1、建立安全测距Establish Secure Ranging
车端总共有三种建立安全测距的方式,具体如下:
1) Optimal Flow
2) Sub-Optimal Flow
3) Ranging Recovery Flow
为了确定建立安全测距需要执行哪条流程,车辆需要进行以下流程选择。当车辆和设备使用相同的URSK交换UWB安全测距消息时,测距session被视为一个Active Ranging Session。具体流程如下图所示。

如果车辆需要对手机进行定位,则车辆应首先检查应启动哪个流程以建立安全测距。为此,车辆应首先检查它是否已经有一个active ranging session。如果是,车辆将使用该session来定位手机。
如果没有active ranging session,则车辆将检查是否存在激活的URSK。如果是,则车辆应遵循ranging recovery flow恢复与该活动URSK关联的测距session(使用其UWB_Session_Id)。
如果没有激活的URSK,车辆将检查是否存在pre-derived URSK。如果有,则车辆将遵循optimal flow建立安全测距。
如果没有激活的URSK或pre-derived URSK,车辆将退回到sub-optimal flow。
如果有一个激活的测距session,如果车辆的URSK TTL即将到期,或者车辆决定使用一个TTL更短的URSK来启动发动机(参见第19.5.6.1节),车辆可以用一个pre-derived URSK建立一个新的Secure ranging session。
当pre-derived URSK激活时,车辆和手机应丢弃先前激活的URSK(如果有的话)。
2、Optimal Flow,即Secure Ranging Setup
如果车辆具有可用的pre-derived URSK,则应由车辆执行Optimal flow。Optimal flow只需简单地遵循Secure Ranging Setup flow,使用pre-derived URSK。如下图:

如果车辆使用此流程激活pre-derived URSK,则车辆和手机应在新URSK被激活之前丢弃当前激活的URSK(如果有的话)以获得相关的数字钥匙。
为了建立安全测距,每条消息都应使用消息类型:UWB Ranging Service message,如下表。

3、Sub-Optimal Flow
如果车辆没有可用的pre-derived URSK,则执行Sub-Optimal流程。Sub-Optimal流程是URSK生成流程和Secure Ranging Setup流程的结合,如下图。

此外,如果手机在执行Optimal流程时,激活URSK失败并且无其他可用的Pre-derived URSK,或者当车辆URSK与手机URSK不同步时,车辆应退回到Sub-Optimal流程。
一旦通过使用Optimal流程或Sub-Optimal流程建立了安全测距,车辆就可以定位手机。一旦定位到手机,则车辆可以执行PE进入功能。
4、Ranging Recovery Flow
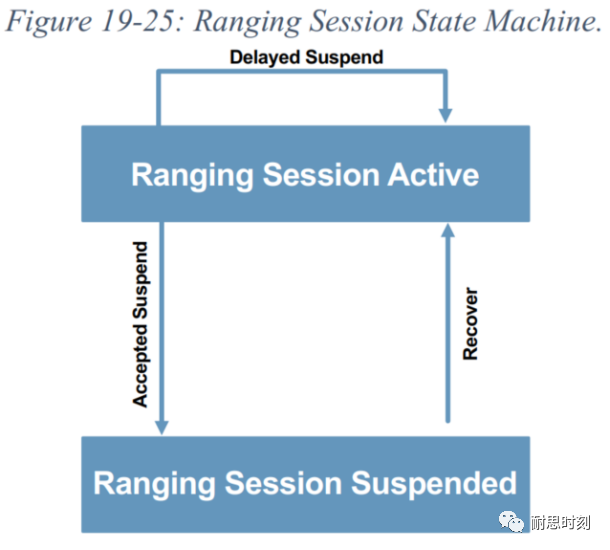
一旦建立了测距session,只要它的URSK TTL没有过期或STS_Index没有达到最大限制,它就可以在很长一段时间内处于激活状态。但是,如图19-25所示,车辆或手机可能会将Active Ranging Session置于暂停状态,以进行功率优化。
何时发送Ranging Suspend Request,取决于发送方/请求方。但是,接收方可以选择在有限的时间内延迟Ranging Suspend Request。
例如,如果手机在很长一段时间内没有检测到任何运动,则手机可以请求将测距session置于暂停状态。另一方面,如果车辆强烈认为,目前仍然需要测距,或将在不久的将来需要测距,则可能会响应延迟Ranging Suspend Request的请求。
下图是手机请求执行Ranging Suspend Request,车端接收该请求的流程【Ranging_Suspend_RS(0x00)】。

