环境:
ubuntu20.04 ros:noetic 视觉传感器:Intel RealSense D455
通过命令安装不成功后改为下面源码安装
1. 安装Intel RealSense SDK 2.0
1.1源码安装
1. 下载源码
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
2. 安装依赖项
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
3. 编译安装
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
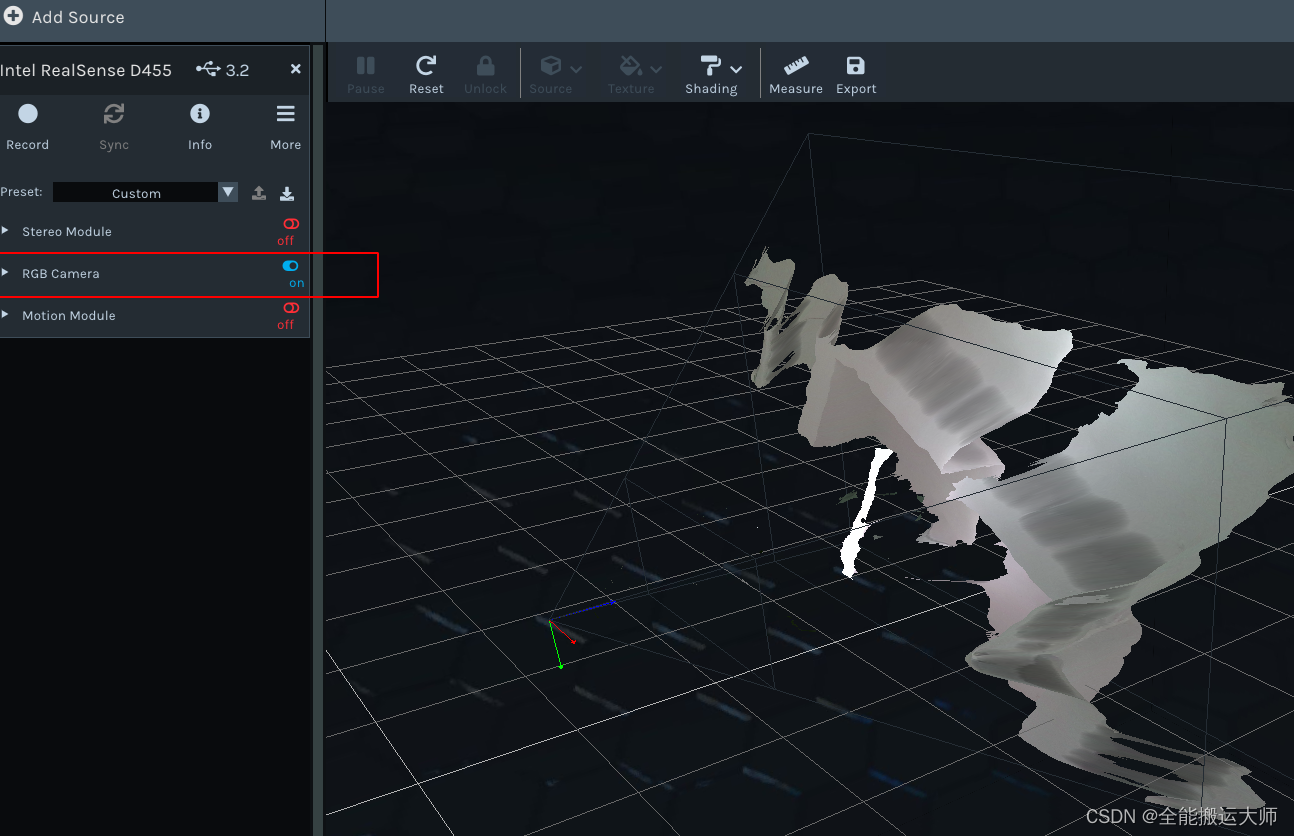
sudo make install1.2 测试
直接使用realsense-viewer工具查看效果:
realsense-viewer
2. 安装RealSense-ROS(推荐命令安装)
两种安装方式都可以,没有区别:
2.1 命令安装
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-melodic-realsense2-description2.1 源码安装RealSense-ROS
这里直接在~/catkin_ws/src目录下从github下载相关的包,然后进行编译:
mkdir src
cd src
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
3. 修改rs_camera.launch文件
无论是源码安装还是命令安装,之后修改rs_camera.launch文件都是如下方法:
只需要修改 /opt/ros/noetic/share/realsense2_camera/rs_camera.launch 文件。
4.启动相机
roslaunch realsense2_camera rs_camera.launch
这时候就能收到相机数据了。
参考:Ubuntu 20.04 配置 realsense_想要个小姑娘的博客-CSDN博客