目录
1 在设备树中描述网卡中断
2 dm9dev9000c.c
3 在设备树中描述触摸屏中断
1 在设备树中描述网卡中断
srom-cs4@20000000 {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
reg = <0x20000000 0x8000000>;
ranges;
ethernet@20000000 {
compatible = "davicom,dm9000";
reg = <0x20000000 0x2 0x20000004 0x2>;
interrupt-parent = <&gpf>;
interrupts = <7 IRQ_TYPE_EDGE_RISING>;
local-mac-address = [00 00 de ad be ef];
davicom,no-eeprom;
};
};ethernet@2000000节点位于srom-cs4@20000000节点下面,srom-cs4@20000000节点的属性是simple-bus,对于simple-bus下面的子节点,他也会被创建为一个平台设备,它的平台设备里面compatible是"davicom,dm9000",我们以后将会根据这个值来找到他对应的驱动程序,然后我们需要修改驱动程序,为这个设备节点添加一个platform-driver,在platform-driver的probe函数里面把中断号7给确定下来。
2 dm9dev9000c.c
我们可以参考之前的按键驱动来修改,
static const struct of_device_id of_match_buttons[] = {
{ .compatible = "jz2440_button", .data = NULL },
{ /* sentinel */ }
};
struct platform_driver buttons_drv = {
.probe = buttons_probe,
.remove = buttons_remove,
.driver = {
.name = "mybuttons",
.of_match_table = of_match_buttons, /* 能支持哪些来自于dts的platform_device */
}
};
static int buttons_init(void)
{
platform_driver_register(&buttons_drv);
return 0;
}
static void buttons_exit(void)
{
platform_driver_unregister(&buttons_drv);
}
module_init(buttons_init);
module_exit(buttons_exit);
MODULE_LICENSE("GPL");我们修改成下面的代码
static const struct of_device_id of_match_dm9000[] = {
{ .compatible = "davicom,dm9000", .data = NULL },
{ /* sentinel */ }
};
struct platform_driver dm9000_drv = {
.probe = dm9000drv_probe,
.remove = dm9000drv_remove,
.driver = {
.name = "dm9000",
.of_match_table = of_match_dm9000, /* 能支持哪些来自于dts的platform_device */
}
};
static int dm9000drv_init(void)
{
platform_driver_register(&dm9000_drv);
return 0;
}
static void dm9000drv_exit(void)
{
platform_driver_unregister(&dm9000_drv);
}
module_init(dm9000drv_init);
module_exit(dm9000drv_exit);
MODULE_LICENSE("GPL");接下来我们要实现dm9000drv_probe,然后在这个函数里面确定中断号并调用之前的入口函数,我们仍然仿照之前按键的probe函数
static int buttons_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct device_node *dp_node = dev->of_node;
struct resource *res;
int i;
for (i = 0; i < sizeof(pins_desc)/sizeof(pins_desc[0]); i++)
{
/* 根据platform_device的资源进行获得中断号,触发类型 */
res = platform_get_resource(pdev, IORESOURCE_IRQ, i);
if (res) {
pins_desc[i].irq = res->start;
printk("get irq %d\n", pins_desc[i].irq);
}
else {
printk("can not get irq res for eint0\n");
return -1;
}
pins_desc[i].pin = of_get_named_gpio(dp_node, "eint-pins", i);
printk("pins_desc[%d].pin = %d\n", i, pins_desc[i].pin);
}
return sixth_drv_init();
}
static int buttons_remove(struct platform_device *pdev)
{
sixth_drv_exit();
return 0;
}改成下面的样子
static int dm9000drv_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct device_node *dp_node = dev->of_node;
struct resource *res;
int i;
res = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
if (res) {
irq = res->start;
printk("get dm9000 irq %d\n", irq);
}
else {
printk("can not get irq res for dm9000\n");
return -1;
}
return dm9000c_init();
}修改后的完整的dm9dev9000c.c如下
/*
dm9ks.c: Version 2.08 2007/02/12
A Davicom DM9000/DM9010 ISA NIC fast Ethernet driver for Linux.
This program is free software; you can redistribute it and/or
modify it under the terms of the GNU General Public License
as published by the Free Software Foundation; either version 2
of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
(C)Copyright 1997-2007 DAVICOM Semiconductor,Inc. All Rights Reserved.
V2.00 Spenser - 01/10/2005
- Modification for PXA270 MAINSTONE.
- Modified dmfe_tx_done().
- Add dmfe_timeout().
V2.01 10/07/2005 -Modified dmfe_timer()
-Dected network speed 10/100M
V2.02 10/12/2005 -Use link change to chage db->Speed
-dmfe_open() wait for Link OK
V2.03 11/22/2005 -Power-off and Power-on PHY in dmfe_init_dm9000()
-support IOL
V2.04 12/13/2005 -delay 1.6s between power-on and power-off in
dmfe_init_dm9000()
-set LED mode 1 in dmfe_init_dm9000()
-add data bus driving capability in dmfe_init_dm9000()
(optional)
10/3/2006 -Add DM8606 read/write function by MDC and MDIO
V2.06 01/03/2007 -CONT_RX_PKT_CNT=0xFFFF
-modify dmfe_tx_done function
-check RX FIFO pointer
-if using physical address, re-define I/O function
-add db->cont_rx_pkt_cnt=0 at the front of dmfe_packet_receive()
V2.08 02/12/2007 -module parameter macro
2.4 MODULE_PARM
2.6 module_param
-remove #include <linux/config>
-fix dmfe_interrupt for kernel 2.6.20
V2.09 05/24/2007 -support ethtool and mii-tool
05/30/2007 -fix the driver bug when ifconfig eth0 (-)promisc and (-)allmulti.
06/05/2007 -fix dm9000b issue(ex. 10M TX idle=65mA, 10M harmonic)
-add flow control function (option)
10/01/2007 -Add #include <asm/uaccess.h>
-Modyfy dmfe_do_ioctl for kernel 2.6.7
11/23/2007 -Add TDBUG to check TX FIFO pointer shift
- Remove check_rx_ready()
- Add #define CHECKSUM to modify CHECKSUM function
12/20/2007 -Modify TX timeout routine(+)check TCR&0x01
*/
//#define CHECKSUM
//#define TDBUG /* check TX FIFO pointer */
//#define RDBUG /* check RX FIFO pointer */
//#define DM8606
#define DRV_NAME "dm9KS"
#define DRV_VERSION "2.09"
#define DRV_RELDATE "2007-11-22"
#ifdef MODVERSIONS
#include <linux/modversions.h>
#endif
//#include <linux/config.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/module.h>
#include <linux/ioport.h>
#include <linux/netdevice.h>
#include <linux/etherdevice.h>
#include <linux/skbuff.h>
#include <linux/version.h>
#include <asm/dma.h>
#include <linux/spinlock.h>
#include <linux/crc32.h>
#include <linux/mii.h>
#include <linux/ethtool.h>
#include <asm/uaccess.h>
#include <linux/interrupt.h>
#ifdef CONFIG_ARCH_MAINSTONE
#include <asm/io.h>
#include <asm/hardware.h>
#include <asm/irq.h>
#endif
#include <asm/delay.h>
#include <asm/irq.h>
#include <asm/io.h>
//#include <asm/arch-s3c2410/regs-mem.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/of_platform.h>
#include "dm9000.h"
/* Board/System/Debug information/definition ---------------- */
#define DM9KS_ID 0x90000A46
#define DM9010_ID 0x90100A46
/*-------register name-----------------------*/
#define DM9KS_NCR 0x00 /* Network control Reg.*/
#define DM9KS_NSR 0x01 /* Network Status Reg.*/
#define DM9KS_TCR 0x02 /* TX control Reg.*/
#define DM9KS_RXCR 0x05 /* RX control Reg.*/
#define DM9KS_BPTR 0x08
#define DM9KS_FCTR 0x09
#define DM9KS_FCR 0x0a
#define DM9KS_EPCR 0x0b
