一、RTC振荡器
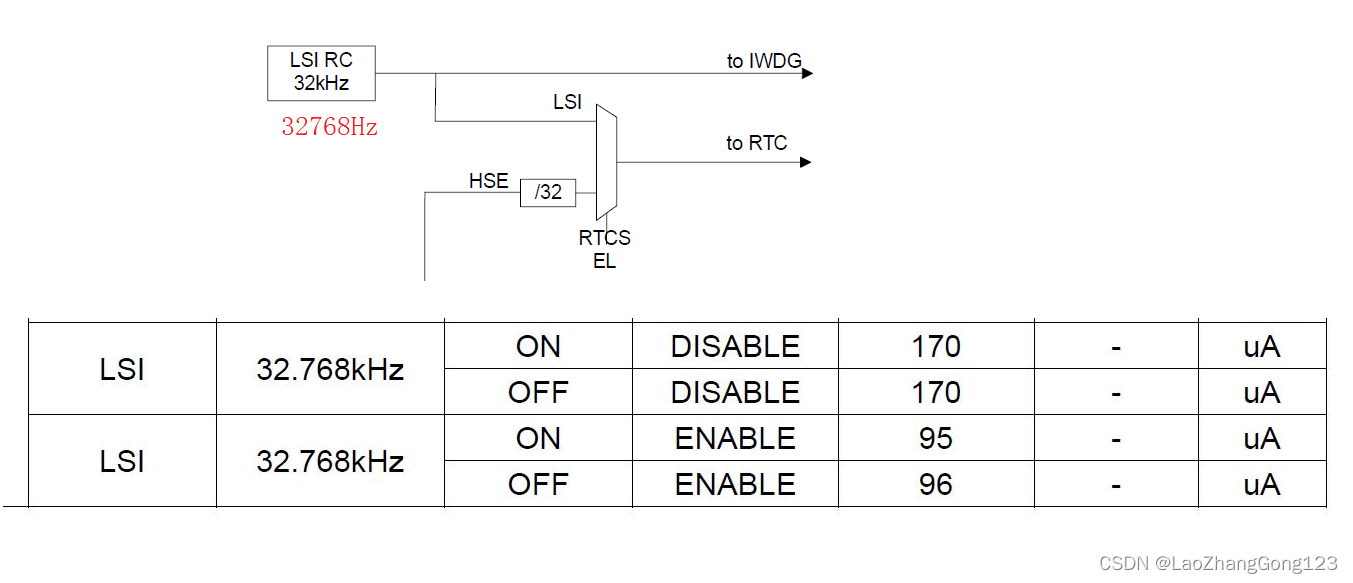
PY32F003F18实时时钟的振荡器是内部RC振荡器,频率为32.768KHz。它也可以使用HSE时钟,不建议使用。HAL库提到LSE振荡器,但PY32F003F18实际上没有这个振荡器。
缺点:CPU掉电后,需要重新配置RTC,这个确实不太友好,有点像是鸡肋,在要求不严格的场合,凑合使用吧。
RTC时钟框图如下:
二、RTC的HAL库有一个不是很严重的bug
PY32F003F18的HAL库润年函数中有一个BUG,不是很严重,因为2400年是一个闰年,它把年定义为字节型变量,是没有办法分辨出是不是闰年。
闰年的计算方法:年数能被4整除,但不能被100年整除,为闰年;若年数能400年整除,也为闰年。
HAL库确实不大好,它喜欢用全局变量来实现其功能,让人受不了。我改了,让它适合自己需要的。HAL处的好处,就是我们可以从中抠出自己需要的部分,修修改改,就可以了,比HAL库的灵活多了。时刻不忘黑它一把,因为人云亦云的人太多了。
三、非完全HAL库测试程序
如果你觉得HAL库,就用HAL中的程序,也是可以的。
#include "RTC.h"
#include "LED.h"
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
uint8_t Century;//世纪,21世纪用20表示
RTC_DateTypeDef RTC_DateStructureure;//用来保存读到的"年月日"
RTC_TimeTypeDef RTC_TimeStructureure;//用来保存读到的"时分秒"
RTC_AlarmTypeDef RTC_AlarmStructureure;
void RTC_Init(void);
void RTC_Display(void);
//函数功能:读"RTC计数寄存器"
uint32_t Read_RTC_Time_Counter(void)
{
uint16_t high1 = 0U, high2 = 0U, low = 0U;
uint32_t timecounter = 0U;
high1 = READ_REG(RTC->CNTH & RTC_CNTH_RTC_CNT);//读"RTC计数寄存器高位RTC_CNTH"
low = READ_REG(RTC->CNTL & RTC_CNTL_RTC_CNT);//读"RTC计数寄存器低位RTC_CNTL"
high2 = READ_REG(RTC->CNTH & RTC_CNTH_RTC_CNT);//读"RTC计数寄存器高位RTC_CNTH"
if (high1 != high2)
{//读"RTC计数寄存器低位RTC_CNTL"时,发现"RTC计数寄存器高位RTC_CNTH"中的数据发生改变了
//In this case the counter roll over during reading of CNTL and CNTH registers,
//read again CNTL register then return the counter value
timecounter = (((uint32_t) high2 << 16U) | READ_REG(RTC->CNTL & RTC_CNTL_RTC_CNT));
}
else
{
//No counter roll over during reading of CNTL and CNTH registers,
//counter value is equal to first value of CNTL and CNTH
timecounter = (((uint32_t) high1 << 16U) | low);
}
return timecounter;
}
//函数功能:
//等待RTC写操作结束
//返回0,表示退出RTC配置模式,开始更新RTC寄存器
HAL_StatusTypeDef Enter_RTC_Init_Mode(void)
{
uint32_t tickstart = 0U;
tickstart = HAL_GetTick();
/* Wait till RTC is in INIT state and if Time out is reached exit */
while ( (RTC->CRL & RTC_CRL_RTOFF) == (uint32_t)RESET )
{//读"RTC控制寄存器RTC_CRL"中的RTOFF,若RTOFF=0,则上一次对RTC寄存器的写操作仍在进行
if ((HAL_GetTick() - tickstart) > RTC_TIMEOUT_VALUE)
{//RTC_TIMEOUT_VALUE=2000,最大等待时间为2000ms
return HAL_TIMEOUT;
}
}
_HAL_RTC_WRITEPROTECTION_DISABLE(RTC);
//将"RTC控制寄存器RTC_CRL"中的CNF=0,退出配置模式,开始更新RTC寄存器
//Disable the write protection for RTC registers
return HAL_OK;
}
//函数功能:
//等待RTC写操作结束
//返回0,表示RTC写操作结束
HAL_StatusTypeDef Exit_RTC_Init_Mode(void)
{
uint32_t tickstart = 0U;
_HAL_RTC_WRITEPROTECTION_ENABLE(RTC);
//将"RTC控制寄存器RTC_CRL"中的CNF=1,进入RTC配置模式
