2D&3D融合
概述
截止目前为止,我们学习了机器人学,学习了2D和3D视觉算法。我们也学习了2D相机(图像数据的来源)和3D相机(点云数据的来源)工作原理。
实际上,我们最终要做的,是一个手眼机器人系统。在这个系统里,相机与机器人构成了两个非常关键的部分,它们之间需要密切配合,因此,它们之间的关系,也就非常重要。确定相机与机器人之间的关系,这是手眼标定要解决的问题。
另一方面,在很多场合,为了增强算法的鲁棒性,我们通常同时使用图像数据与点云数据,这又涉及到2D与3D配准的问题。
相机配准
- 方式一:
通过双重循环遍历
/**
* 将彩色图和深度图合并成点云
* @param matrix 相机内参矩阵3x3
* @param rgb 彩色图
* @param depth 深度图
* @param cloud 输出点云
*/
static void convert(Mat &matrix, Mat &rgb, Mat &depth, PointCloud::Ptr &cloud) {
double camera_fx = matrix.at<double>(0, 0);
double camera_fy = matrix.at<double>(1, 1);
double camera_cx = matrix.at<double>(0, 2);
double camera_cy = matrix.at<double>(1, 2);
cout << "fx: " << camera_fx << endl;
cout << "fy: " << camera_fy << endl;
cout << "cx: " << camera_cx << endl;
cout << "cy: " << camera_cy << endl;
// 遍历深度图
for (int v = 0; v < depth.rows; v++)
for (int u = 0; u < depth.cols; u++) {
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(v)[u];
// d 可能没有值,若如此,跳过此点
if (isnan(d) && abs(d) < 0.0001)
continue;
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / 1000; //单位是米
p.x = (u - camera_cx) * p.z / camera_fx;
p.y = (v - camera_cy) * p.z / camera_fy;
// 从rgb图像中获取它的颜色
// rgb是三通道的BGR格式图,所以按下面的顺序获取颜色
Vec3b bgr = rgb.at<Vec3b>(v, u);
p.b = bgr[0];
p.g = bgr[1];
p.r = bgr[2];
// 把p加入到点云中
cloud->points.push_back(p);
//cout << cloud->points.size() << endl;
}
// 设置并保存点云
cloud->height = 1;
cloud->width = cloud->points.size();
cout << "point cloud size = " << cloud->points.size() << endl;
cloud->is_dense = false;
}
int main(){
cv::Mat cameraMatrix; // 从文件加载相机内参
cv::Mat rgb; // 从相机得到RGB彩色图
cv::Mat depth; // 从相机得到depth深度图
PointCloud::Ptr pCloud = PointCloud::Ptr(new PointCloud);
convert(cameraMatrix, rgb, depth, pCloud);
}
- 方式二:
通过指针遍历,并提前准备好计算矩阵
#include <iostream>
#include <opencv2/opencv.hpp>
#include <sstream>
#include <cstdlib>
#include <pcl/io/io.h>
using namespace std;
using namespace cv;
float qnan_ = std::numeric_limits<float>::quiet_NaN();
const char *cameraInCailFile = "./assets/3DCameraInCailResult.xml";
Eigen::Matrix<float, 1920, 1> colmap;
Eigen::Matrix<float, 1080, 1> rowmap;
//const short w = 512, h = 424;
const short w = 1920, h = 1080;
void prepareMake3D(const double cx, const double cy,
const double fx, const double fy) {
float *pm1 = colmap.data();
float *pm2 = rowmap.data();
for (int i = 0; i < w; i++) {
