上一篇文章中,我们采用HPR坐标系里的向量旋转,在地表绘制了这样的螺旋线:

在复杂多样的现实应用需求中,还有一种更为普遍的计算需求,就是求取地表到全向光源的距离为D的所有点的集合(用多边形组成的近似椭圆区域)。
1. 问题描述
问题:已知一个点 T 位于空中,求取所有海拔为H的点M组成的集合,使得点M距离T的直线距离为D米。
如果是在一个正球中,这个问题是非常容易解决的,直接求解三角函数即可。而且,在正球下,二者的图形都是圆,且仰角与距离是等效的概念。椭球中,情况就复杂起来了,因为各个方向上的曲率是不同的,仰角也不同。相同仰角下,距离也不同。
下面为了方便,假设光源T的经度 θ \theta θ=0,纬度为 φ \varphi φ,高度为Hb。要计算的椭球的高度是Ha。光源的ECEF坐标为 T ⃗ = { A , C , E } \vec T=\{A,C,E\} T={A,C,E},已经提前计算完毕。
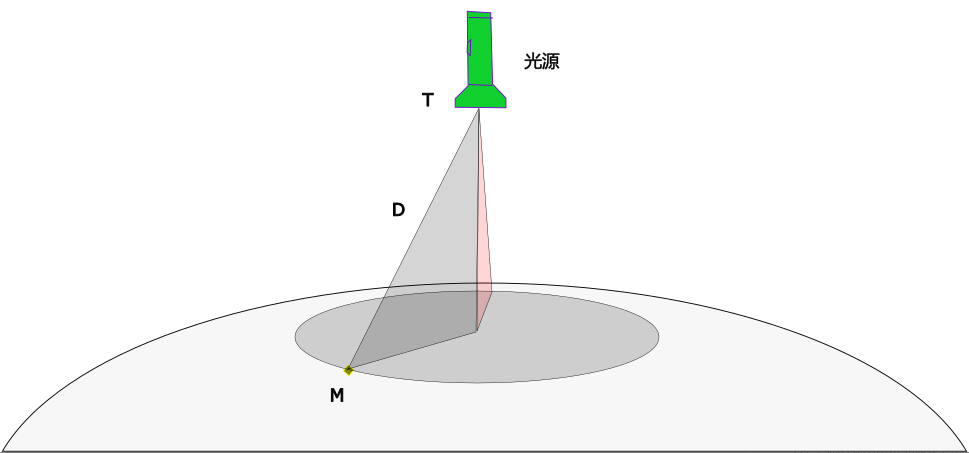
2. 投射推导
由于椭球的曲率和经度无关,假设手电的经度为0. 对于全向光源,姿态为 Heading=0, Pitch=-90, Roll = 0, 也就是手电垂直指向地面。
此时,HPR坐标系的逆运算矩阵变为:
T
e
n
u
′
=
[
sin
(
h
)
cos
(
p
)
cos
(
h
)
cos
(
p
)
sin
(
p
)
−
sin
(
h
)
sin
(
p
)
cos
(
r
)
+
sin
(
r
)
cos
(
h
)
−
sin
(
h
)
sin
(
r
)
−
sin
(
p
)
cos
(
h
)
cos
(
r
)
cos
(
p
)
cos
(
r
)
sin
(
h
)
sin
(
p
)
sin
(
r
)
+
cos
(
h
)
cos
(
r
)
−
sin
(
h
)
cos
(
r
)
+
sin
(
p
)
sin
(
r
)
cos
(
h
)
−
sin
(
r
)
cos
(
p
)
]
T'_{enu}=\left[\begin{matrix}\sin{\left(h \right)} \cos{\left(p \right)} & \cos{\left(h \right)} \cos{\left(p \right)} &\sin{\left(p \right)}\\- \sin{\left(h \right)} \sin{\left(p \right)} \cos{\left(r \right)} + \sin{\left(r \right)} \cos{\left(h \right)} & - \sin{\left(h \right)} \sin{\left(r \right)} - \sin{\left(p \right)} \cos{\left(h \right)} \cos{\left(r \right)} & \cos{\left(p \right)} \cos{\left(r \right)}\\\sin{\left(h \right)} \sin{\left(p \right)} \sin{\left(r \right)} + \cos{\left(h \right)} \cos{\left(r \right)} & - \sin{\left(h \right)} \cos{\left(r \right)} + \sin{\left(p \right)} \sin{\left(r \right)} \cos{\left(h \right)} & - \sin{\left(r \right)} \cos{\left(p \right)}\end{matrix}\right]
Tenu′=
sin(h)cos(p)−sin(h)sin(p)cos(r)+sin(r)cos(h)sin(h)sin(p)sin(r)+cos(h)cos(r)cos(h)cos(p)−sin(h)sin(r)−sin(p)cos(h)cos(r)−sin(h)cos(r)+sin(p)sin(r)cos(h)sin(p)cos(p)cos(r)−sin(r)cos(p)
T t = T e n u ′ T = [ 0 0 1 0 − 1 0 1 0 0 ] Tt=T'^T_{enu}=\left[\begin{matrix}0 & 0 & 1\\0 & -1 & 0\\1 & 0 & 0\end{matrix}\right] Tt=Tenu′T= 0010−10100
而 ENU的逆运算矩阵变为:
R = [ − sin θ cos θ 0 − sin φ c o s θ − sin φ sin θ cos φ cos φ c o s θ cos φ sin θ sin φ ] R = \begin{bmatrix} {-\sin \theta} & {\cos \theta} & 0\\ {-\sin \varphi cos\theta} & {-\sin \varphi \sin \theta} & {\cos \varphi} \\ \cos \varphi cos\theta & \cos \varphi \sin \theta & \sin \varphi \end{bmatrix} R= −sinθ−sinφcosθcosφcosθcosθ−sinφsinθcosφsinθ0cosφsinφ
R T = [ 0 − sin ( φ ) cos ( φ ) 1 0 0 0 cos ( φ ) sin ( φ ) ] R^T=\left[\begin{matrix}0 & - \sin{\left( \varphi\right)} & \cos{\left( \varphi \right)}\\1 & 0 & 0\\0 & \cos{\left( \varphi \right)} & \sin{\left( \varphi \right)}\end{matrix}\right] RT= 010−sin(φ)0cos(φ)cos(φ)0sin(φ)
而 α β \alpha \beta αβ坐标下,HPR光线的矢量为:
K h p r = [ cos ( α ) sin ( α ) cos ( β ) sin ( α ) sin ( β ) ] T K_{hpr}=\left[\begin{matrix}\cos{\left(\alpha \right)} \\ \sin{\left(\alpha \right)} \cos{\left(\beta \right)} \\ \sin{\left(\alpha \right)} \sin{\left(\beta \right)}\end{matrix}\right]^T Khpr= cos(α)sin(α)cos(β)sin(α)sin(β) T
