近期在研究USB CDC协议,使用USB Virtual Port Com功能与上位机通讯做了OTA功能。开发平台:MDK529
开发硬件:APM32F411
首先看下手册Flash分布,Flash总共8个扇区。

接下来进行Flash分区。

扇区 0 和 扇区 1做Boo区。

扇区 2做APP跳转判断区。

扇区 3到扇区 7做APP程序区。
既然分区已经分好,接下来就进行Boot代码编写。使用Virtual Port Com SDK。
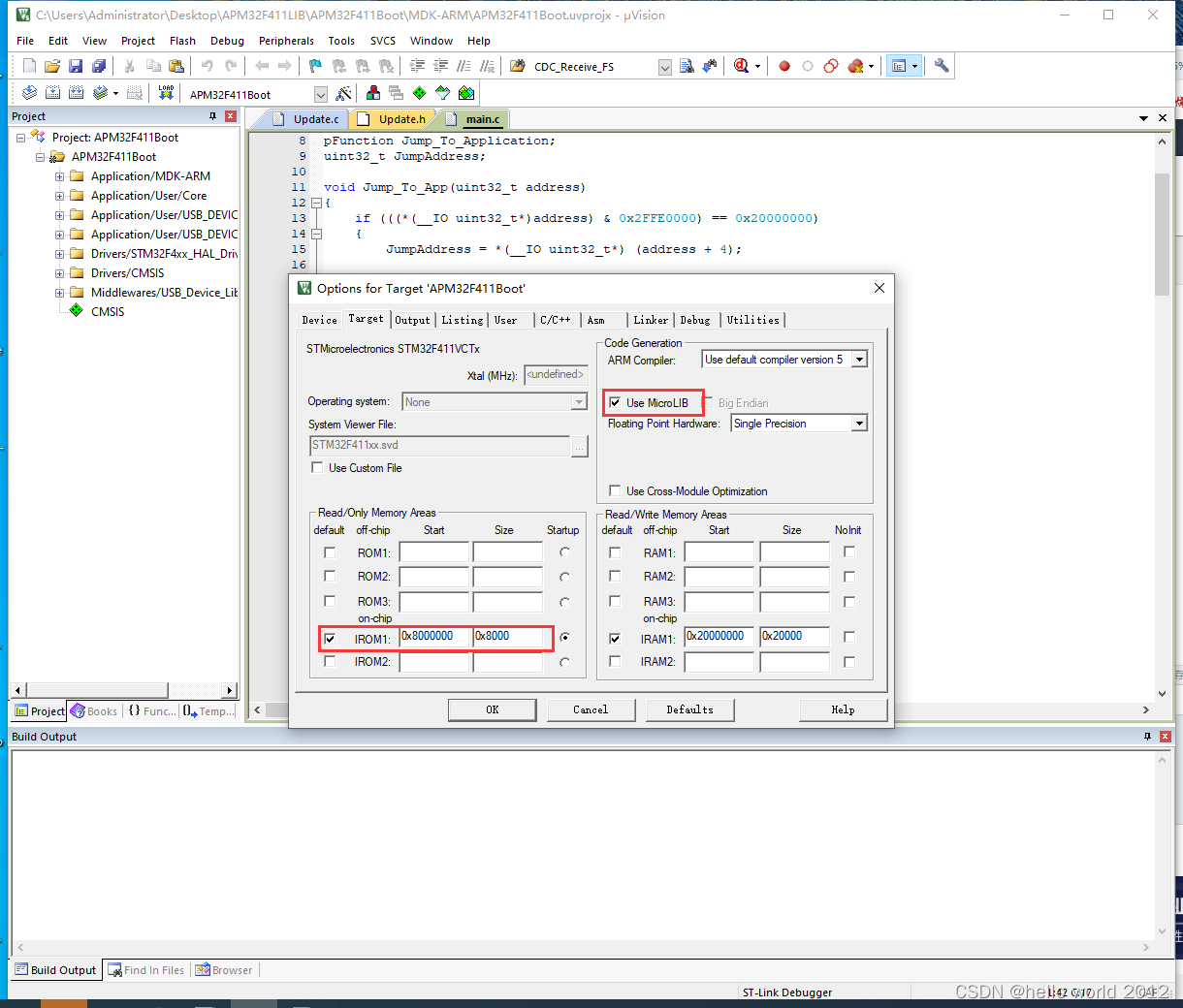
打开MDK工程,进行Flash大小设置,Flash空间占用32k。勾选使用Use Micro LIB。
对main.c文件进行修改
#include "main.h"
#include "usb_device.h"
#include "gpio.h"
#include "Update.h"
void SystemClock_Config(void);
typedef void (*pFunction)(void);
pFunction Jump_To_Application;
uint32_t JumpAddress;
void Jump_To_App(uint32_t address)
{
if (((*(__IO uint32_t*)address) & 0x2FFE0000) == 0x20000000)
{
JumpAddress = *(__IO uint32_t*) (address + 4);
Jump_To_Application = (pFunction) JumpAddress;
__set_MSP(*(__IO uint32_t*) address);
Jump_To_Application();
}
}
void USB_Disconnected(void)
{
__HAL_RCC_USB_OTG_FS_FORCE_RESET();
HAL_Delay(200);
__HAL_RCC_USB_OTG_FS_RELEASE_RESET();
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_Initure.Pin = GPIO_PIN_11 | GPIO_PIN_12;
GPIO_Initure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_Initure.Pull = GPIO_PULLDOWN;
GPIO_Initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_Initure);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_RESET);
HAL_Delay(300);
}
int main(void)
{
uint8_t R_Buff[1] = {0};
HAL_Init();
SystemClock_Config();
Read_Flash_Data(R_Buff, 1, FLASH_Updata_Flag_ADDR);
if(R_Buff[0] != 0x55)
{
USB_Disconnected();
MX_GPIO_Init();
MX_USB_DEVICE_Init();
printf("Boot Code Start\r\n");
printf("%s\r\n", Device_Version_Info_Str);
}
else
{
}
while (1)
{
if(R_Buff[0] == 0x55)
{
Jump_To_App(FLASH_APP_ADDR);
}
else
{
Data_Handler();
}
}
}
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 96;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
增加Update.c文件
#include "Update.h"