tickstart = HAL_GetTick();
while ((RTC->CRL & RTC_CRL_RTOFF) == RTC_CRL_RTOFF)
{//读"RTC控制寄存器RTC_CRL"中的RTOFF,若RTOFF=1,则上一次对RTC寄存器的写操作已经完成
if ((HAL_GetTick() - tickstart) > RTC_RTOFF_RESET_TIMEOUT_VALUE)
{//RTC_RTOFF_RESET_TIMEOUT_VALUE=4,最大等待时间为4ms
break;
}
}
tickstart = HAL_GetTick();
while ((RTC->CRL & RTC_CRL_RTOFF) == (uint32_t)RESET)
{//读"RTC控制寄存器RTC_CRL"中的RTOFF,若RTOFF=0,则上一次对RTC寄存器的写操作仍在进行
if ((HAL_GetTick() - tickstart) > RTC_TIMEOUT_VALUE)
{//RTC_TIMEOUT_VALUE=2000,最大等待时间为2000ms
return HAL_TIMEOUT;
}
}
return HAL_OK;
}
//函数功能:将TimeCounter写入"RTC计数寄存器"
HAL_StatusTypeDef Write_RTC_Time_Counter( uint32_t TimeCounter )
{
HAL_StatusTypeDef status = HAL_OK;
if (Enter_RTC_Init_Mode() != HAL_OK)
{//等待RTC写操作结束
//返回0,表示退出RTC配置模式,开始更新RTC寄存器
status = HAL_ERROR;
}
else
{
WRITE_REG(RTC->CNTH, (TimeCounter >> 16U));
//写"RTC计数寄存器高位RTC_CNTH"
//Set RTC COUNTER MSB word
WRITE_REG(RTC->CNTL, (TimeCounter & RTC_CNTL_RTC_CNT));
//写"RTC计数寄存器低位RTC_CNTL"
//Set RTC COUNTER LSB word
if (Exit_RTC_Init_Mode() != HAL_OK)
{//等待RTC写操作结束
status = HAL_ERROR;
}
}
return status;
}
//函数功能:读"RTC闹钟寄存器"
uint32_t Read_RTC_Alarm_Counter(void)
{
uint16_t high1 = 0U, low = 0U;
high1 = READ_REG(RTC->ALRH & RTC_CNTH_RTC_CNT);
//读"RTC闹钟寄存器高位RTC_ALRH"
low = READ_REG(RTC->ALRL & RTC_CNTL_RTC_CNT);
//读"RTC闹钟寄存器低位RTC_ALRL"
return (((uint32_t) high1 << 16U) | low);
}
//函数功能:将AlarmCounter写入"RTC闹钟寄存器"
HAL_StatusTypeDef Write_RTC_Alarm_Counter( uint32_t AlarmCounter)
{
HAL_StatusTypeDef status = HAL_OK;
/* Set Initialization mode */
if (Enter_RTC_Init_Mode() != HAL_OK)
{//等待RTC写操作结束
//返回0,表示退出RTC配置模式,开始更新RTC寄存器
status = HAL_ERROR;
}
else
{
WRITE_REG(RTC->ALRH, (AlarmCounter >> 16U));
//写"RTC闹钟寄存器高位RTC_ALRH",Set RTC COUNTER MSB word
WRITE_REG(RTC->ALRL, (AlarmCounter & RTC_ALRL_RTC_ALR));
//写"RTC闹钟寄存器低位RTC_ALRL",Set RTC COUNTER LSB word
/* Wait for synchro */
if (Exit_RTC_Init_Mode() != HAL_OK)
{//等待RTC写操作结束
status = HAL_ERROR;
}
}
return status;
}
//函数功能:返回0表示闰年
uint8_t Is_LeapYear(uint16_t nYear)
{
uint16_t y;
y=Century;//2023年9月26日
y=y*100;//2023年9月26日
nYear=y+nYear;//2023年9月26日
if ((nYear % 4U) != 0U)
{
return 0U;
}
if ((nYear % 100U) != 0U)
{
return 1U;
}
if ((nYear % 400U) == 0U)
{
return 1U;
}
else
{
return 0U;
}
}
//函数功能;读取星期几的值
uint8_t Read_RTC_WeekDay(uint32_t nYear, uint8_t nMonth, uint8_t nDay)
{
uint32_t year = 0U, weekday = 0U;
year = 2000U + nYear;
if (nMonth < 3U)
{
/*D = { [(23 x month)/9] + day + 4 + year + [(year-1)/4] - [(year-1)/100] + [(year-1)/400] } mod 7*/
