说明
本文的目的是了解如何在 ROS2 中创建库,以供其他 ROS2 包使用。除此之外,本文还介绍了如何使用 catch2 框架编写单元测试。本文的第 1 部分将详细介绍如何创建库包。第 2 部分将介绍 ROS2 软件包如何利用创建的库
上篇 ROS2 库包设置和使用 Catch2 进行单元测试
一、项目结构大纲
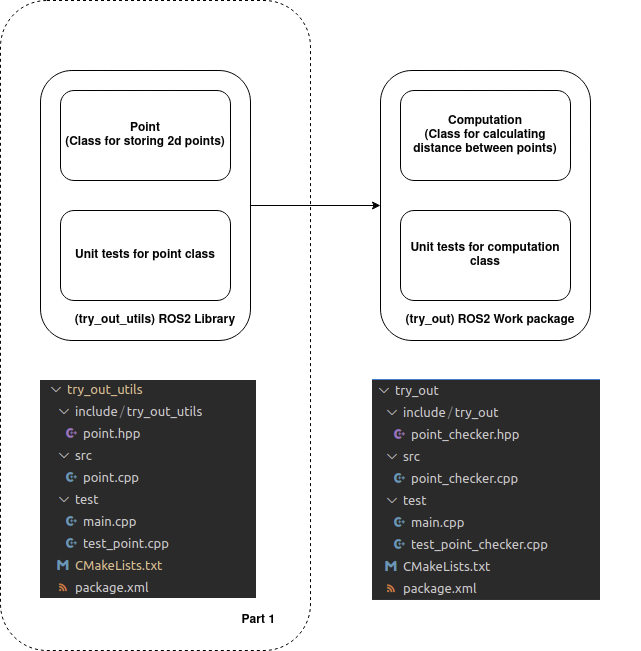
库的流程
- 在包含/点下为 2d 点创建标题.hpp
- 在 src/point 下为 2d 点添加实现类.cpp
- 为测试下的测试类/主类创建入口点.cpp
- 在测试/test_point.cpp下添加单元测试
- 在 cmake/try_out_utils-config.cmake.in 下为 cmake 添加命名空间配置
- 在根项目目录下创建 CMakeLists.txt (此处指定了 lib 的配置)
- 在根项目目录下创建包.xml
二、程序代码实现
2.1 为 2d 点创建标题.hpp
// include/try_out_utils/point.hpp
#ifndef TRY_OUT_UTILS__POINT_HPP_
#define TRY_OUT_UTILS__POINT_HPP_
namespace try_out_utils
{
class Point
{
private:
double x_;
double y_;
public:
Point(double x, double y);
double get_x();
double get_y();
};
} // namespace try_out_utils
#endif // TRY_OUT_UTILS__POINT_HPP_2.2 为 2d 点添加实现类.cpp
具有两个私有变量 x 和 y 的标头类,用于表示 2d 中的点及其 getter 和 setter 方法
// src/point.cpp
#include <try_out_utils/point.hpp>
Point::Point(double x, double y)
{
this->x_ = x;
this->y_ = y;
}
double Point::get_x()
{
return this->x_;
}
double Point::get_y()
{
return this->y_;
}之前在标头类中声明的 2d 点的实现类
// test/main.cpp
#define CATCH_CONFIG_MAIN
#include <catch2/catch.hpp>测试用例的 Catch2 入口点
// test/test_point.cpp
#include <catch2/catch.hpp>
#include <try_out_utils/point.hpp>
TEST_CASE("Test for point", "[]")
{
SECTION("Test for point with object creation")
{
Point p(11, 10);
REQUIRE(p.get_x() == 11);
REQUIRE(p.get_y() == 10);
}
}对点类进行单元测试以创建新的点对象
@PACKAGE_INIT@
get_filename_component(try_out_utils_CMAKE_DIR "${CMAKE_CURRENT_LIST_FILE}" PATH)
include(CMakeFindDependencyMacro)
if(NOT TARGET try_out_utils::try_out_utils)
include("${try_out_utils_CMAKE_DIR}/try_out_utils-targets.cmake")
endif()
check_required_components(try_out_utils)三、编译文件CMake
Cmake 配置别名,以便外部包可以引用该库作为 try_out_utils::try_out_utils
# setting up cmake minimum version and project name
cmake_minimum_required(VERSION 3.8)
project(try_out_utils VERSION 0.1.0)
# setting c++ version standard to 17
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 17)
endif()
# adding compiler arguments
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# added to use install directory variables
include(GNUInstallDirs)
# adding external dependencies required
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(ament_cmake_catch2 REQUIRED)
find_package(Catch2 REQUIRED)
# creating library package with reference to required files
add_library(${PROJECT_NAME} SHARED
src/point.cpp
)
# including external directories reference for the created library
target_include_directories(try_out_utils PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:${CMAKE_INSTALL_INCLUDEDIR}>
)
