1 使用设备树给DM9000网卡_触摸屏指定中断
1.1 修改方法
根据设备节点的compatible属性,在驱动程序中构造/注册 platform_driver,在 platform_driver 的 probe 函数中获得中断资源。
1.2 实验方法
以下是修改好的代码:第6课第1节_网卡_触摸屏驱动\001th_dm9000\dm9dev9000c.c
第6课第1节_网卡_触摸屏驱动\002th_touchscreen\s3c_ts.c
分别上传到内核如下目录:
drivers/net/ethernet/davicom
drivers/input/touchscreen(1)编译内核
(2)使用新的uImage启动
(3)测试网卡
ifconfig eth0 192.168.1.101
ping 192.168.1.1(4)测试触摸屏
hexdump /dev/evetn0 // 然后点击触摸屏1.3 图示
(1)图1
(2)图2
(3)图3
2 在设备树中时钟的简单使用
2.1 笔记
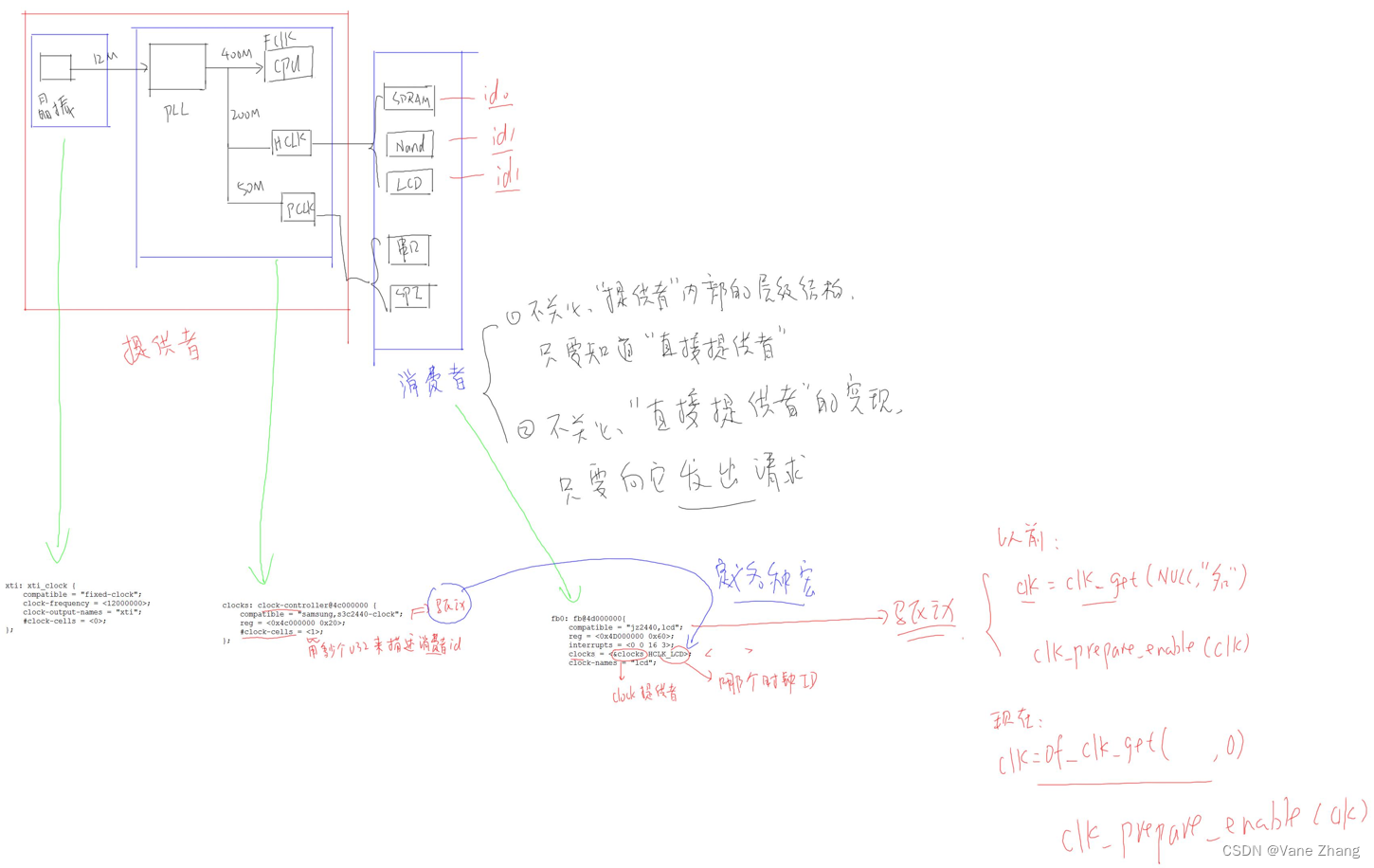
(1)设备树中定义了各种时钟,在文档中称之为"Clock providers",比如:
clocks: clock-controller@4c000000 {
compatible = "samsung,s3c2440-clock";
reg = <0x4c000000 0x20>;
#clock-cells = <1>; // 想使用这个clocks时要提供1个u32来指定它, 比如选择这个clocks中发出的LCD时钟、PWM时钟
};(2)设备需要时钟时,它是"Clock consumers",它描述了使用哪一个"Clock providers"中的哪一个时钟(id),比如:
fb0: fb@4d000000{
compatible = "jz2440,lcd";
reg = <0x4D000000 0x60>;
interrupts = <0 0 16 3>;
clocks = <&clocks HCLK_LCD>; // 使用clocks即clock-controller@4c000000中的HCLK_LCD