weekday = (((23U * nMonth) / 9U) + nDay + 4U + year + ((year - 1U) / 4U) - ((year - 1U) / 100U) + ((year - 1U) / 400U)) % 7U;
}
else
{
/*D = { [(23 x month)/9] + day + 4 + year + [year/4] - [year/100] + [year/400] - 2 } mod 7*/
weekday = (((23U * nMonth) / 9U) + nDay + 4U + year + (year / 4U) - (year / 100U) + (year / 400U) - 2U) % 7U;
}
return (uint8_t)weekday;
}
void Update_RTC_Date(RTC_DateTypeDef *update_RTCDate, uint32_t DayElapsed)
{
uint32_t year = 0U, month = 0U, day = 0U;
uint32_t loop = 0U;
/* Get the current year*/
year = update_RTCDate->Year;
/* Get the current month and day */
month = update_RTCDate->Month;
day = update_RTCDate->Date;
for (loop = 0U; loop < DayElapsed; loop++)
{
if ((month == 1U) || (month == 3U) || (month == 5U) || (month == 7U) || \
(month == 8U) || (month == 10U) || (month == 12U))
{
if (day < 31U)
{
day++;
}
/* Date structure member: day = 31 */
else
{
if (month != 12U)
{
month++;
day = 1U;
}
/* Date structure member: day = 31 & month =12 */
else
{
month = 1U;
day = 1U;
year++;
}
}
}
else if ((month == 4U) || (month == 6U) || (month == 9U) || (month == 11U))
{
if (day < 30U)
{
day++;
}
/* Date structure member: day = 30 */
else
{
month++;
day = 1U;
}
}
else if (month == 2U)
{
if (day < 28U)
{
day++;
}
else if (day == 28U)
{
if (Is_LeapYear(year))//不闰年
{//返回0表示闰年
day++;
}
else //闰年
{
month++;
day = 1U;
}
}
else if (day == 29U)
{
month++;
day = 1U;
}
}
}
if(year>=100)//2023年9月26日
{
Century++;
year=year-100;
}
/* Update year */
update_RTCDate->Year = year;
/* Update day and month */
update_RTCDate->Month = month;
update_RTCDate->Date = day;
/* Update day of the week */
update_RTCDate->WeekDay = Read_RTC_WeekDay(year, month, day);
//读取星期几的值
}
HAL_StatusTypeDef Read_RTC_Time(RTC_DateTypeDef *update_RTCDate, RTC_TimeTypeDef *sTime)
{
uint32_t counter_time = 0U, counter_alarm = 0U, days_elapsed = 0U, hours = 0U;
counter_time = Read_RTC_Time_Counter();//读"RTC计数寄存器",总秒数
hours = counter_time / 3600U;//计算有多少小时
sTime->Minutes = (uint8_t)((counter_time % 3600U) / 60U);//计算分钟数值
sTime->Seconds = (uint8_t)((counter_time % 3600U) % 60U);//计算秒数值
if (hours >= 24U)
{
days_elapsed = (hours / 24U);//计算"天"
sTime->Hours = (hours % 24U);//计算今天的"小时时间"
counter_alarm = Read_RTC_Alarm_Counter();
//读"RTC闹钟寄存器"
//Read Alarm counter in RTC registers
/* Calculate remaining time to reach alarm (only if set and not yet expired)*/
if ((counter_alarm != 0xFFFFFFFF) && (counter_alarm > counter_time))
