系列文章目录
《计算机视觉技术与应用》-----第二章 图像处理基础
《计算机视觉技术与应用》-----第三章 图形用户界面
《计算机视觉技术与应用》-----第四章 图像变换
《计算机视觉技术与应用》-----第五章 边缘和轮廓
《计算机视觉技术与应用》-----第六章 边缘和轮廓
《计算机视觉技术与应用》-----第七章 边缘和轮廓
《计算机视觉技术与应用》----- 重点复盘
文章目录
- 系列文章目录
- 前言
- 一、重点掌握
- 第一章 OpenCV起步
- 第二章 图像处理基础
- 第三章 图形用户界面
- 第四章 图像变换
- 第五章 边缘和轮廓
- 第六章 直方图
- 第七章 模版匹配和图像分割
- 第八章 特征检测
- 二、编程题
- 第二章习题
- 第五章习题
- 总结
前言
一、重点掌握
填空(15个题),判断(10个题),简答(1个题)共60分。
第一章 OpenCV起步
- 安装安装opencv-python的命令是pip install opencv-python。
- 安装Numpy命令是pip install Numpy。
第二章 图像处理基础
- 在Python程序中,OpenCV使用NumPy数组来存储图像。 OpenCV默认的图像格式为BGR,即3通道图像数组的3个维度依次为B(蓝色)、G(绿色)和R(红色)通道的像素。
- 使用zeros()函数创建数组,数组元素默认值是0。
- img.shape的输出结果为(512,512,3),说明表示彩色图像的一个三维数组,3个值依次表示图像的高度、宽度和通道数;图像的分辨率为512x512。
- OpenCV播放视频的实质是逐帧读取和显示图像。 通常,计算机将灰度处理为256级,0表示黑色,255表示白色。
cv2.split()函数用于拆分通道。 - 在图像处理基础中,加法运算符“+”和cv2.add()函数的区别?
答:用“+”运算符执行两个图像数组加法时,如果两个像素相加大于256,则会将其按256取模。cv2.add()函数执行两个图像数组加法时,如果两个像素相加大于256,则取255。
第三章 图形用户界面
- 绘制矩形的函数是cv2.rectangle() ,绘制圆的函数是cv2.circle()。
- 绘制椭圆的函数是cv2.ellipse()。
- 绘制文本的函数是cv2.putText()。
第四章 图像变换
- cv2.COLOR_BGR2RGB:将BGR色彩空间转换为RGB色彩空间。
- GRAY色彩空间通常指8位灰度图像,其颜色取值范围是**[0,256]** 。
- YCrCb色彩空间用亮度Y、红色Cr和蓝色Cb表示图像。
- 图像翻转函数是cv2.flip()。
- HSV色彩空间使用色调、饱和度和亮度表示图像。
- 仿射变换包含了平移、旋转、缩放等操作。
- 图像模糊主要目的是消除图像噪声和边缘。
- 均值滤波是指以当前点为中心,用其周围N x N个点像素值的平均值代替当前点的像素值。
- 中值滤波是取中间值作为邻域中心点的像素值。
- 开运算先将图像执行腐蚀操作,再对腐蚀结果执行膨胀操作。
第五章 边缘和轮廓
- 图像的边缘是指图像中灰度值发生急剧变化的位置,边缘检测的目的是为了绘制出边缘线条。
- 边缘检测的结果通常为黑白图像,图像中的白色线条表示边缘。
第六章 直方图
- 直方图横坐标表示图像像素的灰度级,纵坐标表示像素灰度级的数量。