*pm1++ = (i - cx + 0.5) / fx;
}
for (int i = 0; i < h; i++) {
*pm2++ = (i - cy + 0.5) / fy;
}
}
/**
* 根据内参,合并RGB彩色图和深度图到点云
* @param cloud
* @param depthMat
* @param rgbMat
*/
void getCloud(pcl::PointCloud<pcl::PointXYZRGB>::Ptr &cloud, Mat &depthMat, Mat &rgbMat) {
const float *itD0 = (float *) depthMat.ptr();
const char *itRGB0 = (char *) rgbMat.ptr();
if (cloud->size() != w * h)
cloud->resize(w * h);
pcl::PointXYZRGB *itP = &cloud->points[0];
bool is_dense = true;
for (size_t y = 0; y < h; ++y) {
const unsigned int offset = y * w;
const float *itD = itD0 + offset;
const char *itRGB = itRGB0 + offset * 4;
const float dy = rowmap(y);
for (size_t x = 0; x < w; ++x, ++itP, ++itD, itRGB += 4) {
const float depth_value = *itD / 1000.0f;
if (!isnan(depth_value) && abs(depth_value) >= 0.0001) {
const float rx = colmap(x) * depth_value;
const float ry = dy * depth_value;
itP->z = depth_value;
itP->x = rx;
itP->y = ry;
itP->b = itRGB[0];
itP->g = itRGB[1];
itP->r = itRGB[2];
} else {
itP->z = qnan_;
itP->x = qnan_;
itP->y = qnan_;
itP->b = qnan_;
itP->g = qnan_;
itP->r = qnan_;
is_dense = false;
}
}
}
cloud->is_dense = is_dense;
}
int main(){
Mat cameraMatrix = cv::Mat_<double>(3, 3);
FileStorage paramFs(cameraInCailFile, FileStorage::READ);
paramFs["cameraMatrix"] >> cameraMatrix;
// 内参数据
double fx = cameraMatrix.at<double>(0, 0);
double fy = cameraMatrix.at<double>(1, 1);
double cx = cameraMatrix.at<double>(0, 2);
double cy = cameraMatrix.at<double>(1, 2);
// 提前准备计算所需参数
prepareMake3D(cx, cy, fx, fy);
cv::Mat rgbMat; // 从相机得到RGB彩色图
cv::Mat depthMat; // 从相机得到depth深度图
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>());
getCloud(cloud, depthMat, rgbMat)
}手眼标定(外参标定)
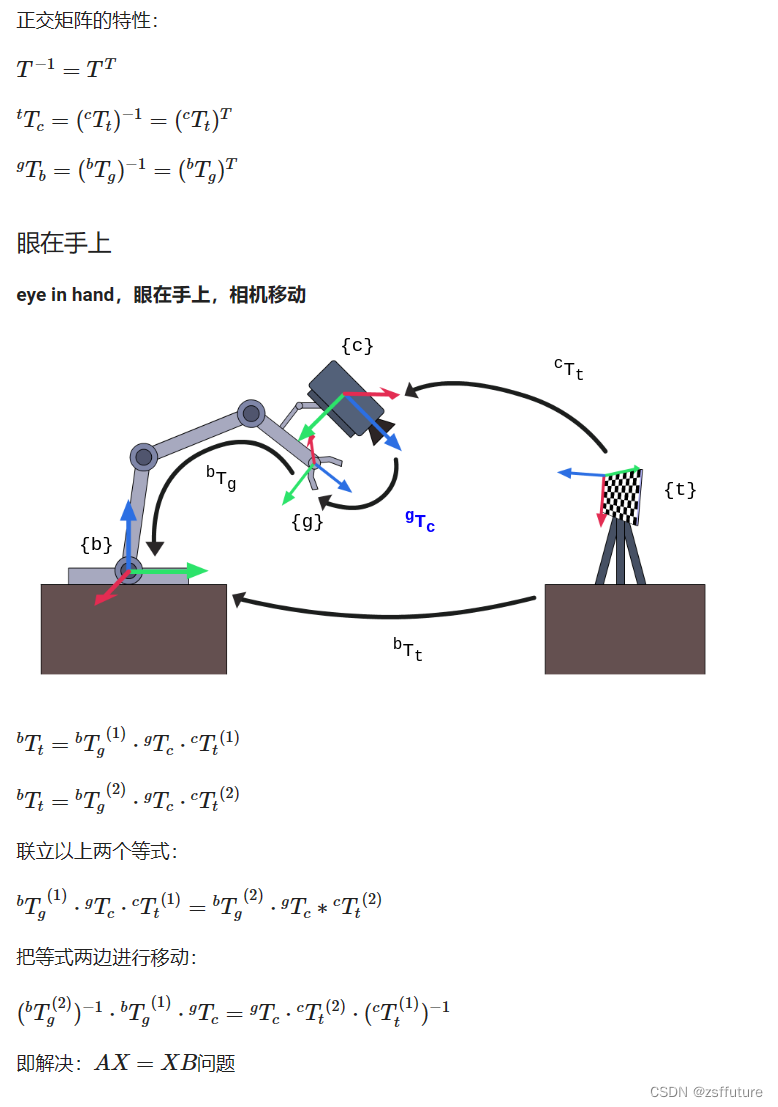
一、手眼标定的原理
图例说明:
- {b}:base基座标系
- {g}:gripper抓手坐标系
- {t}:target标定板坐标系
- {c}:camera相机坐标系


二、手眼标定的操作¶
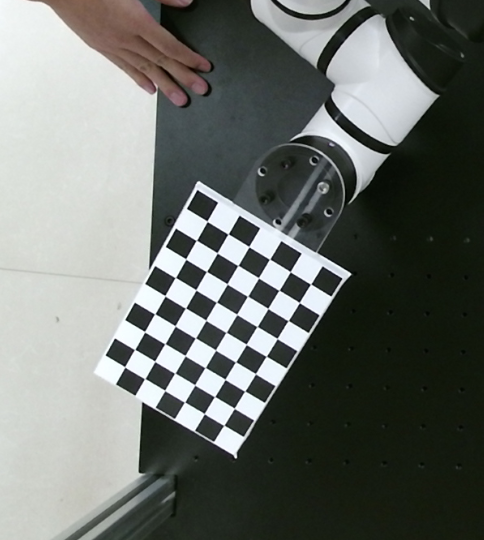
- 将标定板固定在机械臂末端
- 开启机械臂,开启摄像头
- 在距离摄像头40、60、80cm的距离上,在摄像头可见范围内,使用各种角度各拍照15-20张照片,一共45-60张。
- 同时保存照片以及对应拍照时机械臂位姿
- 准备好之前标定的相机内参
- 执行手眼标定API,得到相机在基坐标系的表达(旋转矩阵R+平移向量t)
三、自己动手实现手眼标定及验证¶
- 从文件及图片读取照片
// Created by poplar on 19-7-25.
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/calib3d.hpp>
#include "boost/filesystem.hpp" // includes all needed Boost.Filesystem declarations
#include <boost/algorithm/string/predicate.hpp>