};(3)驱动中获得/使能时钟:
// 确定时钟个数
int nr_pclks = of_count_phandle_with_args(dev->of_node, "clocks",
"#clock-cells");
// 获得时钟
for (i = 0; i < nr_pclks; i++) {
struct clk *clk = of_clk_get(dev->of_node, i);
}
// 使能时钟
clk_prepare_enable(clk);
// 禁止时钟
clk_disable_unprepare(clk);(4)参考文档:
- 内核 Documentation/devicetree/bindings/clock/clock-bindings.txt
- 内核 Documentation/devicetree/bindings/clock/samsung,s3c2410-clock.txt
2.2 图示

3 在设备树中pinctrl的简单使用
3.1 笔记
3.1.1 几个概念
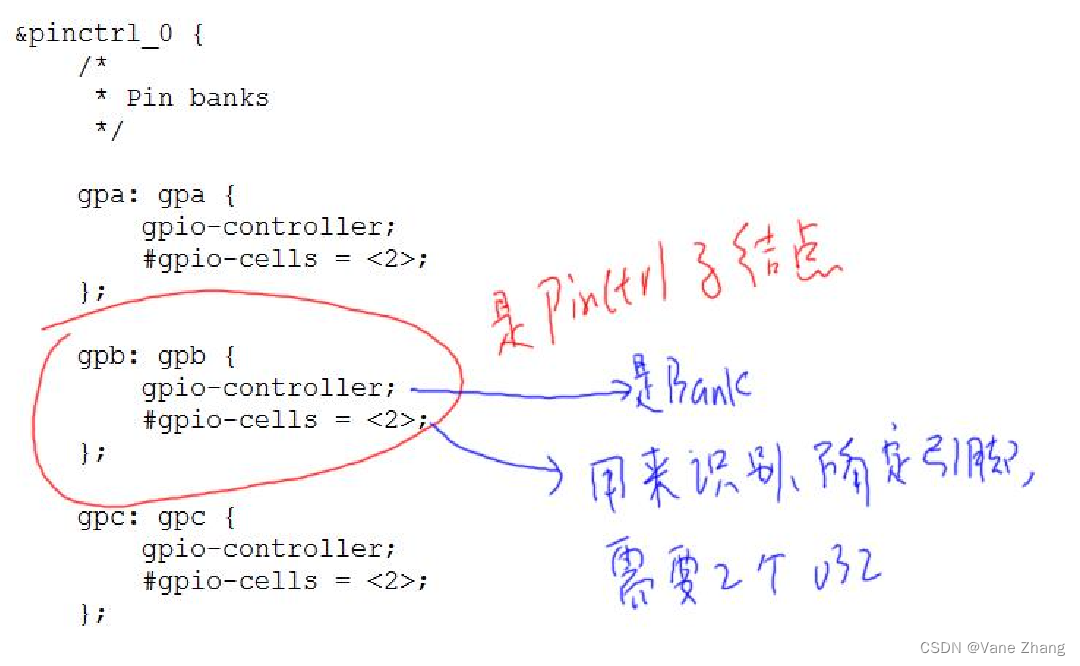
(1)Bank
以引脚名为依据, 这些引脚分为若干组, 每组称为一个Bank,比如s3c2440里有GPA、GPB、GPC等Bank,每个Bank中有若干个引脚,比如GPA0,GPA1, ...,GPC0,GPC1,... 等引脚。
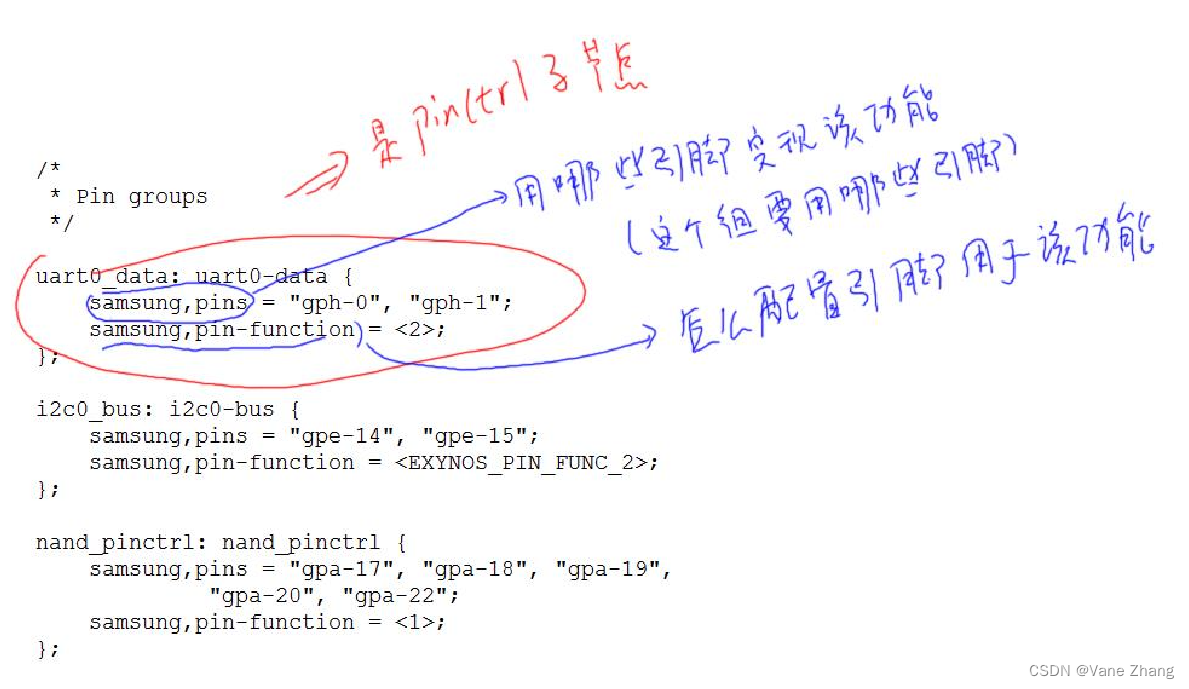
(2) Group
以功能为依据, 具有相同功能的引脚称为一个Group,比如s3c2440中串口0的TxD、RxD引脚使用 GPH2,GPH3,那这2个引脚可以列为一组,比如s3c2440中串口0的流量控制引脚使用GPH0,GPH1,那这2个引脚也可以列为一组。
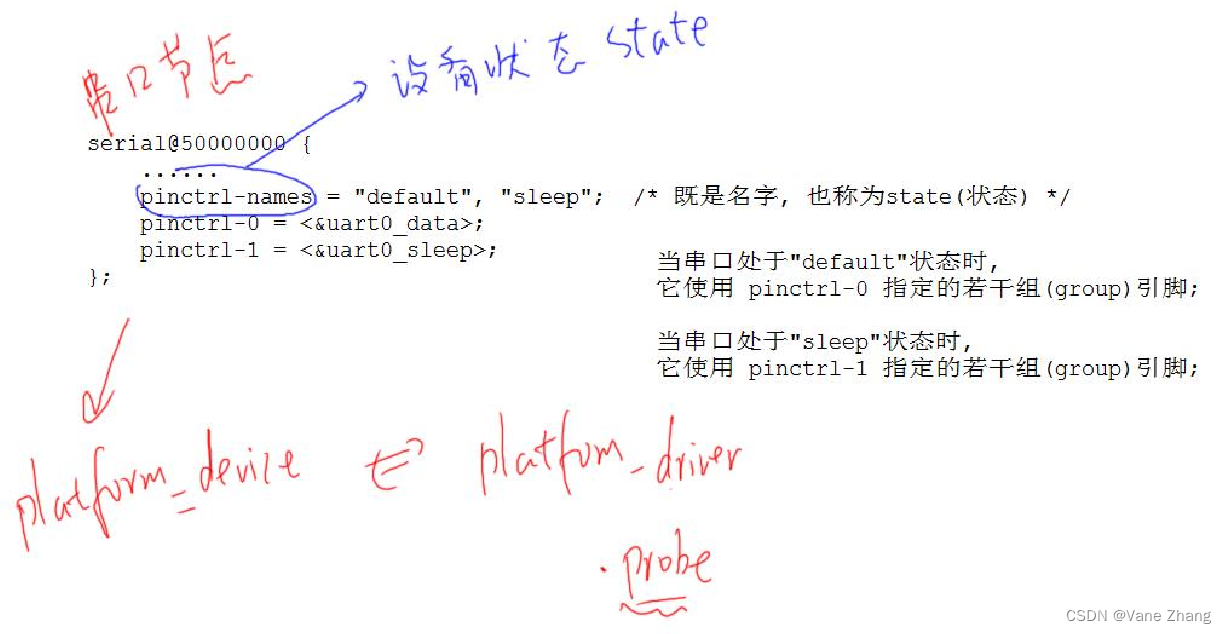
(3)State
