一、WiFi主从模块设置
1. 实验器材
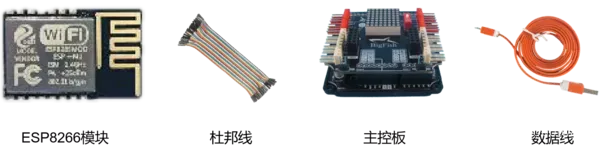
2. 实验步骤
① 给控制板刷一套空的程序。

② 将Esp8266模块连接到Bigfish扩展板上,并将扩展板插到控制板上。

③ 在arduino的Seiral Monitor中,输入AT指令集,观察模块的相应应答。
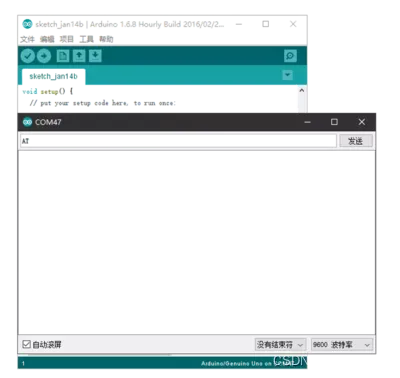
3. 常用指令
① 基础AT指令。

② WiFi功能AT指令。

③ TCP/IP 工具箱 AT 命令。

二、WiFi定位
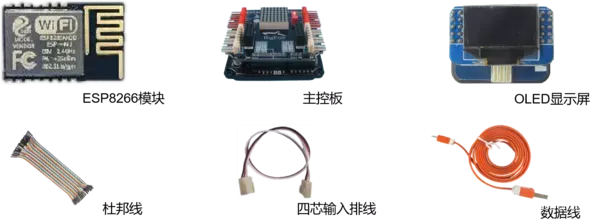
1. 实验器材
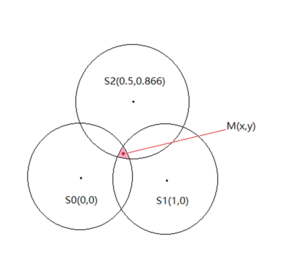
2. 定位算法
Rssi三点定位算法。
3. 实验操作
① 使用文末资料中的“ESP8266调试工具”将三个模块设置为AP模式,并记录其NAME,用于存储在程序中,按照下面方法连接ESP8266模块和Basra主控板。
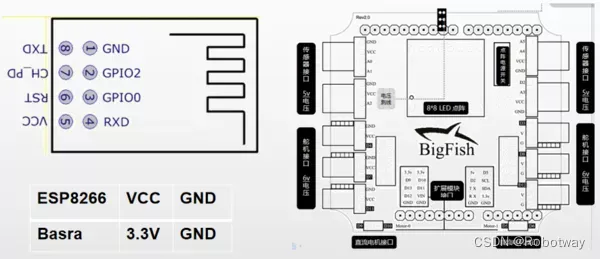
② 使用“ESP8266调试工具”将与主控板连接的WiFi模块设置为Statino模式,按照下面方法连接ESP8266模块和BigFish主控板,OLED显示屏使用四芯输入排线与BigFish进行连接。

③ 将实验例程(ESP8266RSSIPosition.ino)下载到主控板中。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-09-12 https://www.robotway.com/
------------------------------*/
/*将与主控板相连接的wifi模块使用“esp8266调试工具软件”设置为Station模式
将其余三个模块设置为AP模式,并记录其NAME,存储在程序中*/
//#define DEBUG
#define ESP_AP_NUMBER 3
#include <SoftwareSerial.h>
#include <RssiPositionComputer.h>
#include <Wire.h>
#include <MultiLCD.h>
SoftwareSerial myESP(2,3);
RssiPositionComputer myPositionComputer;
Point2D master_point;
LCD_SSD1306 lcd;
char esp_ap_name[ESP_AP_NUMBER][10] = {"ESP826601","ESP826602","ESP826603"};
int rssi[ESP_AP_NUMBER];
float distance[ESP_AP_NUMBER];
void setup()
{
delay(1000);
Serial.begin(115200);
myESP.begin(9600);
#ifdef DEBUG
Serial.println("begin");
#endif
while(myESP.available()&&myESP.read());
while(!myESP.available())
{
myESP.println("AT");
delay(1000);
}
while(myESP.available()&&myESP.read());
#ifdef DEBUG
Serial.println("Resonse ok");
#endif
lcd.begin();
lcd.clear();
lcd.setCursor(30,4);
lcd.print("Hello, world!");
}
void loop()
{
int n = searchESPAP(esp_ap_name,rssi);
for(int i=0;i<ESP_AP_NUMBER;i++)
{
distance[i] = rssiToDistance(rssi[i]);
Serial.print(distance[i]);
Serial.print('\t');
}
Serial.print(n);
Serial.print('\t');
if(myPositionComputer.distanceToPoint(distance[0],distance[1],distance[2],&master_point)==true)
{
Serial.print(master_point.x);
Serial.print('\t');
Serial.print(master_point.y);
Serial.print('\t');
Serial.println("position okok");
lcd.clear();
lcd.setCursor(30,2);
lcd.printLong(master_point.x*100,FONT_SIZE_LARGE); //按厘米输出
lcd.setCursor(30,5);
lcd.printLong(master_point.y*100,FONT_SIZE_LARGE);
}
else
{
lcd.clear();
lcd.setCursor(30,4);
lcd.print("position ERROR!");
Serial.println("position ERROR");
}
}
int nameToNumber(char in[],char name[][10])
{
for(int i=0;i<3;i++)
{
for(int j=0;j<9;j++)
{
if(in[j] != name[i][j])
break;
if(j==8)
return(i);
}
}
return(-1);
}
byte searchESPAP(char name[][10], int rs[])
{
byte search_result_number = 0;
int state = 0;
int n;
int ap_n;
char name_string[10];
char rssi_string[4];
while(myESP.available()&&myESP.read());
myESP.println("AT+CWLAP");
delay(100);
while(myESP.available()&&myESP.read());
unsigned long t = millis();
while(!myESP.available())
{
if(millis()-t<3000)
delay(5);
else
return(0);
}
#ifdef DEBUG
Serial.println("received........");
#endif
t = millis();
while(myESP.available()||(millis()-t<3000))
{
if(!myESP.available())
continue;
char in_char = myESP.read();
#ifdef DEBUG
Serial.print(in_char);
#endif
if( (state == 0)&&(in_char=='(') )
{
state = 1;
n = -4;
}
else if(state == 1)
{
n++;
if(n>=0)
name_string[n] = in_char;
if(n == 8)
{
n = -3;
ap_n = nameToNumber(name_string,name);
if(ap_n != -1)
{
state = 2;
#ifdef DEBUG
Serial.print('\n');
Serial.print("ap_n:");Serial.println(ap_n);
#endif
}
else
{
state = 0;
}
}
}
else if(state==2)
{
n++;
if(n>=0)
rssi_string[n] = in_char;
if(n == 2)
{
rs[ap_n] = atof(rssi_string);
state = 0;
search_result_number++;
#ifdef DEBUG
Serial.print('\n');
Serial.print("rssi["+String(ap_n)+"]:");Serial.println(rs[ap_n]);
#endif
}
}
}
return(search_result_number);
}
float rssiToDistance(int rssi)
{
float dis = 0;
dis = pow(10.0,((abs(rssi)-47)/10.0/2.212));
return dis;
}④ 将不同模块按照三点定位摆放开(在1m×1m的空间内),如下图所示,观察实验效果。


程序源代码、ESP8266调试工具、ESP8266相关学习资料详见 如何用WiFi实现无线定位