#include <opencv2/imgcodecs.hpp>
#include "tinyxml/tinyxml2.h"
#include <map>
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
// Eigen 几何模块
#include <Eigen/Geometry>
#include <rw/math/Rotation3D.hpp>
#include <rw/math/Vector3D.hpp>
#include <rw/math/RPY.hpp>
#include <opencv/cxeigen.hpp>
#include <opencv/cv.hpp>
#include "utils/Rotation3DUtils.h"
using namespace boost::filesystem; // for ease of tutorial presentation;
// a namespace alias is preferred practice in real code
using namespace tinyxml2;
using namespace Eigen;
using namespace cv;
using namespace std;
using namespace rw::math;
// Eigen
// OpenCV
// RobWork
const string prefix_path = "/home/ty/Workspace/Robot/calibration-single";
const string intrinsicsPath = prefix_path + "/CaliResult/3DCameraInCailResult.xml";
const string pic_dir_path = prefix_path + "/ImageFromCamera";
const string exten = "bmp";
const string extrinsic_params = prefix_path + "/extrinsic_input_param.xml";
// const string extrinsic_params = "/home/poplar/Lesson/Cobot/Aubo/calibration-single/extrinsic_input_param_t.xml";
const string exCailFilePath = prefix_path + "/CaliResult/3DCameraExCailResult.xml";
enum Pattern {
CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID
};
void printPose(const vector<double> &pose);
void calcChessboardCorners(const Size &boardSize, float squareSize, vector<Point3f> &corners,
Pattern patternType = CHESSBOARD) {
corners.resize(0);
switch (patternType) {
case CHESSBOARD:
case CIRCLES_GRID:
for (int i = 0; i < boardSize.height; i++) // 9
for (int j = 0; j < boardSize.width; j++) // 6
corners.emplace_back(float(j * squareSize),
float(i * squareSize), 0);
break;
case ASYMMETRIC_CIRCLES_GRID:
for (int i = 0; i < boardSize.height; i++)
for (int j = 0; j < boardSize.width; j++)
corners.emplace_back(float((2 * j + i % 2) * squareSize),
float(i * squareSize), 0);
break;
default:
CV_Error(Error::StsBadArg, "Unknown pattern type\n");
}
}
/**
* 通过图片集合 填充 旋转矩阵&平移矩阵
* @param R_target2cam
* @param t_target2cam
* @param imgPaths
*/
bool fillFromImages(vector<Mat> &R_target2cam, std::vector<Mat> &t_target2cam, std::vector<path> &imgPaths) {
const Size patternSize(6, 9);
const float squareSize = 20;
//! [compute-poses]
std::vector<Point3f> objectPoints;
// [
// [0, 0 , 0]
// [0, 20, 0]
// [0, 40, 0]
// ...