int fputc(int ch, FILE *f)
{
while(CDC_Transmit_FS((uint8_t *)&ch, 1) == USBD_BUSY);
return ch;
}
void Set_Device_Info(void)
{
uint32_t deviceserial2;
deviceserial2 = *(uint32_t *) DEVICE_ID3;
sprintf((char *)&Device_SSID_Info, "%d", deviceserial2);
strcpy((char *)Device_Name_Info, Device_Name_Info_Str);
strcpy((char *)Device_Version_Info, Device_Version_Info_Str);
}
void Write_Flash(uint8_t *data, uint16_t DataLen, uint32_t Addr)
{
uint16_t i = 0;
uint32_t Data = 0;
uint32_t temp = 0;
HAL_FLASH_Unlock();
for(i = 0; i < DataLen; i += 4)
{
Data = 0;
for(uint8_t j = 0; j < 4; j++)
{
temp = data[i + j];
Data |= temp << 8 * j;
}
if (HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, FLASH_APP_ADDR + Addr + i, Data) == HAL_OK)
{
}
}
HAL_FLASH_Lock();
}
void Write_Updata_Flag_Flash(void)
{
HAL_FLASH_Unlock();
HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, FLASH_Updata_Flag_ADDR, 0x55555555);
HAL_FLASH_Lock();
}
void Erase_Updata_Flag_Flash(void)
{
FLASH_EraseInitTypeDef EraseInitStruct;
HAL_FLASH_Unlock();
EraseInitStruct.TypeErase = FLASH_TYPEERASE_SECTORS;
EraseInitStruct.VoltageRange = FLASH_VOLTAGE_RANGE_3;
EraseInitStruct.Sector = UPDATA_FLAG_SECTOR;
EraseInitStruct.NbSectors = UPDATA_FLAG_SECTOR_NUM;
if (HAL_FLASHEx_Erase(&EraseInitStruct, &PageError) != HAL_OK)
{
}
HAL_FLASH_Lock();
}
void Erase_APP_Flash(void)
{
FLASH_EraseInitTypeDef EraseInitStruct;
HAL_FLASH_Unlock();
EraseInitStruct.TypeErase = FLASH_TYPEERASE_SECTORS;
EraseInitStruct.VoltageRange = FLASH_VOLTAGE_RANGE_3;
EraseInitStruct.Sector = UPDATA_APP_SECTOR;
EraseInitStruct.NbSectors = UPDATA_APP_SECTOR_NUM;
if (HAL_FLASHEx_Erase(&EraseInitStruct, &PageError) != HAL_OK)
{
}
HAL_FLASH_Lock();
}
void Read_Flash_Data(uint8_t* pBuffer, uint32_t NumToRead, uint32_t ReadAddr)
{
uint32_t i;
