下图是应用于智能灌溉系统驱动脉冲电动阀的H桥电路,有一个小问题。
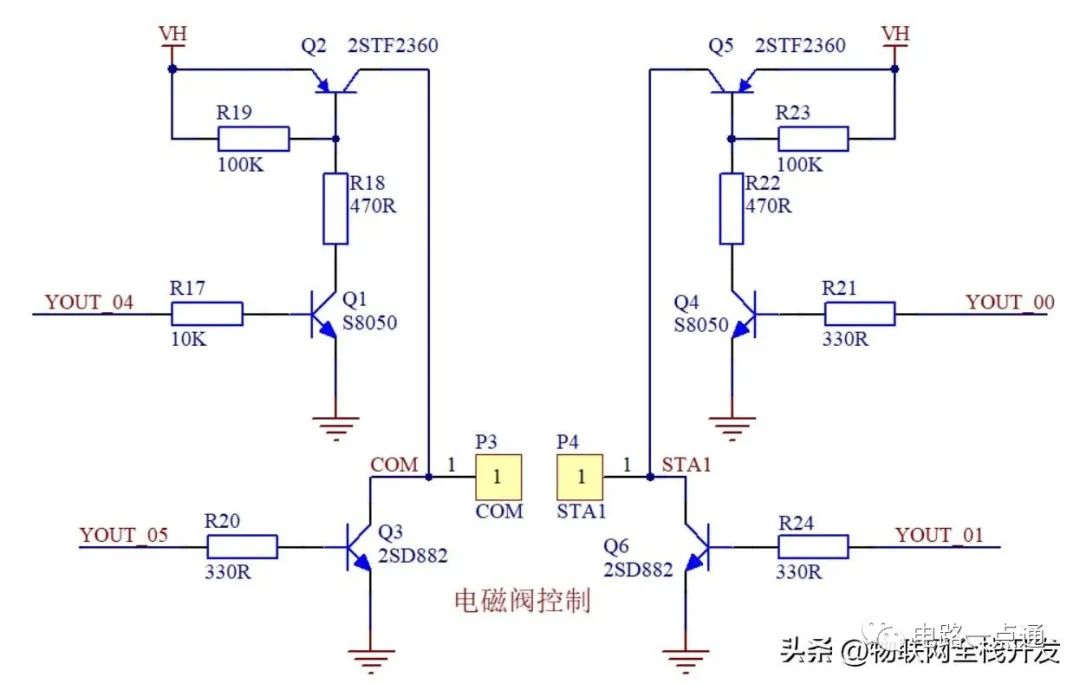
H桥驱动电路
由于电动阀的线圈呈现感性。当正向或者反向驱动信号断开时,流过线圈的电流不能突变。
在线圈两端会产生与驱动信号反相的反向电动势。
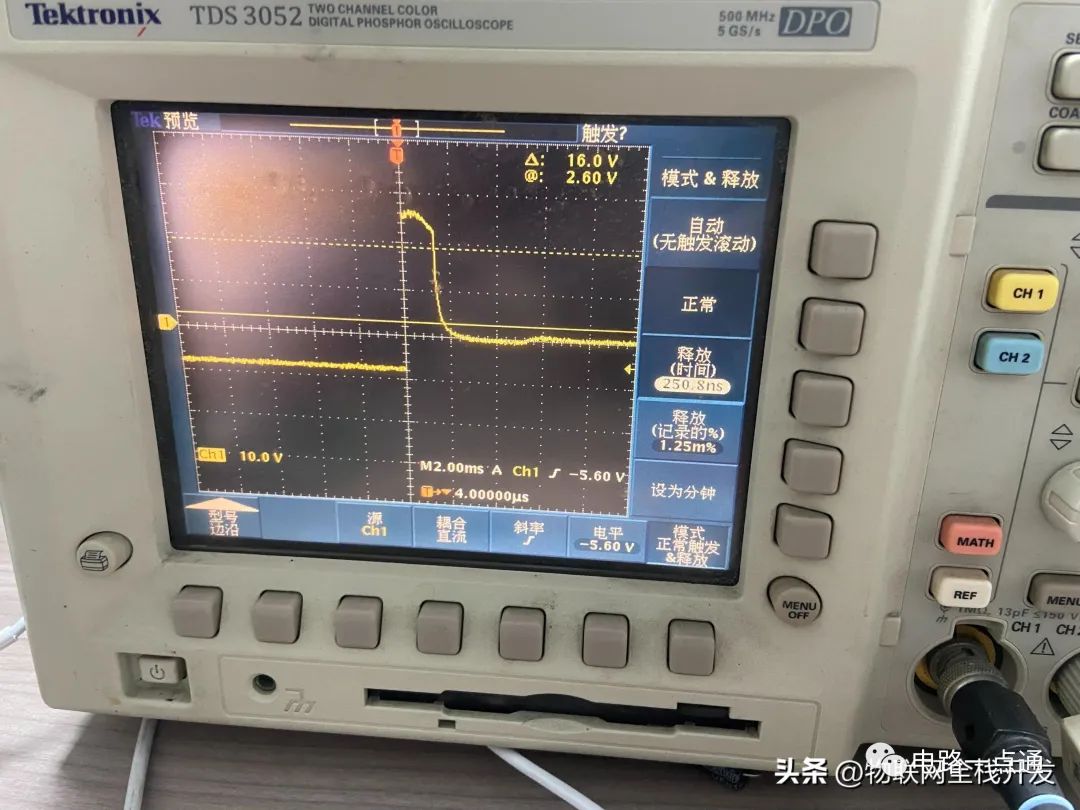
驱动信号断开时,线圈产生的反向电动势