// [20, 0, 0]
// ...
// ]
calcChessboardCorners(patternSize, squareSize, objectPoints);
// 通过内参进行矫正
// 检测角点
// 计算变换矩阵(旋转矩阵+平移矩阵)
cv::FileStorage fs(intrinsicsPath, FileStorage::READ);
Mat cameraMatrix, distCoeffs;
fs["cameraMatrix"] >> cameraMatrix;
fs["distCoeffs"] >> distCoeffs;
// 遍历图片
for (const auto &path: imgPaths) {
const string &s_path = path.string();
// std::cout << s_path << std::endl;
const Mat &img_mat = imread(s_path, IMREAD_UNCHANGED);
// 查找图片所有角点
std::vector<Point2f> corners;
bool isFound = cv::findChessboardCorners(img_mat, patternSize, corners);
if (!isFound) {
std::cerr << "Image not found corners: " << s_path << std::endl;
return false;
}
// std::cout << corners.size() << std::endl;
cv::Mat rvec = cv::Mat::zeros(3, 1, CV_64FC1);
cv::Mat tvec = cv::Mat::zeros(3, 1, CV_64FC1);
// solveP3P
// 根据:
// objectPoints(角点行列信息&大小信息)
// corners所有角点信息
// 内参
// 得到:
// 旋转向量,平移向量
solvePnP(objectPoints, corners, cameraMatrix, distCoeffs, rvec, tvec);
// raux.convertTo(Rvec, CV_32F); //旋转向量
// taux.convertTo(Tvec, CV_32F); //平移向量
Mat R; // 旋转矩阵 <-> 旋转向量
// Transforms Rotation Vector to Matrix
Rodrigues(rvec, R); // solvePnP返回的是旋转向量,故用罗德里格斯变换变成旋转矩阵
cout << "rotation vector rvec =\n" << rvec << endl;
cout << "rotation R =\n" << R << endl;
cout << "translation vector tvec =\n" << tvec << std::endl;
const Vec3f &oulerAngles = rotationMatrixToEulerAngles(R);
std::cout << "oulerAngles = \n" << oulerAngles * RA2DE << std::endl; // zyx (RPY)
// Rotation3D<double> rot(R);
std::cout << "Image path: " << s_path << std::endl;
R_target2cam.push_back(R);
// t_target2cam.push_back(tvec);
t_target2cam.push_back(tvec / 1000);
// const Mat &img_mat = imread(s_path, IMREAD_UNCHANGED);
// Mat smallImg;
// resize( img_mat, smallImg, Size(), 0.5, 0.5, INTER_LINEAR_EXACT);
// cv::imshow("img_chess", smallImg);
// std::cout << s_path << std::endl;
// waitKey(0);
}
return true;
}
/**
* 求齐次矩阵的逆矩阵
* @param T
* @return
*/
static Mat homogeneousInverse(const Mat &T) {
CV_Assert(T.rows == 4 && T.cols == 4);
Mat R = T(Rect(0, 0, 3, 3));
Mat t = T(Rect(3, 0, 1, 3));
Mat Rt = R.t();
Mat tinv = -Rt * t;
Mat Tinv = Mat::eye(4, 4, T.type());
Rt.copyTo(Tinv(Rect(0, 0, 3, 3)));
tinv.copyTo(Tinv(Rect(3, 0, 1, 3)));
return Tinv;
}
/**
* 外参标定
*
* 输入:
* 60组:t2c
* 标定板在相机坐标系的表达(标定板到相机的转换矩阵->旋转矩阵R+平移向量t)
* 内参(用于求相机在标定板坐标系的表达)
*
* 60组:b2g (g2b求逆)
* 末端gripper的x,y,z,r,p,y-> 旋转矩阵R+平移向量t, 笛卡尔(RPY转旋转矩阵)
* 求逆(转置),正交矩阵两个计算结果一致
*
* 输出:
* 外参 :
* 相机在Base坐标系的表达 (轴角对+平移向量t) (旋转矩阵R+平移向量t)
*
* 验证:
* 通过现有图片及标定结果进行验证
* @return
*/
int main() {
