STMCUBEMX_IIC_DMA_AT24C64读取和写入
说明:
1、此例程只是从硬件IIC升级到DMA读写,因为暂时存储的掉电不丢失数据不多,一页就可以够用,不用担心跨页读写的问题
2、使用DMA后,程序确实是变快了,但是也要注意一个问题,前一个时刻使用HAL_I2C_Mem_Read_DMA()函数把书从EEPROM读取出来了,下一时刻不能着急立马使用读取出来的值,因为此时DMA正在从IIC外设往内存中搬运数据,要等待DMA搬运完成,而使用HAL_I2C_Mem_Read()读取的话就没有这个问题,因为他是阻塞性函数,只有读取完成了程序才会往下继续执行



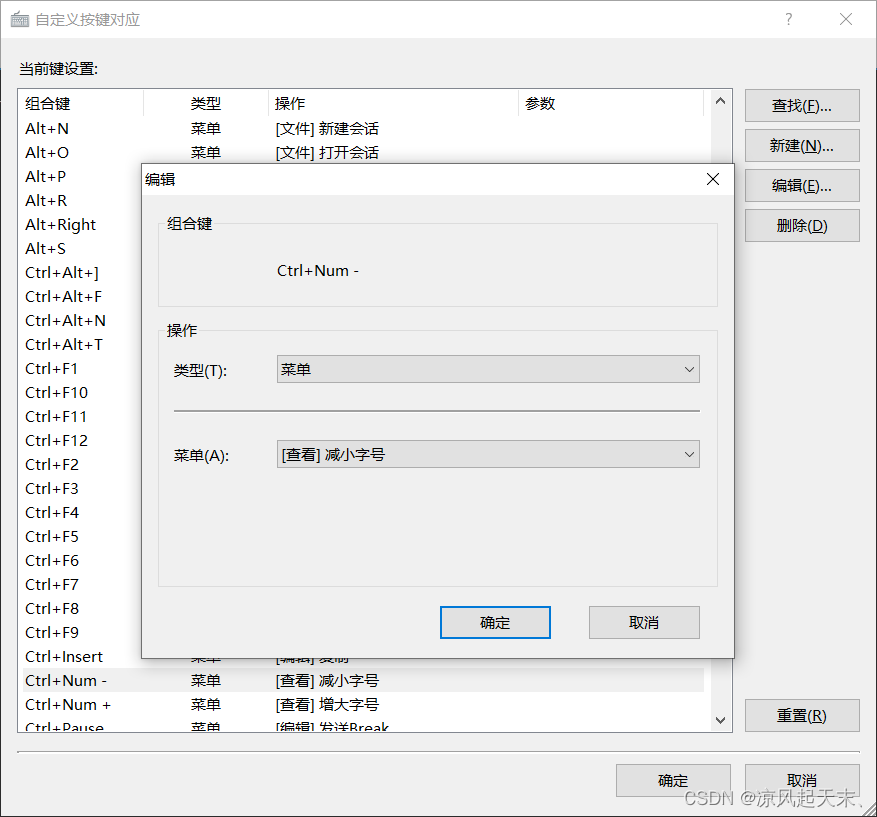
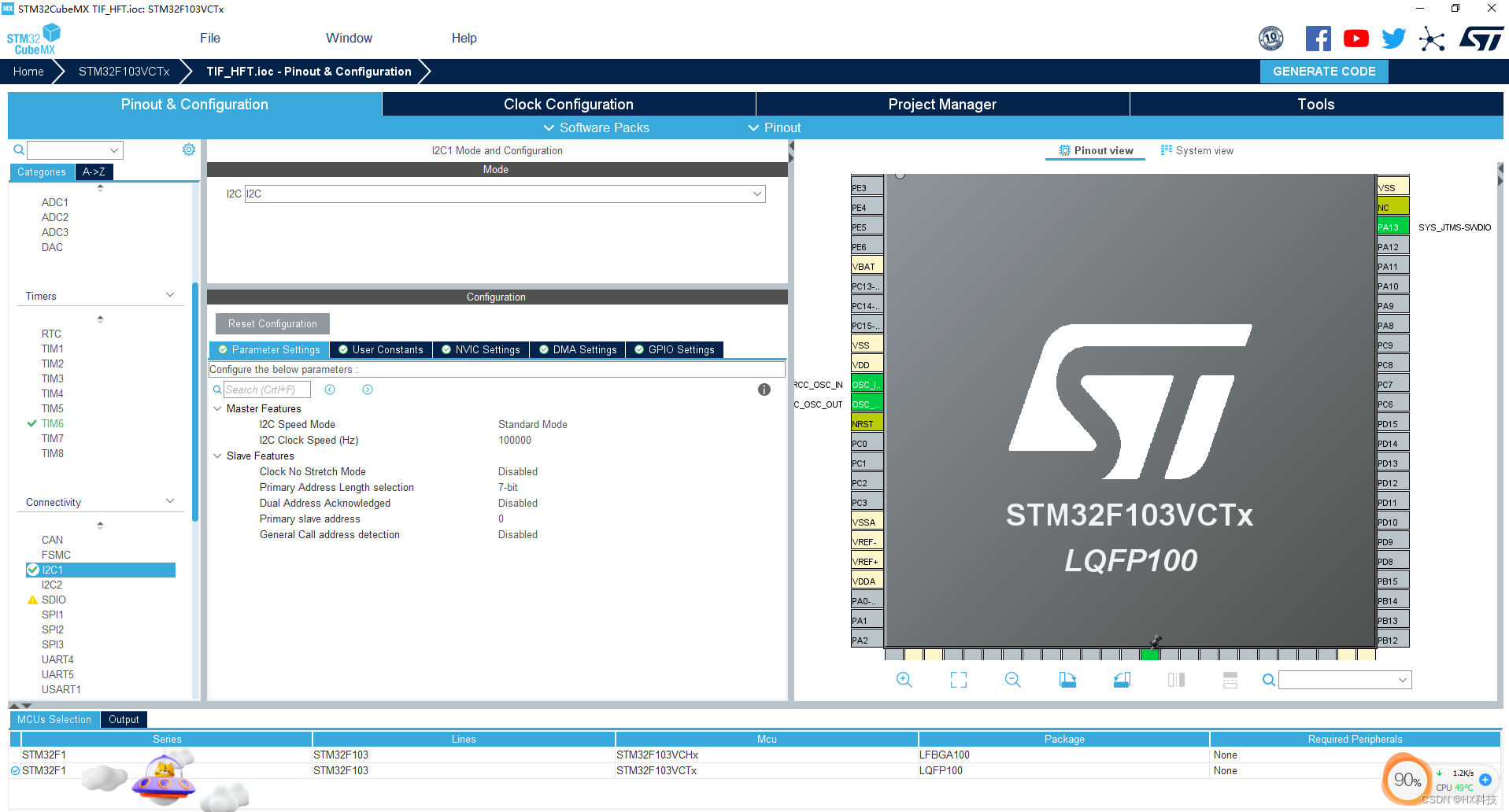
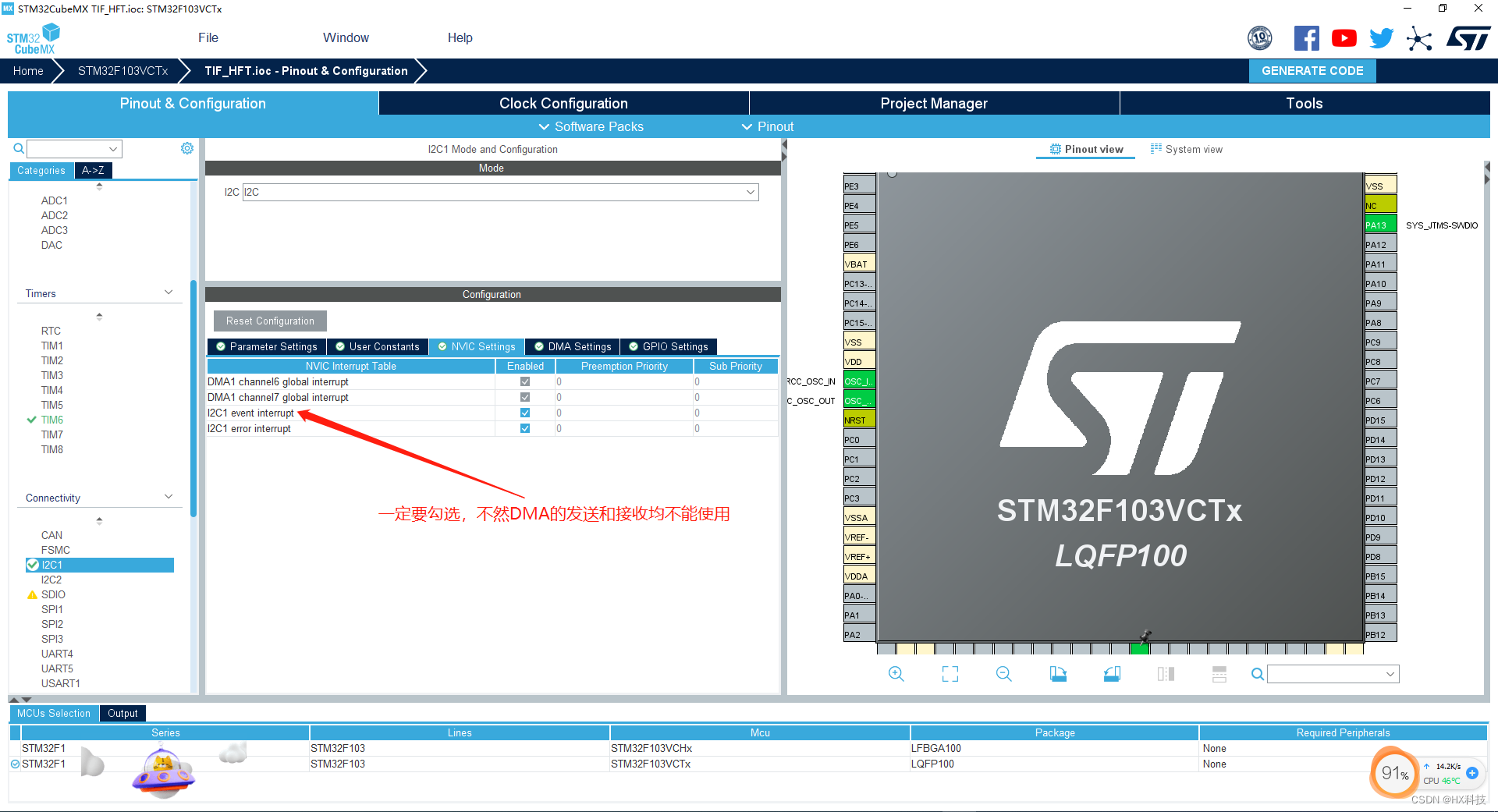
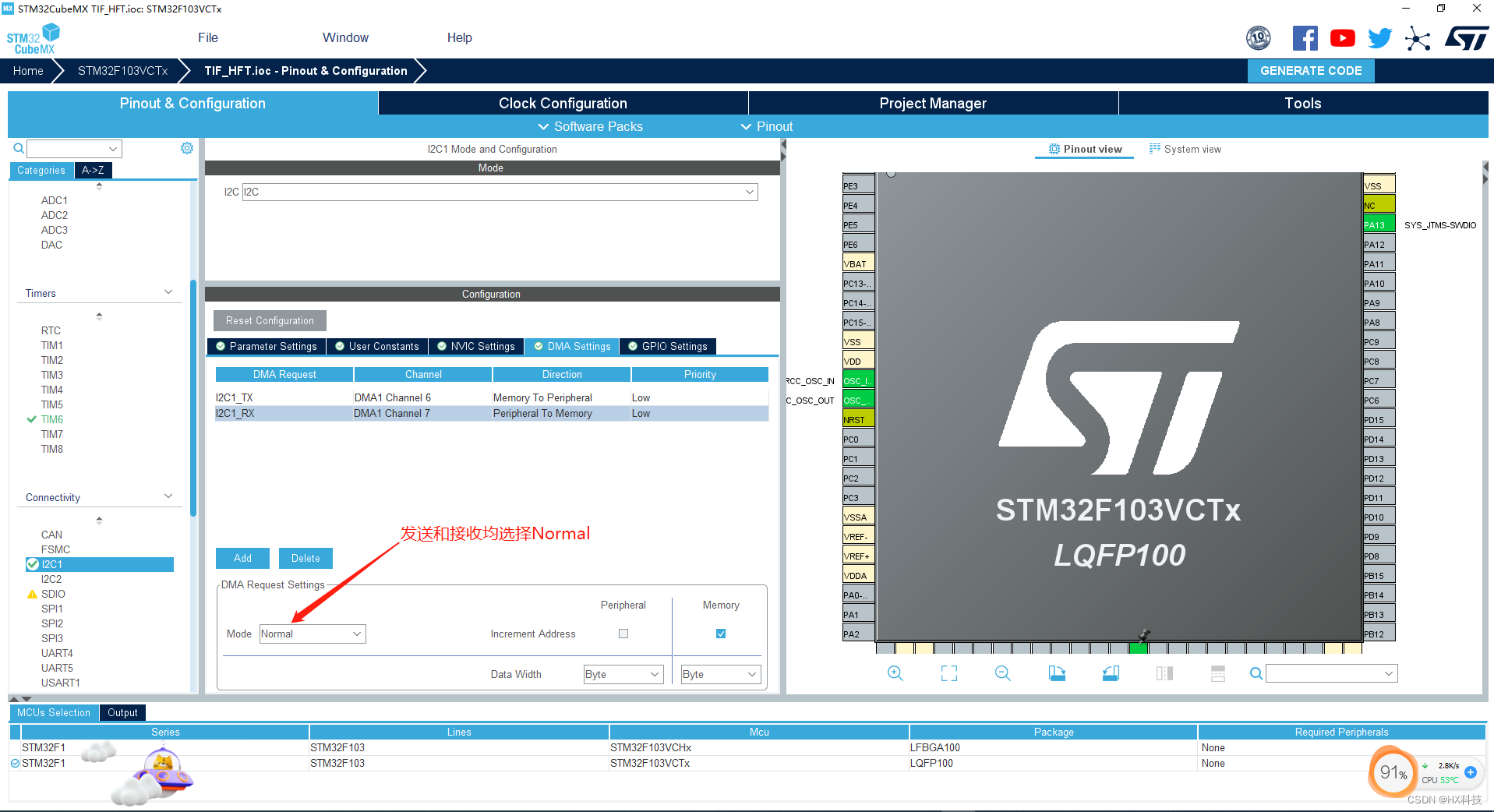
1、stmcubemx配置
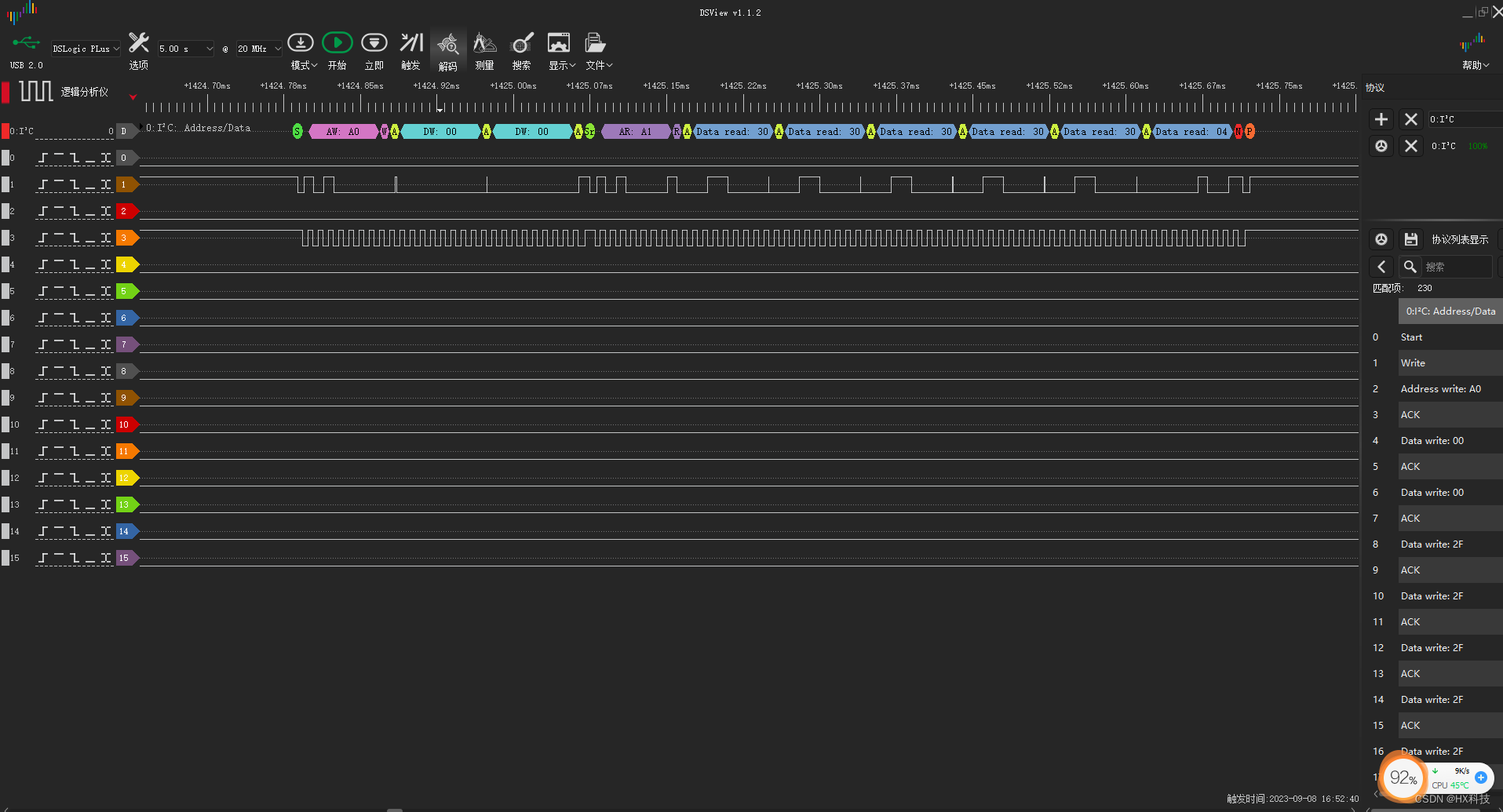
2、逻辑分析仪捕捉发送和接收的过程更直观
写数据时候
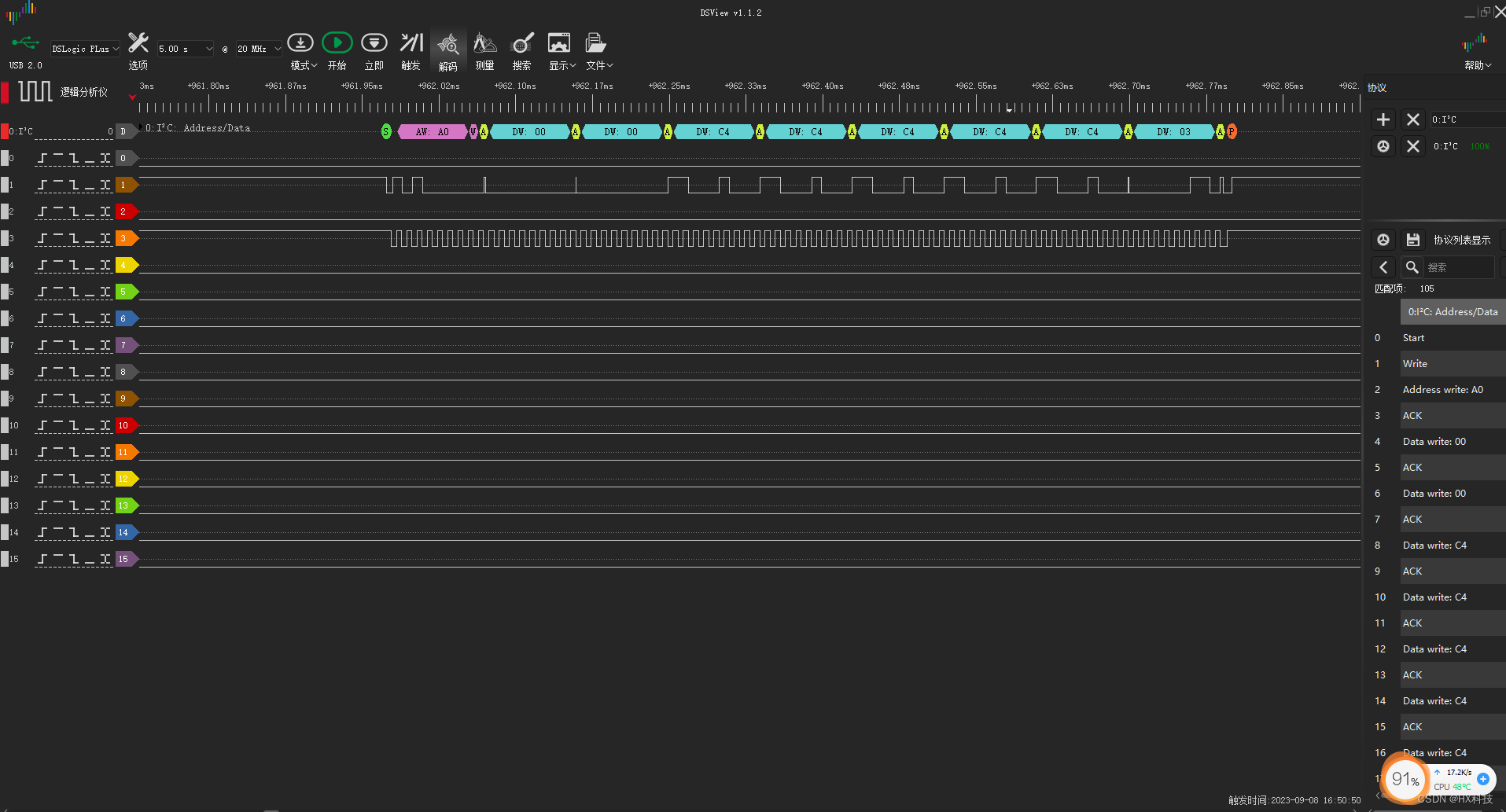
读数据时候
3、应用代码
main.c
int main(void)
{
// SCB->VTOR = FLASH_BASE | 0x14000;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
while (1)
{
}
}
eeprom.h
#ifndef __EEPROM_H
#define __EEPROM_H
#include "main.h"
#include "log.h"
#include "i2c.h"
#include <string.h>
#define AT24C64_ADDR 0xA0
#define AT24C64_ADDR_WRITE 0xA0
#define AT24C64_ADDR_READ 0xA1
typedef struct eeprom24c64_message
{
unsigned char eeprom_flow_number;
unsigned char eeprom_pressure_number;