一般的做法是在阀门的线圈两端并联双向TVS,或者两个反向串联稳压二极管。
在正反两个方向吸收瞬时大脉冲功率,并把反向电动势钳位到一定的电压。
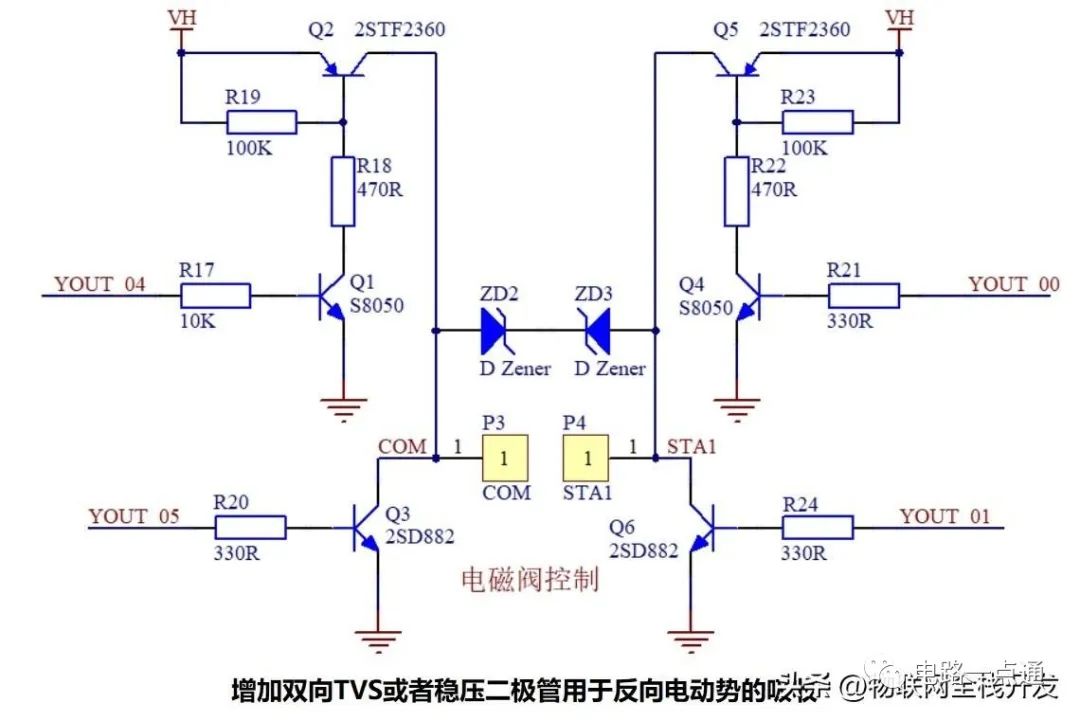
双向TVS或者反向串联稳压二极管吸收反向电动势
还有一种办法是通过并联在上下桥臂驱动管两端的二极管构成续流通路,以降低反向电动势的幅度。
如果驱动管为MOS管,则内部体寄生二极管可用于提供续流通路。
