视频讲解
-
【第1季】6.第6章_机器人底盘-视频讲解
-
【第1季】6.1.第6章_机器人底盘_底盘运动学模型-视频讲解
-
【第1季】6.2.第6章_机器人底盘_底盘性能指标-视频讲解
-
【第1季】6.3.第6章_机器人底盘_典型机器人底盘搭建-视频讲解
第1季:第6章_机器人底盘
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------









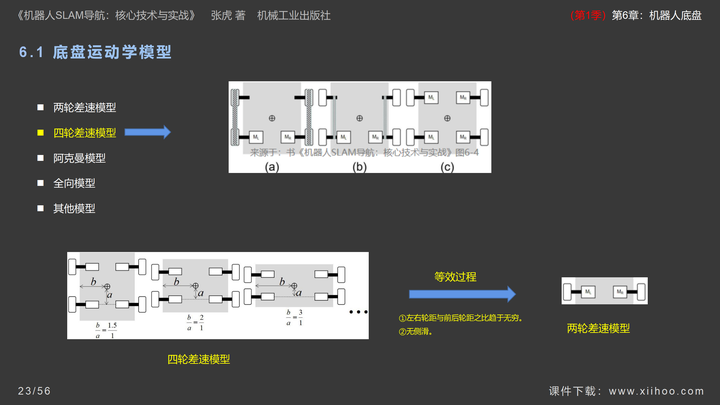
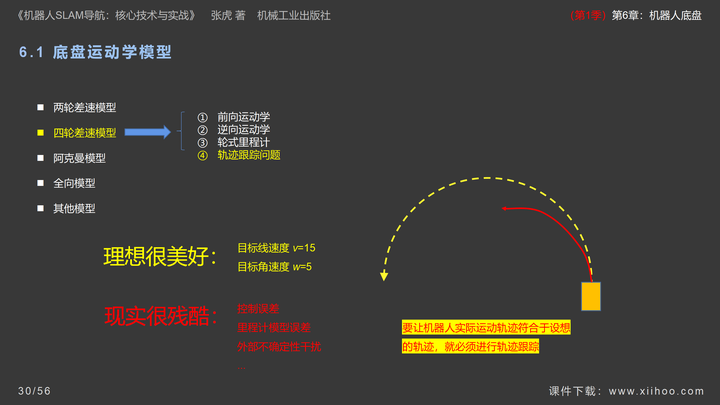
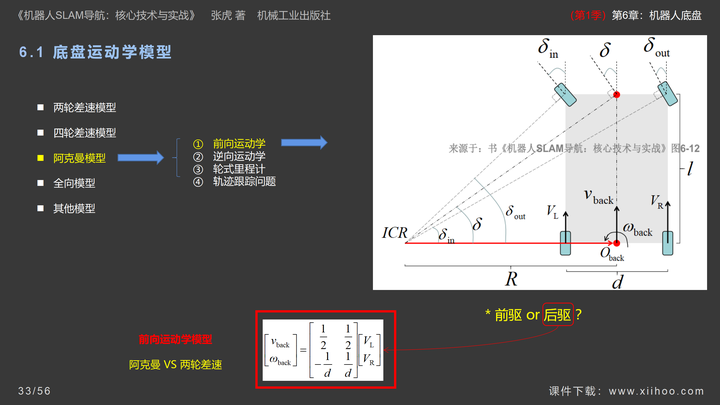
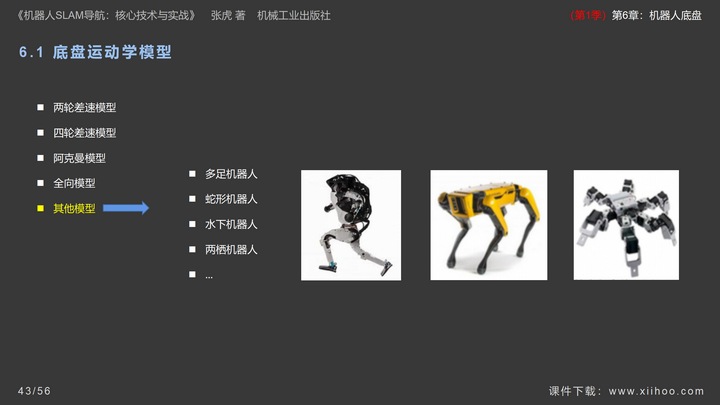
6.1 底盘运动学模型
①两轮差速模型
②四轮差速模型
③阿克曼模型
④全向模型
⑤其他模型






























6.2 底盘性能指标
①载重能力
②动力性能
③控制精度
④里程计精度




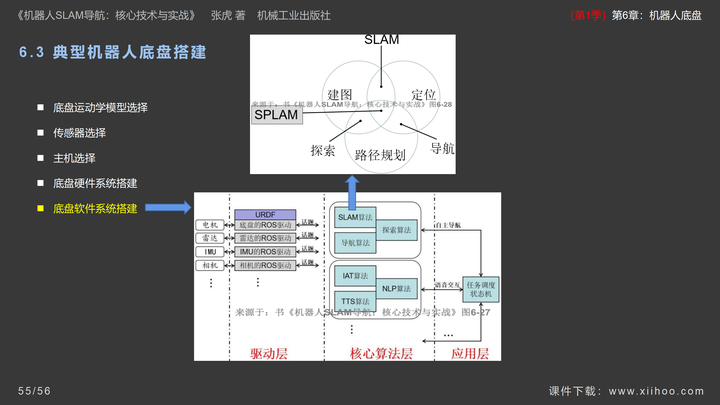
6.3 典型机器人底盘搭建
①底盘运动学模型选择
②传感器选择
③主机选择
④底盘硬件系统搭建
⑤底盘软件系统搭建





例程源码下载
-
Github下载:github.com/xiihoo/Books_Robot_SLAM_Navigation
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
http://xiihoo.com/static/file/PPT/1-%E7%AC%AC1%E5%AD%A3%EF%BC%9A%E7%AC%AC6%E7%AB%A0_%E6%9C%BA%E5%99%A8%E4%BA%BA%E5%BA%95%E7%9B%98.pptx
PDF课件下载:
http://xiihoo.com/static/file/PPT/1-%E7%AC%AC1%E5%AD%A3%EF%BC%9A%E7%AC%AC6%E7%AB%A0_%E6%9C%BA%E5%99%A8%E4%BA%BA%E5%BA%95%E7%9B%98.pdf





![[架构之路-229]:计算机体硬件与系结构 - 计算机系统的矩阵知识体系结构](https://img-blog.csdnimg.cn/badf170c603942368ece3b5374cf9632.png)