unsigned char eeprom_pressure_mode;
unsigned char eeprom_buzzer_sound;
unsigned short eeprom_air_number;
}eeprom24c64_message_t;
extern eeprom24c64_message_t eeprom24c64_data;
void eeprom_24c64_init(void);
void eeprom_24c64_task(void);
void eeprom_24c64_write(unsigned short addr,unsigned char *data,unsigned short len);
void eeprom_24c64_read(unsigned short addr,unsigned char *data,unsigned short len);
void eeprom_24c64_write_dma(unsigned short addr,unsigned char *data,unsigned short len);
void eeprom_24c64_read_dma(unsigned short addr,unsigned char *data,unsigned short len);
#endif
eeprom.c
#include "eeprom.h"
eeprom24c64_message_t eeprom24c64_data = {0,0,0,0,0};
eeprom24c64_message_t eeprom24c64_data_old = {0,0,0,0,0};
void eeprom_24c64_init(void)
{
eeprom_24c64_read_dma(0x00,(unsigned char *)&eeprom24c64_data,sizeof(eeprom24c64_data));
HAL_Delay(2);//保证DMA已经把数据从外设搬运到内存中
Debug_printf("init eeprom_flow_number:%d\r\n",eeprom24c64_data.eeprom_flow_number);
Debug_printf("init eeprom_pressure_number:%d\r\n",eeprom24c64_data.eeprom_pressure_number);