变换到 ECEF:
K e c e f = K h p r × T e n u ′ T × R T K_{ecef}=K_{hpr} \times T'^T_{enu} \times R^T Kecef=Khpr×Tenu′T×RT
化简:
K e c e f = [ − sin ( α ) cos ( β ) − sin ( α ) sin ( β ) sin ( φ ) + cos ( α ) cos ( φ ) sin ( α ) sin ( β ) cos ( φ ) + sin ( φ ) cos ( α ) ] T K_{ecef}=\left[\begin{matrix}- \sin{\left(\alpha \right)} \cos{\left(\beta \right)} \\ - \sin{\left(\alpha \right)} \sin{\left(\beta \right)} \sin{\left(\varphi \right)} + \cos{\left(\alpha \right)} \cos{\left(\varphi \right)} \\ \sin{\left(\alpha \right)} \sin{\left(\beta \right)} \cos{\left(\varphi \right)} + \sin{\left(\varphi \right)} \cos{\left(\alpha \right)}\end{matrix}\right]^T Kecef= −sin(α)cos(β)−sin(α)sin(β)sin(φ)+cos(α)cos(φ)sin(α)sin(β)cos(φ)+sin(φ)cos(α) T
这就是在投射角度 α β \alpha \beta αβ 在ECEF坐标下的单位方向矢量。
利用参数方程, 可以得到过 T的直线为
T M ⃗ = T ⃗ + K e c e f ⋅ t \vec {TM} = \vec T+K_{ecef} \cdot {t} TM=T+Kecef⋅t
t 是距离量,单位是米。
根据上一章的推导,我们知道 t 的根有0、1或者2个。在带入了 β \beta β, α \alpha α的情况下,可以求解方程。
3 模型求解
现在,要求这个直线和椭球交汇为一点A,且交会时,距离 t = D,已知
β
\beta
β,求取
α
\alpha
α
对一个高度为H的标准椭球,其方程为:
x 2 ( a + H ) 2 + y 2 ( a + H ) 2 + z 2 ( b + H ) 2 = 1 \frac{x^2}{(a+H)^2}+\frac{y^2}{(a+H)^2}+\frac{z^2}{(b+H)^2}=1 (a+H)2x2+(a+H)2y2+(b+H)2z2=1
为了便于展开,设
G
=
1
(
a
+
H
)
2
G=\frac{1}{(a+H)^2}
G=(a+H)21,
L
=
1
(
b
+
H
)
2
L=\frac{1}{(b+H)^2}
L=(b+H)21
按照上一章直线与椭球的交点结论,直接给出方程为:
t [ 1 ] = 2 ⋅ ( 4 A G sin ( α ) cos ( β ) + 4 C G sin ( α ) sin ( β ) sin ( φ ) − 4 C G cos ( α ) cos ( φ ) − 4 E L sin ( α ) sin ( β ) cos ( φ ) − 4 E L sin ( φ ) cos ( α ) + 2 ( − A 2 G − C 2 G − E 2 L + 1 ) ( − G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) + 8 G sin 2 ( α ) cos 2 ( β ) + 8 G cos 2 ( α ) cos 2 ( φ ) + L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) + 8 L sin 2 ( φ ) cos 2 ( α ) ) + 8 ( − A G sin ( α ) cos ( β ) − C G sin ( α ) sin ( β ) sin ( φ ) + C G cos ( α ) cos ( φ ) + E L sin ( α ) sin ( β ) cos ( φ ) + E L sin ( φ ) cos ( α ) ) 2 ) − G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) + 8 G sin 2 ( α ) cos 2 ( β ) + 8 G cos 2 ( α ) cos 2 ( φ ) + L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) + 8 L sin 2 ( φ ) cos 2 ( α ) t[1]=\frac{2 \cdot (4 A G \sin{(\alpha )} \cos{(\beta )} + 4 C G \sin{(\alpha )} \sin{(\beta )} \sin{(\varphi )}- 4 C G \cos{(\alpha )} \cos{(\varphi )} - 4 E L \sin{(\alpha )} \sin{(\beta )} \cos{(\varphi )} - 4 E L \sin{(\varphi )} \cos{(\alpha )} + \sqrt{2} \sqrt{(- A^{2} G - C^{2} G - E^{2} L + 1) (- G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \sin^{2}{(\varphi )} + 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} + 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} + L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} + 