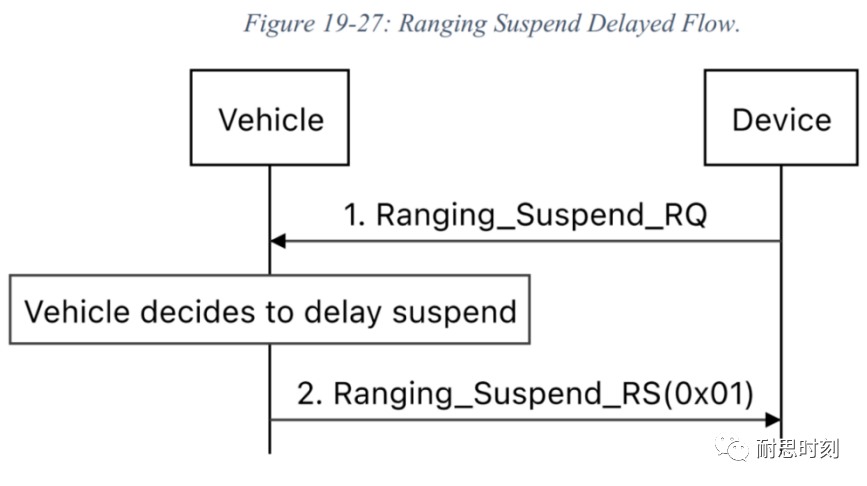
下图是手机请求执行Ranging Suspend Request,但返回延时的流程【Ranging_Suspend_RS(0x01)】。
当处于测距暂停模式时,车辆可以向手机发送测距恢复请求消息(见19.3.1.9节)。手机可以通过向车辆发送Device Ranging Intent SubEvent来触发测距恢复。
Ranging Recovery flow提供了一个低延迟的安全测距(最小的交换),且无新的URSK。
但是,在启动Ranging Recovery 流程之前,车辆必须满足以下要求:
1、 是否有一个激活的URSK (TTL未过期)与车辆打算恢复的暂停测距会话相关联。
2、 打算恢复的暂停测距会话不需要改变测距配置,如改变频率、锚点编号等。
如果车辆需要安全测距,车辆将检查连接的手机是否存在暂停的测距会话,并判断是否同时满足上述两个要求。
如果是,车辆将启动Ranging Recovery流程。当手机接收到测距恢复请求时,它应该识别出提供的UWB_Session_Id的同一组配置,用于建立测距会话。
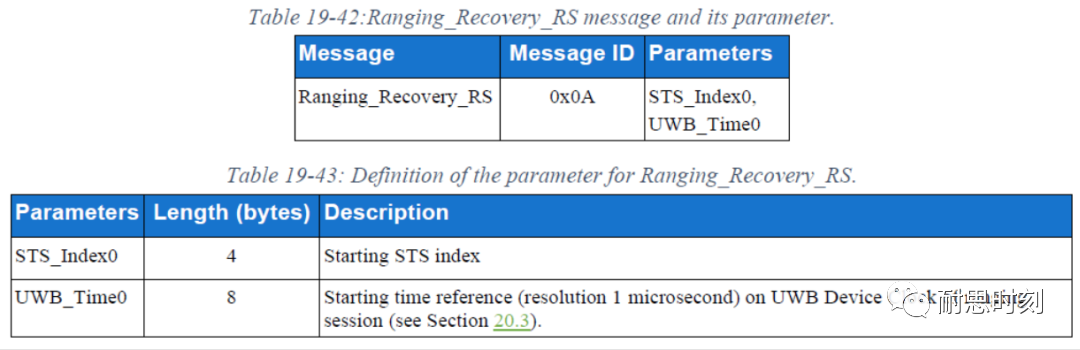
然后手机将选择并发送一个新的UWB_Time0和STS_Index0。测距恢复流程如下图所示:

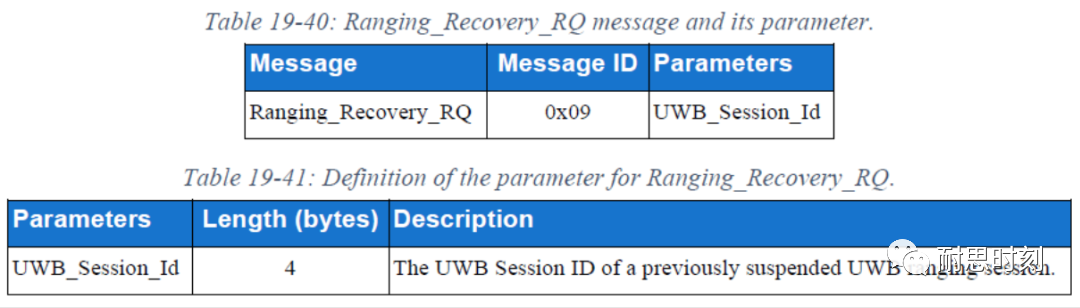
上图步骤1:Ranging_Recovery_RQ由车端发出,其报文定义及相关参数定义如下:
上图步骤2:Ranging_Recovery_RS由手机端发出,其报文定义及相关参数定义如下:
上图步骤D框,车辆选择之前协商的UWB配置参数,用于恢复测距会话的UWB_Session_Id。
5、低功耗模式处理
当车辆处于低功耗状态时,在建立BLE连接后可能无法开始测距。在这种情况下,车辆可能会发送vehicle state SubEvent notification,表明其“低功耗模式”。收到此通知后,手机应负责使用Ranging Intent SubEvent来启动测距。该手机可能会立即发送Ranging Intent,或者在检测到车辆接近时,稍后以更高的置信度发送Ranging Intent。
6、总结
车端总共有三种建立安全测距的方式,具体如下:
1) Optimal Flow
2) Sub-Optimal Flow
3) Ranging Recovery Flow
1、Optimal Flow,即Secure Ranging Setup流程。发生在测距未建立前,但无激活的URSK,且已有pre-derived URSK。
2、Sub-Optimal Flow,即URSK生成流程+Secure Ranging Setup流程。发生在测距未建立前,但无激活的URSK,且无pre-derived URSK。
3、Ranging Recovery Flow,发生在测距已暂停, 且有激活的URSK,及不需要改变测距配置。
4、当车辆处于低功耗模式时,可能无法测距,此时车端可能会发送vehicle state SubEvent notification,表明处于低功耗模式;手机接收到后,再发送Ranging Intent SubEvent来启动测距。