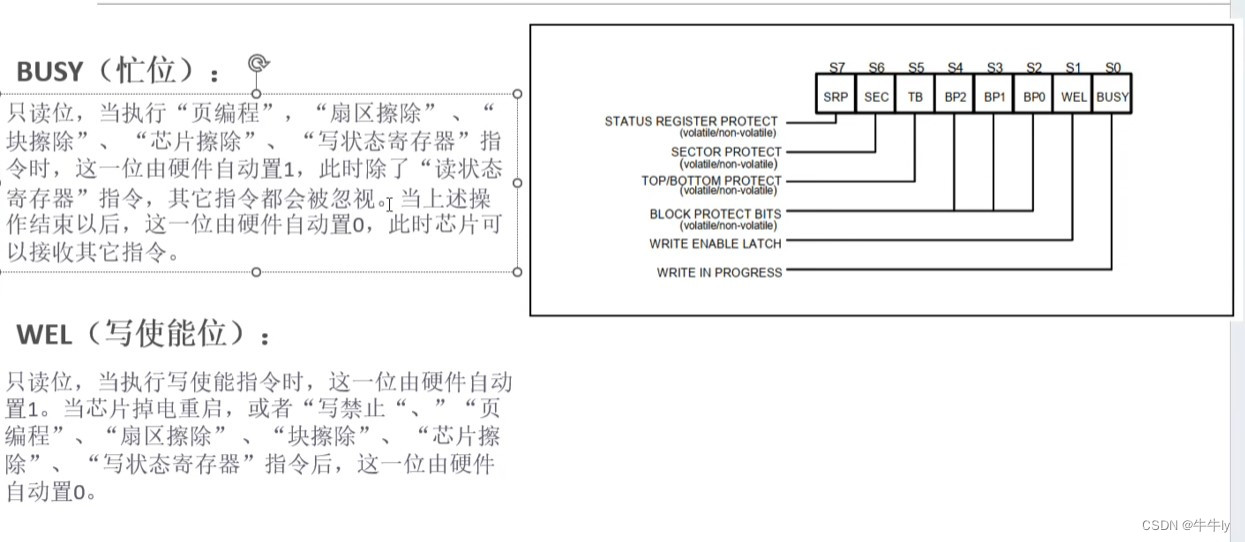
5. W25Q32的寄存器
只看状态寄存器1的低两位其余的自行查手册。
6. 指令操作。(具体看手册指令的作用以及指令发送怎么获取数据)
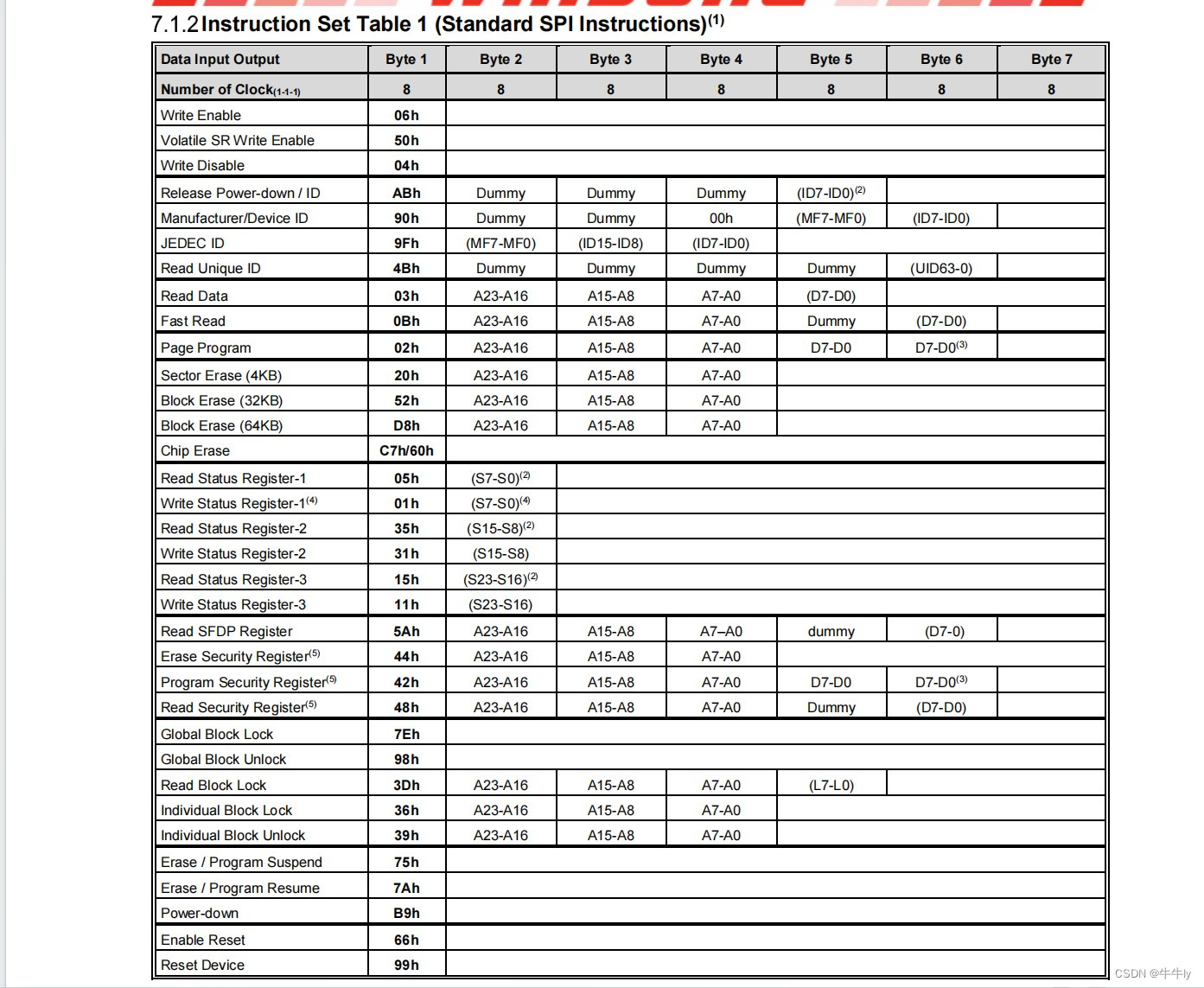
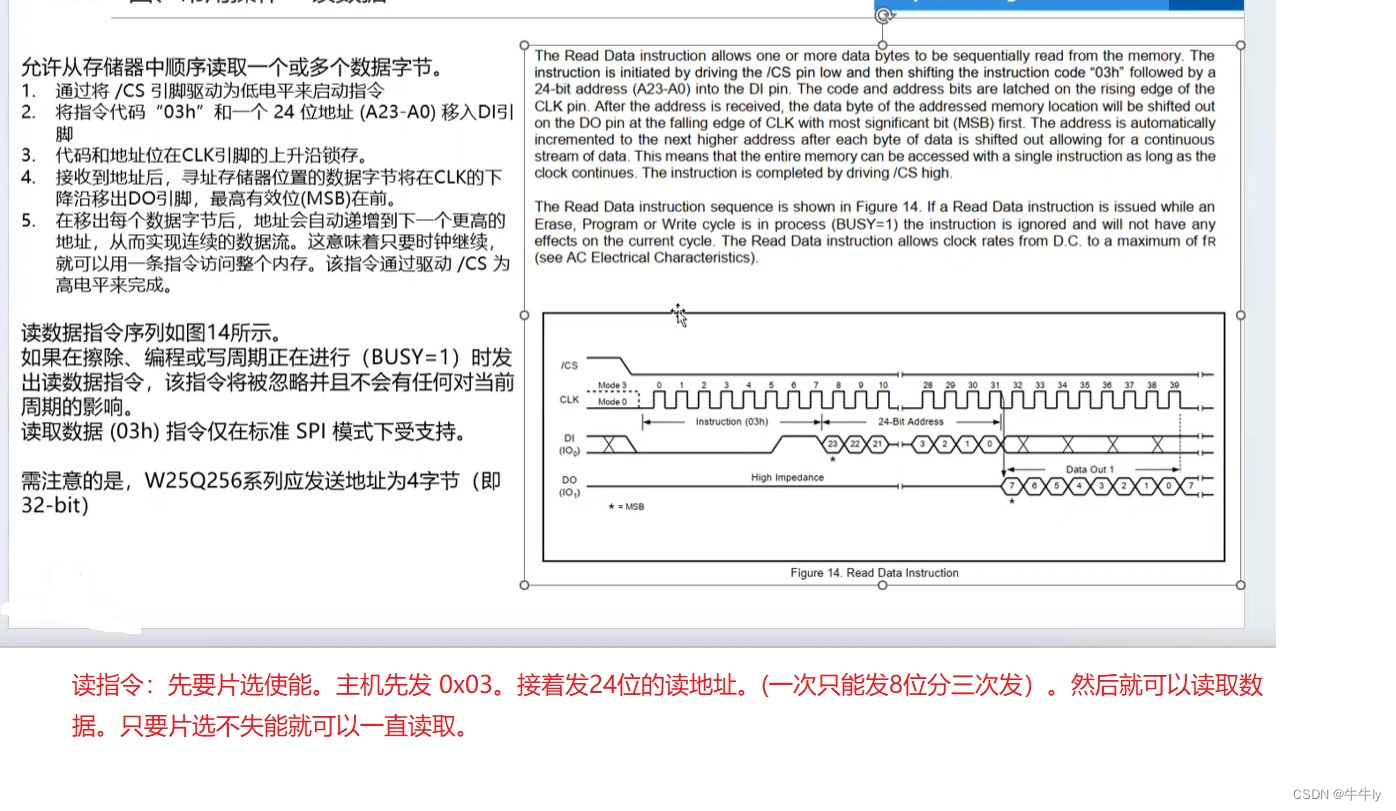
1. 读指令
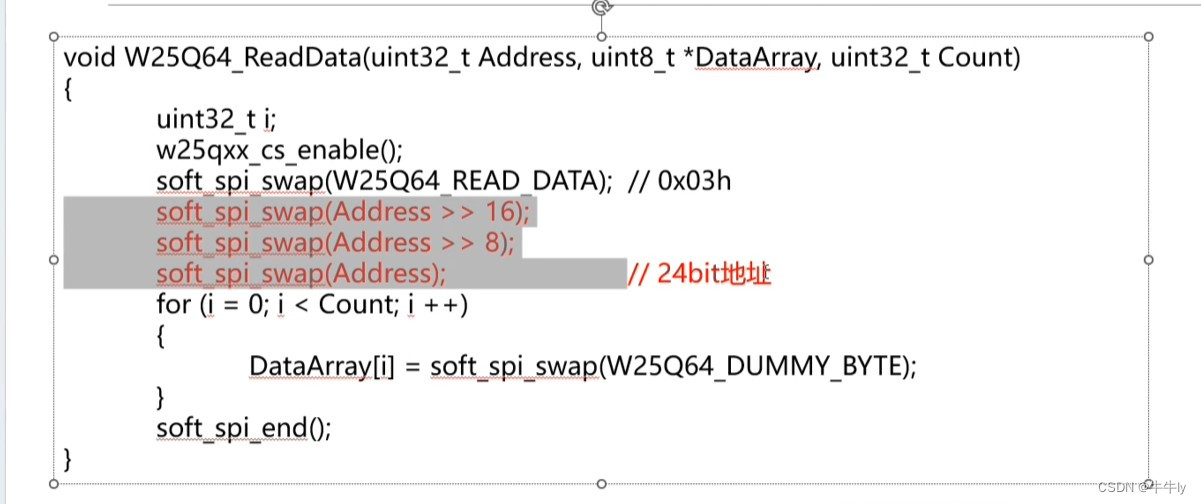
具体的伪代码
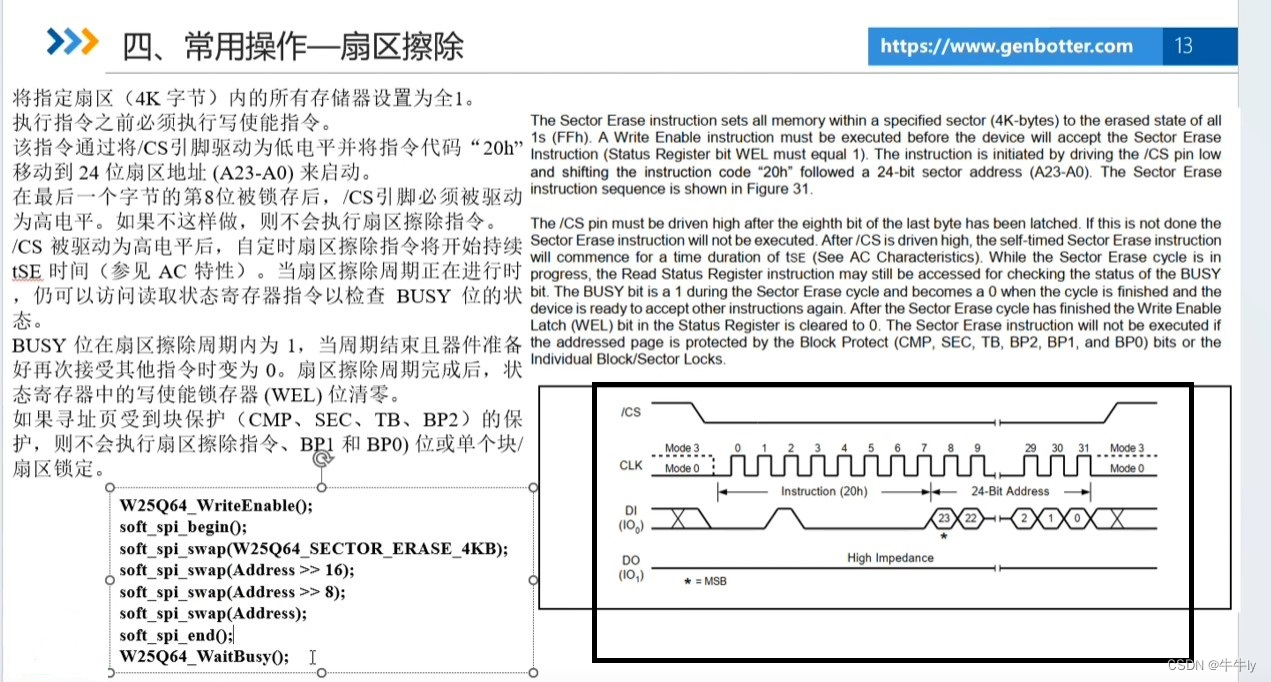
2. 擦除
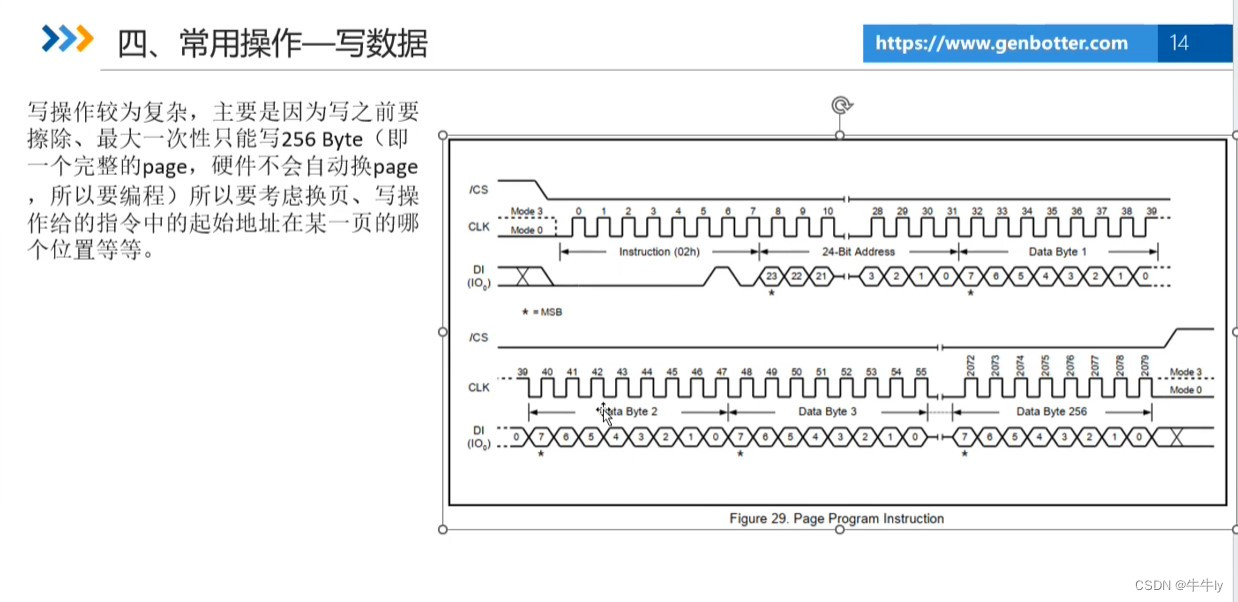
3. 写指令
3. dome 实现SPI读取W25Q32
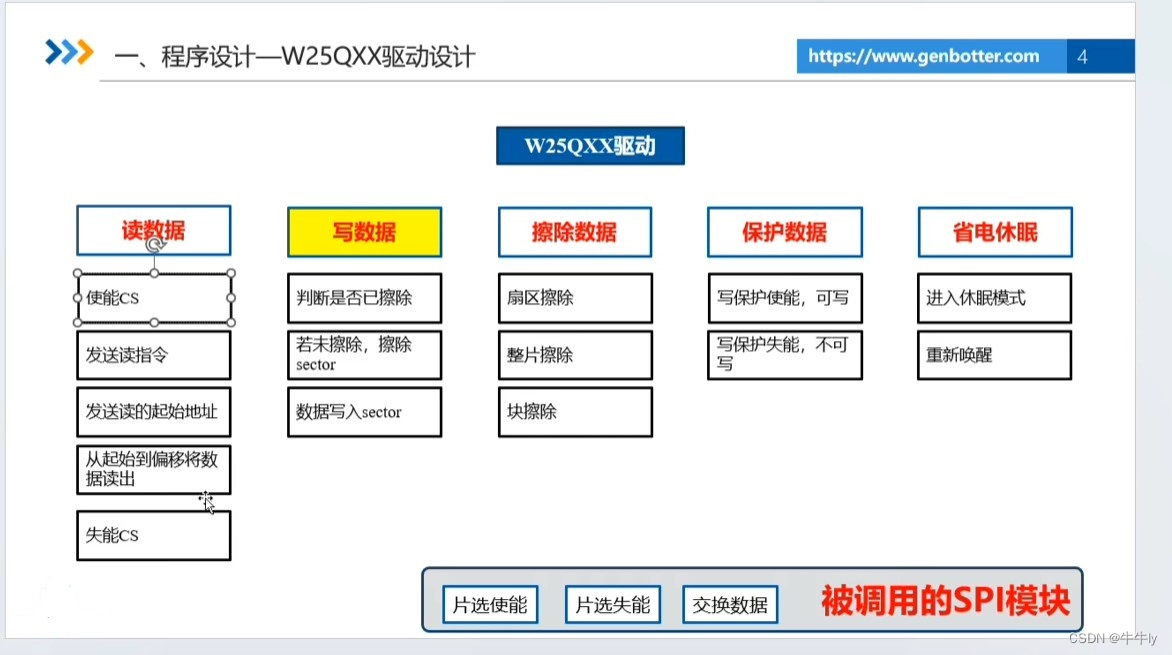
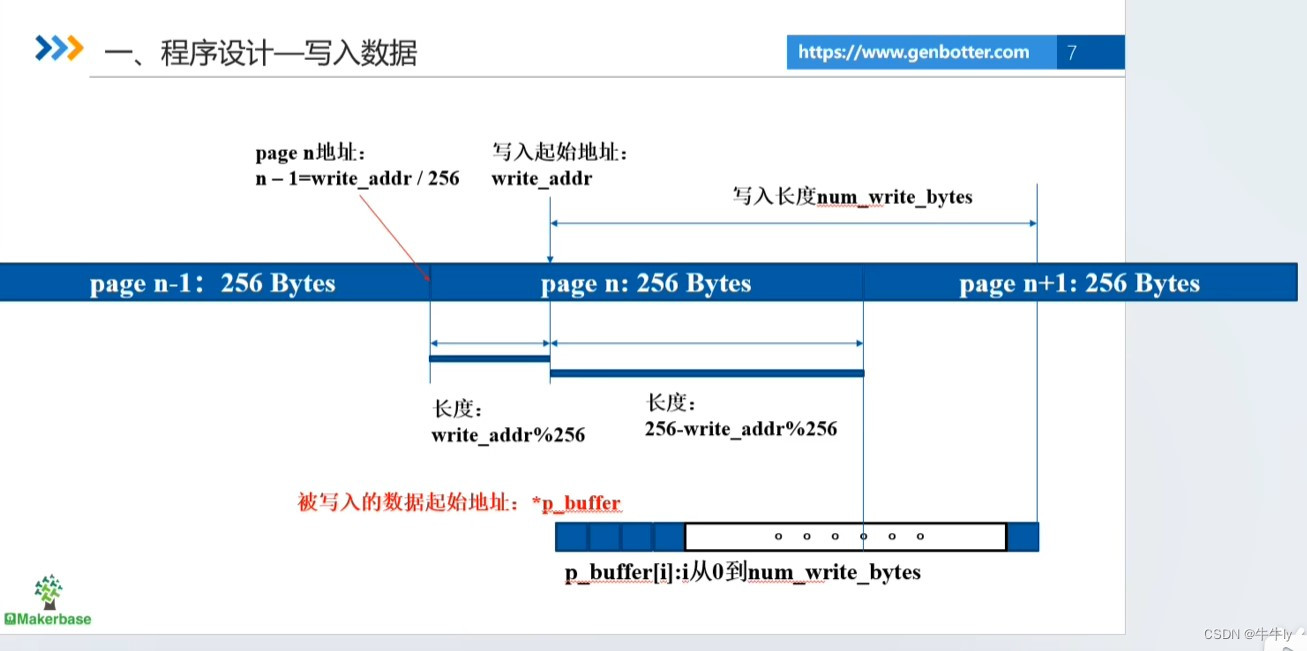
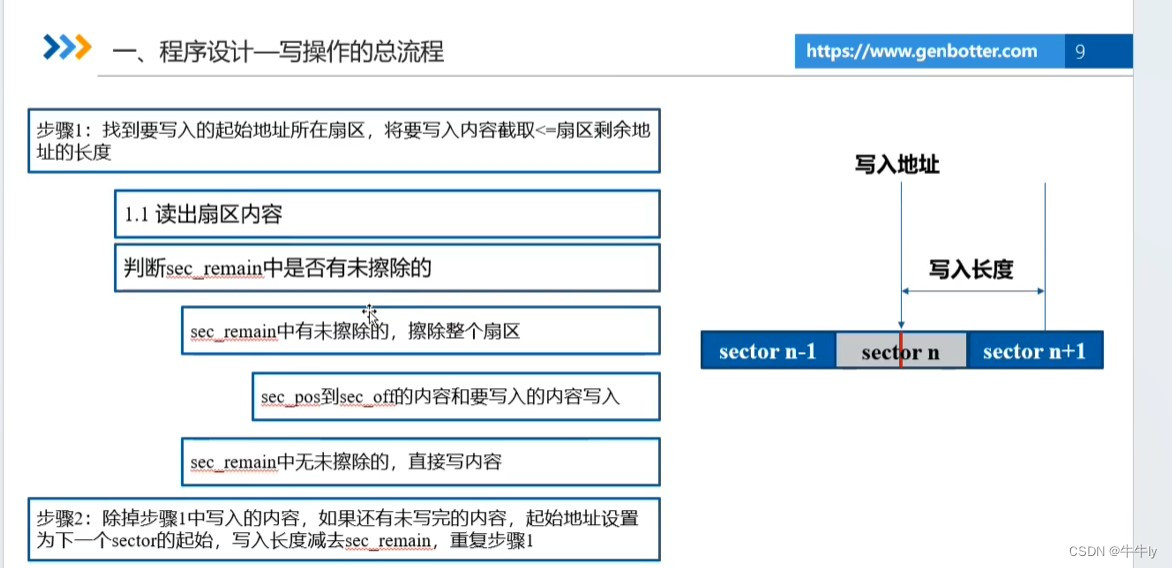
1. 程序设计

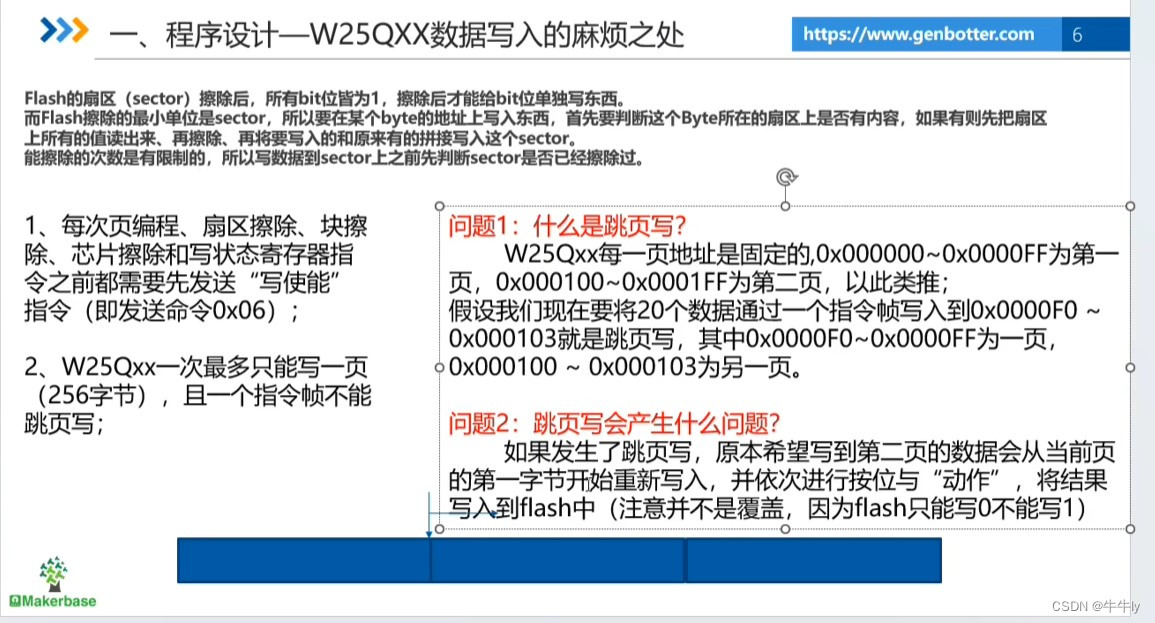
2. 写数据注意事项
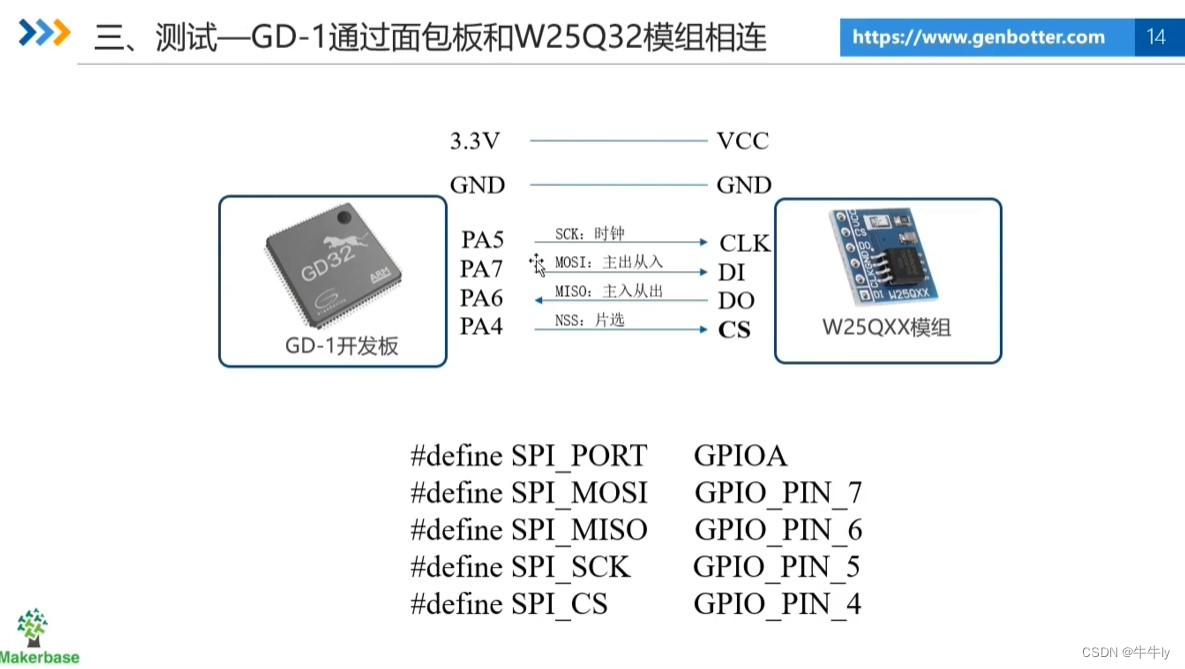
3. 具体的接线
因为是模拟SPI所以引脚可以任意设定。
这里选择是SCL = PA5 ,MOSI = PA7 ,MISO = PA6 ,CS = PA4。
soft_spi.h
#ifndef _SOFT_SPI_H
#define _SOFT_SPI_H
/**
filename: soft_spi.h
**/
#include "gd32f10x.h"
#include "systick.h"
//定义表示具体IO口的资源宏(模拟SPI的选用的引脚)
#define SPI_PORT GPIOA
#define SPI_MOSI GPIO_PIN_7
#define SPI_MISO GPIO_PIN_6
#define SPI_SCK GPIO_PIN_5
#define SPI_CS GPIO_PIN_4
/* SPI的模式 */
#define SPI_MODE0 0
#define SPI_MODE1 1
#define SPI_MODE2 2
#define SPI_MODE3 3
void soft_spi_init(void); // spi通信准备,初始化
void soft_spi_init_io(void); // 初始化spi通信用到的io口
void soft_spi_init_mode(uint8_t spi_mode); // 初始化spi通信模式,时钟相位和时钟极性
void soft_spi_begin(void); // 开始spi通信
void soft_spi_w_cs(uint8_t bit_value); // 写片选cs口
uint8_t soft_spi_swap(uint8_t byte_to_send); /* 交换数据 */
