驱动框架
- 多点电容触摸芯片的接口,一般都为 I2C 接口,因此驱动主框架肯定是 I2C。
当设备树中触摸 IC的设备节点和驱动匹配以后 。进入probe入口函数。在此函数中初始化触摸 IC,中断和 input 子系统等
- linux 里面一般都是通过中断来上报触摸点坐标信息,因此需要用到中断框架。
在中断服务程序中上报读取到的坐标信息,根据所使用的多点电容触摸设备类型选择使用 Type A 还是 Type B 时序
- 触摸屏的坐标信息、屏幕按下和抬起信息都属于 linux 的 input 子系统,因此向 linux 内
核上报触摸屏坐标信息就得使用 input 子系统 。 - 在中断处理程序中按照 linux 的 MT 协议上报坐标信息。
input 子系统下的多点电容触摸协议
触摸屏坐标信息时,需要按照MT协议来上报
MT 协议被分为两种类型, TypeA 和 TypeB,这两种类型的区别如下:
Type A:适用于触摸点不能被区分或者追踪,此类型的设备上报原始数据(此类型在实际使用中非常少! 。
Type B:适用于有硬件追踪并能区分触摸点的触摸设备,此类型设备通过 slot 更新某一个触摸点的信息, FT5426 就属于此类型,一般的多点电容触摸屏 IC 都有此能力
触摸点的信息通过一系列的 ABS_MT 事件(有的资料也叫消息)上报给 linux 内核,只有ABS_MT 事件是用于多点触摸的, 常用的是一下几类



触摸点数据上报时序
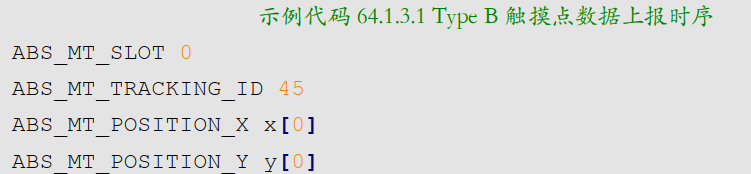
- 第 1 行,上报 ABS_MT_SLOT 事件,也就是触摸点对应的 SLOT。每次上报一个触摸点坐
标之前要先使用input_mt_slot函数上报当前触摸点SLOT,触摸点的SLOT其实就是触摸点ID,需要由触摸 IC 提供。 - 第 2 行,根据 Type B 的要求,每个 SLOT 必须关联一个 ABS_MT_TRACKING_ID,通过修改 SLOT 关联的 ABS_MT_TRACKING_ID 来完成对触摸点的添加、替换或删除。具体用到的函数就是 input_mt_report_slot_state,如果是添加一个新的触摸点,那么此函数的第三个参数active 要设置为 true, linux 内核会自动分配一个ABS_MT_TRACKING_ID 值,不需要用户去指定具体的 ABS_MT_TRACKING_ID 值。
- 第 3 行,上报触摸点 0 的 X 轴坐标,使用函数 input_report_abs 来完成。
- 第 4 行,上报触摸点 0 的 Y 轴坐标,使用函数 input_report_abs 来完成
驱动编写
I2C 驱动框架
当设备树中触摸 IC的设备节点和驱动匹配以后, probe 函数就会执行,可以在此函数中初始化触摸 IC,中断和 input 子系统等。
static int ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
}
/*
* @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行
* @param - client : i2c设备
* @return : 0,成功;其他负值,失败
*/
static int ft5x06_ts_remove(struct i2c_client *client)
{
/* 释放input_dev */
input_unregister_device(ft5x06.input);
return 0;
}
/*
* 传统驱动匹配表
*/
static const struct i2c_device_id ft5x06_ts_id[] = {
{ "edt-ft5206", 0, },
{ "edt-ft5426", 0, },
{ /* sentinel */ }
};
/*
* 设备树匹配表
*/
static const struct of_device_id ft5x06_of_match[] = {
{ .compatible = "edt,edt-ft5206", },
{ .compatible = "edt,edt-ft5426", },
{ /* sentinel */ }
};
/* i2c驱动结构体 */
static struct i2c_driver ft5x06_ts_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "edt_ft5x06",
.of_match_table = of_match_ptr(ft5x06_of_match),
},
.id_table = ft5x06_ts_id,
.probe = ft5x06_ts_probe,
.remove = ft5x06_ts_remove,
};
/*
* @description : 驱动入口函数
* @param : 无
* @return : 无
*/
static int __init ft5x06_init(void)
{
int ret = 0;
ret = i2c_add_driver(&ft5x06_ts_driver);
return ret;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit ft5x06_exit(void)
