推荐:用 NSDT编辑器 快速搭建可编程3D场景
在 3D 城市点云分析领域,存在多种方法,包括半自动和自动方法。 尽管该领域显示出巨大的潜力,但尚未就最佳检测、分割和分类方法达成共识。 为了鼓励创新,我们收集了 8个免费的LiDAR 数据集供所有人访问,旨在激发检测、分割和分类方面的新方法。你可以用 NSDT 3DConvert这个在线工具预览PCD、XYZ、PLY等格式的3D激光点云,本机无需安装任何软件:

https://3dconvert.nsdt.cloud
1、WHU-TLS 点云数据集
武汉大学空间智能研究院与慕尼黑工业大学、芬兰地理空间研究院、挪威科技大学、代尔夫特理工大学合作,发布全球最大、最多样化的TLS(地面激光扫描)点 云注册基准数据集。 这个公开的WHU-TLS基准数据集包括地铁站、高铁站、山地、森林、公园、校园、住宅区、河岸、文化遗产建筑、地下矿井、隧道等11种不同环境。 它总共包括115个扫描站、17.4亿个3D点以及相应的点云之间的真实变换矩阵。
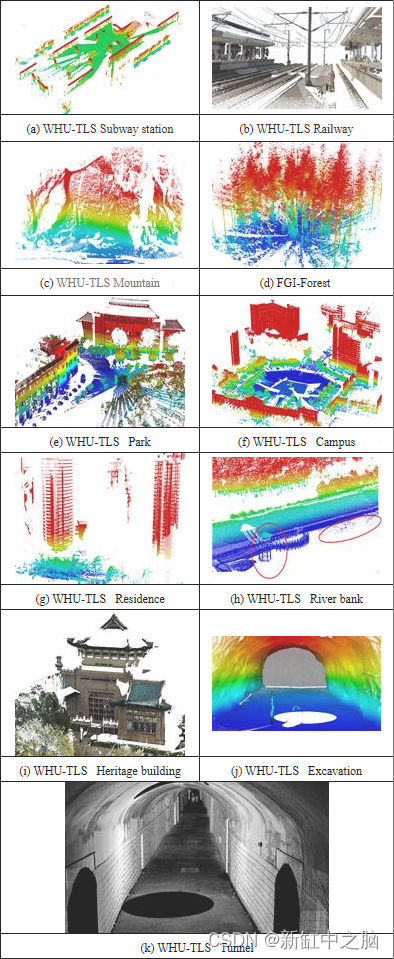
图1 WHU-TLS数据集
此外,该基准数据集还为铁路安全运营、河流测量和管理、森林结构评估、文化遗产保护、滑坡监测和地下资产管理等各种应用提供了有价值的数据。 WHU-TLS数据集以其多样化的场景和海量的数据量,为TLS数据配准算法和应用的开发和评估提供了重要的资源。
2、Oakland 3D点云数据集
Oakland 3D 点云数据集是使用 Navlab11 和侧视 LMS(激光测量系统)激光扫描仪收集的。 数据采集在宾夕法尼亚州匹兹堡奥克兰的芝加哥大学校园进行。 数据集以 ASCII 格式提供,包含 x、y 和 z 坐标以及标签置信度,每个点以单独的行和用作分隔符的空格表示。 此外,还提供了相应的 VRML 文件 (.wrl) 和标签计数文件 (.stats)。
该数据集由两个子集组成,即第 2 部分和第 3 部分,每个子集都有自己的局部参考系。 子集中的每个文件包含 100,000 个 3D 点。 为了提高数据质量,数据集经过了训练/验证和测试目的的过滤。 此外,为了便于使用和分析,原来的 44 个标签已重新映射为 5 个标签。