void soft_spi_w_sck(uint8_t bit_value); // 写时钟口
void soft_spi_w_mosi(uint8_t bit_value); // 写MOSI口
uint8_t soft_spi_r_miso(void); // 读MISO口
void soft_spi_end(void); // 结束spi通信
#endifsoft_spi.c
#include "soft_spi.h"
uint8_t clock_polar;
uint8_t clock_phase;
// spi通信准备,初始化
void soft_spi_init(void){
soft_spi_init_io();
soft_spi_init_mode(SPI_MODE0);
}
// 初始化spi通信用到的io口
void soft_spi_init_io(void){
rcu_periph_clock_enable(RCU_GPIOA); /* 使能GPIOA时钟 */
gpio_init(SPI_PORT, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, SPI_MOSI|SPI_SCK|SPI_CS); /* MOSI, SCK, CS 配置成推挽输出 */
gpio_init(SPI_PORT, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ, SPI_MISO); /* MISO 输入模式 */
}
// 初始化spi通信模式,时钟相位和时钟极性
void soft_spi_init_mode(uint8_t spi_mode){
switch(spi_mode){
case SPI_MODE0:
clock_polar = 0;
clock_phase = 0;
break;
case SPI_MODE1:
clock_polar = 0;
clock_phase = 1;
break;
case SPI_MODE2:
clock_polar = 1;
clock_phase = 0;
break;
case SPI_MODE3:
clock_polar = 1;
clock_phase = 1;
break;
default:
break;
}
}
// 开始spi通信
void soft_spi_begin(void){
soft_spi_w_cs((bit_status)0); /* 把从机的片选拉低 */
}
// 写片选cs口
void soft_spi_w_cs(uint8_t bit_value){
gpio_bit_write(SPI_PORT, SPI_CS, (bit_status)bit_value);
}
/*
重要函数,spi主机的移位寄存器与spi从机移位寄存器交换数值
*/
uint8_t soft_spi_swap(uint8_t byte_to_send){
uint8_t byte_receive = 0x00;
uint8_t i;
for(i = 0; i < 8; i++){
soft_spi_w_sck(clock_polar ? 1:0); /* 先有一个SCLghh空闲 */