Debug_printf("init eeprom_pressure_mode:%d\r\n",eeprom24c64_data.eeprom_pressure_mode);
Debug_printf("init eeprom_buzzer_sound:%d\r\n",eeprom24c64_data.eeprom_buzzer_sound);
Debug_printf("init eeprom_air_number:%d\r\n",eeprom24c64_data.eeprom_air_number);
/********************避免新生产的机器中EEPROM中读出的都是0xff*********************/
if(eeprom24c64_data.eeprom_flow_number == 0xff) eeprom24c64_data.eeprom_flow_number = 0;
if(eeprom24c64_data.eeprom_pressure_number == 0xff) eeprom24c64_data.eeprom_pressure_number = 0;
if(eeprom24c64_data.eeprom_pressure_mode == 0xff) eeprom24c64_data.eeprom_pressure_mode = 0;
if(eeprom24c64_data.eeprom_buzzer_sound == 0xff) eeprom24c64_data.eeprom_buzzer_sound = 0;
if(eeprom24c64_data.eeprom_air_number == 0xffff) eeprom24c64_data.eeprom_air_number = 0;
memcpy(&eeprom24c64_data_old,&eeprom24c64_data,sizeof(eeprom24c64_data));
}
void eeprom_24c64_task(void)
{
if(memcmp(&eeprom24c64_data,&eeprom24c64_data_old,sizeof(eeprom24c64_data)) != 0)
{
eeprom_24c64_write_dma(0x00,(unsigned char *)&eeprom24c64_data,sizeof(eeprom24c64_data));