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )}) + 8 (- A G \sin{(\alpha )} \cos{(\beta )} - C G \sin{(\alpha )} \sin{(\beta )} \sin{(\varphi )} + C G \cos{(\alpha )} \cos{(\varphi )} + E L \sin{(\alpha )} \sin{(\beta )} \cos{(\varphi )} + E L \sin{(\varphi )} \cos{(\alpha )})^{2}})}{- G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )}\sin^{2}{(\varphi )} + 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} + 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} + L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} + 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )}} t[1]=−G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Gsin2(α)sin2(β)sin2(φ)+8Gsin2(α)cos2(β)+8Gcos2(α)cos2(φ)+L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Lsin2(α)sin2(β)cos2(φ)+8Lsin2(φ)cos2(α)2⋅(4AGsin(α)cos(β)+4CGsin(α)sin(β)sin(φ)−4CGcos(α)cos(φ)−4ELsin(α)sin(β)cos(φ)−4ELsin(φ)cos(α)+2(−A2G−C2G−E2L+1)(−G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Gsin2(α)sin2(β)sin2(φ)+8Gsin2(α)cos2(β)+8Gcos2(α)cos2(φ)+L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Lsin2(α)sin2(β)cos2(φ)+8Lsin2(φ)cos2(α))+8(−AGsin(α)cos(β)−CGsin(α)sin(β)sin(φ)+CGcos(α)cos(φ)+ELsin(α)sin(β)cos(φ)+ELsin(φ)cos(α))2)
t [ 2 ] = 2 ( 2 ( − A 2 G − C 2 G − E 2 L + 1 ) ( − G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) + 8 G sin 2 ( α ) cos 2 ( β ) + 8 G cos 2 ( α ) cos 2 ( φ ) + L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) + 8 L sin 2 ( φ ) cos 2 ( α ) ) + 8 ( − A G sin ( α ) cos ( β ) − C G sin ( α ) sin ( β ) sin ( φ ) + C G cos ( α ) cos ( φ ) + E L sin ( α ) sin ( β ) cos ( φ ) + E L sin ( φ ) cos ( α ) ) 2 ( G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) − 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) − 8 G sin 2 ( α ) cos 2 ( β ) − 8 G cos 2 ( α ) cos 2 ( φ ) − L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) − 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) − 8 L sin 2 ( φ ) cos 2 ( α ) ) − 4 ( − A G sin ( α ) cos ( β ) − C G sin ( α ) sin ( β ) sin ( φ ) + C G cos ( α ) cos ( φ ) + E L sin ( α ) sin ( β ) cos ( φ ) + E L sin ( φ ) cos ( α ) ) ( − G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) + 8 G sin 2 ( α ) cos 2 ( β ) + 8 G cos 2 ( α ) cos 2 ( φ ) + L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) + 8 L sin 2 ( φ ) cos 2 ( α ) ) ) ( − G ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 G sin 2 ( α ) sin 2 ( β ) sin 2 ( φ ) + 8 G sin 2 ( α ) cos 2 ( β ) + 8 G cos 2 ( α ) cos 2 ( φ ) + L ( sin ( − 2 α + β + 2 φ ) + sin ( 2 α − β + 2 φ ) + sin ( 2 α + β − 2 φ ) − sin ( 2 α + β + 2 φ ) ) + 8 L sin 2 ( α ) sin 2 ( β ) cos 2 ( φ ) + 8 L sin 2 ( φ ) cos 2 ( α ) ) 2 t[2]=\frac{2 (\sqrt{2} \sqrt{(- A^{2} G - C^{2} G - E^{2} L + 