for (i = 0; i < NumToRead; i++)
{
*((uint8_t*)pBuffer + i) = *((uint8_t*)ReadAddr + i);
}
}
增加Update.h文件
#ifndef __UPDATE_H
#define __UPDATE_H
#include "main.h"
#include <string.h>
#include <stdbool.h>
#include <stdio.h>
#include "usbd_cdc_if.h"
#define ADDR_FLASH_SECTOR_0 ((uint32_t)0x08000000) /* Base [url=home.php?mod=space&uid=72445]@[/url] of Sector 0, 16 Kbytes */
#define ADDR_FLASH_SECTOR_1 ((uint32_t)0x08004000) /* Base [url=home.php?mod=space&uid=72445]@[/url] of Sector 1, 16 Kbytes */
#define ADDR_FLASH_SECTOR_2 ((uint32_t)0x08008000) /* Base [url=home.php?mod=space&uid=72445]@[/url] of Sector 2, 16 Kbytes */
#define ADDR_FLASH_SECTOR_3 ((uint32_t)0x0800C000) /* Base [url=home.php?mod=space&uid=72445]@[/url] of Sector 3, 16 Kbytes */
#define ADDR_FLASH_SECTOR_4 ((uint32_t)0x08010000) /* Base [url=home.php?mod=space&uid=72445]@[/url] of Sector 4, 64 Kbytes */
#define ADDR_FLASH_SECTOR_5 ((uint32_t)0x08020000) /* Base @ of Sector 5, 128 Kbytes */
#define ADDR_FLASH_SECTOR_6 ((uint32_t)0x08040000) /* Base @ of Sector 6, 128 Kbytes */
#define ADDR_FLASH_SECTOR_7 ((uint32_t)0x08060000) /* Base @ of Sector 7, 128 Kbytes */
#define FLASH_Updata_Flag_ADDR ADDR_FLASH_SECTOR_2
#define FLASH_APP_ADDR ADDR_FLASH_SECTOR_3
#define UPDATA_FLAG_SECTOR FLASH_SECTOR_2
#define UPDATA_FLAG_SECTOR_NUM 1
#define UPDATA_APP_SECTOR FLASH_SECTOR_3
#define UPDATA_APP_SECTOR_NUM 3
#define DEVICE_ID3 (UID_BASE + 0x8)
#define Device_Name_Info_Str "APM32F411"
#define Device_SSID_Info_Str "1234"
#define Device_Version_Info_Str "Boot V 1.0"
extern uint8_t Device_Name_Info[12];
extern uint8_t Device_SSID_Info[12];
extern uint8_t Device_Version_Info[12];
extern uint32_t PageError;
void Erase_APP_Flash(void);
void Erase_Updata_Flag_Flash(void);
void Write_Updata_Flag_Flash(void);