设备的某种状态,比如内核自己定义的"default","init","idel","sleep"状态;也可以是其他自己定义的状态,比如串口的"flow_ctrl"状态(使用流量控制)。设备处于某种状态时,它可以使用若干个Group引脚。
3.1.2 设备树中 pinctrl 节点
(1)它定义了各种 pin bank,比如s3c2440有GPA,GPB,GPC,...,GPB各种BANK,每个BANK中有若干引脚:
pinctrl_0: pinctrl@56000000 {
reg = <0x56000000 0x1000>;
gpa: gpa {
gpio-controller;
#gpio-cells = <2>; /* 以后想使用gpa bank中的引脚时, 需要2个u32来指定引脚 */
};
gpb: gpb {
gpio-controller;
#gpio-cells = <2>;
};
gpc: gpc {
gpio-controller;
#gpio-cells = <2>;
};
gpd: gpd {
gpio-controller;
#gpio-cells = <2>;
};
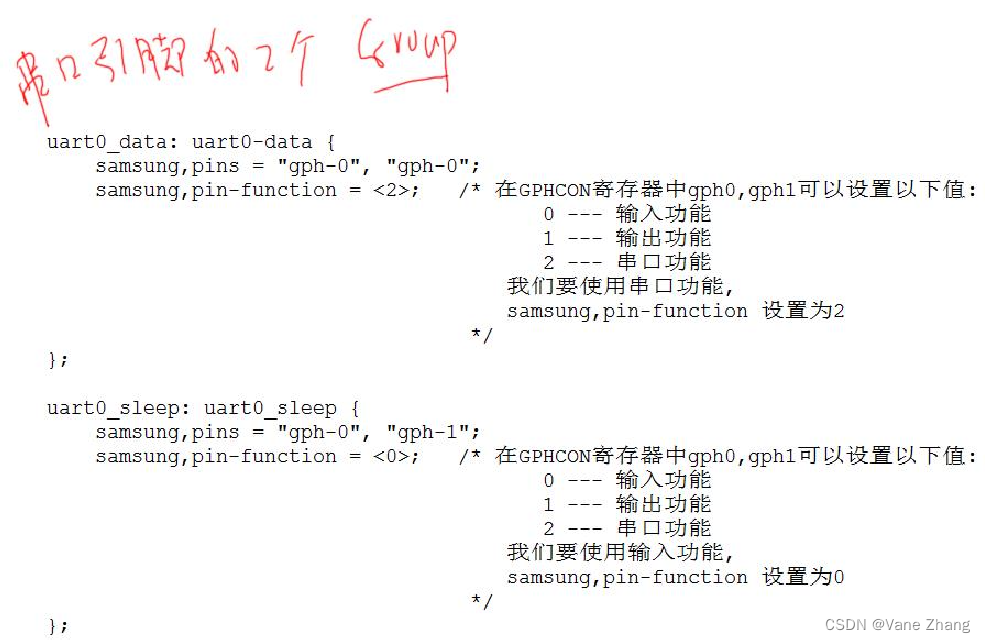
};(2)它还定义了各种group(组合),某种功能所涉及的引脚称为group,比如串口0要用到2个引脚:gph0,gph1:
uart0_data: uart0-data {
samsung,pins = "gph-0", "gph-0";
samsung,pin-function = <2>; /* 在GPHCON寄存器中gph0,gph1可以设置以下值:
0 --- 输入功能
1 --- 输出功能
2 --- 串口功能
我们要使用串口功能,
samsung,pin-function 设置为2
*/
};
uart0_sleep: uart0_sleep {
samsung,pins = "gph-0", "gph-1";
samsung,pin-function = <0>; /* 在GPHCON寄存器中gph0,gph1可以设置以下值:
0 --- 输入功能
1 --- 输出功能
2 --- 串口功能
我们要使用输入功能,