1) (- G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} -\sin{(2 \alpha + \beta + 2 \varphi )}) + 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \sin^{2}{(\varphi )} + 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} + 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} + L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} +\sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} + 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )}) + 8 (- A G \sin{(\alpha )} \cos{(\beta )} - C G \sin{(\alpha )} \sin{(\beta )} \sin{(\varphi )} + C G \cos{(\alpha )} \cos{(\varphi )} + E L \sin{(\alpha )} \sin{(\beta )} \cos{(\varphi )} + E L \sin{(\varphi )} \cos{(\alpha )})^{2}} (G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) - 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \sin^{2}{(\varphi )} - 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} - 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} - L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) - 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} - 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )}) - 4 (- A G \sin{(\alpha )} \cos{(\beta )} - C G \sin{(\alpha )} \sin{(\beta )} \sin{(\varphi )} + C G \cos{(\alpha )} \cos{(\varphi )} + E L \sin{(\alpha )} \sin{(\beta )} \cos{(\varphi)} + E L \sin{(\varphi )} \cos{(\alpha )}) (- G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \sin^{2}{(\varphi )} + 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} + 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} + L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} + 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )}))}{(- G (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 G \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \sin^{2}{(\varphi )} + 8 G \sin^{2}{(\alpha )} \cos^{2}{(\beta )} + 8 G \cos^{2}{(\alpha )} \cos^{2}{(\varphi )} + L (\sin{(- 2 \alpha + \beta + 2 \varphi )} + \sin{(2 \alpha - \beta + 2 \varphi )} + \sin{(2 \alpha + \beta - 2 \varphi )} - \sin{(2 \alpha + \beta + 2 \varphi )}) + 8 L \sin^{2}{(\alpha )} \sin^{2}{(\beta )} \cos^{2}{(\varphi )} + 8 L \sin^{2}{(\varphi )} \cos^{2}{(\alpha )})^{2}} t[2]=(−G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Gsin2(α)sin2(β)sin2(φ)+8Gsin2(α)cos2(β)+8Gcos2(α)cos2(φ)+L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Lsin2(α)sin2(β)cos2(φ)+8Lsin2(φ)cos2(α))22(2(−A2G−C2G−E2L+1)(−G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Gsin2(α)sin2(β)sin2(φ)+8Gsin2(α)cos2(β)+8Gcos2(α)cos2(φ)+L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Lsin2(α)sin2(β)cos2(φ)+8Lsin2(φ)cos2(α))+8(−AGsin(α)cos(β)−CGsin(α)sin(β)sin(φ)+CGcos(α)cos(φ)+ELsin(α)sin(β)cos(φ)+ELsin(φ)cos(α))2(G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))−8Gsin2(α)sin2(β)sin