delay_1us(1);
if(clock_phase){
if(soft_spi_r_miso() == 1)byte_receive |= (0x80 >> i); /* 采集数据 */
soft_spi_w_sck(clock_phase ? 0 : 1);
delay_1us(1);
soft_spi_w_mosi(byte_to_send & (0x80 >> i)); /* 先写 */
}else{
soft_spi_w_mosi(byte_to_send & (0x80 >> i)); /* 先写 */
soft_spi_w_sck(clock_phase ? 0 : 1); /* 产生沿 */
delay_1us(1);
if(soft_spi_r_miso() == 1)byte_receive |= (0x80 >> i); /* 采集数据 */
}
}
return byte_receive;
}
// 写时钟口
void soft_spi_w_sck(uint8_t bit_value){
gpio_bit_write(SPI_PORT, SPI_SCK, (bit_status)bit_value);
}
// 写MOSI口
void soft_spi_w_mosi(uint8_t bit_value){
gpio_bit_write(SPI_PORT, SPI_MOSI, (bit_status)bit_value);
}
// 读MISO口
uint8_t soft_spi_r_miso(void){
return gpio_input_bit_get(SPI_PORT, SPI_MISO);
}
// 结束spi通信
void soft_spi_end(void){
soft_spi_w_sck(clock_polar ? 1:0); /* 根据模式来选择空闲电平 */
soft_spi_w_cs((bit_status)1); /* 片选拉高 */
}
w25qxx_spi.h
#ifndef _W25QXX_SPI_H
#define _W25QXX_SPI_H
#include "gd32f10x.h"
#include "w25qxx_ins.h"
#include "soft_spi.h"
#define W25QXX_ID_1 1
#define W25QXX_SR_ID_1 1
#define W25QXX_SR_ID_2 2
#define W25QXX_SR_ID_3 3
void w25qxx_init(void);
void w25qxx_wait_busy(void);
uint8_t w25qxx_read_sr(uint8_t sregister_id); // 读状态寄存器
void w25qxx_read(uint8_t *p_buffer, uint32_t read_addr, uint16_t num_read_bytes);
void w25qxx_write(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes);