# helpers functions for creating config files that can be included by other projects to find and use a package
include(CMakePackageConfigHelpers)
set(INSTALL_CONFIG_DIR "${CMAKE_INSTALL_LIBDIR}/${PROJECT_NAME}/cmake")
set(PACKAGE_CONFIG_VERSION_FILE "${CMAKE_CURRENT_BINARY_DIR}/${PROJECT_NAME}-config-version.cmake")
set(PACKAGE_CONFIG_FILE "${CMAKE_CURRENT_BINARY_DIR}/${PROJECT_NAME}-config.cmake")
# creating version configuration for external package to perform compatibility check
configure_package_config_file(
"${CMAKE_CURRENT_LIST_DIR}/cmake/${PROJECT_NAME}-config.cmake.in"
${PACKAGE_CONFIG_FILE}
INSTALL_DESTINATION ${INSTALL_CONFIG_DIR}
)
# creating version configuration for external package to perform compatibility check
write_basic_package_version_file(
${PACKAGE_CONFIG_VERSION_FILE}
COMPATIBILITY ExactVersion
)
# installing library files
install(
TARGETS try_out_utils
EXPORT try_out_utils-targets
DESTINATION lib
)
# installing all reference header files
install(
DIRECTORY include/try_out_utils
DESTINATION include/
)
# installing cmake config files for try_out_utils
install(
FILES
${PACKAGE_CONFIG_VERSION_FILE}
${PACKAGE_CONFIG_FILE}
DESTINATION ${INSTALL_CONFIG_DIR}
)
# installing cmake config files for try_out_utils-targets
install(
EXPORT try_out_utils-targets
FILE try_out_utils-targets.cmake
NAMESPACE try_out_utils::
DESTINATION ${INSTALL_CONFIG_DIR}
)
# exporting the try_out_utils-target cmake config to build folder
export(
EXPORT try_out_utils-targets
FILE ${CMAKE_CURRENT_BINARY_DIR}/try_out_utils-targets.cmake
NAMESPACE try_out_utils::
)
# checking whether build includes test
if(BUILD_TESTING)
# listing files for testing
file(GLOB_RECURSE unit_test_srcs "test/*.cpp")
# adding listed files for testing
ament_add_catch2(test_try_out_utils ${unit_test_srcs} TIMEOUT 300)
# linking libraries required to the current package for testing
target_link_libraries(
test_try_out_utils
try_out_utils
Catch2::Catch2
)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()让我们详细介绍一下上面创建的cmakelist
- include(GNUInstallDirs) — 允许使用 cmake 安装变量
- add_library — 使用指定的参照文件创建库
- target_include_directories — 要包含在目标中的内部和外部包中的目录
- include(CMakePackageConfigHelpers) — 用于创建配置文件的帮助程序函数,其他项目可以包含这些文件来查找和使用包
- configure_package_config_file — 在创建用于安装项目或库的 or 文件时,应使用代替普通命令。它通过避免已安装文件中的硬编码路径来帮助使生成的包可重定位
configure_package_config_file()configure_file()<PackageName>Config.cmake<PackageName>-config.cmakeConfig.cmake - write_basic_package_version_file — 应该用于创建版本配置文件,以便导入此库的外部包可以执行与此处提供的版本兼容性检查
- 在目标位置安装目录 — 表单将一个或多个目录的内容安装到给定目标
DIRECTORY - 在目标位置安装文件 — 表单指定为项目安装文件的规则。在指定目标中安装文件