{//RTC_ALARM_RESETVALUE=0xFFFFFFFFU
counter_alarm -= counter_time;//计算"距离报警时间的差值"
}
else
{
/* In case of counter_alarm < counter_time */
/* Alarm expiration already occurred but alarm not deactivated */
counter_alarm = 0xFFFFFFFF;
//RTC_ALARM_RESETVALUE=0xFFFFFFFFU
}
/* Set updated time in decreasing counter by number of days elapsed */
counter_time -= (days_elapsed * 24U * 3600U);//计算"今天的总秒数"
/* Write time counter in RTC registers */
if (Write_RTC_Time_Counter(counter_time) != HAL_OK)
{//将"今天的总秒数"counter_time写入"RTC计数寄存器"
return HAL_ERROR;
}
/* Set updated alarm to be set */
if (counter_alarm != 0xFFFFFFFF)
{//RTC_ALARM_RESETVALUE=0xFFFFFFFFU
counter_alarm += counter_time;
//报警时间 = "距离报警时间的差值" + "今天的总秒数"
if (Write_RTC_Alarm_Counter(counter_alarm) != HAL_OK)
{//将AlarmCounter写入"RTC闹钟寄存器"
return HAL_ERROR;
}
}
else
{
/* Alarm already occurred. Set it to reset values to avoid unexpected expiration */
if (Write_RTC_Alarm_Counter(counter_alarm) != HAL_OK)
{//将AlarmCounter写入"RTC闹钟寄存器"
return HAL_ERROR;
}
}
/* Update date */
Update_RTC_Date(update_RTCDate, days_elapsed);
}
else
{
sTime->Hours = hours;
}
return HAL_OK;
}
HAL_StatusTypeDef Read_RTC_Date(RTC_DateTypeDef *update_RTCDate,RTC_DateTypeDef *sDate)
{
RTC_TimeTypeDef stime = {0U};
/* Call HAL_RTC_GetTime function to update date if counter higher than 24 hours */
if (Read_RTC_Time(update_RTCDate, &stime) != HAL_OK)
{
return HAL_ERROR;
}
/* Fill the structure fields with the read parameters */
sDate->WeekDay = update_RTCDate->WeekDay;
sDate->Year = update_RTCDate->Year;
sDate->Month = update_RTCDate->Month;
sDate->Date = update_RTCDate->Date;
return HAL_OK;
}
void RTC_Init(void)
{
RTC_HandleTypeDef RTC_HandleStructureure;
RCC_OscInitTypeDef RCC_OscInit_Structureure;
RCC_PeriphCLKInitTypeDef PeriphClkInit_Structureure;
Century=20;//世纪,21世纪用20表示
RTC_HandleStructureure.Instance = RTC; //选择RTC
RTC_HandleStructureure.Init.AsynchPrediv = RTC_AUTO_1_SECOND; //RTC一秒时基自动计算
//HAL_RTC_MspInit函数开始//
RCC_OscInit_Structureure.OscillatorType = RCC_OSCILLATORTYPE_LSI;
RCC_OscInit_Structureure.LSIState = RCC_LSI_ON;
HAL_RCC_OscConfig(&RCC_OscInit_Structureure);
PeriphClkInit_Structureure.PeriphClockSelection = RCC_PERIPHCLK_RTC;
PeriphClkInit_Structureure.RTCClockSelection = RCC_RTCCLKSOURCE_LSI;
HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit_Structureure);
__HAL_RCC_RTCAPB_CLK_ENABLE();
//使能RTC APB外部设备时钟,Enable RTC peripheral Clocks
