原文链接:https://arxiv.org/abs/2211.11646
1. 引言
NeRF模型能直接从给定的RGB图像和相机姿态学习3D场景的NeRF表达。本文提出NeRF-RPN,使用从NeRF模型提取的辐射场和密度,直接生成边界框提案。
3. 方法
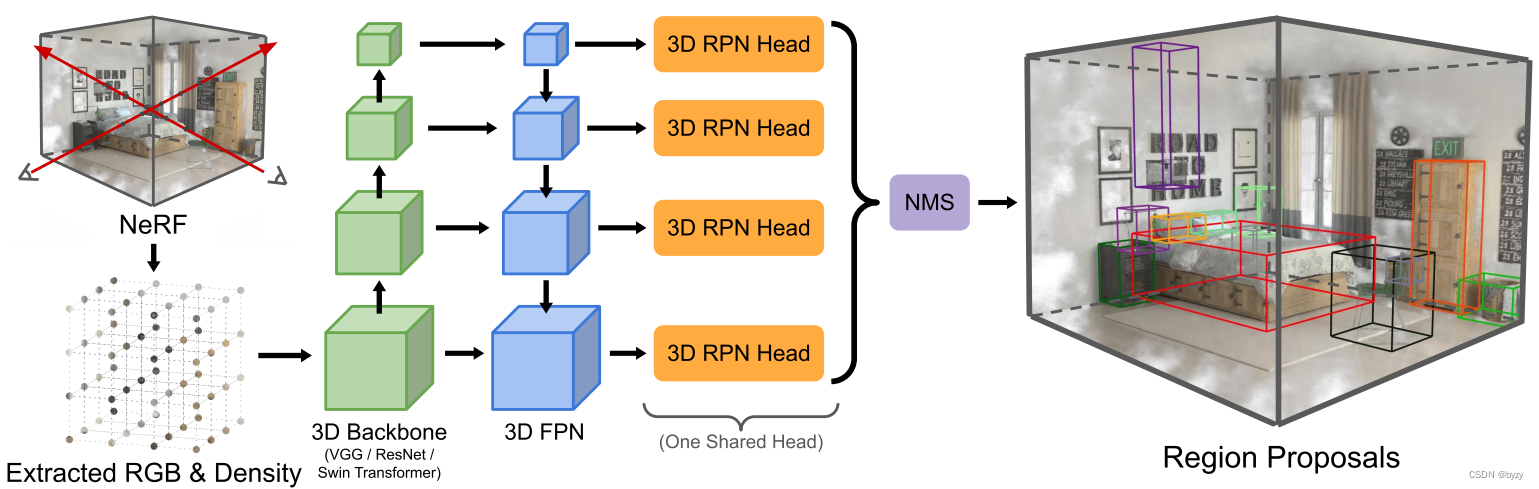
如图所示,本文的方法有两个组成部分,特征提取器(从NeRF采样的辐射和密度网格)和RPN头(生成物体提案)。
3.1 从NeRF输入采样
第一步是均匀采样NeRF模型的辐射和密度场,建立特征体积网格。体积网格的分辨率与各维度范围成正比,从而保证物体的长宽比。对使用RGB作为辐射表达的NeRF模型,本文从NeRF训练时使用的视图集合中采样并平均结果。若相机姿态未知,则从球上均匀采样方向。通常来说,给定样本 ( r , g , b , α ) (r,g,b,\alpha) (r,g,b,α),其中 ( r , g , b ) (r,g,b) (r,g,b)为平均后的辐射, α \alpha α是从密度转换得到的: α = clip ( 1 − exp ( − σ δ ) , 0 , 1 ) \alpha=\text{clip}(1-\exp(-\sigma\delta),0,1) α=clip(1−exp(−σδ),0,1)其中 δ = 0.01 \delta=0.01 δ=0.01是预设的距离。对使用球面谐波或其他基函数表达辐射的NeRF,可以根据下游任务,使用RGB值或基函数的系数作为辐射信息。
3.2 特征提取器
考虑到不同大小的物体和不同尺度的场景,本文特征提取器中使用FPN输出特征金字塔。
3.3 3D区域提案网络
3D RPN以特征金字塔为输入,输出一组有朝向的边界框及其对应的分数。本文实验了两种RPN:基于锚框的和无需锚框的,如下图所示。

基于锚框的RPN:本文在特征金字塔的各层放置不同长宽比和尺寸的3D锚框,使用卷积预测各锚框内物体的偏移量和分数。各层之间的卷积共享权重。边界框偏移量
t
=
(
t
x
,
t
y
,
t
z
,
t
w
,
t
l
,
t
h
,
t
α
,
t
β
)
t=(t_x,t_y,t_z,t_w,t_l,t_h,t_\alpha,t_\beta)
t=(tx,ty,tz,tw,tl,th,tα,tβ)的回归目标被定义如下:
t
x
=
(
x
−
x
a
)
/
w
a
,
t
y
=
(
y
−
y
a
)
/
l
a
,
t
z
=
(
z
−
z
a
)
/
h
a
t
w
=
log
(
w
/
w
a
)
,
t
l
=
log
(
l
/
l
a
)
,
t
h
=
log
(
h
/
h
a
)
t
α
=
Δ
α
/
w
,
t
β
=
Δ
β
/
l
t_x=(x-x_a)/w_a,t_y=(y-y_a)/l_a,t_z=(z-z_a)/h_a\\t_w=\log(w/w_a),t_l=\log(l/l_a),t_h=\log(h/h_a)\\t_\alpha=\Delta\alpha/w,t_\beta=\Delta\beta/l
tx=(x−xa)/wa,ty=(y−ya)/la,tz=(z−za)/hatw=log(w/wa),tl=log(l/la),th=log(h/ha)tα=Δα/w,tβ=Δβ/l其中
x
,
y
,
z
,
w
,
l
,
h
,
α
,
β
x,y,z,w,l,h,\alpha,\beta
x,y,z,w,l,h,α,β为真实边界框参数,
x
a