samsung,pin-function 设置为0
*/
};
3.1.3 设备节点中要使用某一个 pin group:
serial@50000000 {
......
pinctrl-names = "default", "sleep"; /* 既是名字, 也称为state(状态) */
pinctrl-0 = <&uart0_data>;
pinctrl-1 = <&uart0_sleep>;
};
# pinctrl-names中定义了2种state: default 和 sleep,
# default 对应的引脚是: pinctrl-0, 它指定了使用哪些pin group: uart0_data
# sleep 对应的引脚是: pinctrl-1, 它指定了使用哪些pin group: uart0_sleep3.1.4 platform_device,platform_driver匹配时:
really_probe:
/* If using pinctrl, bind pins now before probing */
ret = pinctrl_bind_pins(dev);
dev->pins->default_state = pinctrl_lookup_state(dev->pins->p,
PINCTRL_STATE_DEFAULT); /* 获得"default"状态的pinctrl */
dev->pins->init_state = pinctrl_lookup_state(dev->pins->p,
PINCTRL_STATE_INIT); /* 获得"init"状态的pinctrl */
ret = pinctrl_select_state(dev->pins->p, dev->pins->init_state); /* 优先设置"init"状态的引脚 */
ret = pinctrl_select_state(dev->pins->p, dev->pins->default_state); /* 如果没有init状态, 则设置"default"状态的引脚 */
......