void w25qxx_write_nocheck(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes);
void w25qxx_write_page(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes);
void w25qxx_erase_sector(uint32_t sector_addr);
void w25qxx_erase_chip(void);
void w25qxx_write_enable(void);
void w25qxx_write_disable(void);
void w25qxx_power_down(void);
void w25qxx_wake_up(void);
void w25qxx_cs_enable(uint8_t cs_id);
void w25qxx_cs_disable(uint8_t cs_id);
uint8_t w25qxx_swap(uint8_t byte_to_send);
#endif
w25qxx_spi.c
#include "w25qxx_spi.h"
/* w25Q的初始化 */
void w25qxx_init(void){
soft_spi_init();
}
// 如果SR-1的BUSY位为1的话,一直等待,直到BUSY位为0,结束等待
// 判断是否在忙
void w25qxx_wait_busy(void){
while((w25qxx_read_sr(W25QXX_SR_ID_1) & 0x01) == 0x01){
;
}
}
// 读状态寄存器
uint8_t w25qxx_read_sr(uint8_t sregister_id){
uint8_t command, result;
switch(sregister_id){
case W25QXX_SR_ID_1:
command = W25QXX_READ_STATUS_REGISTER_1;
break;
case W25QXX_SR_ID_2:
command = W25QXX_READ_STATUS_REGISTER_2;
break;
case W25QXX_SR_ID_3:
command = W25QXX_READ_STATUS_REGISTER_3;
break;
default:
command = W25QXX_READ_STATUS_REGISTER_1;
break;
}
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(command);
result = w25qxx_swap(0xFF);
w25qxx_cs_disable(W25QXX_ID_1);
return result;
}
// 读flash的数据
// *p_buffer 读回的数据的存放位置
void w25qxx_read(uint8_t *p_buffer, uint32_t read_addr, uint16_t num_read_bytes){
uint16_t i;