#define DM9KS_EPAR 0x0c
#define DM9KS_EPDRL 0x0d
#define DM9KS_EPDRH 0x0e
#define DM9KS_GPR 0x1f /* General purpose register */
#define DM9KS_CHIPR 0x2c
#define DM9KS_TCR2 0x2d
#define DM9KS_SMCR 0x2f /* Special Mode Control Reg.*/
#define DM9KS_ETXCSR 0x30 /* Early Transmit control/status Reg.*/
#define DM9KS_TCCR 0x31 /* Checksum cntrol Reg. */
#define DM9KS_RCSR 0x32 /* Receive Checksum status Reg.*/
#define DM9KS_BUSCR 0x38
#define DM9KS_MRCMDX 0xf0
#define DM9KS_MRCMD 0xf2
#define DM9KS_MDRAL 0xf4
#define DM9KS_MDRAH 0xf5
#define DM9KS_MWCMD 0xf8
#define DM9KS_MDWAL 0xfa
#define DM9KS_MDWAH 0xfb
#define DM9KS_TXPLL 0xfc
#define DM9KS_TXPLH 0xfd
#define DM9KS_ISR 0xfe
#define DM9KS_IMR 0xff
/*---------------------------------------------*/
#define DM9KS_REG05 0x30 /* SKIP_CRC/SKIP_LONG */
#define DM9KS_REGFF 0xA3 /* IMR */
#define DM9KS_DISINTR 0x80
#define DM9KS_PHY 0x40 /* PHY address 0x01 */
#define DM9KS_PKT_RDY 0x01 /* Packet ready to receive */
/* Added for PXA of MAINSTONE */
#ifdef CONFIG_ARCH_MAINSTONE
#include <asm/arch/mainstone.h>
#define DM9KS_MIN_IO (MST_ETH_PHYS + 0x300)
#define DM9KS_MAX_IO (MST_ETH_PHYS + 0x370)
#define DM9K_IRQ MAINSTONE_IRQ(3)
#else
#define DM9KS_MIN_IO 0x300
#define DM9KS_MAX_IO 0x370
#define DM9KS_IRQ 3
#endif
#define DM9KS_VID_L 0x28
#define DM9KS_VID_H 0x29
#define DM9KS_PID_L 0x2A
#define DM9KS_PID_H 0x2B
#define DM9KS_RX_INTR 0x01
#define DM9KS_TX_INTR 0x02
#define DM9KS_LINK_INTR 0x20
#define DM9KS_DWORD_MODE 1
#define DM9KS_BYTE_MODE 2
#define DM9KS_WORD_MODE 0
#define TRUE 1
#define FALSE 0
/* Number of continuous Rx packets */
#define CONT_RX_PKT_CNT 0xFFFF
#define DMFE_TIMER_WUT jiffies+(HZ*5) /* timer wakeup time : 5 second */
#ifdef DM9KS_DEBUG
#define DMFE_DBUG(dbug_now, msg, vaule)\
if (dmfe_debug||dbug_now) printk(KERN_ERR "dmfe: %s %x\n", msg, vaule)
#else
#define DMFE_DBUG(dbug_now, msg, vaule)\
if (dbug_now) printk(KERN_ERR "dmfe: %s %x\n", msg, vaule)
#endif
#ifndef CONFIG_ARCH_MAINSTONE
#pragma pack(push, 1)
#endif
typedef struct _RX_DESC
{
u8 rxbyte;
u8 status;
u16 length;
}RX_DESC;
typedef union{
u8 buf[4];
RX_DESC desc;
} rx_t;
#ifndef CONFIG_ARCH_MAINSTONE
#pragma pack(pop)
#endif
enum DM9KS_PHY_mode {
DM9KS_10MHD = 0,
DM9KS_100MHD = 1,
DM9KS_10MFD = 4,
DM9KS_100MFD = 5,
DM9KS_AUTO = 8,
};
/* Structure/enum declaration ------------------------------- */
typedef struct board_info {
u32 io_addr;/* Register I/O base address */
u32 io_data;/* Data I/O address */
u8 op_mode;/* PHY operation mode */
u8 io_mode;/* 0:word, 2:byte */
u8 Speed; /* current speed */
u8 chip_revision;
int rx_csum;/* 0:disable, 1:enable */
u32 reset_counter;/* counter: RESET */
u32 reset_tx_timeout;/* RESET caused by TX Timeout */
int tx_pkt_cnt;
int cont_rx_pkt_cnt;/* current number of continuos rx packets */
struct net_device_stats stats;
struct timer_list timer;
unsigned long timer_data;
unsigned char srom[128];
spinlock_t lock;
struct mii_if_info mii;
} board_info_t;
/* Global variable declaration ----------------------------- */
/*static int dmfe_debug = 0;*/
static struct net_device * dmfe_dev = NULL;
static struct ethtool_ops dmfe_ethtool_ops;
/* For module input parameter */
static int mode = DM9KS_AUTO;
static int media_mode = DM9KS_AUTO;
static int irq = DM9KS_IRQ;
static int iobase = DM9KS_MIN_IO;
#if 0 // use physical address; Not virtual address
#ifdef outb
#undef outb
#endif
#ifdef outw
#undef outw
#endif
#ifdef outl
#undef outl
#endif
#ifdef inb
#undef inb
#endif
#ifdef inw
#undef inw
#endif
#ifdef inl
#undef inl
#endif
void outb(u8 reg, u32 ioaddr)
{
(*(volatile u8 *)(ioaddr)) = reg;
}
void outw(u16 reg, u32 ioaddr)
{
(*(volatile u16 *)(ioaddr)) = reg;
}
void outl(u32 reg, u32 ioaddr)
{
(*(volatile u32 *)(ioaddr)) = reg;
}
u8 inb(u32 ioaddr)
{
return (*(volatile u8 *)(ioaddr));
}
u16 inw(u32 ioaddr)
{
return (*(volatile u16 *)(ioaddr));
}
u32 inl(u32 ioaddr)
{
return (*(volatile u32 *)(ioaddr));
}
#endif
/* function declaration ------------------------------------- */
int dmfe_probe1(struct net_device *);
static int dmfe_open(struct net_device *);
static int dmfe_start_xmit(struct sk_buff *, struct net_device *);
static void dmfe_tx_done(unsigned long);
static void dmfe_packet_receive(struct net_device *);
static int dmfe_stop(struct net_device *);
static struct net_device_stats * dmfe_get_stats(struct net_device *);
static int dmfe_do_ioctl(struct net_device *, struct ifreq *, int);
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
static void dmfe_interrupt(int , void *, struct pt_regs *);
#else
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,6,19)
static irqreturn_t dmfe_interrupt(int , void *, struct pt_regs *);
#else
static irqreturn_t dmfe_interrupt(int irq, void *dev_id);/* for kernel 2.6.20 */
#endif
#endif
static void dmfe_timer(struct timer_list *t);
static void dmfe_init_dm9000(struct net_device *);
static unsigned long cal_CRC(unsigned char *, unsigned int, u8);
u8 ior(board_info_t *, int);
void iow(board_info_t *, int, u8);
static u16 phy_read(board_info_t *, int);
static void phy_write(board_info_t *, int, u16);
static u16 read_srom_word(board_info_t *, int);
static void dm9000_hash_table(struct net_device *);
static void dmfe_timeout(struct net_device *);
static void dmfe_reset(struct net_device *);
static int mdio_read(struct net_device *, int, int);
static void mdio_write(struct net_device *, int, int, int);
static void dmfe_get_drvinfo(struct net_device *, struct ethtool_drvinfo *);
static int dmfe_get_settings(struct net_device *, struct ethtool_cmd *);
static int dmfe_set_settings(struct net_device *, struct ethtool_cmd *);
static u32 dmfe_get_link(struct net_device *);
static int dmfe_nway_reset(struct net_device *);
static uint32_t dmfe_get_rx_csum(struct net_device *);
static uint32_t dmfe_get_tx_csum(struct net_device *);
static int dmfe_set_rx_csum(struct net_device *, uint32_t );
static int dmfe_set_tx_csum(struct net_device *, uint32_t );
#ifdef DM8606
#include "dm8606.h"
#endif
//DECLARE_TASKLET(dmfe_tx_tasklet,dmfe_tx_done,0);
/* DM9000 network baord routine ---------------------------- */
/*
Search DM9000 board, allocate space and register it
*/
struct net_device * __init dmfe_probe(void)
{