ret = drv->probe(dev);所以:如果设备节点中指定了pinctrl,在对应的probe函数被调用之前,先"bind pins",即先绑定、设置引脚。
3.1.5 驱动中想选择、设置某个状态的引脚:
devm_pinctrl_get_select_default(struct device *dev); // 使用"default"状态的引脚
pinctrl_get_select(struct device *dev, const char *name); // 根据name选择某种状态的引脚
pinctrl_put(struct pinctrl *p); // 不再使用, 退出时调用3.1.6 参考文档
- 内核 Documentation/devicetree/bindings/pinctrl/samsung-pinctrl.txt
3.2 图示
(1)Bank
(2)Group
(3)State
(4)设备结点
4 使用设备树给LCD指定各种参数
4.1 参考文章
讓TQ2440也用上設備樹(1) - 摩斯电码 - 博客园
4.2 参考代码
https://github.com/pengdonglin137/linux-4.9/blob/tq2440_dt/drivers/video/fbdev/s3c2410fb.c
4.3 实验方法
(1)替换dts文件
把"jz2440_irq.dts" 放入内核 arch/arm/boot/dts目录
(2)替换驱动文件
把"s3c2410fb.c" 放入内核 drivers/video/fbdev/ 目录,修改内核 drivers/video/fbdev/Makefile:
obj-$(CONFIG_FB_S3C2410) += lcd_4.3.o改为:
obj-$(CONFIG_FB_S3C2410) += s3c2410fb.o(3)编译驱动、编译dtbs
export PATH=PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/work/system/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabi/bin
cp config_ok .config
make uImage // 生成 arch/arm/boot/uImage
make dtbs // 生成 arch/arm/boot/dts/jz2440_irq.dtb(4)使用上述uImage,dtb启动内核即可看到LCD有企鹅出现
4.4 设备树相关
(1)设备树中的描述
fb0: fb@4d000000{
compatible = "jz2440,lcd";
reg = <0x4D000000 0x60>;
interrupts = <0 0 16 3>;
clocks = <&clocks HCLK_LCD>; /* a. 时钟 */