// 相机坐标系下标定板(目标)的表达 (通过 彩图&深度图&内参 获得) ---------------1
std::vector<Mat> R_target2cam, t_target2cam;
// 读取照片&深度图
if (!exists(pic_dir_path)) {
std::cout << pic_dir_path << " not exist" << std::endl;
return 0;
}
int counter{0};
// 将所有外参标定的照片路径存到imgPaths
vector<path> imgPaths;
directory_iterator end_itr;
for (directory_iterator itr(pic_dir_path); itr != end_itr; ++itr) {
if (!is_directory(itr->status())) {
path file_path = itr->path();
const path &filename = file_path.filename();
if (boost::starts_with(filename.string(), "raw_color_extrinsic_pose")) {
// std::cout << filename.string() << std::endl;
imgPaths.push_back(file_path);
// counter++;
// if (counter >= 5){
// break;
// }
}
}
}
// 通过识别图像及角点,得到相机到标定板的变换矩阵 (内参)
bool rst = fillFromImages(R_target2cam, t_target2cam, imgPaths);
if (!rst) {
return -1;
}
std::cout << "R_target2cam: " << R_target2cam.size() << std::endl;
std::cout << "t_target2cam: " << t_target2cam.size() << std::endl;
std::cout << " --------------------------------------------- 相机坐标系下标定板(目标)的表达 OK -------------------------------------------- ↑" << std::endl;
// 基坐标Base下末端TCP(gripper)的表达 (通过设备获得) ---------------2
std::vector<Mat> R_gripper2base, t_gripper2base;
// 轴角对&平移 -> 旋转矩阵&平移矩阵
XMLDocument doc;
doc.LoadFile(extrinsic_params.c_str());
XMLElement *root = doc.RootElement();
XMLElement *extrinsics = root->FirstChildElement("extrinsic");
map<std::string, vector<double>> map;
while (extrinsics) {
const char *image_path = extrinsics->FirstChildElement("Limage_color_path")->GetText();
string img_path = std::string(image_path);
string img_name = img_path.substr(img_path.find_last_of('/') + 1, -1);
// std::cout << image_path << " name: " << img_name << std::endl;
double pose1 = atof(extrinsics->FirstChildElement("pose1")->GetText());
double pose2 = atof(extrinsics->FirstChildElement("pose2")->GetText());
double pose3 = atof(extrinsics->FirstChildElement("pose3")->GetText());
double pose4 = atof(extrinsics->FirstChildElement("pose4")->GetText());
double pose5 = atof(extrinsics->FirstChildElement("pose5")->GetText());
double pose6 = atof(extrinsics->FirstChildElement("pose6")->GetText());
vector<double> pose{pose1, pose2, pose3, pose4, pose5, pose6};
// 字典map保存的图片文件名及对应的=位姿
map[img_name] = pose;
extrinsics = extrinsics->NextSiblingElement();
}
// 将对应图片的机械臂笛卡尔空间坐标pose转成 旋转矩阵+平移矩阵
for (const path &p: imgPaths) {
std::string f_name = p.filename().string();
try {
// 取出每个图片对应的位姿
vector<double> &pose = map.at(f_name);
if (pose.empty()) {
std::cerr << "pose empty" << std::endl;
return -1;
}