struct net_device *dev;
int err;
DMFE_DBUG(0, "dmfe_probe()",0);
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
dev = init_etherdev(NULL, sizeof(struct board_info));
//ether_setup(dev);
#else
dev= alloc_etherdev(sizeof(struct board_info));
#endif
if(!dev)
return ERR_PTR(-ENOMEM);
//SET_MODULE_OWNER(dev);
err = dmfe_probe1(dev);
if (err)
goto out;
#if LINUX_VERSION_CODE > KERNEL_VERSION(2,5,0)
err = register_netdev(dev);
if (err)
goto out1;
#endif
return dev;
out1:
release_region(dev->base_addr,2);
out:
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
kfree(dev);
#else
free_netdev(dev);
#endif
return ERR_PTR(err);
}
static const struct net_device_ops dm9k_netdev_ops = {
.ndo_open = dmfe_open,
.ndo_stop = dmfe_stop,
.ndo_start_xmit = dmfe_start_xmit,
.ndo_tx_timeout = dmfe_timeout,
.ndo_set_rx_mode = dm9000_hash_table,
.ndo_do_ioctl = dmfe_do_ioctl,
.ndo_change_mtu = eth_change_mtu,
.ndo_get_stats = dmfe_get_stats,
//.ndo_set_features = dm9000_set_features,
.ndo_validate_addr = eth_validate_addr,
.ndo_set_mac_address = eth_mac_addr,
#ifdef CONFIG_NET_POLL_CONTROLLER
.ndo_poll_controller = dm9000_poll_controller,
#endif
};
int __init dmfe_probe1(struct net_device *dev)
{
struct board_info *db; /* Point a board information structure */
u32 id_val;
u16 i, dm9000_found = FALSE;
u8 MAC_addr[6]={0x00,0x60,0x6E,0x33,0x44,0x55};
u8 HasEEPROM=0,chip_info;
DMFE_DBUG(0, "dmfe_probe1()",0);
/* Search All DM9000 serial NIC */
do {
outb(DM9KS_VID_L, iobase); /* DM9000C的索引寄存器(cmd引脚为0) */
id_val = inb(iobase + 4); /* 读DM9000C的数据寄存器(cmd引脚为1) */
outb(DM9KS_VID_H, iobase);
id_val |= inb(iobase + 4) << 8;
outb(DM9KS_PID_L, iobase);
id_val |= inb(iobase + 4) << 16;
outb(DM9KS_PID_H, iobase);
id_val |= inb(iobase + 4) << 24;
if (id_val == DM9KS_ID || id_val == DM9010_ID) {
/* Request IO from system */
if(!request_region(iobase, 2, dev->name))
return -ENODEV;
printk(KERN_ERR"<DM9KS> I/O: %x, VID: %x \n",iobase, id_val);
dm9000_found = TRUE;
/* Allocated board information structure */
db = netdev_priv(dev);
memset(db, 0, sizeof(struct board_info));
dmfe_dev = dev;
db->io_addr = iobase;
db->io_data = iobase + 4;
db->chip_revision = ior(db, DM9KS_CHIPR);
chip_info = ior(db,0x43);
/* thisway.diy@163.com */
//if((db->chip_revision!=0x1A) || ((chip_info&(1<<5))!=0) || ((chip_info&(1<<2))!=1)) return -ENODEV;
/* driver system function */
dev->netdev_ops = &dm9k_netdev_ops;
dev->base_addr = iobase;
dev->irq = irq;
//dev->open = &dmfe_open;
//dev->hard_start_xmit = &dmfe_start_xmit;
dev->watchdog_timeo = 5*HZ;
//dev->tx_timeout = dmfe_timeout;
//dev->stop = &dmfe_stop;
//dev->get_stats = &dmfe_get_stats;
//dev->set_multicast_list = &dm9000_hash_table;
//dev->do_ioctl = &dmfe_do_ioctl;
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,4,28)
dev->ethtool_ops = &dmfe_ethtool_ops;
#endif
#ifdef CHECKSUM
//dev->features |= NETIF_F_IP_CSUM;
dev->features |= NETIF_F_IP_CSUM|NETIF_F_SG;
#endif
db->mii.dev = dev;
db->mii.mdio_read = mdio_read;
db->mii.mdio_write = mdio_write;
db->mii.phy_id = 1;
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,4,20)
db->mii.phy_id_mask = 0x1F;
db->mii.reg_num_mask = 0x1F;
#endif
//db->msg_enable =(debug == 0 ? DMFE_DEF_MSG_ENABLE : ((1 << debug) - 1));
/* Read SROM content */
for (i=0; i<64; i++)
((u16 *)db->srom)[i] = read_srom_word(db, i);
/* Get the PID and VID from EEPROM to check */
id_val = (((u16 *)db->srom)[4])|(((u16 *)db->srom)[5]<<16);
printk("id_val=%x\n", id_val);
if (id_val == DM9KS_ID || id_val == DM9010_ID)
HasEEPROM =1;
/* Set Node Address */
for (i=0; i<6; i++)
{
if (HasEEPROM) /* use EEPROM */
dev->dev_addr[i] = db->srom[i];
else /* No EEPROM */
dev->dev_addr[i] = MAC_addr[i];
}
}//end of if()
iobase += 0x10;
}while(!dm9000_found && iobase <= DM9KS_MAX_IO);
return dm9000_found ? 0:-ENODEV;
}
/*
Open the interface.
The interface is opened whenever "ifconfig" actives it.
*/
static int dmfe_open(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
u8 reg_nsr;
int i;
DMFE_DBUG(0, "dmfe_open", 0);
/* thisway.diy@163.com */
if (request_irq(dev->irq,&dmfe_interrupt, IRQF_TRIGGER_RISING,dev->name,dev))
return -EAGAIN;
/* Initilize DM910X board */
dmfe_init_dm9000(dev);
#ifdef DM8606
// control DM8606
printk("[8606]reg0=0x%04x\n",dm8606_read(db,0));
printk("[8606]reg1=0x%04x\n",dm8606_read(db,0x1));
#endif
/* Init driver variable */
db->reset_counter = 0;
db->reset_tx_timeout = 0;
db->cont_rx_pkt_cnt = 0;
/* check link state and media speed */
db->Speed =10;
i=0;
do {
reg_nsr = ior(db,DM9KS_NSR);
if(reg_nsr & 0x40) /* link OK!! */
{
/* wait for detected Speed */
mdelay(200);
reg_nsr = ior(db,DM9KS_NSR);
if(reg_nsr & 0x80)
db->Speed =10;
else
db->Speed =100;
break;
}
i++;
mdelay(1);
}while(i<3000); /* wait 3 second */
//printk("i=%d Speed=%d\n",i,db->Speed);
/* set and active a timer process */
//init_timer(&db->timer);
timer_setup(&db->timer, dmfe_timer, 0);
db->timer.expires = DMFE_TIMER_WUT;
db->timer_data = (unsigned long)dev;
// db->timer.function = &dmfe_timer;
add_timer(&db->timer); //Move to DM9000 initiallization was finished.
netif_start_queue(dev);
return 0;
}
/* Set PHY operationg mode
*/
static void set_PHY_mode(board_info_t *db)
{
#ifndef DM8606
u16 phy_reg0 = 0x1000;/* Auto-negotiation*/
u16 phy_reg4 = 0x01e1;
if ( !(db->op_mode & DM9KS_AUTO) ) // op_mode didn't auto sense */
{
switch(db->op_mode) {
case DM9KS_10MHD: phy_reg4 = 0x21;
phy_reg0 = 0x1000;
break;
case DM9KS_10MFD: phy_reg4 = 0x41;
phy_reg0 = 0x1100;
break;
case DM9KS_100MHD: phy_reg4 = 0x81;
phy_reg0 = 0x3000;
break;
case DM9KS_100MFD: phy_reg4 = 0x101;
phy_reg0 = 0x3100;
break;
default:
break;
} // end of switch
} // end of if
#ifdef FLOW_CONTROL
phy_write(db, 4, phy_reg4|(1<<10));
#else
phy_write(db, 4, phy_reg4);
#endif //end of FLOW_CONTROL
phy_write(db, 0, phy_reg0|0x200);
#else
/* Fiber mode */
phy_write(db, 16, 0x4014);
phy_write(db, 0, 0x2100);
#endif //end of DM8606
if (db->chip_revision == 0x1A)
{
//set 10M TX idle =65mA (TX 100% utility is 160mA)
phy_write(db,20, phy_read(db,20)|(1<<11)|(1<<10));
//:fix harmonic
//For short code:
//PHY_REG 27 (1Bh) <- 0000h
phy_write(db, 27, 0x0000);
//PHY_REG 27 (1Bh) <- AA00h
phy_write(db, 27, 0xaa00);
//PHY_REG 27 (1Bh) <- 0017h
phy_write(db, 27, 0x0017);