2(φ)−8Gsin2(α)cos2(β)−8Gcos2(α)cos2(φ)−L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))−8Lsin2(α)sin2(β)cos2(φ)−8Lsin2(φ)cos2(α))−4(−AGsin(α)cos(β)−CGsin(α)sin(β)sin(φ)+CGcos(α)cos(φ)+ELsin(α)sin(β)cos(φ)+ELsin(φ)cos(α))(−G(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Gsin2(α)sin2(β)sin2(φ)+8Gsin2(α)cos2(β)+8Gcos2(α)cos2(φ)+L(sin(−2α+β+2φ)+sin(2α−β+2φ)+sin(2α+β−2φ)−sin(2α+β+2φ))+8Lsin2(α)sin2(β)cos2(φ)+8Lsin2(φ)cos2(α)))
Octave 符号计算的程序:
clc
clear
pkg load symbolic
a = sym('a');
b = sym('b');
h = sym('0');
p = sym('pi/2');
r = sym('0');
TT = [
sin(h)*cos(p), -sin(h)*sin(p)*cos(r)+sin(r)*cos(h), sin(h)*sin(p)*sin(r)+cos(h)*cos(r);
cos(h)*cos(p), -sin(h)*sin(r)-sin(p)*cos(h)*cos(r),-sin(h)*cos(r)+sin(p)*sin(r)*cos(h);
sin(p), cos(p)*cos(r), -sin(r)*cos(p)
];
ts = sym('0');
tf = sym('tf');
TR = [
-sin(ts),-sin(tf)*cos(ts),cos(tf)*cos(ts);
cos(ts),-sin(tf)*sin(ts),cos(tf)*sin(ts);
0,cos(tf),sin(tf)
];
Khpr = [cos(a),sin(a)*cos(b),sin(a)*sin(b)];
Kecef = Khpr * TT * TR;
G = sym('G');
L = sym('L');
A = sym('A');
B = Kecef(1);
C = sym('C');
D = Kecef(2);
E = sym('E');
F = Kecef(3);
t = sym('t');
Tt=solve(G*(A+B*t)^2 + G*(C+D*t)^2 + K*(E+F*t)^2==1,t);
Ts=simplify(Tt);
latex(Ts)
注意,上面的方程中,是写成了 t 的形式,但未知数却是 α \alpha α,它是一个非线性的高次三角方程。
但对于定义域在[0,-90]度的角度 来说,可以研究一下它的单调性,以采用计算方法进行求解。这个关于 α \alpha α的方程,在俯视时,角度与距离的关系是非线性递增的。
 我们可以采用二分查找的方法,较为迅速的锁定角度值。
我们可以采用二分查找的方法,较为迅速的锁定角度值。
4 主要接口
下面这个函数可以按照给定的 β \beta β求取位置。距离的最小值,就是手电到椭球的最短距离(H)。距离的最大值,是各个方向上做切线,切线段的长度。满足值域范围的进行迭代计算;不满足的,返回最小或者最大值。
/*!
* \brief contour_distance 计算到空间位置LLA坐标 T 距离为D的地面位置集合。
* \param lla_torch 全向光源的位置
* \param queryD 距离等值线的距离。D=0会返回最短距离, D超过最大距离,则返回最大距离。
* \param earth_H 地表高度
* \param vec_beta 给定的HPR beta,正北是0,顺时针递增
* \param vec_lat 存储纬度的向量
* \param vec_lon 存储经度的向量
* \param vec_D 存储距离的向量
* \param derrMeter 迭代误差,默认1mm
* \param rad 弧度true/度 false
* \param latfirst 纬度经度高度 true/经度 纬度 高度 false
*/
void contour_distance(const double lla_torch [3],
const double queryD,
const double earth_H,
const std::vector<double> vec_beta,
std::vector<double> * vec_lat,
std::vector<double> * vec_lon,
std::vector<double> * vec_D,
const double derrMeter = 1e-3,
const bool rad = false,
const bool latfirst = true)
注意,椭球上,各个 β \beta β方向上的最大距离是不同的。
5. 例子
我们求取不同距离上的围线:
void demo_contour_distance()
{
printf ("\n\n========%s=======\n",__FUNCTION__);
using namespace CES_GEOCALC;
//光源的LLA
const double lla_torch [3] = {35.273, 117.121, 10000};
std::vector<double> betas;
for (int i=0;i<360;i+=5)
betas.push_back(i);
std::vector<double> lats,lons,Ds;
contour_distance(lla_torch,123000,100,betas,&lats,&lons,&Ds);
const size_t res_sz = lats.size();
for (size_t i=0;i<res_sz;++i)
{
printf("%.6lf,%.6lf\n",lats[i],lons[i]);
}
}
在不同的纬度、高度下,效果如下图:
 |  |
6 代码
代码参考
https://gitcode.net/coloreaglestdio/geocalc