文章目录
- abstract
- 正弦函数
- 正弦型函数
- 转动相关概念
- 旋转角速度
- 转动周期
- 转动频率
- 初相
- 小结
- 余弦函数的图象与性质
- 性质
- 正切函数的图象和性质
- 由已知三角函数值求角
- 任意角范围内
- 反三角函数(限定范围内)
- 反正弦
- 反余弦
- 反正切
abstract
- 讨论
sin
,
cos
,
tan
\sin,\cos,\tan
sin,cos,tan的图象性质,这些性质可以借助单位圆分析
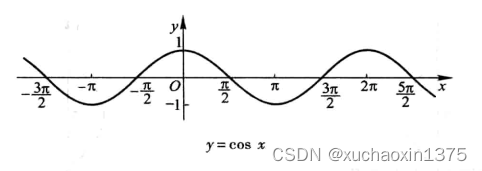
- y = cos x y=\cos{x} y=cosx:余弦曲线
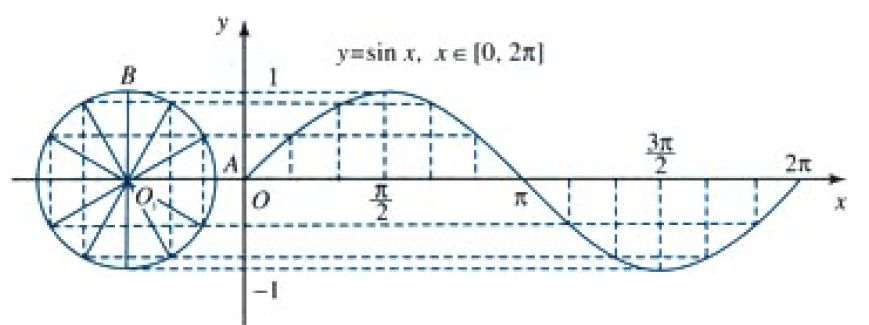
- y = sin x y=\sin{x} y=sinx:正弦曲线
- y = tan x y=\tan{x} y=tanx:正切曲线
 | 正弦线和正弦曲线 |
|---|---|
 | 余弦曲线 |
 | 正切线和正切曲线 |
正弦函数
-
y
=
sin
x
y=\sin{x}
y=sinx,
x
∈
R
x\in\mathbb{R}
x∈R是正弦函数,其中自变量
x
x
x是弧度值
- 定义域: R \mathbb{R} R
- 值域:
[
−
1
,
1
]
[-1,1]
[−1,1]
- 当 x = − π 2 + 2 k π x=-\frac{\pi}{2}+2k\pi x=−2π+2kπ, k ∈ Z k\in\mathbb{Z} k∈Z时取得最小值 − 1 -1 −1
- 当 x = π 2 + 2 k π x=\frac{\pi}{2}+2k\pi x=2π+2kπ, k ∈ Z k\in\mathbb{Z} k∈Z时取得最大值1
- 有界性: ∣ sin x ∣ ⩽ 1 |\sin{x}|\leqslant{1} ∣sinx∣⩽1
- 奇偶性:奇函数
- 周期性:最小正周期为 2 π 2\pi 2π
- 单调性: [ − π 2 + 2 k π , π 2 + 2 k π ] [-\frac{\pi}{2}+2k\pi,\frac{\pi}{2}+2k\pi] [−2π+2kπ,2π+2kπ]为递增区间; [ π 2 + 2 k π , 3 π 2 + 2 k π ] [\frac{\pi}{2}+2k\pi,\frac{3\pi}{2}+2k\pi] [2π+2kπ,23π+2kπ]为递减区间; k ∈ Z k\in\mathbb{Z} k∈Z
- 正弦函数刻画的是弧度 x x x对应的正弦值 sin x \sin{x} sinx
正弦型函数
- y = A sin ( ω x + ϕ ) y=A\sin(\omega{x}+\phi) y=Asin(ωx+ϕ),称为正弦型函数
- 相比于正弦函数 y = sin x y=\sin{x} y=sinx, y = A sin ( ω x + ϕ ) y=A\sin(\omega{x}+\phi) y=Asin(ωx+ϕ)增加了两个影响函数的参数 A , ω , ϕ A,\omega,\phi A,ω,ϕ(它们不是变量,而都是常数)
- 这个函数在物理应用中很常见,具有明显的物理意义
- 正弦型函数和仍可以用圆周运动来描述:
- 设直角坐标系中某点 P ( x , y ) P(x,y) P(x,y)绕着原点 O O O以半径为 R R R的圆轨迹作角速度为 ω \omega ω rad/s的圆周运动
- 设旋转前 P P P的位置为 P 0 P_0 P0,且 O P OP OP是 ϕ \phi ϕ的终边
- 经过 t t t秒后,点 P P P来到了新位置,且 O P OP OP是 ϕ + ω t \phi+\omega{t} ϕ+ωt的终边
- 容易算得
P
P
P的坐标
(
x
,
y
)
(x,y)
(x,y)关于时间
t
t
t的函数关系
- x = R cos ( ω t + ϕ ) x=R\cos(\omega{t}+\phi) x=Rcos(ωt+ϕ)
- y = R sin ( ω t + ϕ ) y=R\sin(\omega{t}+\phi) y=Rsin(ωt+ϕ)
- 推导方式如下:
- 在直角坐标系 x O y xOy xOy上,令角 ϕ \phi ϕ的顶点为 O O O坐标原点重合, ϕ \phi ϕ的始边与 x x x轴正半轴重合