clock-names = "lcd";
pinctrl-names = "default"; /* b. pinctrl */
pinctrl-0 = <&lcd_pinctrl &lcd_backlight &gpb0_backlight>;
status = "okay";
/* c. 根据LCD引脚特性设置lcdcon5, 指定lcd时序参数 */
lcdcon5 = <0xb09>;
type = <0x60>;
width = /bits/ 16 <480>;
height = /bits/ 16 <272>;
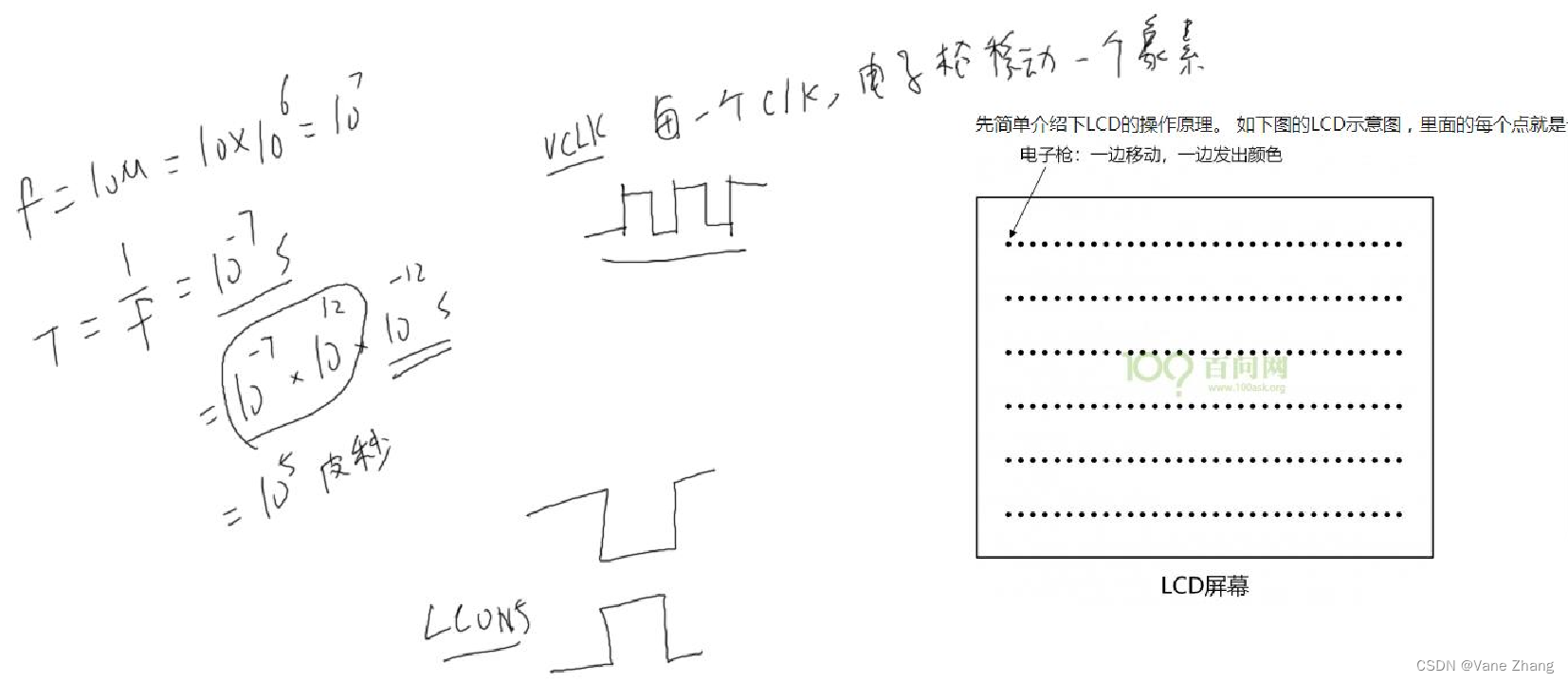
pixclock = <100000>; /* 单位: ps, 10^-12 S, */
xres = /bits/ 16 <480>;
yres = /bits/ 16 <272>;
bpp = /bits/ 16 <16>;
left_margin = /bits/ 16 <2>;
right_margin =/bits/ 16 <2>;
hsync_len = /bits/ 16 <41>;
upper_margin = /bits/ 16 <2>;
lower_margin = /bits/ 16 <2>;
vsync_len = /bits/ 16 <10>;
};
&pinctrl_0 {
gpb0_backlight: gpb0_backlight {
samsung,pins = "gpb-0";
samsung,pin-function = <1>;
samsung,pin-val = <1>;
};
};4.5 代码中的处理
(1)时钟
info->clk = of_clk_get(dev->of_node, 0);
clk_prepare_enable(info->clk);(2)pinctrl
代码中无需处理,在platform_device/platform_driver匹配之后就会设置"default"状态对应的pinctrl
(3)根据LCD引脚特性设置lcdcon5,指定lcd时序参数,直接读设备树节点中的各种属性值, 用来设置驱动参数:
of_property_read_u32(np, "lcdcon5", (u32 *)(&display->lcdcon5));
of_property_read_u32(np, "type", &display->type);
of_property_read_u16(np, "width", &display->width);
of_property_read_u16(np, "height", &display->height);
of_property_read_u32(np, "pixclock", &display->pixclock);