FILES - 在目标位置安装导出 — 该窗体生成并安装一个 Make 文件,其中包含用于将目标从安装树导入到另一个项目中的代码
EXPORT - 出口 — 创建一个可能由外部项目包含的文件,以从当前项目的生成树中导入命名的目标。这在交叉编译期间非常有用,可以生成实用程序可执行文件,这些实用程序可执行文件可以在一个项目中的主机平台上运行,然后将它们导入到为目标平台编译的另一个项目中。将字符串附加到写入文件的所有目标名称前面
<filename><target>...(NAMESPACE)<namespace> - 使用导出在目标位置安装目标 — 在指定目标位置安装目标的代码段。选项将已安装的目标文件与名为
EXPORT<export-name> - ament_add_catch2 — 使用为测试提供的测试文件创建测试目标
- target_link_libraries — 将目标与指定的
库链接起来(Ament 是一个用 Cmake 编写的包装器,用于简化 colcon 构建的一些功能)
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>try_out_utils</name>
<version>0.1.0</version>
<description>Utility package for commonly used functions</description>
<maintainer email="sample@email.com">santosh balaji</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<test_depend>ament_cmake_catch2</test_depend>
<test_depend>ament_cmake_uncrustify</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>四、包依赖关系
用于指定依赖项的包文件
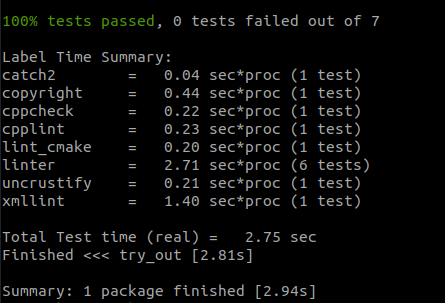
# To build created package
colcon build --packages-select try_out_utils
# To run tests on package
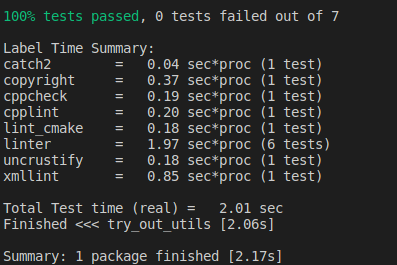
colcon test --event-handlers console_direct+ --packages-select try_out_utils运行上述命令以构建和测试库包
下篇 ROS2 库包设置和使用 Catch2 进行单元测试
五、项目结构大纲
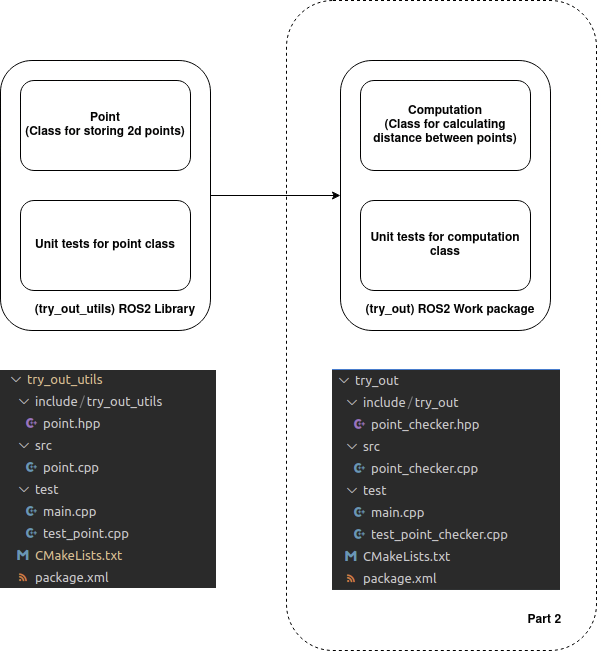
六、库的流程
- 在包含/try_out/point_checker.hpp 下为逻辑函数创建标头
- 在 src/point_checker.cpp 下为逻辑函数添加实现类
- 为测试下的测试类/主类创建入口点.cpp
- 在测试/test_point_checker.cpp下添加单元测试
- 在根项目目录下创建 CMakeLists.txt
- 在根项目目录下创建包.xml
七、程序实现
// include/try_out/point_checker.hpp
#ifndef TRY_OUT__POINT_CHECKER_HPP_
#define TRY_OUT__POINT_CHECKER_HPP_
#include <try_out_utils/point.hpp>
#include <memory>
#include <cmath>
#include <vector>
class PointChecker
{
private:
std::vector<try_out_utils::Point *> points_;
public:
void add_point(double x, double y);
std::vector<std::vector<double>> find_distance_matrix();
};
#endif // TRY_OUT__POINT_CHECKER_HPP_带有向量的标头类,用于存储点和逻辑函数
// src/point_checker.cpp
#include <try_out/point_checker.hpp>
#include <vector>
void PointChecker::add_point(double x, double y)
{
try_out_utils::Point * point = new try_out_utils::Point(x, y);
this->points_.push_back(point);
}
std::vector<std::vector<double>> PointChecker::find_distance_matrix()
{
std::vector<std::vector<double>> overall_vect;
for (unsigned int i = 0; i < this->points_.size(); i++) {
std::vector<double> inner_vect;
for (unsigned int j = 0; j < this->points_.size(); j++) {
double x_compute =
(this->points_[j]->get_x() - this->points_[i]->get_x()) *
(this->points_[j]->get_x() - this->points_[i]->get_x());
double y_compute =
(this->points_[j]->get_y() - this->points_[i]->get_y()) *
(this->points_[j]->get_y() - this->points_[i]->get_y());