- 并以 O O O为圆心构造单位圆, ϕ \phi ϕ与单位圆的交点的坐标为 E ( cos ϕ , sin ϕ ) E(\cos\phi,\sin{\phi}) E(cosϕ,sinϕ)
- 而 P 0 P_0 P0也是 ϕ \phi ϕ终边上的点,且 O P 0 = R OP_0=R OP0=R;则 P 0 P_0 P0的坐标 ( P 0 x , P 0 y ) (P_{0x},P_{0y}) (P0x,P0y)是 E E E的坐标 ( sin α , cos α ) (\sin\alpha,\cos\alpha) (sinα,cosα)的 R R R倍: P 0 x = R cos ϕ P_{0x}=R\cos\phi P0x=Rcosϕ, P 0 y = R sin ϕ P_{0y}=R\sin\phi P0y=Rsinϕ
- 对于终边 ω t + ϕ \omega{t}+\phi ωt+ϕ上的 P P P点坐标为 ( R cos ( ω t + ϕ ) , R sin ( ω t + ϕ ) ) (R\cos(\omega{t}+\phi),R\sin(\omega{t}+\phi)) (Rcos(ωt+ϕ),Rsin(ωt+ϕ))
- 这就得到了正弦型函数 y = A sin ( ω x + ϕ ) y=A\sin(\omega{x}+\phi) y=Asin(ωx+ϕ)
转动相关概念
旋转角速度
- 坐标系内的点 P ( x , y ) P(x,y) P(x,y)绕点 O O O在单位时间内旋转过的角的弧度数 ω \omega ω
转动周期
-
y = R sin ( ω t + ϕ ) y=R\sin(\omega{t}+\phi) y=Rsin(ωt+ϕ)中,点 P P P旋转一周所需要的时间为 T = 2 π ω T=\frac{2\pi}{\omega} T=ω2π,这个时间也称为转动周期
- 令 α = ω t + ϕ \alpha=\omega{t}+\phi α=ωt+ϕ,设函数 y y y的最小正周期为 T 0 T_0 T0,则 y ( t + T 0 ) y(t+T_0) y(t+T0)= y ( t ) y(t) y(t)
- 即 R sin ( ω ( t + T 0 ) + ϕ ) R\sin(\omega{(t+T_0)}+\phi) Rsin(ω(t+T0)+ϕ)= R sin ( ω t + ϕ ) R\sin(\omega{t}+\phi) Rsin(ωt+ϕ),即 sin ( ( ω t + ϕ ) + ω T 0 ) \sin((\omega{t}+\phi)+\omega T_0) sin((ωt+ϕ)+ωT0)= sin ( ω t + ϕ ) \sin(\omega{t}+\phi) sin(ωt+ϕ)
- 所以 sin ( α + T 0 ) = sin ( α ) \sin(\alpha+T_0)=\sin(\alpha) sin(α+T0)=sin(α)
- sin α \sin\alpha sinα的周期为 2 π 2\pi 2π,那么 ω T 0 \omega{T_0} ωT0= 2 π 2\pi 2π,所以 T 0 = 2 π ω T_{0}=\frac{2\pi}{\omega} T0=ω2π
-
此外,还可以从坐标的伸缩角度来得到转动周期计算公式
-
例: sin ( k x ) \sin(kx) sin(kx), k = 1 , 2 , 3 , ⋯ , n k=1,2,3,\cdots,n k=1,2,3,⋯,n时,在 [ 0 , 2 π ] [0,2\pi] [0,2π]内取得最大值1的极值点(满足 k x = π 2 kx=\frac{\pi}{2} kx=2π)分别是: π 2 \frac{\pi}{2} 2π, π 4 \frac{\pi}{4} 4π, π 6 \frac{\pi}{6} 6π, ⋯ \cdots ⋯, π 2 n \frac{\pi}{2n} 2nπ
转动频率
- 一秒内,点 P P P旋转的周数 f = 1 T f=\frac{1}{T} f=T1= ω 2 π \frac{\omega}{2\pi} 2πω,称为转动的频率
初相
- 角 ϕ \phi ϕ也叫做初相
小结
- 转动周期(转动频率)只和 ω \omega ω相关,而与 ϕ \phi ϕ无关
- ω \omega ω越大,在一定区间内曲线波动的次数就越多,反之越少
余弦函数的图象与性质