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_READ_DATA); //发送读数据的指令
w25qxx_swap(read_addr >> 16); //发送24bit地址
w25qxx_swap(read_addr >> 8);
w25qxx_swap(read_addr);
for(i=0; i < num_read_bytes; i++){
p_buffer[i] = w25qxx_swap(0xFF);
}
w25qxx_cs_disable(W25QXX_ID_1);
}
//
uint8_t W25QXX_Buffer[4096]; //用来存放从sector读出的bytes
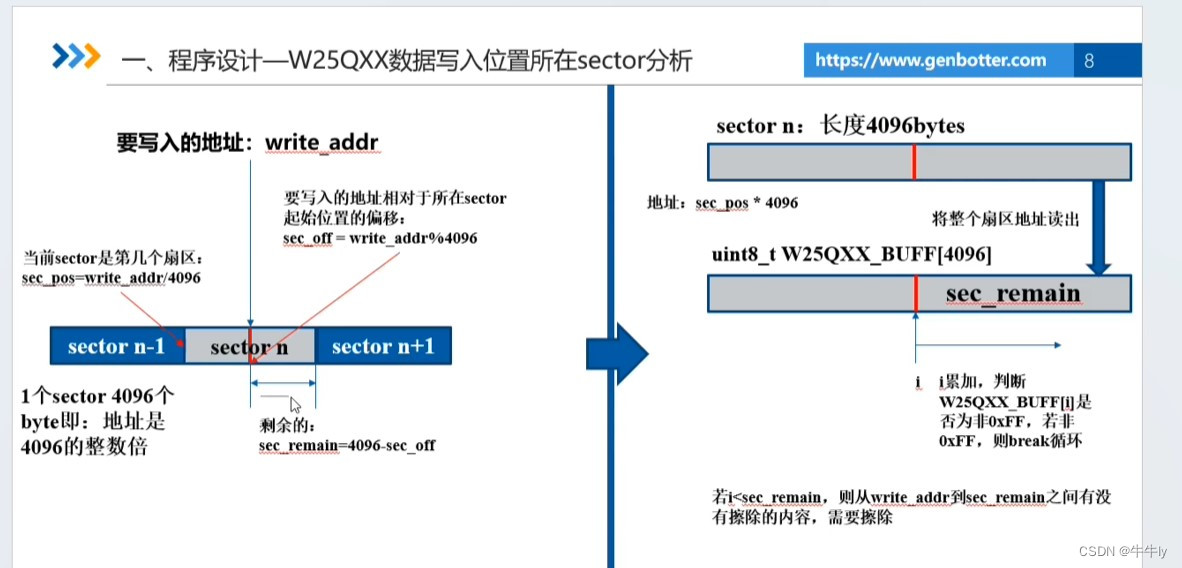
void w25qxx_write(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes){
uint32_t sec_num;
uint16_t sec_remain;
uint16_t sec_off;
uint16_t i;
sec_num = write_addr / 4096; //要写入的位置处在第sec_num个扇区上
sec_off = write_addr % 4096;
sec_remain = 4096 - sec_off;
if(num_write_bytes <= sec_remain){
w25qxx_read(W25QXX_Buffer, sec_num * 4096, 4096); //扇区的数据读出来
for(i = 0; i < sec_remain; i++){
if(W25QXX_Buffer[i + sec_off] != 0xFF) //说明这个扇区的第i+sec_off位没有擦除
break;
}
if(i < sec_remain){ // 扇区没有擦除
w25qxx_erase_sector(sec_num * 4096);
for(i = 0; i < sec_remain; i++){
W25QXX_Buffer[i + sec_off] = p_buffer[i];
}
w25qxx_write_nocheck(W25QXX_Buffer, sec_num * 4096, 4096);
}else{ // 扇区sec_remain部分是擦除过的
w25qxx_write_nocheck(p_buffer, write_addr, num_write_bytes);
}
}else{
w25qxx_read(W25QXX_Buffer, sec_num * 4096, 4096); //扇区的数据读出来
for(i = 0; i < sec_remain; i++){
if(W25QXX_Buffer[i + sec_off] != 0xFF) //说明这个扇区的第i+sec_off位没有擦除
break;
}
if(i < sec_remain){ // 扇区没有擦除
w25qxx_erase_sector(sec_num * 4096);