//PHY_REG 27 (1Bh) <- AA17h
phy_write(db, 27, 0xaa17);
//PHY_REG 27 (1Bh) <- 002Fh
phy_write(db, 27, 0x002f);
//PHY_REG 27 (1Bh) <- AA2Fh
phy_write(db, 27, 0xaa2f);
//PHY_REG 27 (1Bh) <- 0037h
phy_write(db, 27, 0x0037);
//PHY_REG 27 (1Bh) <- AA37h
phy_write(db, 27, 0xaa37);
//PHY_REG 27 (1Bh) <- 0040h
phy_write(db, 27, 0x0040);
//PHY_REG 27 (1Bh) <- AA40h
phy_write(db, 27, 0xaa40);
//For long code:
//PHY_REG 27 (1Bh) <- 0050h
phy_write(db, 27, 0x0050);
//PHY_REG 27 (1Bh) <- AA50h
phy_write(db, 27, 0xaa50);
//PHY_REG 27 (1Bh) <- 006Bh
phy_write(db, 27, 0x006b);
//PHY_REG 27 (1Bh) <- AA6Bh
phy_write(db, 27, 0xaa6b);
//PHY_REG 27 (1Bh) <- 007Dh
phy_write(db, 27, 0x007d);
//PHY_REG 27 (1Bh) <- AA7Dh
phy_write(db, 27, 0xaa7d);
//PHY_REG 27 (1Bh) <- 008Dh
phy_write(db, 27, 0x008d);
//PHY_REG 27 (1Bh) <- AA8Dh
phy_write(db, 27, 0xaa8d);
//PHY_REG 27 (1Bh) <- 009Ch
phy_write(db, 27, 0x009c);
//PHY_REG 27 (1Bh) <- AA9Ch
phy_write(db, 27, 0xaa9c);
//PHY_REG 27 (1Bh) <- 00A3h
phy_write(db, 27, 0x00a3);
//PHY_REG 27 (1Bh) <- AAA3h
phy_write(db, 27, 0xaaa3);
//PHY_REG 27 (1Bh) <- 00B1h
phy_write(db, 27, 0x00b1);
//PHY_REG 27 (1Bh) <- AAB1h
phy_write(db, 27, 0xaab1);
//PHY_REG 27 (1Bh) <- 00C0h
phy_write(db, 27, 0x00c0);
//PHY_REG 27 (1Bh) <- AAC0h
phy_write(db, 27, 0xaac0);
//PHY_REG 27 (1Bh) <- 00D2h
phy_write(db, 27, 0x00d2);
//PHY_REG 27 (1Bh) <- AAD2h
phy_write(db, 27, 0xaad2);
//PHY_REG 27 (1Bh) <- 00E0h
phy_write(db, 27, 0x00e0);
//PHY_REG 27 (1Bh) <- AAE0h
phy_write(db, 27, 0xaae0);
//PHY_REG 27 (1Bh) <- 0000h
phy_write(db, 27, 0x0000);
}
}
/*
Initilize dm9000 board
*/
static void dmfe_init_dm9000(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
DMFE_DBUG(0, "dmfe_init_dm9000()", 0);
spin_lock_init(&db->lock);
iow(db, DM9KS_GPR, 0); /* GPR (reg_1Fh)bit GPIO0=0 pre-activate PHY */
mdelay(20); /* wait for PHY power-on ready */
/* do a software reset and wait 20us */
iow(db, DM9KS_NCR, 3);
udelay(20); /* wait 20us at least for software reset ok */
iow(db, DM9KS_NCR, 3); /* NCR (reg_00h) bit[0] RST=1 & Loopback=1, reset on */
udelay(20); /* wait 20us at least for software reset ok */
/* I/O mode */
db->io_mode = ior(db, DM9KS_ISR) >> 6; /* ISR bit7:6 keeps I/O mode */
/* Set PHY */
db->op_mode = media_mode;
set_PHY_mode(db);
/* Program operating register */
iow(db, DM9KS_NCR, 0);
iow(db, DM9KS_TCR, 0); /* TX Polling clear */
iow(db, DM9KS_BPTR, 0x3f); /* Less 3kb, 600us */
iow(db, DM9KS_SMCR, 0); /* Special Mode */
iow(db, DM9KS_NSR, 0x2c); /* clear TX status */
iow(db, DM9KS_ISR, 0x0f); /* Clear interrupt status */
iow(db, DM9KS_TCR2, 0x80); /* Set LED mode 1 */
if (db->chip_revision == 0x1A){
/* Data bus current driving/sinking capability */
iow(db, DM9KS_BUSCR, 0x01); /* default: 2mA */
}
#ifdef FLOW_CONTROL
iow(db, DM9KS_BPTR, 0x37);
iow(db, DM9KS_FCTR, 0x38);
iow(db, DM9KS_FCR, 0x29);
#endif
#ifdef DM8606
iow(db,0x34,1);
#endif
if (dev->features & NETIF_F_HW_CSUM){
printk(KERN_INFO "DM9KS:enable TX checksum\n");
iow(db, DM9KS_TCCR, 0x07); /* TX UDP/TCP/IP checksum enable */
}
if (db->rx_csum){
printk(KERN_INFO "DM9KS:enable RX checksum\n");
iow(db, DM9KS_RCSR, 0x02); /* RX checksum enable */
}
#ifdef ETRANS
/*If TX loading is heavy, the driver can try to anbel "early transmit".
The programmer can tune the "Early Transmit Threshold" to get
the optimization. (DM9KS_ETXCSR.[1-0])
Side Effect: It will happen "Transmit under-run". When TX under-run
always happens, the programmer can increase the value of "Early
Transmit Threshold". */
iow(db, DM9KS_ETXCSR, 0x83);
#endif
/* Set address filter table */
dm9000_hash_table(dev);
/* Activate DM9000/DM9010 */
iow(db, DM9KS_IMR, DM9KS_REGFF); /* Enable TX/RX interrupt mask */
iow(db, DM9KS_RXCR, DM9KS_REG05 | 1); /* RX enable */
/* Init Driver variable */
db->tx_pkt_cnt = 0;
netif_carrier_on(dev);
}
/*
Hardware start transmission.
Send a packet to media from the upper layer.
*/
static int dmfe_start_xmit(struct sk_buff *skb, struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
char * data_ptr;
int i, tmplen;
u16 MDWAH, MDWAL;
#ifdef TDBUG /* check TX FIFO pointer */
u16 MDWAH1, MDWAL1;
u16 tx_ptr;
#endif
DMFE_DBUG(0, "dmfe_start_xmit", 0);
if (db->chip_revision != 0x1A)
{
if(db->Speed == 10)
{if (db->tx_pkt_cnt >= 1) return 1;}
else
{if (db->tx_pkt_cnt >= 2) return 1;}
}else
if (db->tx_pkt_cnt >= 2) return 1;
/* packet counting */
db->tx_pkt_cnt++;
db->stats.tx_packets++;
db->stats.tx_bytes+=skb->len;
if (db->chip_revision != 0x1A)
{
if (db->Speed == 10)
{if (db->tx_pkt_cnt >= 1) netif_stop_queue(dev);}
else
{if (db->tx_pkt_cnt >= 2) netif_stop_queue(dev);}
}else
if (db->tx_pkt_cnt >= 2) netif_stop_queue(dev);
/* Disable all interrupt */
iow(db, DM9KS_IMR, DM9KS_DISINTR);
MDWAH = ior(db,DM9KS_MDWAH);
MDWAL = ior(db,DM9KS_MDWAL);
/* Set TX length to reg. 0xfc & 0xfd */
iow(db, DM9KS_TXPLL, (skb->len & 0xff));
iow(db, DM9KS_TXPLH, (skb->len >> 8) & 0xff);
/* Move data to TX SRAM */
data_ptr = (char *)skb->data;
outb(DM9KS_MWCMD, db->io_addr); // Write data into SRAM trigger
switch(db->io_mode)
{
case DM9KS_BYTE_MODE:
for (i = 0; i < skb->len; i++)
outb((data_ptr[i] & 0xff), db->io_data);
break;
case DM9KS_WORD_MODE:
tmplen = (skb->len + 1) / 2;
for (i = 0; i < tmplen; i++)
outw(((u16 *)data_ptr)[i], db->io_data);
break;
case DM9KS_DWORD_MODE:
tmplen = (skb->len + 3) / 4;
for (i = 0; i< tmplen; i++)
outl(((u32 *)data_ptr)[i], db->io_data);
break;
}
#ifndef ETRANS
/* Issue TX polling command */
iow(db, DM9KS_TCR, 0x1); /* Cleared after TX complete*/
#endif
#ifdef TDBUG /* check TX FIFO pointer */
MDWAH1 = ior(db,DM9KS_MDWAH);
MDWAL1 = ior(db,DM9KS_MDWAL);
tx_ptr = (MDWAH<<8)|MDWAL;
switch (db->io_mode)
{
case DM9KS_BYTE_MODE:
tx_ptr += skb->len;
break;
case DM9KS_WORD_MODE:
tx_ptr += ((skb->len + 1) / 2)*2;
break;
case DM9KS_DWORD_MODE:
tx_ptr += ((skb->len+3)/4)*4;
break;
}
if (tx_ptr > 0x0bff)
tx_ptr -= 0x0c00;
if (tx_ptr != ((MDWAH1<<8)|MDWAL1))
printk("[dm9ks:TX FIFO ERROR\n");
#endif
/* Saved the time stamp */
// dev->trans_start = jiffies;
db->cont_rx_pkt_cnt =0;
/* Free this SKB */
dev_kfree_skb(skb);
/* Re-enable interrupt */
iow(db, DM9KS_IMR, DM9KS_REGFF);
return 0;
}
/*
Stop the interface.
The interface is stopped when it is brought.