YOUT_04, YOUT_01驱动高电平,YOUT_00, YOUT_05输出低电平。
Q1,Q6导通,电流的流向为,VH->Q1的E极->Q1的C极->阀门线圈->Q6的C极->Q6的E极->参考地。
在电流的驱动下,阀门被打开。
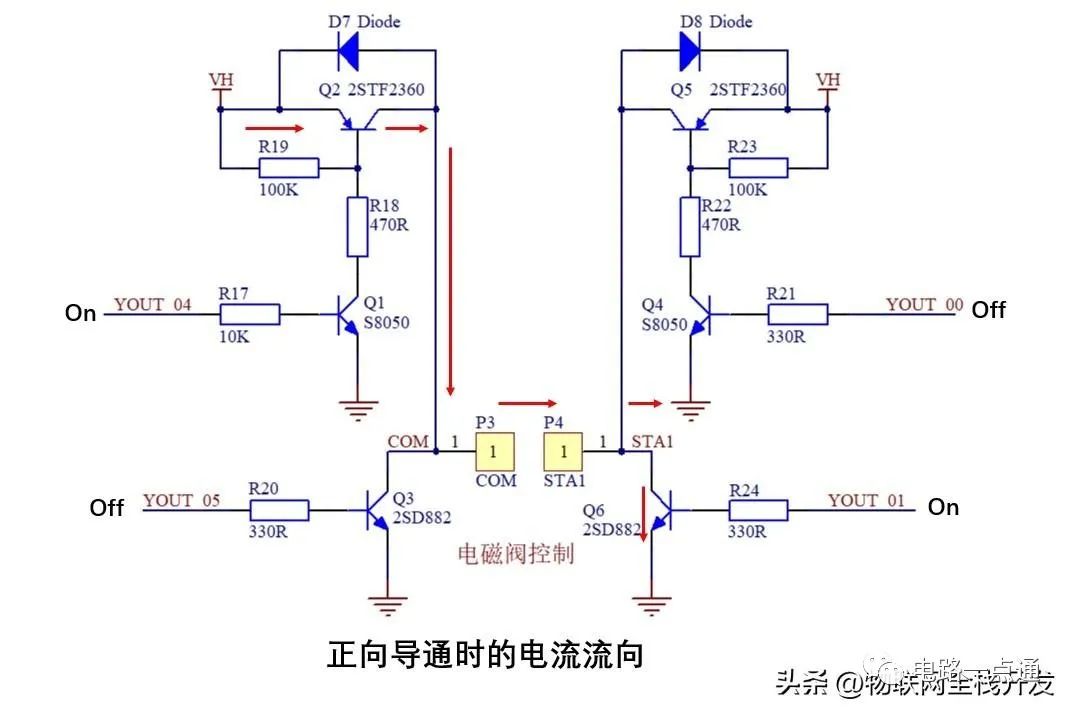
正向输出的的电流流向
断开驱动信号时,下桥臂YOUT_01首先输出低电平,关断下桥臂。
延时一段时间,大概50ms之后,上桥臂YOUT_04再输出低电平,关断上桥臂。