__HAL_RCC_RTC_ENABLE();//使能RTC时钟,Enable RTC Clock
HAL_NVIC_SetPriority(RTC_IRQn, 0x01, 0);
//设置RTC中断优先级为0x01,0无意义
NVIC_EnableIRQ(RTC_IRQn);//使能RTC中断
__HAL_RTC_OVERFLOW_ENABLE_IT(&RTC_HandleStructureure, RTC_IT_OW);//使能溢出中断,Overflow interrupt
__HAL_RTC_ALARM_ENABLE_IT(&RTC_HandleStructureure, RTC_IT_ALRA);//使能报警中断,Alarm interrupt
__HAL_RTC_SECOND_ENABLE_IT(&RTC_HandleStructureure, RTC_IT_SEC);//使能秒中断,Second interrupt
//HAL_RTC_MspInit函数结束//
HAL_RTC_Init(&RTC_HandleStructureure);//RTC初始化
/设置日期: 2023/9/27 星期三/
RTC_DateStructureure.Year = 23;
RTC_DateStructureure.Month =9;
RTC_DateStructureure.Date = 27;
RTC_DateStructureure.WeekDay = RTC_WEEKDAY_WEDNESDAY;
HAL_RTC_SetDate(&RTC_HandleStructureure, &RTC_DateStructureure, RTC_FORMAT_BIN);
//设置RTC日期
/设置时间: 09:00:00/
RTC_TimeStructureure.Hours = 9;
RTC_TimeStructureure.Minutes =00;
RTC_TimeStructureure.Seconds = 00;
HAL_RTC_SetTime(&RTC_HandleStructureure, &RTC_TimeStructureure, RTC_FORMAT_BIN);
//设置RTC时间
/设置RTC闹钟,时间到09:01:00产生中断/
RTC_AlarmStructureure.AlarmTime.Hours = 9;
RTC_AlarmStructureure.AlarmTime.Minutes = 1;
RTC_AlarmStructureure.AlarmTime.Seconds = 00;
HAL_RTC_SetAlarm_IT(&RTC_HandleStructureure, &RTC_AlarmStructureure, RTC_FORMAT_BIN);
}
void RTC_Display(void)
{
Read_RTC_Time(&RTC_DateStructureure,&RTC_TimeStructureure);
// Read_RTC_Date(&RTC_DateStructureure,&RTC_DateStructureure);
// RTC_HandleTypeDef RTC_HandleStructureure;
// RTC_HandleStructureure.Instance = RTC;//选择RTC
// printf("RTC_IT_SEC\r\n");
// HAL_RTC_GetTime(&RTC_HandleStructureure, &RTC_TimeStructureure, RTC_FORMAT_BIN);//读取"RTC时间"
// HAL_RTC_GetDate(&RTC_HandleStructureure, &RTC_DateStructureure, RTC_FORMAT_BIN);//读取"RTC日期"
printf("%02d%02d-%02d-%02d %02d:%02d:%02d\r\n", Century,RTC_DateStructureure.Year,RTC_DateStructureure.Month,RTC_DateStructureure.Date,RTC_TimeStructureure.Hours, RTC_TimeStructureure.Minutes, RTC_TimeStructureure.Seconds);
//显示时间格式为 : YY-MM-DD hh:mm:ss
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_SUNDAY) printf("Sunday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_MONDAY) printf("Monday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_TUESDAY) printf("Tuesday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_WEDNESDAY) printf("Wednesday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_THURSDAY) printf("Thursday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_FRIDAY) printf("Friday\r\n");