- 二维直方图统计像素的色相和饱和度,用于查找图像的颜色直方图。
第七章 模版匹配和图像分割
- 模板匹配是指在当前图像中查找与目标图像相近的部分。图像分割是指将前景对象从图像中分割或提取出来。
- 单目标匹配是指输入图像中只存在一个可能匹配结果。
第八章 特征检测
- ORB特征检测以FAST特征检测器和BRIEF描述符为基础进行了改进,以获得更好的特征检测性能。
FAST特征检测器主要根据像素周围16个像素的强度和阈值参数来判断像素是否为关键点。
二、编程题
两个编程题,共40分。
第二章习题
```python
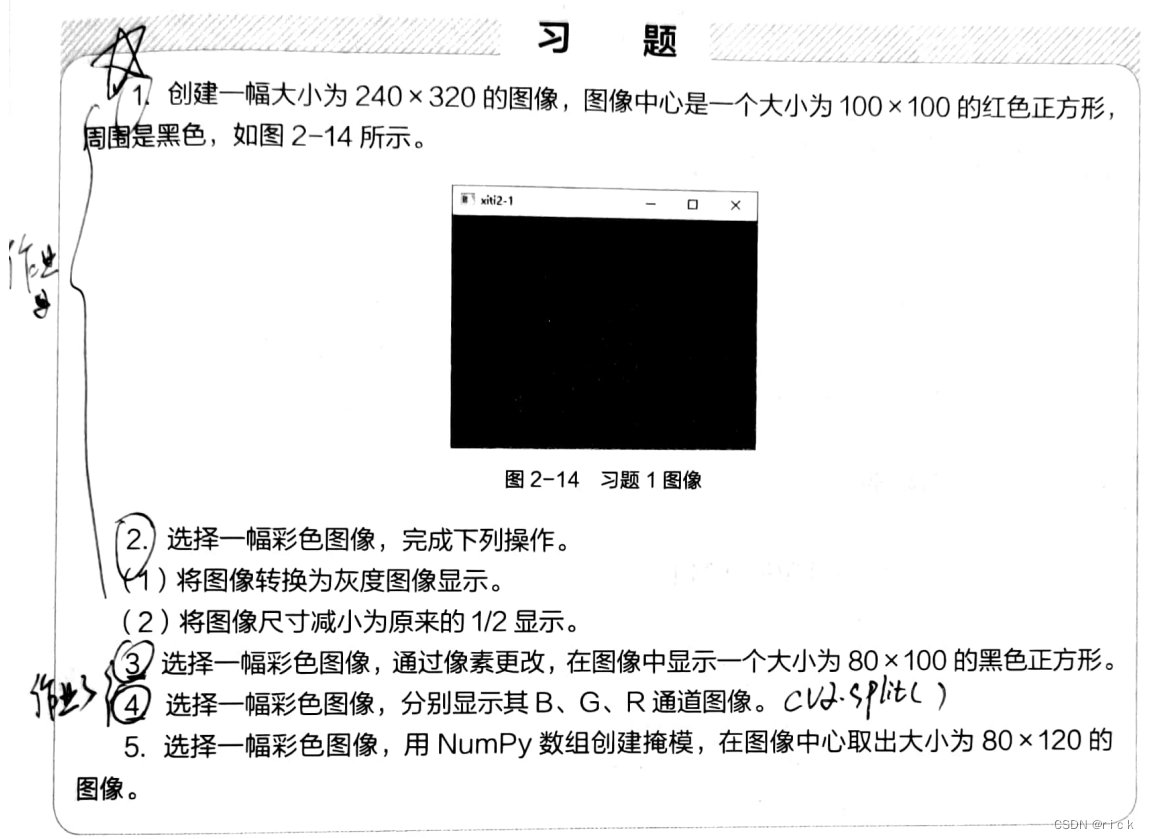
#习题2-1.py:创建一幅大小为240×320的图像,图像中心是一个大小为100×100的红色正方形,周围是黑色
import cv2
import numpy
img = numpy.zeros((240,320,3),dtype=numpy.uint8) #创建黑色背景
img[70:170,110:210,2]=255 #创建红色区域(100*100)
cv2.imshow('xiti2-1',img)
cv2.waitKey(0)
#习题2-2.py:选择一幅彩色图像,完成下列操作:
#(1)将图像转换为灰度图像显示。
#(2)将图像尺寸减小为原来的1/2显示。
import cv2
img=cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)#(1)将彩色图像转换为灰度图像
cv2.imshow('GRASCALE',img)
img=cv2.imread('lena.jpg',cv2.IMREAD_REDUCED_COLOR_2)#(2)将图像尺寸缩小为原来的1/2
cv2.imshow('COLOR_2',img)
cv2.waitKey(0)
cv2.waitKey(0)
#习题2-3.py:选择一幅彩色图像,通过像素更改,在图像中显示一个大小为80×100的黑色正方形。
import cv2
img=cv2.imread('lena.jpg')
h,w,s=img.shape #得到原图的高宽通道
h1=int(h/2) #获取原图高度的一半,并且强制转换为int
w1=int(w/2)
img[h1-40:h1+40,w1-50:w1+50,:]=0 #也可以直接通过像素区域打码 在img中 img[::]=255
cv2.imshow('xiugai',img)
cv2.waitKey(0)
#习题2-4.py:选择一幅彩色图像,分别显示其B、G、R通道图像。
import cv2
img = cv2.imread('lena.jpg')
cv2.imshow('lena',img)
b,g,r=cv2.split(img)#重点
cv2.imshow('lena-b',b)
cv2.imshow('lena-g',g)
cv2.imshow('lena-r',r)
cv2.waitKey(0)
#习题2-5.py:选择一幅彩色图像,用NumPy数组创建掩模,在图像中心取出大小为80×120的图像。
import cv2
import numpy
src1 = cv2.imread('lena.jpg')
h,w,s=src1.shape
img = numpy.zeros((h,w,s),dtype=numpy.uint8) #创建黑色背景