for(i = 0; i < sec_remain; i++){
W25QXX_Buffer[i + sec_off] = p_buffer[i];
}
w25qxx_write_nocheck(W25QXX_Buffer, sec_num * 4096, 4096);
}else{ // 扇区sec_remain部分是擦除过的
w25qxx_write_nocheck(p_buffer, write_addr, sec_remain);
}
write_addr += sec_remain;
p_buffer += sec_remain;
num_write_bytes -= sec_remain;
w25qxx_write(p_buffer, write_addr, num_write_bytes);
}
//判断读出来的数据是否都为0xFF
//扇区是否删除
//判断是否跨页
}
// 调用之前先确保扇区删除
void w25qxx_write_nocheck(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes){
uint16_t page_remain = 256 - write_addr % 256;
if(num_write_bytes <= page_remain){
w25qxx_write_page(p_buffer, write_addr, num_write_bytes);
}else{
w25qxx_write_page(p_buffer, write_addr, page_remain);
p_buffer += page_remain;
write_addr += page_remain;
num_write_bytes -= page_remain;
w25qxx_write_nocheck(p_buffer, write_addr, num_write_bytes);
}
}
// page program
// 保证没有跨页写的前提下调用此函数往某个页上写内容
void w25qxx_write_page(uint8_t *p_buffer, uint32_t write_addr, uint16_t num_write_bytes){
uint16_t i;
w25qxx_write_enable();
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_PAGE_PROGRAM);
w25qxx_swap(write_addr >> 16); //发送24bit地址
w25qxx_swap(write_addr >> 8);
w25qxx_swap(write_addr);
for(i = 0; i < num_write_bytes; i++){
w25qxx_swap(p_buffer[i]);
}
w25qxx_cs_disable(W25QXX_ID_1);
w25qxx_wait_busy();
}
/* 擦除一个扇区 */
void w25qxx_erase_sector(uint32_t sector_addr){