| 完整 | 训练 | 验证 | 测试 | |
|---|---|---|---|---|
| 统计 | 17个文件,160万个3D点,44个标签 | 1个文件,36932个3D点,5个标签 | 1个文件,91579个3D点,5个标签 | 15个文件,130万个3D点,5个标签 |
3、Paris-rue-Madame 点云数据集
Paris-rue-Madame 点云数据集来自巴黎迷人的街道,提供细致的 3D 移动激光扫描仪数据。 这个综合数据集经过手动注释增强,支持城市检测、分割和分类方法。
该数据集包含两个 PLY 文件,每个文件包含 1000 万个点。 每个文件都包含一个点列表(x、y、z、反射、标签、类)。 x、y、z 坐标对应于 Lambert 93 和海拔 IGN1969(网格 RAF09)参考坐标系中的地理参考坐标(E、N、U)。 “Reflective”参数表示激光强度,“Label”表示分割后得到的物体标签,“Class”表示物体类别。
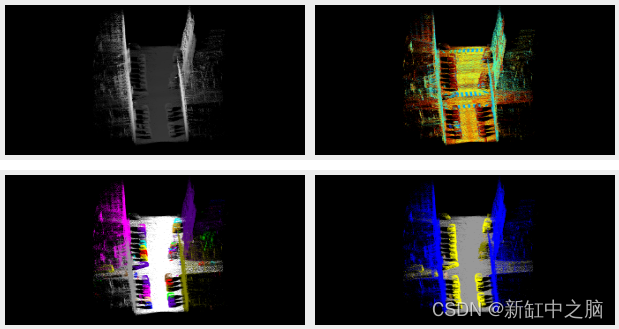
图 3. GT_Madame1_2.ply 点云的快照,按 Z 坐标值、反射率、对象标签和对象类着色。
4、IQmulus 和 TerraMobilita 点云数据集
IQmulus 和 TerraMobilita 点云数据集提供了广泛的竞赛数据集,包含 3 亿个 3D 点。 这些经过手动注释和智能分类的丰富数据是 3D 点云分析中语义理解的基石。
所有坐标均对应于 Lambert 93 和海拔 IGN1969(网格 RAF09)参考系统中的地理参考坐标(E、N、U)。 反射率代表激光强度。 已从 XY 坐标中减去偏移量以提高数据准确性。 每个文件包含以下属性:
- (float32) X、Y、Z:Lambert 93 系统中的笛卡尔地理参考坐标。
- (float32) X、Y、Z:原始坐标。
- (float32) 反射率:根据距离校正的反向散射强度。
- (uint8) Num_echo:回声数(处理多个回声)。
每个参与者提供的每个处理文件必须包含与 PLY 文件相同顺序的原始点,并具有如下两个附加属性:
- (uint32) Id:每个分段对象的唯一标识符/标签。
- (uint32) 类:使用语义类标签对每个分段对象进行分类的结果。 具有相同 ID 的点必须具有相同的类。
由于数据集中的每个点都包含一个 ID 和一个类,因此将逐点执行计算。
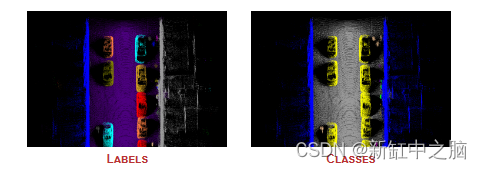
图 4.数据库中的可用类
5、哥伦比亚特区点云数据集
哥伦比亚特区点云数据集揭开了华盛顿特区的秘密,为公众提供了对分类点云数据的访问,邀请人们探索该地区的地理特征以实现不同的应用:
- 第 1 类:已处理,但未分类
- 第2类:裸土
- 第7类:低噪音
- 第九类:水
- 第10 类:忽略的土地
- 第11类:保留
- 第17类:桥面
- 第18类:高噪音
研究人员、专业人士和公众可以利用该数据集来获取与哥伦比亚特区地理特征和特征相关的见解和信息。 点云数据及其分类可用于城市规划、环境评估和基础设施管理等领域的各种地理空间分析和应用。
6、Semantic3D点云数据集
对于深度语义分割评估,Semantic3D 表现出色,包含超过 40 亿个标记点。 其动态城市场景使研究人员和从业者能够有效地对分割算法进行基准测试。
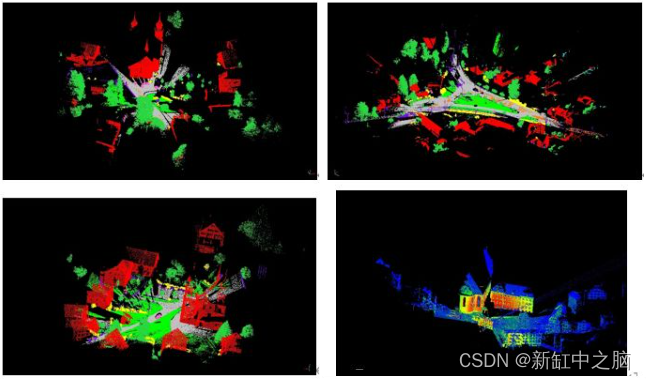
图 5.Semantic3D 点云数据集
该数据集是为了 3D 场景中的语义分割评估而创建的。 在此框架内,Semantic3D 提供以下功能:
- 包含超过 40 亿个标记点的大量点云数据集。
- 由专业评估人员手动标注的真实标签。
- 一种通用评估工具,包括已建立的跨关联指标和全面的混淆矩阵。
研究人员和从业者可以利用 Semantic3D 来评估和基准化语义分割算法在复杂多样的 3D 场景上的性能。 该数据集的大规模和高质量注释使其成为推进 3D 点云处理和语义理解领域的宝贵资源。
7、Paris-Lille-3D 点云数据集
Paris-Lille-3D 点云数据集是分类算法的细致基准,展示了巴黎和里尔的激光扫描数据。 精心手工标记 50 个类别,激发了自动化点云分析的进步。
- (float) x, y, z:点的位置。