*/
static int dmfe_stop(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
DMFE_DBUG(0, "dmfe_stop", 0);
/* deleted timer */
del_timer(&db->timer);
netif_stop_queue(dev);
/* free interrupt */
free_irq(dev->irq, dev);
/* RESET devie */
phy_write(db, 0x00, 0x8000); /* PHY RESET */
//iow(db, DM9KS_GPR, 0x01); /* Power-Down PHY */
iow(db, DM9KS_IMR, DM9KS_DISINTR); /* Disable all interrupt */
iow(db, DM9KS_RXCR, 0x00); /* Disable RX */
/* Dump Statistic counter */
#if FALSE
printk("\nRX FIFO OVERFLOW %lx\n", db->stats.rx_fifo_errors);
printk("RX CRC %lx\n", db->stats.rx_crc_errors);
printk("RX LEN Err %lx\n", db->stats.rx_length_errors);
printk("RESET %x\n", db->reset_counter);
printk("RESET: TX Timeout %x\n", db->reset_tx_timeout);
printk("g_TX_nsr %x\n", g_TX_nsr);
#endif
return 0;
}
static void dmfe_tx_done(unsigned long unused)
{
struct net_device *dev = dmfe_dev;
board_info_t *db = netdev_priv(dev);
int nsr;
DMFE_DBUG(0, "dmfe_tx_done()", 0);
nsr = ior(db, DM9KS_NSR);
if (nsr & 0x0c)
{
if(nsr & 0x04) db->tx_pkt_cnt--;
if(nsr & 0x08) db->tx_pkt_cnt--;
if(db->tx_pkt_cnt < 0)
{
printk(KERN_DEBUG "DM9KS:tx_pkt_cnt ERROR!!\n");
while(ior(db,DM9KS_TCR) & 0x1){}
db->tx_pkt_cnt = 0;
}
}else{
while(ior(db,DM9KS_TCR) & 0x1){}
db->tx_pkt_cnt = 0;
}
netif_wake_queue(dev);
return;
}
/*
DM9000 insterrupt handler
receive the packet to upper layer, free the transmitted packet
*/
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
static void dmfe_interrupt(int irq, void *dev_id, struct pt_regs *regs)
#else
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,6,19)
static irqreturn_t dmfe_interrupt(int irq, void *dev_id, struct pt_regs *regs)
#else
static irqreturn_t dmfe_interrupt(int irq, void *dev_id) /* for kernel 2.6.20*/
#endif
#endif
{
struct net_device *dev = dev_id;
board_info_t *db;
int int_status,i;
u8 reg_save;
DMFE_DBUG(0, "dmfe_interrupt()", 0);
/* A real interrupt coming */
db = netdev_priv(dev);
spin_lock(&db->lock);
/* Save previous register address */
reg_save = inb(db->io_addr);
/* Disable all interrupt */
iow(db, DM9KS_IMR, DM9KS_DISINTR);
/* Got DM9000/DM9010 interrupt status */
int_status = ior(db, DM9KS_ISR); /* Got ISR */
iow(db, DM9KS_ISR, int_status); /* Clear ISR status */
/* Link status change */
if (int_status & DM9KS_LINK_INTR)
{
netif_stop_queue(dev);
for(i=0; i<500; i++) /*wait link OK, waiting time =0.5s */
{
phy_read(db,0x1);
if(phy_read(db,0x1) & 0x4) /*Link OK*/
{
/* wait for detected Speed */
for(i=0; i<200;i++)
udelay(1000);
/* set media speed */
if(phy_read(db,0)&0x2000) db->Speed =100;
else db->Speed =10;
break;
}
udelay(1000);
}
netif_wake_queue(dev);
//printk("[INTR]i=%d speed=%d\n",i, (int)(db->Speed));
}
/* Received the coming packet */
if (int_status & DM9KS_RX_INTR)
dmfe_packet_receive(dev);
/* Trnasmit Interrupt check */
if (int_status & DM9KS_TX_INTR)
dmfe_tx_done(0);
if (db->cont_rx_pkt_cnt>=CONT_RX_PKT_CNT)
{
iow(db, DM9KS_IMR, 0xa2);
}
else
{
/* Re-enable interrupt mask */
iow(db, DM9KS_IMR, DM9KS_REGFF);
}
/* Restore previous register address */
outb(reg_save, db->io_addr);
spin_unlock(&db->lock);
#if LINUX_VERSION_CODE > KERNEL_VERSION(2,5,0)
return IRQ_HANDLED;
#endif
}
/*
Get statistics from driver.
*/
static struct net_device_stats * dmfe_get_stats(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
DMFE_DBUG(0, "dmfe_get_stats", 0);
return &db->stats;
}
/*
* Process the ethtool ioctl command
*/
static int dmfe_ethtool_ioctl(struct net_device *dev, void *useraddr)
{
//struct dmfe_board_info *db = dev->priv;
struct ethtool_drvinfo info = { ETHTOOL_GDRVINFO };
u32 ethcmd;
if (copy_from_user(ðcmd, useraddr, sizeof(ethcmd)))
return -EFAULT;
switch (ethcmd)
{
case ETHTOOL_GDRVINFO:
strcpy(info.driver, DRV_NAME);
strcpy(info.version, DRV_VERSION);
sprintf(info.bus_info, "ISA 0x%lx %d",dev->base_addr, dev->irq);
if (copy_to_user(useraddr, &info, sizeof(info)))
return -EFAULT;
return 0;
}
return -EOPNOTSUPP;
}
/*
Process the upper socket ioctl command
*/
static int dmfe_do_ioctl(struct net_device *dev, struct ifreq *ifr, int cmd)
{
board_info_t *db = netdev_priv(dev);
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,6,7) /* for kernel 2.6.7 */
struct mii_ioctl_data *data=(struct mii_ioctl_data *)&ifr->ifr_data;
#endif
int rc=0;
DMFE_DBUG(0, "dmfe_do_ioctl()", 0);
if (!netif_running(dev))
return -EINVAL;
if (cmd == SIOCETHTOOL)
rc = dmfe_ethtool_ioctl(dev, (void *) ifr->ifr_data);
else {
spin_lock_irq(&db->lock);
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,6,7) /* for kernel 2.6.7 */
rc = generic_mii_ioctl(&db->mii, data, cmd, NULL);
#else
rc = generic_mii_ioctl(&db->mii, if_mii(ifr), cmd, NULL);
#endif
spin_unlock_irq(&db->lock);
}
return rc;
}
/* Our watchdog timed out. Called by the networking layer */
static void dmfe_timeout(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
int i;
DMFE_DBUG(0, "dmfe_TX_timeout()", 0);
printk("TX time-out -- dmfe_timeout().\n");
db->reset_tx_timeout++;
db->stats.tx_errors++;
#if FALSE
printk("TX packet count = %d\n", db->tx_pkt_cnt);
printk("TX timeout = %d\n", db->reset_tx_timeout);
printk("22H=0x%02x 23H=0x%02x\n",ior(db,0x22),ior(db,0x23));
printk("faH=0x%02x fbH=0x%02x\n",ior(db,0xfa),ior(db,0xfb));
#endif
i=0;
while((i++<100)&&(ior(db,DM9KS_TCR) & 0x01))
{
udelay(30);
}
if(i<100)
{
db->tx_pkt_cnt = 0;
netif_wake_queue(dev);
}
else
{
dmfe_reset(dev);
}
}
static void dmfe_reset(struct net_device * dev)
{
board_info_t *db = netdev_priv(dev);
u8 reg_save;
int i;
/* Save previous register address */
reg_save = inb(db->io_addr);
netif_stop_queue(dev);
db->reset_counter++;
dmfe_init_dm9000(dev);
db->Speed =10;
for(i=0; i<1000; i++) /*wait link OK, waiting time=1 second */
{
if(phy_read(db,0x1) & 0x4) /*Link OK*/
{
if(phy_read(db,0)&0x2000) db->Speed =100;
else db->Speed =10;
break;
}
udelay(1000);
}
netif_wake_queue(dev);
/* Restore previous register address */
outb(reg_save, db->io_addr);
}
/*
A periodic timer routine
*/
static void dmfe_timer(struct timer_list *t)
{
struct board_info *db = from_timer(db, t, timer);
unsigned long data = db->timer_data;
struct net_device * dev = (struct net_device *)data;
// board_info_t *db = netdev_priv(dev);
DMFE_DBUG(0, "dmfe_timer()", 0);
if (db->cont_rx_pkt_cnt>=CONT_RX_PKT_CNT)
{
db->cont_rx_pkt_cnt=0;
iow(db, DM9KS_IMR, DM9KS_REGFF);
}
/* Set timer again */
db->timer.expires = DMFE_TIMER_WUT;
add_timer(&db->timer);
return;
}
/*
Received a packet and pass to upper layer
*/
static void dmfe_packet_receive(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
struct sk_buff *skb;
u8 rxbyte;
u16 i, GoodPacket, tmplen = 0, MDRAH, MDRAL;
u32 tmpdata;
rx_t rx;
u16 * ptr = (u16*)℞
u8* rdptr;
DMFE_DBUG(0, "dmfe_packet_receive()", 0);
db->cont_rx_pkt_cnt=0;
do {
/*store the value of Memory Data Read address register*/
MDRAH=ior(db, DM9KS_MDRAH);
MDRAL=ior(db, DM9KS_MDRAL);
ior(db, DM9KS_MRCMDX); /* Dummy read */
rxbyte = inb(db->io_data); /* Got most updated data */
#ifdef CHECKSUM
if (rxbyte&0x2) /* check RX byte */
{
printk("dm9ks: abnormal!\n");
dmfe_reset(dev);
break;
}else {
if (!(rxbyte&0x1))
break;
}
#else
if (rxbyte==0)
break;
if (rxbyte>1)
{
printk("dm9ks: Rxbyte error!\n");
dmfe_reset(dev);
break;
}
#endif
/* A packet ready now & Get status/length */
GoodPacket = TRUE;
outb(DM9KS_MRCMD, db->io_addr);
/* Read packet status & length */
switch (db->io_mode)
{
case DM9KS_BYTE_MODE:
*ptr = inb(db->io_data) +
(inb(db->io_data) << 8);
*(ptr+1) = inb(db->io_data) +
(inb(db->io_data) << 8);
break;
case DM9KS_WORD_MODE:
*ptr = inw(db->io_data);
*(ptr+1) = inw(db->io_data);
break;
case DM9KS_DWORD_MODE:
tmpdata = inl(db->io_data);
*ptr = tmpdata;
*(ptr+1) = tmpdata >> 16;
break;
default:
break;
}
/* Packet status check */
if (rx.desc.status & 0xbf)
{
GoodPacket = FALSE;
if (rx.desc.status & 0x01)
{
db->stats.rx_fifo_errors++;
printk(KERN_INFO"<RX FIFO error>\n");
}
if (rx.desc.status & 0x02)
{
db->stats.rx_crc_errors++;
printk(KERN_INFO"<RX CRC error>\n");
}
if (rx.desc.status & 0x80)
{
db->stats.rx_length_errors++;
printk(KERN_INFO"<RX Length error>\n");
}
if (rx.desc.status & 0x08)
printk(KERN_INFO"<Physical Layer error>\n");
}
if (!GoodPacket)
{
// drop this packet!!!