w25qxx_write_enable();
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_SECTOR_ERASE_4KB);
w25qxx_swap(sector_addr >> 16);
w25qxx_swap(sector_addr >> 8);
w25qxx_swap(sector_addr);
w25qxx_cs_disable(W25QXX_ID_1);
w25qxx_wait_busy();
}
/* 擦除全部 */
void w25qxx_erase_chip(void){
w25qxx_write_enable();
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_CHIP_ERASE);
w25qxx_cs_disable(W25QXX_ID_1);
w25qxx_wait_busy();
}
/* 使能写保护 */
void w25qxx_write_enable(void){
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_WRITE_ENABLE);
w25qxx_cs_disable(W25QXX_ID_1);
}
/* 失能写保护 */
void w25qxx_write_disable(void){
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_WRITE_DISABLE);
w25qxx_cs_disable(W25QXX_ID_1);
}
// 低电量休眠
void w25qxx_power_down(void){
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_POWER_DOWN);
w25qxx_cs_disable(W25QXX_ID_1);
}
// 唤醒
void w25qxx_wake_up(void){
w25qxx_cs_enable(W25QXX_ID_1);
w25qxx_swap(W25QXX_RELEASE_POWER_DOWN_HPM_DEVICE_ID);
w25qxx_cs_disable(W25QXX_ID_1);
}
/*
brief:使能片选引脚cs
cs_id: cs引脚的序号,即第几个w25qxx flash
*/
void w25qxx_cs_enable(uint8_t cs_id){
switch(cs_id){
case W25QXX_ID_1:
soft_spi_begin();
break;
default:
break;
}
}
// brief:失能片选引脚cs
void w25qxx_cs_disable(uint8_t cs_id){
switch(cs_id){
case W25QXX_ID_1:
soft_spi_end();
break;
default:
break;
}
}
/*
**** 交换数据
*/
uint8_t w25qxx_swap(uint8_t byte_to_send){