double distance = std::sqrt(x_compute + y_compute);
inner_vect.push_back(distance);
}
overall_vect.push_back(inner_vect);
}
return overall_vect;
}
int main()
{
PointChecker point_checker;
point_checker.add_point(5, 5);
return 0;
}前面在标头中声明的逻辑类的实现类。此处添加了距离计算逻辑
// test/main.cpp
#define CATCH_CONFIG_MAIN
#include <catch2/catch.hpp>测试用例的 Catch2 入口点
// test/test_point_checker.cpp
#include <catch2/catch.hpp>
#include <try_out/point_checker.hpp>
#include <vector>
#include <cmath>
TEST_CASE("Test for point checker", "[]")
{
SECTION("Test for distance matrix computation"
{
PointChecker point_checker;
point_checker.add_point(1, 1);
point_checker.add_point(2, 2);
point_checker.add_point(3, 3);
std::vector<std::vector<double>> result =
point_checker.find_distance_matrix();
REQUIRE(result.size() == 3);
REQUIRE(result[0].size() == 3);
REQUIRE(result[1].size() == 3);
REQUIRE(result[2].size() == 3);
REQUIRE(result[0][0] == 0);
REQUIRE(std::round(result[0][1] - 1.4142135624) == 0);
REQUIRE(std::round(result[0][2] - 2.8284271247) == 0);
REQUIRE(std::round(result[1][2] - 1.4142135624) == 0);
REQUIRE(result[1][1] == 0);
REQUIRE(std::round(result[1][2] - 1.4142135624) == 0);
REQUIRE(std::round(result[2][0] - 2.8284271247) == 0);
REQUIRE(std::round(result[2][1] - 1.4142135624) == 0);
REQUIRE(result[2][2] == 0);
}
}点检查器类的单元测试,用于计算提供的点之间的距离
# setting up cmake minimum version and project name
cmake_minimum_required(VERSION 3.8)
project(try_out VERSION 0.1.0)
# setting c++ version standard to 17
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 17)
endif()
# adding compiler arguments
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# adding external dependencies required
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(try_out_utils REQUIRED)
find_package(ament_cmake_catch2 REQUIRED)
find_package(Catch2 REQUIRED)
# creating library package with reference to required files
add_library(try_out SHARED
src/point_checker.cpp
)
# including external directory reference for the created library
target_include_directories(try_out PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:${CMAKE_INSTALL_INCLUDEDIR}>
${rclcpp_INCLUDE_DIRS})
# including external library reference for the created library
target_link_libraries(try_out
PUBLIC
try_out_utils::try_out_utils
)
# creating executables with reference to required files
add_executable(
try src/point_checker.cpp)
# including external directory reference for the created executable
target_include_directories(try PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:${CMAKE_INSTALL_INCLUDEDIR}>
${rclcpp_INCLUDE_DIRS})