switch (db->io_mode)
{
case DM9KS_BYTE_MODE:
for (i=0; i<rx.desc.length; i++)
inb(db->io_data);
break;
case DM9KS_WORD_MODE:
tmplen = (rx.desc.length + 1) / 2;
for (i = 0; i < tmplen; i++)
inw(db->io_data);
break;
case DM9KS_DWORD_MODE:
tmplen = (rx.desc.length + 3) / 4;
for (i = 0; i < tmplen; i++)
inl(db->io_data);
break;
}
continue;/*next the packet*/
}
skb = dev_alloc_skb(rx.desc.length+4);
if (skb == NULL )
{
printk(KERN_INFO "%s: Memory squeeze.\n", dev->name);
/*re-load the value into Memory data read address register*/
iow(db,DM9KS_MDRAH,MDRAH);
iow(db,DM9KS_MDRAL,MDRAL);
return;
}
else
{
/* Move data from DM9000 */
skb->dev = dev;
skb_reserve(skb, 2);
rdptr = (u8*)skb_put(skb, rx.desc.length - 4);
/* Read received packet from RX SARM */
switch (db->io_mode)
{
case DM9KS_BYTE_MODE:
for (i=0; i<rx.desc.length; i++)
rdptr[i]=inb(db->io_data);
break;
case DM9KS_WORD_MODE:
tmplen = (rx.desc.length + 1) / 2;
for (i = 0; i < tmplen; i++)
((u16 *)rdptr)[i] = inw(db->io_data);
break;
case DM9KS_DWORD_MODE:
tmplen = (rx.desc.length + 3) / 4;
for (i = 0; i < tmplen; i++)
((u32 *)rdptr)[i] = inl(db->io_data);
break;
}
/* Pass to upper layer */
skb->protocol = eth_type_trans(skb,dev);
#ifdef CHECKSUM
if((rxbyte&0xe0)==0) /* receive packet no checksum fail */
skb->ip_summed = CHECKSUM_UNNECESSARY;
#endif
netif_rx(skb);
// dev->last_rx=jiffies;
db->stats.rx_packets++;
db->stats.rx_bytes += rx.desc.length;
db->cont_rx_pkt_cnt++;
#ifdef RDBG /* check RX FIFO pointer */
u16 MDRAH1, MDRAL1;
u16 tmp_ptr;
MDRAH1 = ior(db,DM9KS_MDRAH);
MDRAL1 = ior(db,DM9KS_MDRAL);
tmp_ptr = (MDRAH<<8)|MDRAL;
switch (db->io_mode)
{
case DM9KS_BYTE_MODE:
tmp_ptr += rx.desc.length+4;
break;
case DM9KS_WORD_MODE:
tmp_ptr += ((rx.desc.length+1)/2)*2+4;
break;
case DM9KS_DWORD_MODE:
tmp_ptr += ((rx.desc.length+3)/4)*4+4;
break;
}
if (tmp_ptr >=0x4000)
tmp_ptr = (tmp_ptr - 0x4000) + 0xc00;
if (tmp_ptr != ((MDRAH1<<8)|MDRAL1))
printk("[dm9ks:RX FIFO ERROR\n");
#endif
if (db->cont_rx_pkt_cnt>=CONT_RX_PKT_CNT)
{
dmfe_tx_done(0);
break;
}
}
}while((rxbyte & 0x01) == DM9KS_PKT_RDY);
DMFE_DBUG(0, "[END]dmfe_packet_receive()", 0);
}
/*
Read a word data from SROM
*/
static u16 read_srom_word(board_info_t *db, int offset)
{
iow(db, DM9KS_EPAR, offset);
iow(db, DM9KS_EPCR, 0x4);
while(ior(db, DM9KS_EPCR)&0x1); /* Wait read complete */
iow(db, DM9KS_EPCR, 0x0);
return (ior(db, DM9KS_EPDRL) + (ior(db, DM9KS_EPDRH) << 8) );
}
#if 0
/*
Set DM9000/DM9010 multicast address
*/
static void dm9000_hash_table(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
struct dev_mc_list *mcptr = dev->mc_list;
int mc_cnt = dev->mc_count;
u32 hash_val;
u16 i, oft, hash_table[4];
DMFE_DBUG(0, "dm9000_hash_table()", 0);
/* enable promiscuous mode */
if (dev->flags & IFF_PROMISC){
//printk(KERN_INFO "DM9KS:enable promiscuous mode\n");
iow(db, DM9KS_RXCR, ior(db,DM9KS_RXCR)|(1<<1));
return;
}else{
//printk(KERN_INFO "DM9KS:disable promiscuous mode\n");
iow(db, DM9KS_RXCR, ior(db,DM9KS_RXCR)&(~(1<<1)));
}
/* Receive all multicast packets */
if (dev->flags & IFF_ALLMULTI){
//printk(KERN_INFO "DM9KS:Pass all multicast\n");
iow(db, DM9KS_RXCR, ior(db,DM9KS_RXCR)|(1<<3));
}else{
//printk(KERN_INFO "DM9KS:Disable pass all multicast\n");
iow(db, DM9KS_RXCR, ior(db,DM9KS_RXCR)&(~(1<<3)));
}
/* Set Node address */
for (i = 0, oft = 0x10; i < 6; i++, oft++)
iow(db, oft, dev->dev_addr[i]);
/* Clear Hash Table */
for (i = 0; i < 4; i++)
hash_table[i] = 0x0;
/* broadcast address */
hash_table[3] = 0x8000;
/* the multicast address in Hash Table : 64 bits */
for (i = 0; i < mc_cnt; i++, mcptr = mcptr->next) {
hash_val = cal_CRC((char *)mcptr->dmi_addr, 6, 0) & 0x3f;
hash_table[hash_val / 16] |= (u16) 1 << (hash_val % 16);
}
/* Write the hash table to MAC MD table */
for (i = 0, oft = 0x16; i < 4; i++) {
iow(db, oft++, hash_table[i] & 0xff);
iow(db, oft++, (hash_table[i] >> 8) & 0xff);
}
}
#else
/*
* Set DM9000 multicast address
*/
static void
dm9000_hash_table_unlocked(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
struct netdev_hw_addr *ha;
int i, oft;
u32 hash_val;
u16 hash_table[4];
u8 rcr = RCR_DIS_LONG | RCR_DIS_CRC | RCR_RXEN;
//dm9000_dbg(db, 1, "entering %s\n", __func__);
for (i = 0, oft = DM9000_PAR; i < 6; i++, oft++)
iow(db, oft, dev->dev_addr[i]);
/* Clear Hash Table */
for (i = 0; i < 4; i++)
hash_table[i] = 0x0;
/* broadcast address */
hash_table[3] = 0x8000;
if (dev->flags & IFF_PROMISC)
rcr |= RCR_PRMSC;
if (dev->flags & IFF_ALLMULTI)
rcr |= RCR_ALL;
/* the multicast address in Hash Table : 64 bits */
netdev_for_each_mc_addr(ha, dev) {
hash_val = ether_crc_le(6, ha->addr) & 0x3f;
hash_table[hash_val / 16] |= (u16) 1 << (hash_val % 16);
}
/* Write the hash table to MAC MD table */
for (i = 0, oft = DM9000_MAR; i < 4; i++) {
iow(db, oft++, hash_table[i]);
iow(db, oft++, hash_table[i] >> 8);
}
iow(db, DM9000_RCR, rcr);
}
static void
dm9000_hash_table(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
unsigned long flags;
spin_lock_irqsave(&db->lock, flags);
dm9000_hash_table_unlocked(dev);
spin_unlock_irqrestore(&db->lock, flags);
}
#endif
/*
Calculate the CRC valude of the Rx packet
flag = 1 : return the reverse CRC (for the received packet CRC)
0 : return the normal CRC (for Hash Table index)
*/
static unsigned long cal_CRC(unsigned char * Data, unsigned int Len, u8 flag)
{
u32 crc = ether_crc_le(Len, Data);
if (flag)
return ~crc;
return crc;
}
static int mdio_read(struct net_device *dev, int phy_id, int location)
{
board_info_t *db = netdev_priv(dev);
return phy_read(db, location);
}
static void mdio_write(struct net_device *dev, int phy_id, int location, int val)
{
board_info_t *db = netdev_priv(dev);
phy_write(db, location, val);
}
/*
Read a byte from I/O port
*/
u8 ior(board_info_t *db, int reg)
{
outb(reg, db->io_addr);