{
i2c_del_driver(&ft5x06_ts_driver);
}
module_init(ft5x06_init);
module_exit(ft5x06_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zuozhongkai");
初始化触摸 IC、中断和 input 子系统
struct ft5x06_dev {
struct device_node *nd; /* 设备节点 */
int irq_pin,reset_pin; /* 中断和复位IO */
int irqnum; /* 中断号 */
void *private_data; /* 私有数据 */
struct input_dev *input; /* input结构体 */
struct i2c_client *client; /* I2C客户端 */
};
static struct ft5x06_dev ft5x06;
/*
* @description : 根据i2c协议从FT5X06读取多个寄存器数据
* @param - dev: ft5x06设备
* @param - reg: 要读取的寄存器首地址
* @param - val: 读取到的数据
* @param - len: 要读取的数据长度
* @return : 操作结果
*/
static int ft5x06_read_regs(struct ft5x06_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->client;
/* msg[0],第一条写消息,发送要读取的寄存器首地址 */
msg[0].addr = client->addr; /* ft5x06地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg长度*/
/* msg[1],第二条读消息,读取寄存器数据 */
msg[1].addr = client->addr; /* ft5x06地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度*/
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
ret = -EREMOTEIO;
}
return ret;
}
/*
* @description : i2c驱动的probe函数,当驱动与
* 设备匹配以后此函数就会执行
* @param - client : i2c设备
* @param - id : i2c设备ID
* @return : 0,成功;其他负值,失败
*/
static int ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = 0;
ft5x06.client = client;
/* 1,获取设备树中的中断和复位引脚 */
ft5x06.irq_pin = of_get_named_gpio(client->dev.of_node, "interrupt-gpios", 0);
ft5x06.reset_pin = of_get_named_gpio(client->dev.of_node, "reset-gpios", 0);
/* 2,复位FT5x06 */
ret = ft5x06_ts_reset(client, &ft5x06);
if(ret < 0) {
goto fail;
}
/* 3,初始化中断 */
ret = ft5x06_ts_irq(client, &ft5x06);
if(ret < 0) {
goto fail;
}
/* 4,初始化FT5X06 */
ft5x06_write_reg(&ft5x06, FT5x06_DEVICE_MODE_REG, 0); /* 进入正常模式 */
ft5x06_write_reg(&ft5x06, FT5426_IDG_MODE_REG, 1); /* FT5426中断模式 */
/* 5,input设备注册
使用“devm_”前缀的函数申请到的资源可以由系统自动释放,不需要我们手动处理
*/
ft5x06.input = devm_input_allocate_device(&client->dev);
if (!ft5x06.input) {
ret = -ENOMEM;
goto fail;
}
/* 6,初始化input设备 */
ft5x06.input->name = client->name;
ft5x06.input->id.bustype = BUS_I2C;
ft5x06.input->dev.parent = &client->dev;
/* 7,设置事件类型 */
__set_bit(EV_KEY, ft5x06.input->evbit);
__set_bit(EV_ABS, ft5x06.input->evbit);
__set_bit(BTN_TOUCH, ft5x06.input->keybit);
/* 7,设置EV_ABS事件上报信息 */
input_set_abs_params(ft5x06.input, ABS_X, 0, 1024, 0, 0);