- 我们可以通过诱导公式 y = sin ( π 2 + x ) y=\sin(\frac{\pi}{2}+x) y=sin(2π+x)= cos x \cos{x} cosx得知, y = cos x y=\cos{x} y=cosx的图象和 sin ( π 2 + x ) \sin(\frac{\pi}{2}+x) sin(2π+x)的图象相同
- 所以可以通过研究正弦型函数来研究余弦函数(正弦函数向左平移2个单位就可以得到余弦函数的图象)
- 此外,余弦型函数 y = A cos ( ω x + ϕ ) y=A\cos(\omega{x}+\phi) y=Acos(ωx+ϕ)可以转换为 y = A sin ( ω x + ϕ + π 2 ) y=A\sin(\omega{x}+\phi+\frac{\pi}{2}) y=Asin(ωx+ϕ+2π)
性质
- 定义域和值域和周期同正弦函数
- 当且仅当 x = π + 2 k π x=\pi+2k\pi x=π+2kπ, k ∈ Z k\in\mathbb{Z} k∈Z时,取得最小值 − 1 -1 −1
- 当且仅当 x = 2 k π x=2k\pi x=2kπ, k ∈ Z k\in\mathbb{Z} k∈Z时,余弦函数取值得最大值1
- 奇偶性:偶函数
- 单调性: [ 2 k π , π + 2 k π ] [2k\pi,\pi+2k\pi] [2kπ,π+2kπ], k ∈ Z k\in\mathbb{Z} k∈Z时函数单调递减; [ π + 2 k π , 2 π + 2 k π ] [\pi+2k\pi,2\pi+2k\pi] [π+2kπ,2π+2kπ], k ∈ Z k\in\mathbb{Z} k∈Z函数单调递增
正切函数的图象和性质
- 定义域: { x ∣ x ≠ k π + π 2 , k ∈ Z } \set{x|x\neq{k\pi+\frac{\pi}{2}},k\in\mathbb{Z}} {x∣x=kπ+2π,k∈Z},
- 值域:
R
\mathbb{R}
R
- 在区间 ( − π 2 , π 2 ) (-\frac{\pi}{2},\frac{\pi}{2}) (−2π,2π)内,当 x < π 2 x<\frac{\pi}{2} x<2π且无限接近 π 2 \frac{\pi}{2} 2π时, tan x \tan{x} tanx趋于无限大,记为 tan x → + ∞ \tan{x}\to{+\infin} tanx→+∞
- 另一侧有 x → − π 2 x\to{-\frac{\pi}{2}} x→−2π时 tan x → − ∞ \tan{x}\to{-\infin} tanx→−∞
- 周期:
π
\pi
π
- 由 tan ( π + x ) \tan(\pi+x) tan(π+x)= tan x \tan{x} tanx,所以 π \pi π是 tan x \tan{x} tanx的一个周期
- 并且结合单位圆中的正弦线,容易说明最小正周期为 π \pi π
- 奇偶性:奇函数
- 单调性: ( − π 2 + k π , π 2 + k π ) (-\frac{\pi}{2}+k\pi,\frac{\pi}{2}+k\pi) (−2π+kπ,2π+kπ), k ∈ Z k\in\mathbb{Z} k∈Z区间内函数单调增加
由已知三角函数值求角
任意角范围内
- 通常可以用单位圆来求解具有给定三角函数值对应的弧度角
- 例如:已知
sin
x
=
2
2
\sin{x}=\frac{\sqrt{2}}{2}
sinx=22,求
- x x x的可能取值
- x ∈ [ − π 2 , π 2 ] x\in[-\frac{\pi}{2},\frac{\pi}{2}] x∈[−2π,2π]条件下 x x x的取值
- 解:
- 由单位圆可知,
π
4
+
2
k
π
\frac{\pi}{4}+2k\pi
4π+2kπ,
(
π
−
π
4
)
+
2
k
π
(\pi-\frac{\pi}{4})+2k\pi
(π−4π)+2kπ,
(
k
∈
Z
)
(k\in\mathbb{Z})
(k∈Z)都满足
sin
x
=
2
2
\sin{x}=\frac{\sqrt{2}}{2}
sinx=22,
- 用集合表示为: { x ∣ x = 2 k π + π 4 ( k ∈ Z ) } \set{x|x=2k\pi+\frac{\pi}{4}(k\in{\mathbb{Z}})} {x∣x=2kπ+4π(k∈Z)} ⋃ \bigcup ⋃ { x ∣ x = 2 k π + 3 π 4 ( k ∈ Z ) } \set{x|x=2k\pi+\frac{3\pi}{4}(k\in\mathbb{Z})} {x∣x=2kπ+43π(k∈Z)}