return inb(db->io_data);
}
/*
Write a byte to I/O port
*/
void iow(board_info_t *db, int reg, u8 value)
{
outb(reg, db->io_addr);
outb(value, db->io_data);
}
/*
Read a word from phyxcer
*/
static u16 phy_read(board_info_t *db, int reg)
{
/* Fill the phyxcer register into REG_0C */
iow(db, DM9KS_EPAR, DM9KS_PHY | reg);
iow(db, DM9KS_EPCR, 0xc); /* Issue phyxcer read command */
while(ior(db, DM9KS_EPCR)&0x1); /* Wait read complete */
iow(db, DM9KS_EPCR, 0x0); /* Clear phyxcer read command */
/* The read data keeps on REG_0D & REG_0E */
return ( ior(db, DM9KS_EPDRH) << 8 ) | ior(db, DM9KS_EPDRL);
}
/*
Write a word to phyxcer
*/
static void phy_write(board_info_t *db, int reg, u16 value)
{
/* Fill the phyxcer register into REG_0C */
iow(db, DM9KS_EPAR, DM9KS_PHY | reg);
/* Fill the written data into REG_0D & REG_0E */
iow(db, DM9KS_EPDRL, (value & 0xff));
iow(db, DM9KS_EPDRH, ( (value >> 8) & 0xff));
iow(db, DM9KS_EPCR, 0xa); /* Issue phyxcer write command */
while(ior(db, DM9KS_EPCR)&0x1); /* Wait read complete */
iow(db, DM9KS_EPCR, 0x0); /* Clear phyxcer write command */
}
//====dmfe_ethtool_ops member functions====
static void dmfe_get_drvinfo(struct net_device *dev,
struct ethtool_drvinfo *info)
{
//board_info_t *db = (board_info_t *)dev->priv;
strcpy(info->driver, DRV_NAME);
strcpy(info->version, DRV_VERSION);
sprintf(info->bus_info, "ISA 0x%lx irq=%d",dev->base_addr, dev->irq);
}
static int dmfe_get_settings(struct net_device *dev, struct ethtool_cmd *cmd)
{
board_info_t *db = netdev_priv(dev);
spin_lock_irq(&db->lock);
mii_ethtool_gset(&db->mii, cmd);
spin_unlock_irq(&db->lock);
return 0;
}
static int dmfe_set_settings(struct net_device *dev, struct ethtool_cmd *cmd)
{
board_info_t *db = netdev_priv(dev);
int rc;
spin_lock_irq(&db->lock);
rc = mii_ethtool_sset(&db->mii, cmd);
spin_unlock_irq(&db->lock);
return rc;
}
/*
* Check the link state
*/
static u32 dmfe_get_link(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
return mii_link_ok(&db->mii);
}
/*
* Reset Auto-negitiation
*/
static int dmfe_nway_reset(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
return mii_nway_restart(&db->mii);
}
/*
* Get RX checksum offload state
*/
static uint32_t dmfe_get_rx_csum(struct net_device *dev)
{
board_info_t *db = netdev_priv(dev);
return db->rx_csum;
}
/*
* Get TX checksum offload state
*/
static uint32_t dmfe_get_tx_csum(struct net_device *dev)
{
return (dev->features & NETIF_F_HW_CSUM) != 0;
}
/*
* Enable/Disable RX checksum offload
*/
static int dmfe_set_rx_csum(struct net_device *dev, uint32_t data)
{
#ifdef CHECKSUM
board_info_t *db = netdev_priv(dev);
db->rx_csum = data;
if(netif_running(dev)) {
dmfe_stop(dev);
dmfe_open(dev);
} else
dmfe_init_dm9000(dev);
#else
printk(KERN_ERR "DM9:Don't support checksum\n");
#endif
return 0;
}
/*
* Enable/Disable TX checksum offload
*/
static int dmfe_set_tx_csum(struct net_device *dev, uint32_t data)
{
#ifdef CHECKSUM
if (data)
dev->features |= NETIF_F_HW_CSUM;
else
dev->features &= ~NETIF_F_HW_CSUM;
#else
printk(KERN_ERR "DM9:Don't support checksum\n");
#endif
return 0;
}
//=========================================
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,4,28) /* for kernel 2.4.28 */
static struct ethtool_ops dmfe_ethtool_ops = {
.get_drvinfo = dmfe_get_drvinfo,
.get_settings = dmfe_get_settings,
.set_settings = dmfe_set_settings,
.get_link = dmfe_get_link,
.nway_reset = dmfe_nway_reset,
//.get_rx_csum = dmfe_get_rx_csum,
//.set_rx_csum = dmfe_set_rx_csum,
//.get_tx_csum = dmfe_get_tx_csum,
//.set_tx_csum = dmfe_set_tx_csum,
};
#endif
//#ifdef MODULE
MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("Davicom DM9000/DM9010 ISA/uP Fast Ethernet Driver");
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
MODULE_PARM(mode, "i");
MODULE_PARM(irq, "i");
MODULE_PARM(iobase, "i");
#else
module_param(mode, int, 0);
module_param(irq, int, 0);
module_param(iobase, int, 0);
#endif
MODULE_PARM_DESC(mode,"Media Speed, 0:10MHD, 1:10MFD, 4:100MHD, 5:100MFD");
MODULE_PARM_DESC(irq,"EtherLink IRQ number");
MODULE_PARM_DESC(iobase, "EtherLink I/O base address");
/* Description:
when user used insmod to add module, system invoked init_module()
to initilize and register.
*/
int dm9000c_init(void)
{
volatile unsigned long *bwscon; // 0x48000000
volatile unsigned long *bankcon4; // 0x48000014
unsigned long val;
iobase = (int)ioremap(0x20000000, 1024); /* thisway.diy@163.com */
//irq = 7; //IRQ_EINT7; /* thisway.diy@163.com */
/* 设置S3C2440的memory controller */
bwscon = ioremap(0x48000000, 4);
bankcon4 = ioremap(0x48000014, 4);
/* DW4[17:16]: 01-16bit
* WS4[18] : 0-WAIT disable
* ST4[19] : 0 = Not using UB/LB (The pins are dedicated nWBE[3:0])
*/
val = *bwscon;
val &= ~(0xf<<16);
val |= (1<<16);
*bwscon = val;
/*
* Tacs[14:13]: 发出片选信号之前,多长时间内要先发出地址信号
* DM9000C的片选信号和CMD信号可以同时发出,
* 所以它设为0
* Tcos[12:11]: 发出片选信号之后,多长时间才能发出读信号nOE
* DM9000C的T1>=0ns,
* 所以它设为0
* Tacc[10:8] : 读写信号的脉冲长度,
* DM9000C的T2>=10ns,
* 所以它设为1, 表示2个hclk周期,hclk=100MHz,就是20ns
* Tcoh[7:6] : 当读信号nOE变为高电平后,片选信号还要维持多长时间
* DM9000C进行写操作时, nWE变为高电平之后, 数据线上的数据还要维持最少3ns
* DM9000C进行读操作时, nOE变为高电平之后, 数据线上的数据在6ns之内会消失
* 我们取一个宽松值: 让片选信号在nOE放为高电平后,再维持10ns,
* 所以设为01
* Tcah[5:4] : 当片选信号变为高电平后, 地址信号还要维持多长时间
* DM9000C的片选信号和CMD信号可以同时出现,同时消失
* 所以设为0
* PMC[1:0] : 00-正常模式
*
*/
//*bankcon4 = (1<<8)|(1<<6); /* 对于DM9000C可以设Tacc为1, 对于DM9000E,Tacc要设大一点,比如最大值7 */
*bankcon4 = (7<<8)|(1<<6); /* MINI2440使用DM9000E,Tacc要设大一点 */
iounmap(bwscon);
iounmap(bankcon4);
switch(mode) {
case DM9KS_10MHD:
case DM9KS_100MHD:
case DM9KS_10MFD:
case DM9KS_100MFD:
media_mode = mode;
break;
default:
media_mode = DM9KS_AUTO;
}
dmfe_dev = dmfe_probe();
if(IS_ERR(dmfe_dev))
return PTR_ERR(dmfe_dev);
return 0;
}
/* Description:
when user used rmmod to delete module, system invoked clean_module()
to un-register DEVICE.
