目录
1.可分离滤波的原理
2.可分离滤波函数sepFilter2D()
3.示例代码
1.可分离滤波的原理
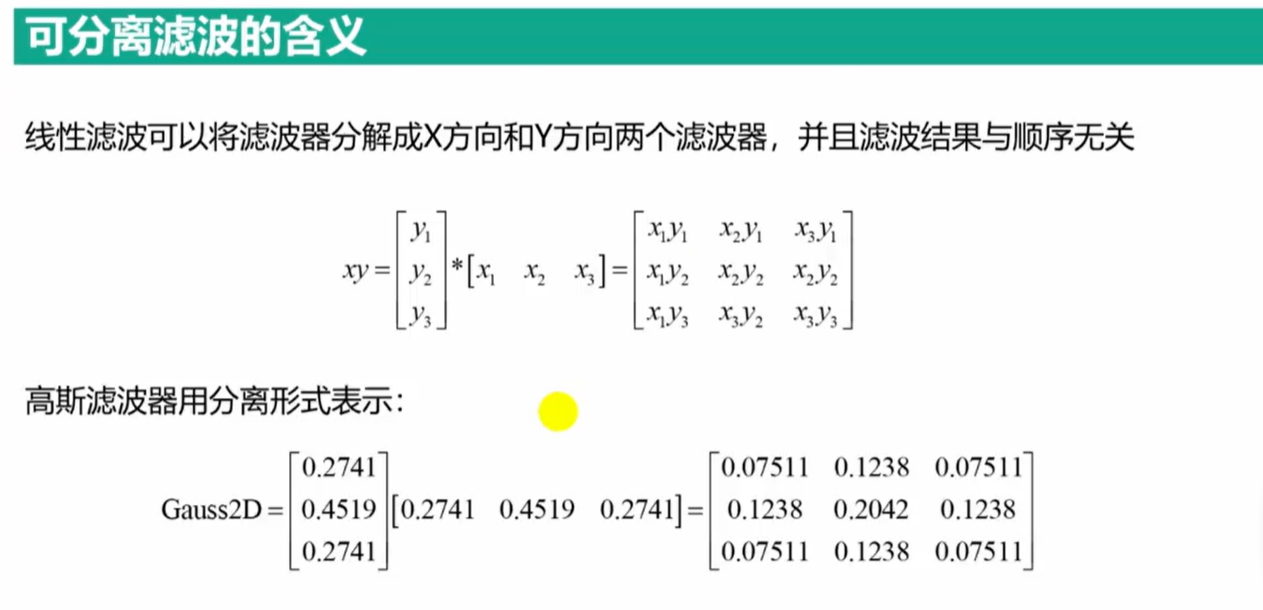
可分离滤波的原理基于滤波器的可分离性。对于一个二维滤波器,如果它可以表示为水平方向和垂直方向两个一维滤波器的卷积,那么它就是可分离的。也就是说,一个二维滤波器可以通过两次一维卷积来实现,分别在水平和垂直方向进行滤波。
2.可分离滤波函数sepFilter2D()
void cv::sepFilter2D ( InputArray src,
OutputArray dst,
int ddepth,
InputArray kernelX,
InputArray kernelY,
Point anchor = point(-1,-1),
double delta =0 ,
int borderType = BORDER_DEFAULT
)
- src:待滤波图像
- dst:输出图像,与输入图像src具有相同的尺寸、通道数和数据类型
- ddepth: 输出图像的数据类型(深度)。
- kernelX:X方向的滤波器
- kernelY:Y方向的滤波器
- anchor:内核的基准点(锚点),其默认值为(-1,-1)代表内核基准点位于kernel的中心位置delta: 偏值,在计算结果中加上偏值。
- borderType:像素外推法选择标志。
3.示例代码
展示如何使用可分离滤波在图像上应用高斯滤波:
//可分离滤波
void Separable_filtering(Mat image){
// 定义滤波器大小和标准差
int ksize = 3;
double sigma = 1.0;
// 获取水平方向和垂直方向的高斯滤波器
cv::Mat kernelX = cv::getGaussianKernel(ksize, sigma);
cv::Mat kernelY = cv::getGaussianKernel(ksize, sigma);
// 计算水平方向和垂直方向上的一维滤波器
cv::Mat kernelXY = kernelX * kernelY.t();
// 执行可分离滤波
cv::Mat result;
cv::sepFilter2D(image, result, -1, kernelX, kernelY);
}在上述示例中,cv::getGaussianKernel()函数用于获取高斯滤波器。ksize参数表示滤波器的大小,sigmaX和sigmaY参数表示X和Y方向上的标准差。
通过将一维滤波器应用于图像的两个方向,并使用cv::sepFilter2D()函数将它们结合起来,我们可以实现高效的可分离滤波操作。