,
y
a
,
z
a
,
w
a
,
l
a
,
h
a
x_a,y_a,z_a,w_a,l_a,h_a
xa,ya,za,wa,la,ha为锚框参数。
当某提案与任一真实边界框的IoU大于0.35时,或在所有提案中与某一真实边界框的IoU最大时,该提案被标记为正;非正提案中,与所有真实边界框的IoU均小于0.2的被标记为负。其余提案不参与损失函数的计算。损失函数与Faster-RCNN类似,分类使用二元交叉熵损失,回归使用smoothL1损失(仅对正锚框计算):
L
=
1
N
∑
i
L
c
l
s
(
p
i
,
p
i
∗
)
+
λ
N
p
o
s
∑
i
p
i
∗
L
r
e
g
(
t
i
,
t
i
∗
)
L=\frac{1}{N}\sum_iL_{cls}(p_i,p_i^*)+\frac{\lambda}{N_{pos}}\sum_ip^*_iL_{reg}(t_i,t_i^*)
L=N1i∑Lcls(pi,pi∗)+Nposλi∑pi∗Lreg(ti,ti∗)后处理前会将提案转化为长方体。
无需锚框的RPN:类似FCOS,预测分数
p
p
p、中心性
c
c
c和边界框偏移量
t
=
(
x
0
,
y
0
,
z
0
,
x
1
,
y
1
,
z
1
,
Δ
α
,
Δ
β
)
t=(x_0,y_0,z_0,x_1,y_1,z_1,\Delta\alpha,\Delta\beta)
t=(x0,y0,z0,x1,y1,z1,Δα,Δβ)。回归目标被定义为:
x
0
∗
=
x
−
x
0
(
i
)
,
x
1
∗
=
x
1
(
i
)
−
x
,
y
0
∗
=
y
−
y
0
(
i
)
,
y
1
∗
=
y
1
(
i
)
−
y
,
z
0
∗
=
z
−
z
0
(
i
)
,
z
1
∗
=
z
1
(
i
)
−
z
Δ
α
∗
=
v
x
(
i
)
−
x
,
Δ
β
∗
=
v
y
(
i
)
−
y
x_0^*=x-x_0^{(i)},x_1^*=x_1^{(i)}-x,y_0^*=y-y_0^{(i)},y_1^*=y_1^{(i)}-y,z_0^*=z-z_0^{(i)},z_1^*=z_1^{(i)}-z\\\Delta\alpha^*=v_x^{(i)}-x,\Delta\beta^*=v_y^{(i)}-y
x0∗=x−x0(i),x1∗=x1(i)−x,y0∗=y−y0(i),y1∗=y1(i)−y,z0∗=z−z0(i),z1∗=z1(i)−zΔα∗=vx(i)−x,Δβ∗=vy(i)−y其中
x
,
y
,
z
x,y,z
x,y,z表示体素位置,上标
(
i
)
(i)
(i)表示真实边界框,下标0和下标1代表该真实轴对齐边界框在该维度上的下界和上界。
v
x
(
i
)
v_x^{(i)}
vx(i)表示真实边界框在
x
y
xy
xy平面投影中最上方顶点的
x
x
x坐标,
v
y
(
i
)
v_y^{(i)}
vy(i)表示真实边界框在BEV投影中最右方顶点的
y
y
y坐标,如上图所示。中心性的真实值为
c
∗
=
min
(
x
0
∗
,
x
1
∗
)
max
(
x
0
∗
,
x
1
∗
)
×
min
(
y
0
∗
,
y
1
∗
)
max
(
y
0
∗
,
y
1
∗
)
×
min
(
z
0
∗
,
z
1
∗
)
max
(
z
0
∗
,
z
1
∗
)