*/
void dm9000c_exit(void)
{
struct net_device *dev = dmfe_dev;
DMFE_DBUG(0, "clean_module()", 0);
unregister_netdev(dmfe_dev);
release_region(dev->base_addr, 2);
#if LINUX_VERSION_CODE < KERNEL_VERSION(2,5,0)
kfree(dev);
#else
free_netdev(dev);
#endif
iounmap((void *)iobase);
DMFE_DBUG(0, "clean_module() exit", 0);
}
static int dm9000drv_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct device_node *dp_node = dev->of_node;
struct resource *res;
int i;
res = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
if (res) {
irq = res->start;
printk("get dm9000 irq %d\n", irq);
}
else {
printk("can not get irq res for dm9000\n");
return -1;
}
return dm9000c_init();
}
static int dm9000drv_remove(struct platform_device *pdev)
{
dm9000c_exit();
return 0;
}
static const struct of_device_id of_match_dm9000[] = {
{ .compatible = "davicom,dm9000", .data = NULL },
{ /* sentinel */ }
};
struct platform_driver dm9000_drv = {
.probe = dm9000drv_probe,
.remove = dm9000drv_remove,
.driver = {
.name = "dm9000",
.of_match_table = of_match_dm9000, /* 能支持哪些来自于dts的platform_device */
}
};
static int dm9000drv_init(void)
{
platform_driver_register(&dm9000_drv);
return 0;
}
static void dm9000drv_exit(void)
{
platform_driver_unregister(&dm9000_drv);
}
module_init(dm9000drv_init);
module_exit(dm9000drv_exit);
MODULE_LICENSE("GPL");
//#endif
3 在设备树中描述触摸屏中断
jz2440ts@5800000 {
compatible = "jz2440,ts";
reg = <0x58000000 0x100>;
reg-names = "adc_ts_physical";
interrupts = <1 31 9 3>, <1 31 10 3>;
interrupt-names = "int_ts", "int_adc_s";
clocks = <&clocks PCLK_ADC>;
clock-names = "adc";
};
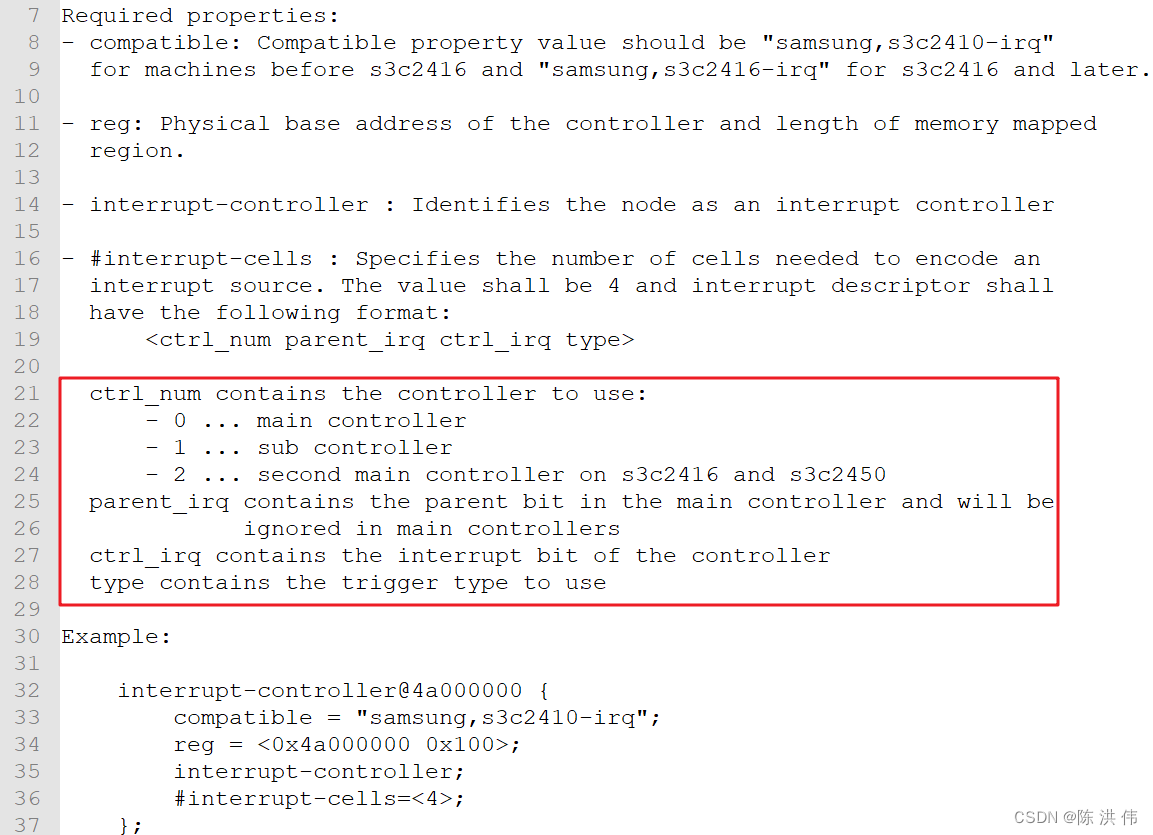
这个节点的父节点就是根节点,他的中断控制器就是interrupt-controller。然后触摸屏中断描述里面 interrupts = <1 31 9 3>, <1 31 10 3>;,我们知道触摸屏使用两个中断,一个是触摸笔按下松开中断,另一个是ADC中断,
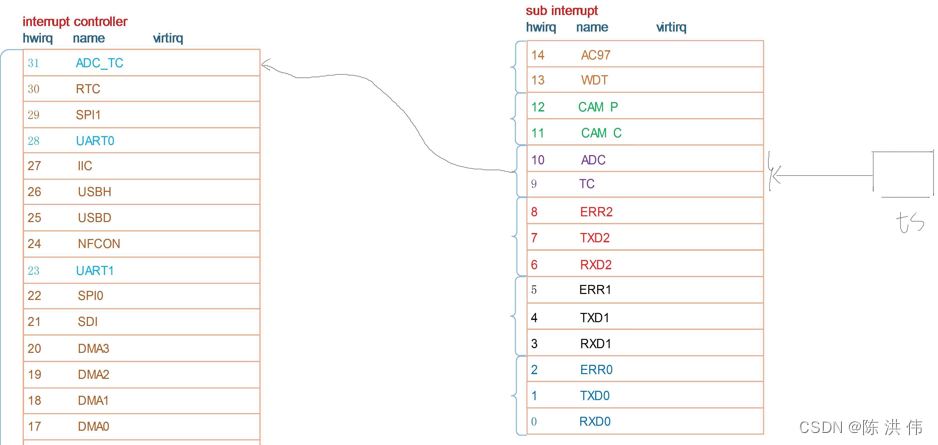
当我们的触摸笔按下后,他产生的中断先发给子中断控制器,再由子中断控制器发给interrupt-controller控制器,我们可以看一下内核中关于中断的文档介绍,就可以知道interrupts = <1 31 9 3>, <1 31 10 3>;表示什么意思
修改方法:
根据设备节点的compatible属性,
在驱动程序中构造/注册 platform_driver,
在 platform_driver 的 probe 函数中获得中断资源
实验方法:
以下是修改好的代码:
第6课第1节_网卡_触摸屏驱动\001th_dm9000\dm9dev9000c.c
第6课第1节_网卡_触摸屏驱动\002th_touchscreen\s3c_ts.c
分别上传到内核如下目录:
drivers/net/ethernet/davicom
drivers/input/touchscreen
a. 编译内核
b. 使用新的uImage启动
c. 测试网卡:
ifconfig eth0 192.168.1.101
ping 192.168.1.1
d. 测试触摸屏:
hexdump /dev/evetn0 // 然后点击触摸屏