这两天为了一个小汇报搞得突击。
由于认真突击了n小时,所以上课听得也认真。外加这老师讲得蛮清楚的,所以整理个笔记。
图像三维重建的思路:
由三维形成图片
单目、双目或者多目视觉测量
小孔成像原理
由图像还原三维
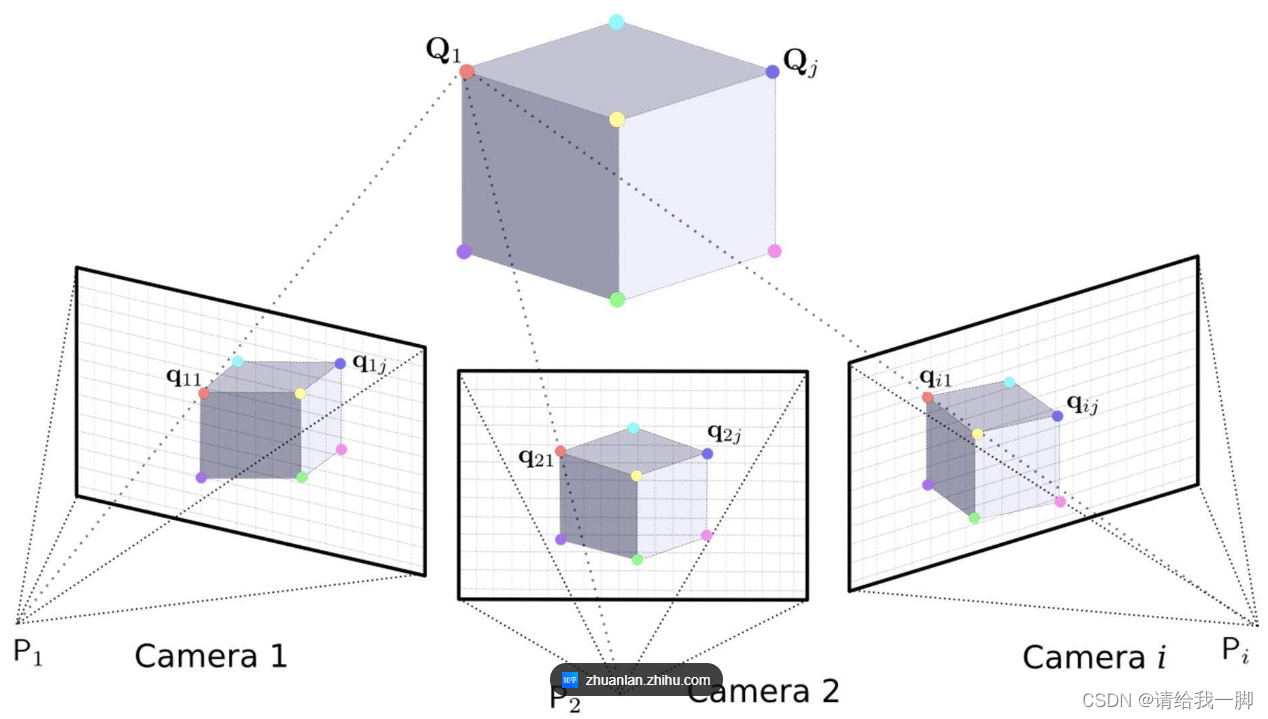
看上面的图,已知三幅图像上的点坐标q11,q21和qi1,他们和原物体点的连线Q1
只需要求得三条连线的方程就能解出点Q的坐标。
而求线的方程,只需要知道点坐标q,以及连线的法向量。
因此,怎么重建捏
先空三,求解相机的内外方位元素,外方位元素对应相机的位置和姿态,内方位元素对应相机的焦距和一些固有属性
在这一步中包含了,特征匹配步骤
然后再利用求得的内外方位元素,以及控制点坐标,进行前方交会,获得绝对的三维坐标。
归根到底,还是上面那个图
SfM(Structure from Model)
一种稀疏点云的建立方法。主要在开源软件中用得多,比如colmap,openmvg,openmvs等
那么SfM是啥捏。
https://www.mathworks.com/help/vision/ug/structure-from-motion.html
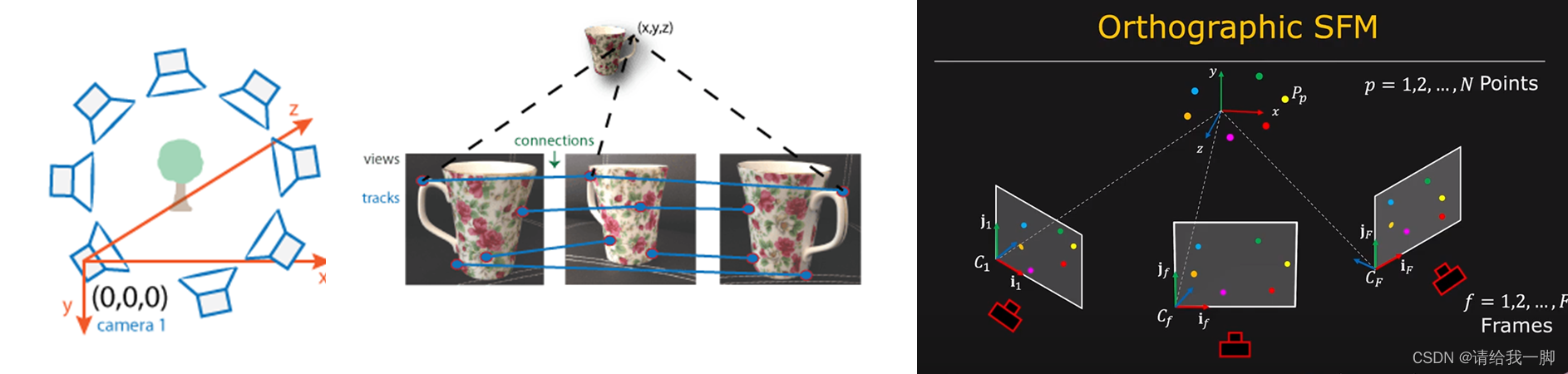
图3截取自油管视频,,搜索SfM就有,一个系列
假设相机1位于原点,也就是图所示。z轴方向为光轴方向。
先使用相机1和相机2拍的图像1和图像2,如中间图,利用一些特征匹配技术进行匹配,求解相机的位姿,也就是求解空三
然后根据得到的矩阵参数,计算相机1和相机2之间的位姿。
下一步,又去判断相机2和相机3的位姿,相机4和相机3的位姿,依次计算,最终获得一个整体的位姿关系和特征匹配点,而所依照的坐标系,是一开始相机1的坐标系。
这样一个相机一个相机依次添加,叫,增量式SfM
而一次性把所有相机都添加进行求解,叫,全局式SfM
注意,SfM,生成的只是稀疏点云
现在再回到这个流程图。
面片就是生成的不规则三角网TIN组成的白膜。好处有三:一是稳定三角形,二是可以表示多样化的形状,三是可以计算表面积
另外,流程中 存在着配准误差,校准误差等,累积形成漂移,需要处理
激光三维重建
这个目前也有。但我了解不多。