HAL_Delay(50);
eeprom_24c64_read_dma(0x00,(unsigned char *)&eeprom24c64_data,sizeof(eeprom24c64_data));
// eeprom_24c64_read(0x00,(unsigned char *)&eeprom24c64_data,sizeof(eeprom24c64_data));
// Debug_printf("/*************************************************************/\r\n");
// Debug_printf("eeprom_flow_number:%d\r\n",eeprom24c64_data.eeprom_flow_number);
// Debug_printf("eeprom_pressure_number:%d\r\n",eeprom24c64_data.eeprom_pressure_number);
// Debug_printf("eeprom_pressure_mode:%d\r\n",eeprom24c64_data.eeprom_pressure_mode);
// Debug_printf("eeprom_buzzer_sound:%d\r\n",eeprom24c64_data.eeprom_buzzer_sound);
// Debug_printf("eeprom_air_number:%d\r\n",eeprom24c64_data.eeprom_air_number);
// Debug_printf("/*************************************************************/\r\n");
memcpy(&eeprom24c64_data_old,&eeprom24c64_data,sizeof(eeprom24c64_data));
}
}
void eeprom_24c64_write(unsigned short addr,unsigned char *data,unsigned short len)
{
if(HAL_I2C_Mem_Write(&hi2c1, AT24C64_ADDR_WRITE,addr,I2C_MEMADD_SIZE_16BIT,data,len,100) != HAL_OK)
{
Debug_error("eeprom_24c64_write fail!!!");
}
}
void eeprom_24c64_read(unsigned short addr,unsigned char *data,unsigned short len)
{
if(HAL_I2C_Mem_Read(&hi2c1, AT24C64_ADDR_READ,addr,I2C_MEMADD_SIZE_16BIT,data,len,100) != HAL_OK)
{
Debug_error("eeprom_24c64_read fail!!!");
}
}
void eeprom_24c64_write_dma(unsigned short addr,unsigned char *data,unsigned short len)
{
if(HAL_I2C_Mem_Write_DMA(&hi2c1, AT24C64_ADDR_WRITE,addr,I2C_MEMADD_SIZE_16BIT,data,len) != HAL_OK)
{
Debug_error("eeprom_24c64_write_dma fail!!!");
}
}
void eeprom_24c64_read_dma(unsigned short addr,unsigned char *data,unsigned short len)
{
if(HAL_I2C_Mem_Read_DMA(&hi2c1, AT24C64_ADDR_READ,addr,I2C_MEMADD_SIZE_16BIT,data,len) != HAL_OK)
{
Debug_error("eeprom_24c64_read_dma fail!!!");
}
}
预告一下跨页写入的算法:
#define EEP_MAX_PAGE_SIZE 32 // 最大页写字节数
#define EEP_MAX_ROM_SIZE 8192 // EEROM容量
#define EEP_ADDR_SIZE 2 // EEROM地址字节数
#define EEP_WRITE_DELAY_TIME (OS_TICKS_PER_SEC/10)
#define SYS_HEAD_LEN 7 // 参数版本号,如果EEPROM中的参数版本号和程序中不同则更新参数