input_set_abs_params(ft5x06.input, ABS_Y, 0, 600, 0, 0);
input_set_abs_params(ft5x06.input, ABS_MT_POSITION_X,0, 1024, 0, 0);
input_set_abs_params(ft5x06.input, ABS_MT_POSITION_Y,0, 600, 0, 0);
/*8, 初始化多点电容触摸的 slots (触摸点)*/
ret = input_mt_init_slots(ft5x06.input, MAX_SUPPORT_POINTS, 0);
if (ret) {
goto fail;
}
/*8, 注册input设备*/
ret = input_register_device(ft5x06.input);
if (ret)
goto fail;
return 0;
fail:
return ret;
}上报坐标信息
在中断服务程序中上报读取到的坐标信息,根据所使用的多点电容触摸设备类型选择使用 Type A 还是 Type B 时序。
/*
* @description : FT5X06中断服务函数
* @param - irq : 中断号
* @param - dev_id : 设备结构。
* @return : 中断执行结果
*/
static irqreturn_t ft5x06_handler(int irq, void *dev_id)
{
struct ft5x06_dev *multidata = dev_id;
u8 rdbuf[29];
int i, type, x, y, id;
int offset, tplen;
int ret;
bool down;
offset = 1; /* 偏移1,也就是0X02+1=0x03,从0X03开始是触摸值 */
tplen = 6; /* 一个触摸点有6个寄存器来保存触摸值 */
memset(rdbuf, 0, sizeof(rdbuf)); /* 清除 */
/* 读取FT5X06触摸点坐标从0X02寄存器开始,连续读取29个寄存器 */
ret = ft5x06_read_regs(multidata, FT5X06_TD_STATUS_REG, rdbuf, FT5X06_READLEN);
if (ret) {
goto fail;
}
/* 上报每一个触摸点坐标 */
for (i = 0; i < MAX_SUPPORT_POINTS; i++) {
u8 *buf = &rdbuf[i * tplen + offset];
/* 以第一个触摸点为例,寄存器TOUCH1_XH(地址0X03),各位描述如下:
* bit7:6 Event flag 0:按下 1:释放 2:接触 3:没有事件
* bit5:4 保留
* bit3:0 X轴触摸点的11~8位。
*/
type = buf[0] >> 6; /* 获取触摸类型 */
if (type == TOUCH_EVENT_RESERVED)
continue;
/* 我们所使用的触摸屏和FT5X06是反过来的 */
x = ((buf[2] << 8) | buf[3]) & 0x0fff;
y = ((buf[0] << 8) | buf[1]) & 0x0fff;
/* 以第一个触摸点为例,寄存器TOUCH1_YH(地址0X05),各位描述如下:
* bit7:4 Touch ID 触摸ID,表示是哪个触摸点
* bit3:0 Y轴触摸点的11~8位。
*/
id = (buf[2] >> 4) & 0x0f;
down = type != TOUCH_EVENT_UP;
//产生 ABS_MT_SLOT 事件,告诉内核当前上报的是哪个触摸点的坐标数据
input_mt_slot(multidata->input, id);
/* 给 slot 关 联 一 个 ABS_MT_TRACKING_ID ,
ABS_MT_TOOL_TYPE 事 件 指 定 触 摸 类 型 ( 是 笔 还 是 手 指 等 )
*/
input_mt_report_slot_state(multidata->input, MT_TOOL_FINGER, down);
if (!down)
continue;
//上报触摸点坐标信息
input_report_abs(multidata->input, ABS_MT_POSITION_X, x);
input_report_abs(multidata->input, ABS_MT_POSITION_Y, y);
}
input_mt_report_pointer_emulation(multidata->input, true);
//上报一个同步事件,告诉内核上报结束
input_sync(multidata->input);
fail:
return IRQ_HANDLED;
}





![ERROR 6400 --- [ main] com.zaxxer.hikari.pool.HikariPool : root - Exception](https://img-blog.csdnimg.cn/58e1284c8f7246ca8196ef6affedc2bc.png)