void Write_Flash(uint8_t *data, uint16_t DataLen, uint32_t Addr);
void Read_Flash_Data(uint8_t* pBuffer, uint32_t NumToRead, uint32_t ReadAddr);
void ClearRxQueue(void);
void OnDataReceived(uint8_t val);
void Data_Handler(void);
#endif
修改usbd_cdc_if.c文件,修改如下函数即可。
#include "Update.h"
static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len)
{
/* USER CODE BEGIN 6 */
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);
USBD_CDC_ReceivePacket(&hUsbDeviceFS);
for(int i = 0; i < *Len; i++)
{
OnDataReceived(Buf[i]);
}
return (USBD_OK);
/* USER CODE END 6 */
}
接下来进行APP代码修改。可以复制Boot代码进行修改。
对Flash起始地址和大小进行修改。

修改main.c文件
#include "main.h"
#include "usb_device.h"
#include "gpio.h"
#include "Update.h"
void SystemClock_Config(void);
void USB_Disconnected(void)
{
__HAL_RCC_USB_OTG_FS_FORCE_RESET();
HAL_Delay(200);
__HAL_RCC_USB_OTG_FS_RELEASE_RESET();
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_Initure.Pin = GPIO_PIN_11 | GPIO_PIN_12;
GPIO_Initure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_Initure.Pull = GPIO_PULLDOWN;
GPIO_Initure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_Initure);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_RESET);
HAL_Delay(300);
}
int main(void)
{
SCB->VTOR = FLASH_APP_ADDR;
HAL_Init();
SystemClock_Config();
USB_Disconnected();
MX_GPIO_Init();
MX_USB_DEVICE_Init();
printf("APP Code Start\r\n");
printf("%s\r\n", Device_Version_Info_Str);
while (1)
{
Data_Handler();
}
}
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 96;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* [url=home.php?mod=space&uid=247401]@brief[/url] Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
如上就行OTA升级的全部配置步骤。Update.h有很多宏定义可以修改。喜欢的可以下载代码自己试试。
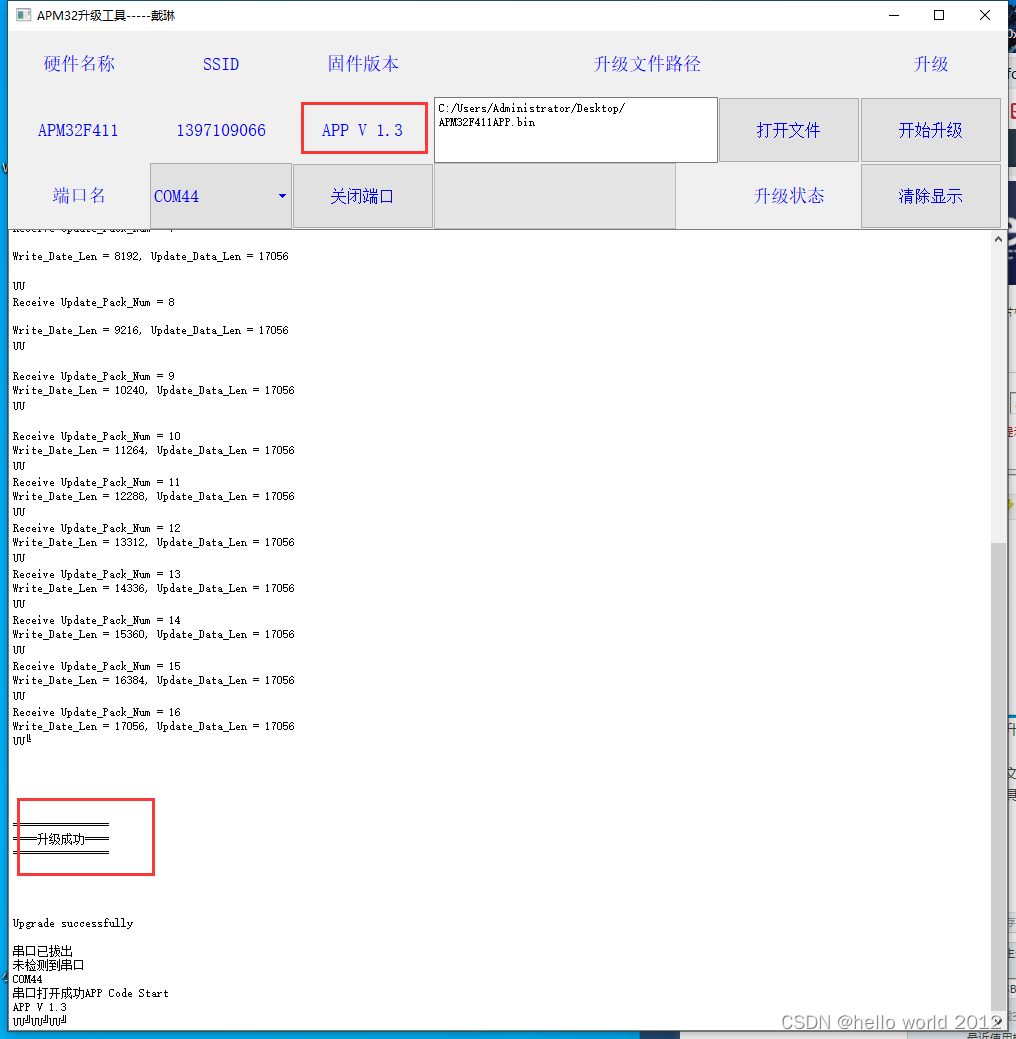
打开升级工具

打开升级文件升级后截图
下面是源码:文件太大了,我找机会再发。
下面是升级工具:文件太大了,我找机会再发。