// EEPROM各地址分配
#define SYS_HEAD_ADDR 0 // 是否第一次运行标志地址
#define SYS_INFO_ADDR 7 // 系统信息保存地址
//#define PHONE_VOLUME_ADDR 199 // 电话音量保存地址
#define CENTER_NUM_ADDR 200 // 中心号码保存地址
#define PHONE_BOOK_NUM 392 // 呼入呼出电话条数,前四位保存呼入条数,后四位保存呼出条数
#define RING_IN_ADDR 393 // 呼入限制电话保存地址
#define RING_OUT_ADDR 852 // 呼出限制电话保存地址
#define VIRTUAL_PHONE_ADDR 1281 // 虚拟号码保存地址
#define AREA_ALARM_ADDR 1292 // 区域报警信息地址
/*********************************************************************************************************
** 函数名称: EepromRead
** 功能描述: 读EEPROM处理函数,在使用前,必须定义最大页写字节数,并且定义EEPROM的容量
** 输 入:
** buf:读取数据存放地址
** len:要读取的数据长度
** ptr:EEPROM存储位置
** 输 出: 实际读取的数据数目
********************************************************************************************************/
uint16 EepromRead(uint8 *buf , uint16 len , uint16 ptr)
{
uint8 EeromAddr[2];
EeromAddr[0] = ptr >> 8;
EeromAddr[1] = ptr & 0xff;
return(I2cRead(AT24CXX , buf , EeromAddr , EEP_ADDR_SIZE , len));
}
/*********************************************************************************************************