// std::cout << f_name << " -> ";printPose(pose);
cv::Vec3f eulerAngles(pose[3],pose[4],pose[5]);
const Mat &R = eulerAnglesToRotationMatrix(eulerAngles);
cout << "rotation matrix3 eulerAngles =\n" << eulerAngles << endl;
cout << "rotation matrix3 R =\n" << R << endl;
cv::Mat t = (cv::Mat_<double>(3,1) << pose[0], pose[1], pose[2]);
cout << "translation matrix3 t =\n" << t << endl;
R_gripper2base.push_back(R);
// t_gripper2base.push_back(t);
t_gripper2base.push_back(t / 1000);
// const string &s_path = p.string();
// const Mat &img_mat = imread(s_path, IMREAD_UNCHANGED);
// Mat smallImg;
// resize( img_mat, smallImg, Size(), 0.5, 0.5, INTER_LINEAR_EXACT);
// cv::imshow("img_chess", smallImg);
// std::cout << s_path << std::endl;
// waitKey(0);
} catch (const std::out_of_range &e) {
std::cerr << f_name << " was not found." << std::endl;
}
}
std::cout << " --------------------------------------------- 基坐标Base下末端TCP(gripper)的表达 -------------------------------------------- ↑" << std::endl;
// return 0;
// std::cout << map["raw_color_extrinsic_pose_07_26_17_01_59_965.bmp"].size()<< std::endl;
// TCP坐标系下基坐标的表达
std::vector<Mat> R_base2gripper, t_base2gripper;
// 转换成逆矩阵
unsigned long size = R_gripper2base.size();
R_base2gripper.reserve(size);
t_base2gripper.reserve(size);
for (size_t i = 0; i < size; i++) {
// 获取每个抓手的姿态(旋转矩阵)
Mat R = R_gripper2base[i];
Mat Rt = R.t(); // 转置
R_base2gripper.push_back(Rt);
// 获取每个抓手的位置
Mat t = t_gripper2base[i];
Mat tinv = -Rt * t;
t_base2gripper.push_back(tinv);
cout << "base2gripper Rt=\n" << Rt << endl;
cout << "base2gripper tinv =\n" << tinv << endl;
}
std::cout << " --------------------------------------------- 末端TCP坐标下Base的表达 -------------------------------------------- ↑" << std::endl;
std::cout << R_target2cam.size() << ":" << t_target2cam.size() << '\n' <<
R_base2gripper.size() << ":" << t_base2gripper.size() << std::endl;
std::cout << "---------------------calibrateHandEye start !---------------------" << std::endl;
// 求Base基坐标下相机Cam的表达
Mat R_cam2base_est, t_cam2base_est;
// 进行手眼标定(外参)
cv::calibrateHandEye(
R_base2gripper, t_base2gripper,
R_target2cam, t_target2cam,
R_cam2base_est, t_cam2base_est,
HandEyeCalibrationMethod::CALIB_HAND_EYE_DANIILIDIS);
cout << "旋转矩阵 est: \n" << R_cam2base_est << endl;
cout << "平移矩阵 est: \n" << t_cam2base_est * 1000 << endl;
double angle = 0;
double axisX = 0;
double axisY = 0;
double axisZ = 0;
double translationX = 0;
double translationY = 0;
double translationZ = 0;
// 使用opencv读取文件
cv::FileStorage fs(exCailFilePath, cv::FileStorage::READ);