在这段延时时间内,流过阀门线圈的电流并不会立即切断,而是形成了
VH->Q1的E极->Q1的C极->阀门线圈->二极管D8->VH的续流通路。
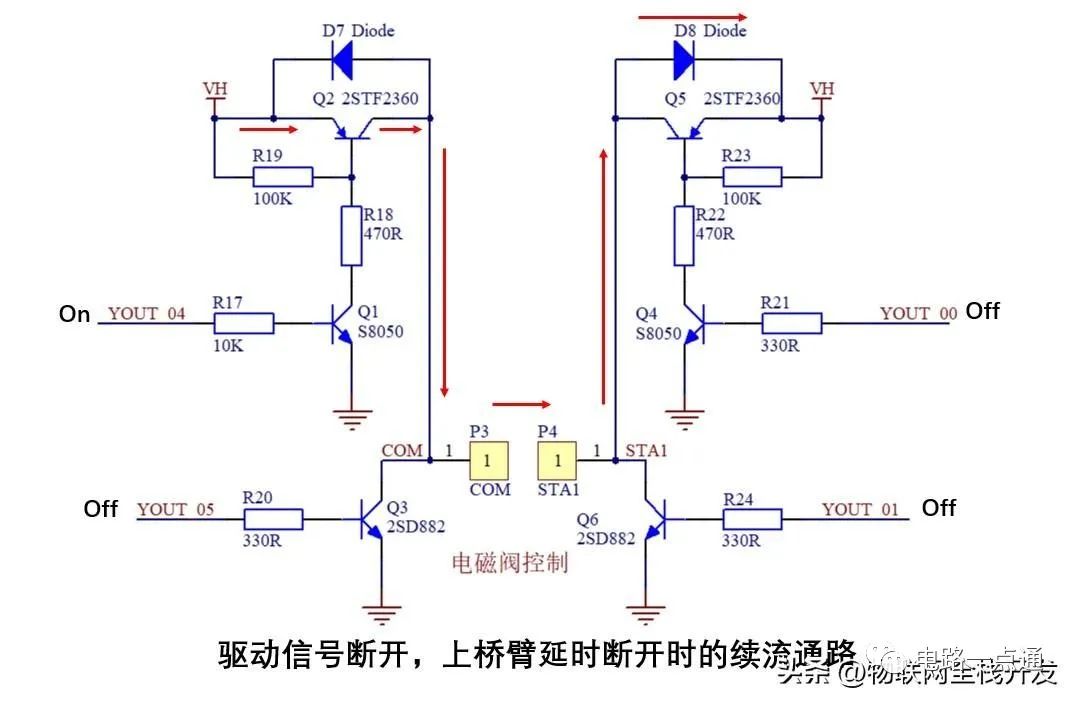
上桥臂延时关断时的电流流向
阀门线圈两压的反向电动势被钳位到二极管D8的正向导通电压。
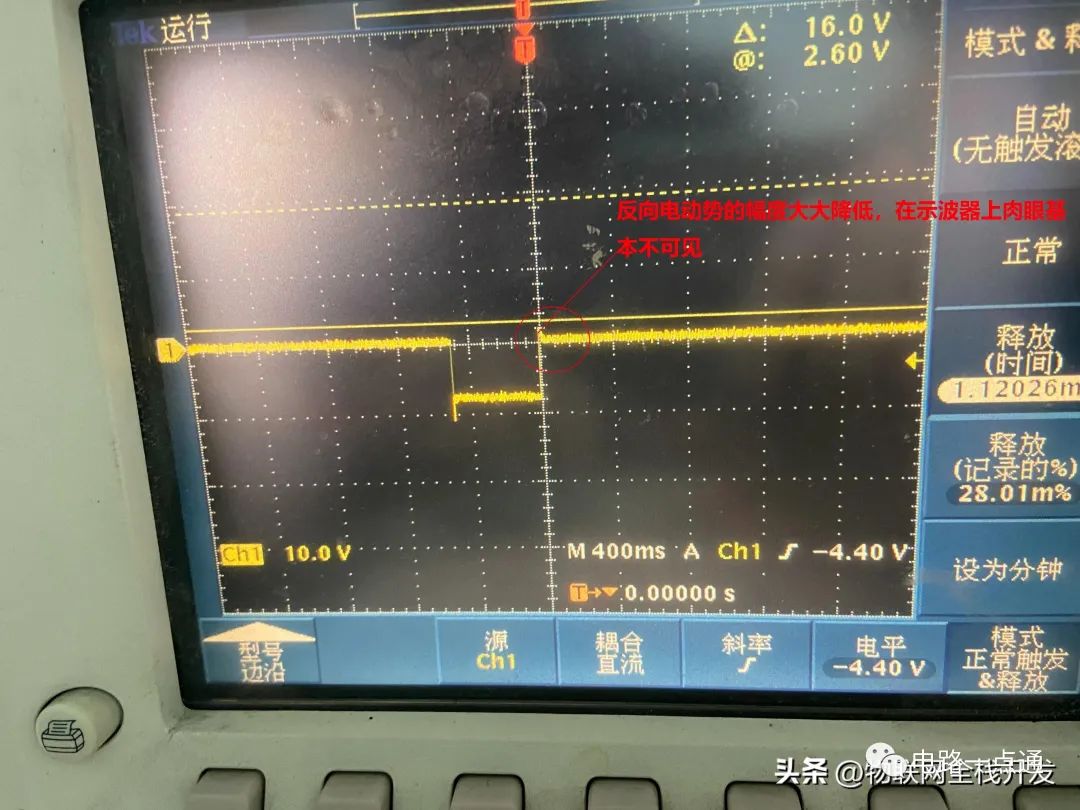
提供续流通道之后的反向电动势反之亦然!