h1=int(h/2)
w1=int(w/2)
img[h1-40:h1+40,w1-60:w1+60,:]=255
img2=cv2.bitwise_and(src1,img) #题目要求是用Numpy数组创建掩膜的方式打码 img[10:90,20:120,:]=255
cv2.imshow('yanmo',img2)
cv2.waitKey(0)
第五章习题
#习题5-1 选择一幅图像,对其执行Laplacian边缘检测
import cv2
img = cv2.imread('bee.jpg')
cv2.imshow('original',img)
#Laplacian边缘检测
img2 = cv2.Laplacian(img,cv2.CV_8U,ksize=1)
cv2.imshow('L',img2)
cv2.waitKey(0)
#习题5-2 选择一幅图像,对其执行Sobel边缘检测
import cv2
img = cv2.imread('bee.jpg')
cv2.imshow('original',img)
#Sobel边缘检测
img3 = cv2.Sobel(img,cv2.CV_8U,0,1) #0表示对x不求偏导,1表示对y偏导 dx>=0 && dy>=0 && dx+dy>0
cv2.imshow('C',img3)
cv2.waitKey(0)
#习题5-3 选择一幅图像,对其执行Canny边缘检测
import cv2
img = cv2.imread('bee.jpg')
cv2.imshow('original',img)
#Canny边缘检测
img4 = cv2.Canny(img,100,200,apertureSize=3)
cv2.imshow('Canny',img4)
cv2.waitKey(0)
#test5-4.py:查找和绘制轮廓
#先查找后绘制,前7行代码与查找轮廓代码一致
import cv2
import numpy as np
img=cv2.imread('shapes.jpg') #读取图像
cv2.imshow('original',img) #显示原图像
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#转化为灰度图像
ret,img2=cv2.threshold(gray,125,255,cv2.THRESH_BINARY)#二值化阈值处理
c,h=cv2.findContours(img2,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
img3=np.zeros(img.shape, np.uint8)+255 #按原图大小创建一幅白色图像
#image=cv2.drawContours(image,contours,contourIdx,color,thickness)
#image:原图
#contours为要绘制的轮廓
img3=cv2.drawContours(img3,c,-1,(0,0,255),2) #绘制轮廓 -1表示绘制所有轮廓
cv2.imshow('Contours',img3) #显示轮廓图像
cv2.waitKey(0) #按任意键结束等待
cv2.destroyAllWindows() #关闭所有窗口