return soft_spi_swap(byte_to_send);
}
w25qxx_ins.h (w25Q32的指令集)
#ifndef _W25QXX_INS_H
#define _W25QXX_INS_H
#define W25QXX_WRITE_ENABLE 0x06
#define W25QXX_WRITE_DISABLE 0x04
#define W25QXX_READ_STATUS_REGISTER_1 0x05
#define W25QXX_READ_STATUS_REGISTER_2 0x35
#define W25QXX_READ_STATUS_REGISTER_3 0x15
#define W25QXX_READ_DATA 0x03
#define W25QXX_READ_UNIQUE_ID 0x4B
#define W25QXX_WRITE_STATUS_REGISTER_1 0x01
#define W25QXX_WRITE_STATUS_REGISTER_2 0x31
#define W25QXX_WRITE_STATUS_REGISTER_3 0x11
#define W25QXX_PAGE_PROGRAM 0x02
#define W25QXX_QUAD_PAGE_PROGRAM 0x32
#define W25QXX_BLOCK_ERASE_64KB 0xD8
#define W25QXX_BLOCK_ERASE_32KB 0x52
#define W25QXX_SECTOR_ERASE_4KB 0x20
#define W25QXX_CHIP_ERASE 0xC7
#define W25QXX_ERASE_SUSPEND 0x75
#define W25QXX_ERASE_RESUME 0x7A
#define W25QXX_POWER_DOWN 0xB9
#define W25QXX_HIGH_PERFORMANCE_MODE 0xA3
#define W25QXX_CONTINUOUS_READ_MODE_RESET 0xFF
#define W25QXX_RELEASE_POWER_DOWN_HPM_DEVICE_ID 0xAB
#define W25QXX_MANUFACTURER_DEVICE_ID 0x90
#define W25QXX_JEDEC_ID 0x9F
#define W25QXX_FAST_READ 0x0B
#define W25QXX_FAST_READ_DUAL_OUTPUT 0x3B
#define W25QXX_FAST_READ_DUAL_IO 0xBB
#define W25QXX_FAST_READ_QUAD_OUTPUT 0x6B
#define W25QXX_FAST_READ_QUAD_IO 0xEB
#define W25QXX_OCTAL_WORD_READ_QUAD_IO 0xE3
#define W25QXX_DUMMY_BYTE 0xFF
#endif
对于w25Q3的写操作是比较复杂的。比如要考虑写的大小是否大于一页.以及在写之前要判断是否擦除。因为要先擦除才能写入。