** 函数名称: EepromWrite
** 功能描述: 写EEPROM处理函数,在使用前,必须定义最大页写字节数,并且定义EEPROM的容量
** 输 入:
** buf:所要发的数据
** len:要发的数据长度
** ptr:EEPROM存储位置
** 输 出: 实际所发的数据数目
********************************************************************************************************/
uint16 EepromWrite(uint8 *buf , uint16 len , uint16 ptr)
{
uint8 bufTemp[EEP_MAX_PAGE_SIZE + EEP_ADDR_SIZE] , i , j = 0;
uint8 flowSize , flowLen;
uint16 sizeTemp , lenTemp = 0;
if((ptr + len) > (EEP_MAX_ROM_SIZE - 1)) // EEPROM溢出保护
return 0;
flowSize = ptr % EEP_MAX_PAGE_SIZE;
if(flowSize) // 如果不是在页的起点
{
flowLen = EEP_MAX_PAGE_SIZE - flowSize; // 当前页可写长度
if(flowLen < len) // 所要写的数据将跨页
{
bufTemp[0] = ptr >> 8; // 地址高位
bufTemp[1] = ptr; // 地址低位
for(i = 0;i < flowLen;i++)
bufTemp[i + EEP_ADDR_SIZE] = buf[i];
ptr += flowLen; // 下次将写入的地址
len -= flowLen; // 剩余未写数据的长度
sizeTemp = I2cWrite(AT24CXX , bufTemp , flowLen + EEP_ADDR_SIZE);//本次写入的长度
OSTimeDly(EEP_WRITE_DELAY_TIME); // 写入延时
lenTemp = lenTemp + sizeTemp - EEP_ADDR_SIZE;
}
else//所要写的数据未能跨页