of_property_read_u16(np, "xres", &display->xres);
of_property_read_u16(np, "yres", &display->yres);
of_property_read_u16(np, "bpp", &display->bpp);
of_property_read_u16(np, "left_margin", &display->left_margin);
of_property_read_u16(np, "right_margin", &display->right_margin);
of_property_read_u16(np, "hsync_len", &display->hsync_len);
of_property_read_u16(np, "upper_margin", &display->upper_margin);
of_property_read_u16(np, "lower_margin", &display->lower_margin);
of_property_read_u16(np, "vsync_len", &display->vsync_len);4.6 图示
 5 补充笔记
5 补充笔记
5.1 确定内核的虚拟地址、物理地址的关键信息
vmlinux虚拟地址的确定,内核源码:
.config :
CONFIG_PAGE_OFFSET=0xC0000000
arch/arm/include/asm/memory.h
#define PAGE_OFFSET UL(CONFIG_PAGE_OFFSET)
arch/arm/Makefile
textofs-y := 0x00008000
TEXT_OFFSET := $(textofs-y)
arch/arm/kernel/vmlinux.lds.S:
. = PAGE_OFFSET + TEXT_OFFSET; // // 即0xC0000000+0x00008000 = 0xC0008000, vmlinux的虚拟地址为0xC0008000
arch/arm/kernel/head.S
#define KERNEL_RAM_VADDR (PAGE_OFFSET + TEXT_OFFSET) // 即0xC0000000+0x00008000 = 0xC0008000
vmlinux物理地址的确定:
内核源码:
arch/arm/mach-s3c24xx/Makefile.boot :
zreladdr-y += 0x30008000 // zImage自解压后得到vmlinux, vmlinux的存放位置
params_phys-y := 0x30000100 // tag参数的存放位置, 使用dtb时不再需要tag
arch/arm/boot/Makefile:
ZRELADDR := $(zreladdr-y)
arch/arm/boot/Makefile:
UIMAGE_LOADADDR=$(ZRELADDR)
scripts/Makefile.lib:
UIMAGE_ENTRYADDR ?= $(UIMAGE_LOADADDR)
// 制作uImage的命令, uImage = 64字节的头部 + zImage, 头部信息中含有内核的入口地址(就是vmlinux的物理地址)
cmd_uimage = $(CONFIG_SHELL) $(MKIMAGE) -A $(UIMAGE_ARCH) -O linux \
-C $(UIMAGE_COMPRESSION) $(UIMAGE_OPTS-y) \
-T $(UIMAGE_TYPE) \
-a $(UIMAGE_LOADADDR) -e $(UIMAGE_ENTRYADDR) \
-n $(UIMAGE_NAME) -d $(UIMAGE_IN) $(UIMAGE_OUT)5.2 参考
00-Linux设备树系列-简介 - 飞翔de刺猬 - CSDN博客.html
https://blog.csdn.net/lhl_blog/article/details/82387486
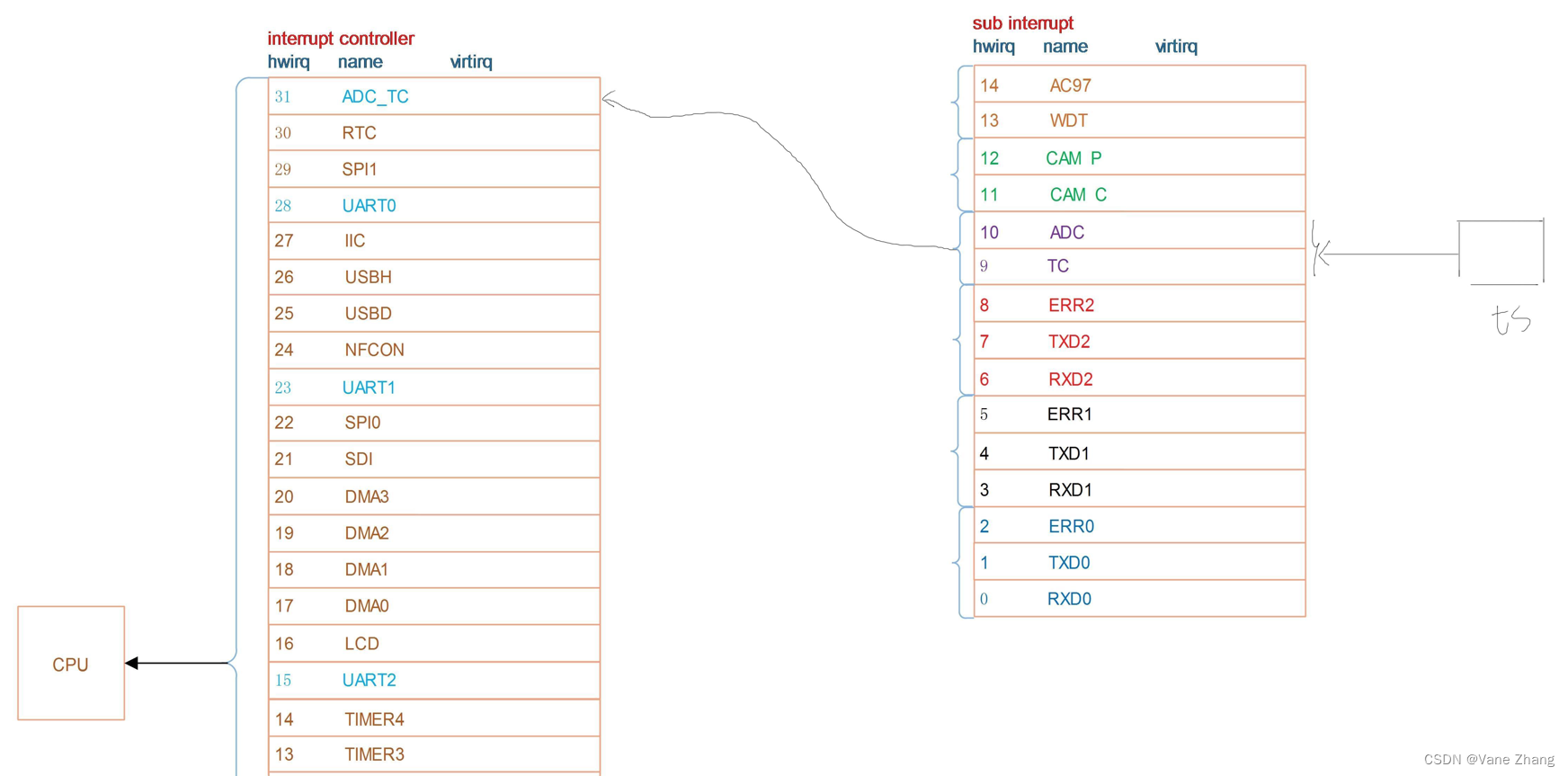
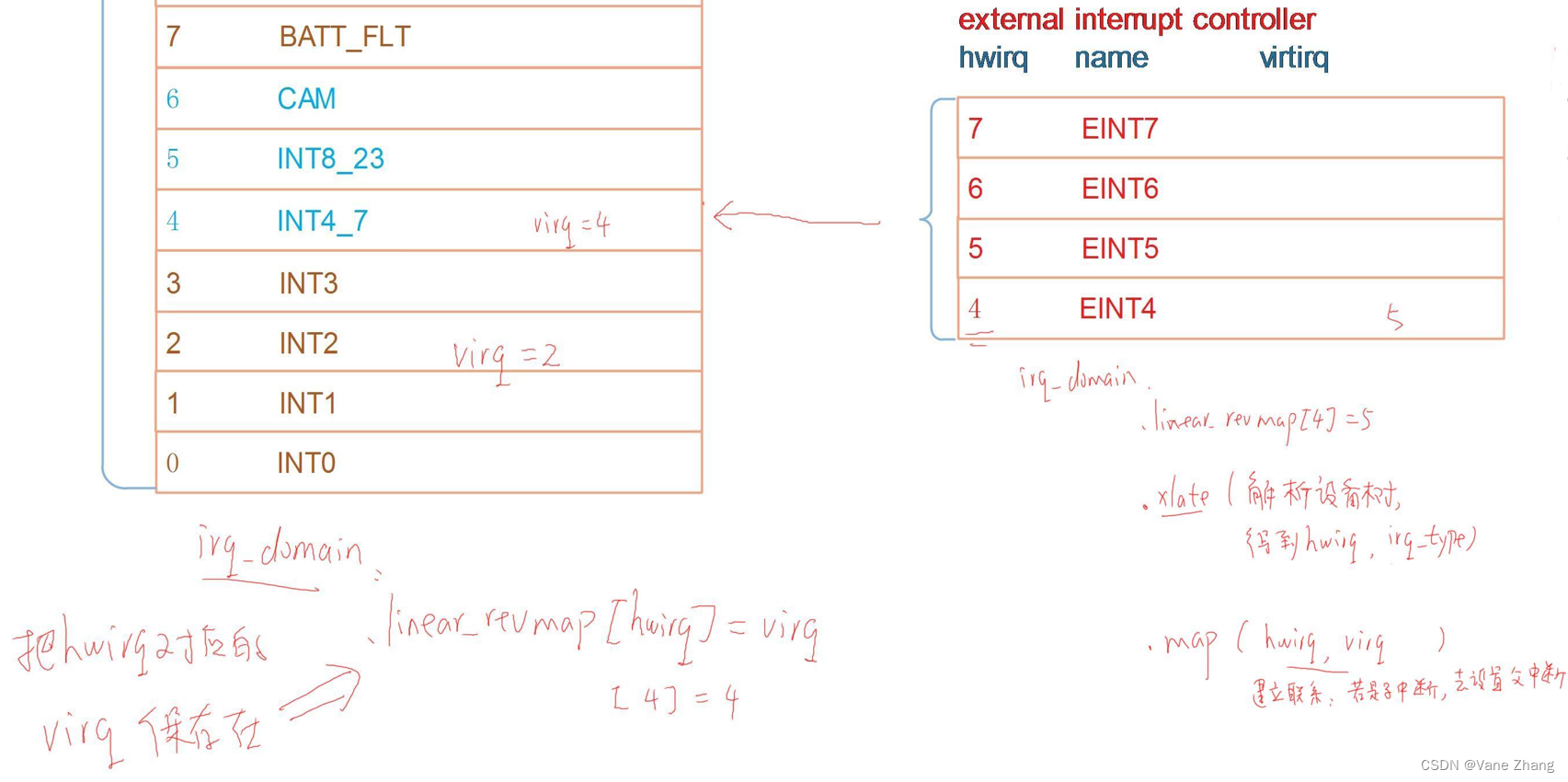
Linux kernel的中断子系统之(二):IRQ Domain介绍_搜狐科技_搜狐网.html
http://www.sohu.com/a/201793206_467784
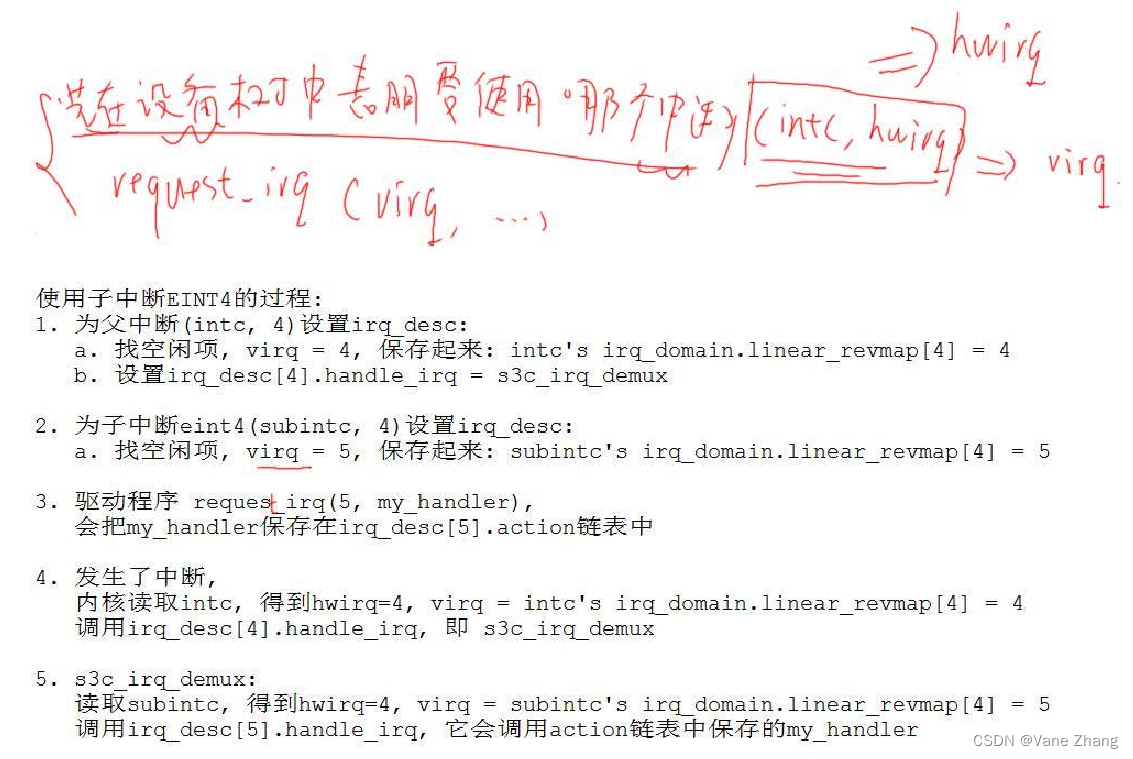
基于设备树的TQ2440的中断(1)
https://www.cnblogs.com/pengdonglin137/p/6847685.html
基于设备树的TQ2440的中断(2)
https://www.cnblogs.com/pengdonglin137/p/6848851.html
基於tiny4412的Linux內核移植 --- 实例学习中断背后的知识(1)
http://www.cnblogs.com/pengdonglin137/p/6349209.html
Linux kernel的中断子系统之(一):综述
http://www.wowotech.net/irq_subsystem/interrupt_subsystem_architecture.html
Linux kernel的中断子系统之(二):IRQ Domain介绍
linux kernel的中断子系统之(三):IRQ number和中断描述符
linux kernel的中断子系统之(四):High level irq event handler
Linux kernel中断子系统之(五):驱动申请中断API
Linux kernel的中断子系统之(六):ARM中断处理过程
linux kernel的中断子系统之(七):GIC代码分析