fs["Angle"] >> angle;
fs["AxisX"] >> axisX;
fs["AxisY"] >> axisY;
fs["AxisZ"] >> axisZ;
fs["TranslationX"] >> translationX;
fs["TranslationY"] >> translationY;
fs["TranslationZ"] >> translationZ;
// 轴角对
Vector3d axisMatrix(axisX, axisY, axisZ);
AngleAxisd angleAxisd(angle, axisMatrix);
// 获取旋转矩阵
const Eigen::AngleAxis<double>::Matrix3 &rotationMatrix = angleAxisd.toRotationMatrix();
// cout << "旋转矩阵e:" << rotationMatrix << endl;
// 获取平移矩阵
Vector3d t_cam2base_eigen(translationX, translationY, translationZ);
// 获取输出结果
// cout << "平移向量e:" << t_cam2base_eigen << endl;
// 真实值,eigen转成cv
cv::Mat_<double> R_cam2base_true(3, 3);
cv::eigen2cv(rotationMatrix,R_cam2base_true);
cv::Mat_<double> t_cam2base_true(3, 1);
cv::eigen2cv(t_cam2base_eigen,t_cam2base_true);
cout << "旋转矩阵 true: \n" << R_cam2base_true << endl;
cout << "平移矩阵 true: \n" << t_cam2base_true << endl;
// 估算的 旋转矩阵->旋转向量
// Mat rvec_cam2base_est;
// cv::Rodrigues(R_cam2base_est, rvec_cam2base_est);
// 真实的 旋转矩阵->旋转向量
// Mat rvec_cam2base_true;
// cv::Rodrigues(R_cam2base_true, rvec_cam2base_true);
// cout << "旋转矩阵 est: \n" << rvec_cam2base_est << endl;
// cout << "平移向量 est: \n" << t_cam2base_true << endl;
// double rvecDiff = norm(rvec_cam2base_true, rvec_cam2base_est, NormTypes::NORM_L2);
// double tvecDiff = norm(t_cam2base_true, t_cam2base_est, NormTypes::NORM_L2);
// std::cout << "rvecDiff:" << rvecDiff << " tvecDiff:" << tvecDiff << std::endl;
return 0;
}
void printPose(const vector<double> &pose) {
cout << "[" <<
pose[0] << " " << pose[1] << " " << pose[2] << " " <<
pose[3] << " " << pose[4] << " " << pose[5] << " " <<
"]" << endl;
}2D与3D融合实践¶
根据模板抓取指定物体:
制作模板,并计算取得相机到模板的变换矩阵T1,根据实时相机中拍到的物体进行模板匹配,得到变换矩阵T0,最后和相机的外参矩阵Tc进行矩阵相乘,得到目标在世界坐标系的表示,从而进行抓取操作。
一、制作模板:求T1¶
-
Kinect相机拍照(得到RGB图和深度图)
01_PhotoCapture.cpp -
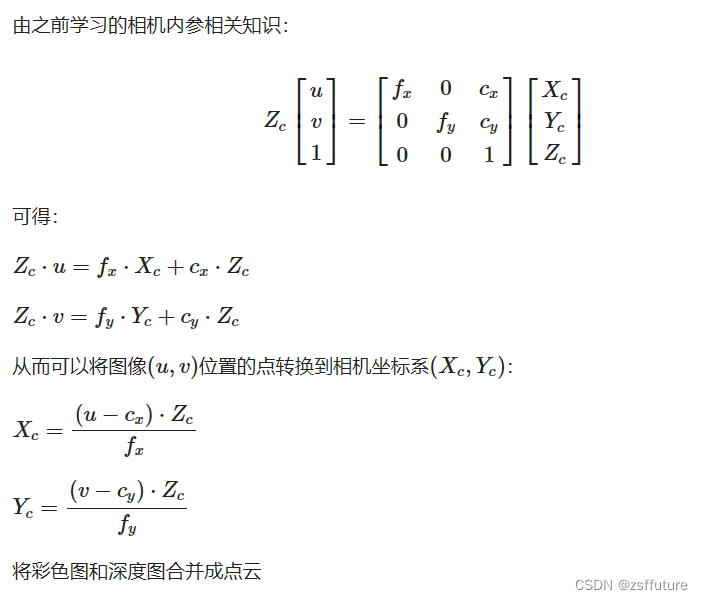
检测抓取位置(u,v),根据内参及深度信息得到三个空间中的点坐标
02_PointLocator.cpp03_TemplateMaker.cpp -
构建坐标系得到旋转矩阵T1,转成RPY进行抓取测试
04_TestGrabTemplate.cpp -
生成点云图用于模板匹配(进行直通滤波及降采样)
05_CreatePclCloud.cpp验证变换矩阵06_TemplateCloudFilter.cpp生成剪切后的模板- 实时的拍照得到RGB和深度图
- 合成目标点云图
- 通过直通滤波框定范围(得到感兴趣区域)
- 将感兴趣区域进行降采样(提高模板匹配效率)
二、使用模板:求T0¶
准备好切割后的点云template.pcd以及对应的变换矩阵T1(可以有多个)
-
Kinect相机拍照(得到RGB图和深度图)
01_PhotoCapture.cpp -
生成目标点云图
07_TargetCloudFilter.cpp -
进行模板与目标点云图匹配(统一进行直通滤波及降采样),得到变换矩阵T0
08_TemplateAlignment.cpp
三、进行抓取测试¶
![]()
09_TestGrabTarget.cpp√
T0 为目标在模板坐标系的表达 T1 为模板在相机坐标系的表达 Tc 为相机在基坐标系的表达
待优化事宜¶
- 安全位置判定
- 将盒子抓取到指定位置放置
- 不间断抓取多个盒子
- 准备多个模板,提高模板匹配姿态识别度
- 设置间隔,实时进行模板匹配
- 设置目标位置抓取动态延时
- 自动避障
- 其他
自己封装内外参标定工具¶
- 命令行版
- Qt版