if(RTC_DateStructureure.WeekDay==RTC_WEEKDAY_SATURDAY) printf("Saturday\r\n");
}
//函数功能;RTC中断服务函数
void RTC_IRQHandler(void)
{
if (_HAL_RTC_SECOND_GET_FLAG(RTC,RTC_FLAG_SEC))
{
if (_HAL_RTC_SECOND_GET_FLAG(RTC, RTC_FLAG_OW))
{//RTC计数器溢出中断
/HAL_RTCEx_RTCEventCallback函数开始/
printf("%s","\r\nRTC Overflow!!!\r\n");
/HAL_RTCEx_RTCEventCallback函数结束/
_HAL_RTC_OVERFLOW_CLEAR_FLAG(RTC, RTC_FLAG_OW);
//清除溢出中断
}
else
{//RTC产生秒中断
/HAL_RTCEx_RTCEventCallback函数开始/
MCU_LED_Toggle();
/HAL_RTCEx_RTCEventCallback函数结束/
}
_HAL_RTC_SECOND_CLEAR_FLAG(RTC, RTC_FLAG_SEC);
}
if (_HAL_RTC_ALARM_GET_FLAG(RTC, RTC_FLAG_ALRAF) != (uint32_t)RESET)
{//RTC产生报警中断
/HAL_RTC_AlarmAEventCallback函数开始/
printf("%s","\r\nRTC Alarm!!!\r\n");
/HAL_RTC_AlarmAEventCallback函数结束/
_HAL_RTC_ALARM_CLEAR_FLAG(RTC, RTC_FLAG_ALRAF);
//Clear the Alarm interrupt pending bit
}
}#ifndef __RTC_H
#define __RTC_H
#include "py32f0xx_hal.h"
#define _HAL_RTC_SECOND_GET_FLAG(__INSTANCE__, __FLAG__) (((((__INSTANCE__)->CRL) & (__FLAG__)) != RESET)? SET : RESET)
#define _HAL_RTC_OVERFLOW_CLEAR_FLAG(__INSTANCE__, __FLAG__) ((__INSTANCE__)->CRL) = ~(__FLAG__)
#define _HAL_RTC_SECOND_CLEAR_FLAG(__INSTANCE__, __FLAG__) ((__INSTANCE__)->CRL) = ~(__FLAG__)
#define _HAL_RTC_ALARM_GET_FLAG(__INSTANCE__, __FLAG__) (((((__INSTANCE__)->CRL) & (__FLAG__)) != RESET)? SET : RESET)
#define _HAL_RTC_ALARM_CLEAR_FLAG(__INSTANCE__, __FLAG__) ((__INSTANCE__)->CRL) = ~(__FLAG__)
//#define _HAL_RTC_ALARM_ENABLE_IT(__INSTANCE__, __INTERRUPT__) SET_BIT((__INSTANCE__)->CRH, (__INTERRUPT__))
#define _HAL_RTC_WRITEPROTECTION_ENABLE(__INSTANCE__) CLEAR_BIT((__INSTANCE__)->CRL, RTC_CRL_CNF)
//将"RTC控制寄存器RTC_CRL"中的CNF=1,进入RTC配置模式
#define _HAL_RTC_WRITEPROTECTION_DISABLE(__INSTANCE__) SET_BIT((__INSTANCE__)->CRL, RTC_CRL_CNF)
//将"RTC控制寄存器RTC_CRL"中的CNF=0,退出配置模式,开始更新RTC寄存器
extern void RTC_Init(void);
extern void RTC_Display(void);
#endif /* __RTC_H */#include "py32f0xx_hal.h"
#include "SystemClock.h"
#include "delay.h"
#include "LED.h"
#include "SystemClock.h"
#include "USART2.h"
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()
#include "RTC.h"
const char CPU_Reset_REG[]="\r\nCPU reset!\r\n";
int main(void)
{
HSE_Config();
// HAL_Init();//systick初始化
delay_init();
HAL_Delay(1000);
USART2_Init(115200);
//PA0是为USART2_TX,PA1是USART2_RX
//中断优先级为0x01
//波特率为115200,数字为8位,停止位为1位,无奇偶校验,允许发送和接收数据,只允许接收中断,并使能串口
printf("%s",CPU_Reset_REG);
MCU_LED_Init();
RTC_Init();
while (1)
{
delay_ms(1000);
RTC_Display();
}
}四、误差分析

误差: 每10分钟误差6秒。1%的误差,还行。