- 若 x ∈ [ − π 2 , π 2 ] x\in[-\frac{\pi}{2},\frac{\pi}{2}] x∈[−2π,2π],由单位圆可知, x = π 4 x=\frac{\pi}{4} x=4π
- 由单位圆可知,
π
4
+
2
k
π
\frac{\pi}{4}+2k\pi
4π+2kπ,
(
π
−
π
4
)
+
2
k
π
(\pi-\frac{\pi}{4})+2k\pi
(π−4π)+2kπ,
(
k
∈
Z
)
(k\in\mathbb{Z})
(k∈Z)都满足
sin
x
=
2
2
\sin{x}=\frac{\sqrt{2}}{2}
sinx=22,
反三角函数(限定范围内)
- 已知三角函数值求角的过程的所建立的函数称为反三角函数
- 由于单射函数才有反函数,反三角函数根据限定三角函数内的一段单调区间定义出来
反正弦
- 一般地,对于正弦函数 y = sin x y=\sin{x} y=sinx,若已知函数值为 y ( y ∈ [ − 1 , 1 ] ) y(y\in[-1,1]) y(y∈[−1,1]),那么 [ − π 2 , π 2 ] [-\frac{\pi}{2},\frac{\pi}{2}] [−2π,2π]上由唯一的 x x x值和它对应,记为 x = arcsin y x=\arcsin{y} x=arcsiny,(其中 − 1 ⩽ y ⩽ 1 -1\leqslant{y}\leqslant{1} −1⩽y⩽1, − π 2 ⩽ x ⩽ π 2 -\frac{\pi}{2}\leqslant{x}\leqslant{\frac{\pi}{2}} −2π⩽x⩽2π)
- 例如: sin x = 1 2 \sin{x}=\frac{1}{2} sinx=21, x ∈ [ − π 2 , π 2 ] x\in[-\frac{\pi}{2},\frac{\pi}{2}] x∈[−2π,2π],求 x x x的问题可以表示为 arcsin 1 2 \arcsin{\frac{1}{2}} arcsin21
反余弦
- 在区间 [ 0 , π ] [0,\pi] [0,π]上符合条件 cos x = y \cos{x}=y cosx=y, ( y ∈ [ − 1 , 1 ] ) (y\in[-1,1]) (y∈[−1,1])的求角 x x x,记为 x = arccos y x=\arccos{y} x=arccosy
- 例
- arccos 1 2 = π 3 \arccos{\frac{1}{2}}=\frac{\pi}{3} arccos21=3π
- 已知
cos
x
=
−
2
2
\cos{x}=-\frac{\sqrt{2}}{2}
cosx=−22,且
x
∈
[
0
,
2
π
]
x\in[0,2\pi]
x∈[0,2π],求
x
x
x的取值集合
- 由单位圆可知,解集为 { 3 π 4 , 5 π 4 } \set{\frac{3\pi}{4},\frac{5\pi}{4}} {43π,45π}
- 用反余弦函数表示: { arccos ( − 2 2 ) , π + arccos 2 2 } \set{\arccos{(-\frac{\sqrt{2}}{2})},\pi+\arccos\frac{\sqrt{2}}{2}} {arccos(−22),π+arccos22}
反正切
- 一般地,若 tan x = y ( y ∈ R ) \tan{x}=y(y\in\mathbb{R}) tanx=y(y∈R),且 x ∈ ( − π 2 , π 2 ) x\in(-\frac{\pi}{2},\frac{\pi}{2}) x∈(−2π,2π),那么对每一个正切值 y y y,在开区间 ( − π 2 , π 2 ) (-\frac{\pi}{2},\frac{\pi}{2}) (−2π,2π)内,有且只有一个角 x x x满足 tan x = y \tan{x}=y tanx=y,记为 x = arctan y x=\arctan{y} x=arctany, x ∈ ( − π 2 , π 2 ) x\in(-\frac{\pi}{2},\frac{\pi}{2}) x∈(−2π,2π)
- 例如 arctan 3 3 \arctan{\frac{\sqrt{3}}{3}} arctan33= π 6 \frac{\pi}{6} 6π