c^*=\sqrt{\frac{\min(x^*_0,x^*_1)}{\max(x^*_0,x^*_1)}\times\frac{\min(y^*_0,y^*_1)}{\max(y^*_0,y^*_1)}\times\frac{\min(z^*_0,z^*_1)}{\max(z^*_0,z^*_1)}}
c∗=max(x0∗,x1∗)min(x0∗,x1∗)×max(y0∗,y1∗)min(y0∗,y1∗)×max(z0∗,z1∗)min(z0∗,z1∗)总损失为
L
i
=
1
N
∑
i
L
c
l
s
(
p
i
,
p
i
∗
)
+
λ
N
p
o
s
∑
i
p
i
∗
L
r
e
g
(
t
i
,
t
i
∗
)
+
1
N
p
o
s
∑
i
p
i
∗
L
c
t
r
(
c
i
,
c
i
∗
)
L_i=\frac{1}{N}\sum_iL_{cls}(p_i,p_i^*)+\frac{\lambda}{N_{pos}}\sum_ip^*_iL_{reg}(t_i,t_i^*)+\frac{1}{N_{pos}}\sum_ip^*_iL_{ctr}(c_i,c_i^*)
Li=N1i∑Lcls(pi,pi∗)+Nposλi∑pi∗Lreg(ti,ti∗)+Npos1i∑pi∗Lctr(ci,ci∗)其中分类损失为focal损失,回归损失为旋转边界框的IoU损失,中心性损失为二元交叉熵损失。
p
i
∗
∈
{
0
,
1
}
p_i^*\in\{0,1\}
pi∗∈{0,1}为体素真实标签,由FCOS中的中心采样和多级预测过程确定。
N
p
o
s
N_{pos}
Npos为
p
i
∗
=
1
p^*_i=1
pi∗=1的体素数。后处理前同样会将提案转化为长方体。
3.4 额外损失函数

物体分类:虽然NeRF-RPN主要目标是获取高召回率,但有时候低FP率也很重要。本文加入二元分类网络实现前景/背景分割,输入RPN产生的感兴趣区RoI和特征提取器输出的特征金字塔,输出分类分数和RoI的细化偏移量,如上图所示。本文参考Oriented RPN,通过旋转RoI池化,为每个提案
(
x
r
,
y
r
,
z
r
,
w
r
,
l
r
,
h
r
,
θ
r
)
(x_r,y_r,z_r,w_r,l_r,h_r,\theta_r)
(xr,yr,zr,wr,lr,hr,θr)提取具有旋转不变性的特征。首先,放大边界框并划分为特征体积网格,然后使用三线性插值计算每个网格的值,输入到池化层中,得到
N
×
3
×
3
×
3
N\times3\times3\times3
N×3×3×3大小,输入分类和回归分支。此处的边界框偏移量
g
=
(
g
x
,
g
y
,
g
z
,
g
w
,
g
l
,
g
h
,
g
θ
)
g=(g_x,g_y,g_z,g_w,g_l,g_h,g_\theta)
g=(gx,gy,gz,gw,gl,gh,gθ)被定义为:
g
x
=
(
(
x
−
x
r
)
cos
θ
r
+
(
y
−
y
r
)
sin
θ
r
)
/
w
r
,
g
y
=
(
(
y
−
y
r
)
cos
θ
r
−
(
x
−
x
r
)
sin
θ
r
)
/
l
r
,
g
z
=
(
z
−
z
r
)
/
h
r
g
w
=
log
(
w
/
w
r
)
,
g
l
=
log
(
l
/
l
r
)
,
g
h
=
log
(
h
/
h
r
)
,
g
θ
=
(
θ
−
θ
r
)
/
2
π