{
bufTemp[0] = ptr >> 8; // 地址高位
bufTemp[1] = ptr; // 地址低位
for(i = 0;i < len;i++)
bufTemp[i + EEP_ADDR_SIZE] = buf[i];
sizeTemp = I2cWrite(AT24CXX , bufTemp , len + EEP_ADDR_SIZE);
OSTimeDly(EEP_WRITE_DELAY_TIME);
return (sizeTemp - EEP_ADDR_SIZE); // 完毕返回
}
}
while(len / EEP_MAX_PAGE_SIZE) //剩余未写数据长度仍大于整页长度
{
bufTemp[0] = ptr >> 8; // 地址高位
bufTemp[1] = ptr; // 地址低位
j = lenTemp;
for(i = 0;i < EEP_MAX_PAGE_SIZE;i++)
bufTemp[i + EEP_ADDR_SIZE] = buf[j + i];
ptr += EEP_MAX_PAGE_SIZE;
j += EEP_MAX_PAGE_SIZE; //
len -= EEP_MAX_PAGE_SIZE;
sizeTemp = I2cWrite(AT24CXX , bufTemp , EEP_MAX_PAGE_SIZE + EEP_ADDR_SIZE);
OSTimeDly(EEP_WRITE_DELAY_TIME);
lenTemp = lenTemp + sizeTemp - EEP_ADDR_SIZE;
}
if(len) // 剩余未写数据长度不足整页长度
{
bufTemp[0] = ptr >> 8; // 地址高位
bufTemp[1] = ptr; // 地址低位
j = lenTemp;
for(i = 0;i < len;i++)
bufTemp[i + EEP_ADDR_SIZE] = buf[j + i];
sizeTemp = I2cWrite(AT24CXX , bufTemp , len + EEP_ADDR_SIZE);
OSTimeDly(EEP_WRITE_DELAY_TIME);
lenTemp = lenTemp + sizeTemp - EEP_ADDR_SIZE;
}
return lenTemp; // 返回写入的数据数目
}