- (float) x_origin, y_origin, z_origin:LiDAR 的位置。
- (double) GPS_time:点云获取的时间。
- (uint8) 反射率:点的反射率。
- (uint32) label:点所属的标签。
- (uint32) class:点所属的类别。
研究人员可以利用 Paris-Lille-3D 数据集来评估和比较其点云分类算法的性能。 各种类别的手工标记数据的可用性使其成为推进 3D 场景中点云分析和语义理解领域的宝贵资源。
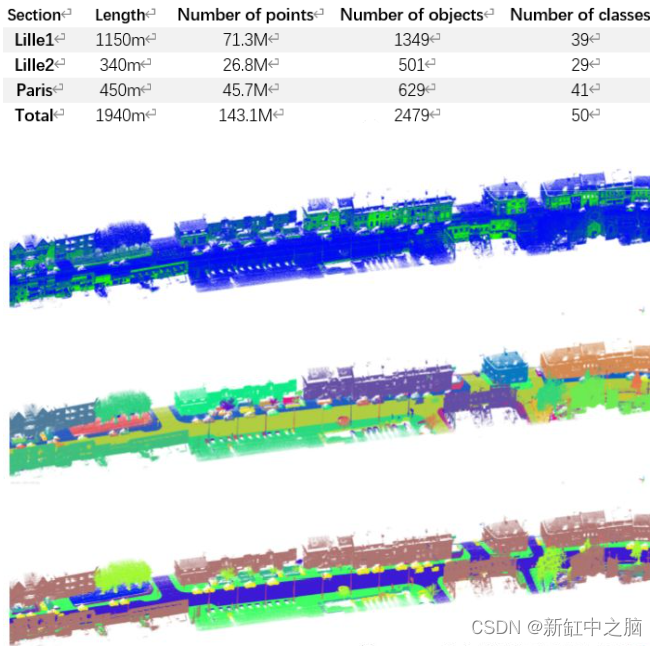
图 6.Paris 小型 3D 数据集示例
8、都柏林城市点云数据集
都柏林城市点云数据集深入探索都柏林市中心,捕获了 14 亿个点云,并在 13 个类别和 3 个级别进行了标注。 都柏林城市是城市建模和语义理解的宝贵资源,促进了复杂城市环境的研究。
数据集被标注为跨 3 个级别的 13 个类(如图 7a 所示):
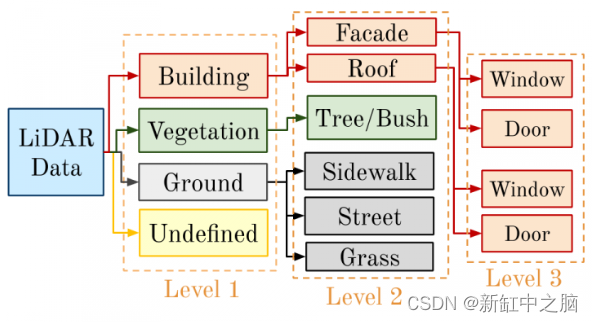
图 7. 标签的层次结构顺序
- 第 1 级:此级别包括四个类别的粗略标签:(a) 建筑物、(b) 地面、© 植被和 (d) 未定义。 建筑物代表了可居住的城市结构的形状,例如房屋、办公室、学校和图书馆。 地面主要由地形高度上的点组成。 植被类别包括所有类型的植物。 最后,未定义的点包括城市元素中可能存在的不太理想的点,例如垃圾桶、装饰雕塑、汽车、长凳、灯柱、邮箱和非静态物体。 大约 10% 的点被标记为“未定义”,主要代表河流、铁路和建筑工地上的点。
- 第2 级:在此级别中,对 1 级的三个类别进行了进一步分类。 建筑物被标记为屋顶和外墙; 植被分为不同类型的植物,例如乔木和灌木; 地面点分为街道、人行道和草地。
- 第 3 级:此级别包括屋顶上的任何类型的门窗(例如天窗和屋顶窗户)和外墙。
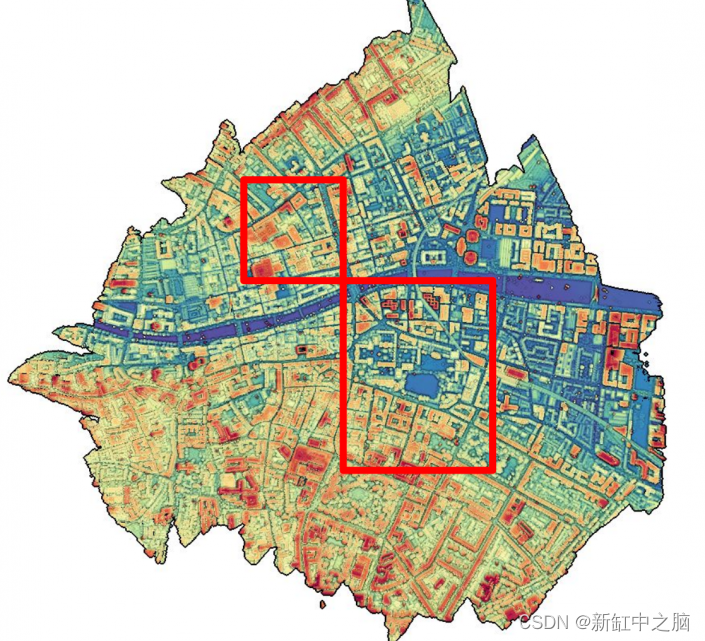
图 8. 数据概览(红框内大部分区域已标记)
DublinCity 数据集为城市环境中 3D 城市建模、点云分析和语义理解的研究和开发提供了宝贵的资源。
原文链接:8个免费的激光点云数据集 — BimAnt