g_x=((x-x_r)\cos\theta_r+(y-y_r)\sin\theta_r)/w_r,g_y=((y-y_r)\cos\theta_r-(x-x_r)\sin\theta_r)/l_r,g_z=(z-z_r)/h_r\\g_w=\log(w/w_r),g_l=\log(l/l_r),g_h=\log(h/h_r),g_\theta=(\theta-\theta_r)/2\pi
gx=((x−xr)cosθr+(y−yr)sinθr)/wr,gy=((y−yr)cosθr−(x−xr)sinθr)/lr,gz=(z−zr)/hrgw=log(w/wr),gl=log(l/lr),gh=log(h/hr),gθ=(θ−θr)/2π与任一真实边界框的IoU大于0.25的RoI被标记为物体,其余为非物体。损失函数与基于锚框的RPN一节类似,只有边界框偏移量被替换为
g
,
g
∗
g,g^*
g,g∗。
2D投影损失:将3D边界框坐标
b
i
=
(
x
i
,
y
i
,
z
i
)
b_i=(x_i,y_i,z_i)
bi=(xi,yi,zi)投影到2D
b
i
′
=
(
x
i
′
,
y
i
′
)
b'_i=(x'_i,y'_i)
bi′=(xi′,yi′),得到2D投影损失:
L
2
d
p
r
o
j
=
1
N
c
a
m
N
b
o
x
L
r
e
g
(
b
i
′
,
b
i
′
∗
)
L_{2d\ proj}=\frac{1}{N_{cam}N_{box}}L_{reg}(b'_i,{b'_i}^*)
L2d proj=NcamNbox1Lreg(bi′,bi′∗)
5. 实验
5.1 训练&测试
训练:训练时输入场景被随机沿
x
,
y
x,y
x,y轴翻转和沿
z
z
z轴旋转
π
/
2
\pi/2
π/2角。此外,场景也会随机沿
z
z
z轴再旋转一个小角度。对于基于锚框的RPN,每次随机采样256个锚框(正负比为1:1)进行损失计算。
测试:首先过滤场景外的边界框,然后为每个特征尺度选择2500个提案进行非最大抑制后,选择分数最高的2500个提案。
5.2 消融研究
主干和颈部:固定主干和颈部后,无需锚框的RPN有更好的性能,因为中心性预测能抑制那些较远的提案,且锚框固定的长宽比和尺寸限制其对尺寸不一物体的检测。
NeRF采样策略:NeRF的密度场是与视图无关的,而辐射场是与视图方向相关的,有各种编码方式。在补充材料中的实验表明,仅使用密度是最佳策略。
回归损失:使用IoU损失、DIoU损失以及其作用于带朝向边界框的变体进行实验,表明IoU损失能有更好的性能。
5.3 结果
实验表明,质量较差的NeRF重建会严重影响边界框预测。
应用:场景编辑。给定NeRF-RPN输出的提案,可以对NeRF场景进行编辑,如在渲染时设置提案内的密度为0。
补充材料
2. 对NeRF采样策略的消融研究
为探究NeRF视图相关的辐射信息对检测性能的影响,本文实验了下列采样方式:
- 仅使用密度;
- 使用固定的18个视图的平均辐射 + 密度;
- 使用训练时所有相机视图的平均辐射 + 密度;
- 在3的基础上,只选择视锥内包含采样点的训练视图;
- 使用最高3阶的球面谐波(SH)系数(SH函数是从球面上的300个方向均匀采样辐射得到的) + 密度。
实验表明,1的性能最优,这表明辐射信息会影响性能。
3. 物体分类
实验表明,使用物体分类损失会使性能下降。这可能是特征体积网格的分辨率有限,旋转插值会导致高重采样误差。但对于某些需要RoI特征的下游任务而言,物体分类损失仍可能是有用的。
4. 2D投影
实验表明,3D监督已经提供足够信息,使用2D监督不能提高性能。但当3D监督不存在时,2D投影损失仍可能有用。