# including external library reference for the created executable
target_link_libraries(try
${rclcpp_LIBRARIES}
try_out_utils::try_out_utils
)
# installing executable file
install(TARGETS
try
DESTINATION lib})
# installing library file
install(
TARGETS try_out
DESTINATION lib
)
# installing all reference header files
install(
DIRECTORY include/try_out
DESTINATION include/
)
# checking whether build includes test
if(BUILD_TESTING)
# listing files for testing
file(GLOB_RECURSE unit_test_srcs "test/*.cpp")
# adding listed files for testing
ament_add_catch2(test_try_out ${unit_test_srcs} TIMEOUT 300)
# linking libraries required to the current package for testing
target_link_libraries(test_try_out
try_out
try_out_utils::try_out_utils
Catch2::Catch2)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()九、编译环节
让我们详细介绍一下上面创建的cmakelist
- add_library — 使用指定的参照文件创建库
- add_executable — 使用指定文件创建可执行文件
- target_include_directories — 要包含在目标中的内部和外部包中的目录。可以使用命令
- target_link_libraries — 将目标与指定的库链接
- 在目标位置安装目录 — 表单将一个或多个目录的内容安装到给定目标
DIRECTORY - 在目标位置安装目标 — 表单指定从项目安装目标的规则
TARGETS - ament_add_catch2 — 使用提供的
测试文件创建测试目标(Ament 是一个用 Cmake 编写的包装器,用于简化 colcon 构建的一些功能)
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>try_out</name>
<version>0.1.0</version>
<description>Work package which utilizes the created library package</description>
<maintainer email="santechselva@gmail.com">santosh balaji</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>try_out_utils</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<test_depend>ament_cmake_catch2</test_depend>
<test_depend>ament_cmake_uncrustify</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>十、单元测试实现
用于指定依赖项的包文件
# To build created package
colcon build --packages-select try_out
# To run tests on package
colcon test --event-handlers console_direct+ --packages-select try_out运行上述命令以构建和测试库包
参考资料
GitHub - open-rmf/rmf_utils: Internal utilities for RMF libraries (Robotics middleware framework utilities)
GitHub - open-rmf/rmf_traffic: Traffic management libraries for RMF (Traffic management framework which uses the utility library)
CMake Reference Documentation — CMake 3.27.6 Documentation (Cmake documentation)
ament_cmake user documentation — ROS 2 Documentation: Foxy documentation (Enhanced version of Cmake for ROS2 packages)
Source code
GitHub - santoshbalaji/ros2-library-package-medium: Repository which has package used for ROS2 based work package tutorial




![[题]欧拉函数 #欧拉函数](https://img-blog.csdnimg.cn/d7aa7888ca784610923212130c44d20c.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_Q1NETiBAWS5ZTA==,size_38,color_FFFFFF,t_70,g_se,x_16)