半导体晶片机器视觉测量及MARK点视觉定位
客户的需求:
检测内容:
SMT行业晶片位置角度与PCB板Mark点位置的测试测量
检测要求:
精度0.04mm,移动速度100mm/s

视觉可行性分析:
对样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉系统进行测试测量与定位。
结果:
对所有样品进行分析,可以在不同的样品尺寸与位置下测量出晶片的大小与质心点位置、旋转角度,以及MARK点的位置等。
使用的LED光源、工业相机、工业镜头等硬件的具体信息,请参看下面的内容,默认为晶片测量、MARK点测量为独立的两套机器视觉系统,如果需要整合,可以酌情考虑删减某些硬件配置。
测试条件:
产品测试时,视场留有一定的包容空间,但这不意味着在视场内就一定能得到非常准确的测量数据。原则上需要机器视觉系统有较精密的定位与固定装置。
使用硬件:
LED光源:CSR-7060-DRLr 1个……用于晶片定位
LED光源:CSR-5060-DRLr 1个……用于Mark点
光源控制器:CSR-24T2-SPV 2个……用于控制光源
工业相机:Guppy F-033B 1个……用于晶片定位
工业相机:HV-1351UM 1个……用于Mark点
相机电缆:3米1394A线 1条……用于数据传输
相机电缆:3米USB线带锁定 1条……用于数据传输
图像采集卡:1394A卡 1块……用于采集图像
工业镜头:VS-2514 1个……用于晶片定位
工业镜头:CSR-2X110 1个……用于Mark点
光学延长管:5mm 1个……用于晶片定位
晶片安装条件:
光源工作距离:95mm,光源发光表面到目标表面的距离
相机工作距离:130mm,相机镜头表面到目标表面的距离
视场:24*18mm,实际能看到的视野大小
Mark点安装条件:
光源工作距离:85mm,光源发光表面到目标表面的距离
相机工作距离:110mm,相机镜头表面到目标表面的距离
视场:3.5*2.6mm,实际能看到的视野大小
最优化方案
在这里,我们将告诉您,为什么选择这样的硬件,选择这些硬件的有什么好处。
LED光源 CSR-7060-DRLr & CSR-5060-DRLr
晶片的检测,因为产品大小不一,大的有16mm以上的产品,小的有1mm以下的产品,因此需要一款较大一点的光源产品;经过实验,发现使用CSR-7060-DRLr光源比使用CSR-7090-DRLr更理想。这样可以提供更加集中的亮度,可以使工作距离更短,缩小机台的空间。
Mark点的检测,因为目标本身比较小,1~2mm的大小,我们使用直径为42mm的环形光源来照明,即可满足要求。
光源控制器 CSR-24T2-SPV
光源需要相应的供电设备,一般工业使用模拟控制器或数字控制器就足够了,这里我们使用凯瑞斯的频闪控制器进行供电。频闪控制器可以在10μs~999μs内使光源发出远高于正常亮度几倍的亮度,这样可以使相机在低于频闪的曝光时间内曝光正常,从而图像明亮,无拖影,对测量精度的影响非常小。而如果相机的曝光时间太长,而目标运动太快,将严重的拖影,会严重影响测量精度。我们的机台运动速度在100mm/s,即100μm/ms。如果曝光时间为1ms,则在这曝光的1ms内,物体要走100μm的距离,这对于我们测量要求的40μm的测量误差是完全不可以实现的。所以我们需要将曝光时间调整到μs级这个级别上,如果是100μs(0.1ms),则物体走过10μm,那样物体运动所引起的测量误差才会降低到系统所能接受的范围。
工业相机 Guppy F-033B & HV-1351UM
晶片视觉定位
F-033B是一款30万像素的进口工业CCD相机,使用1394A接口,在一台计算机上同时使用多台相机采集;它的速度为58FPS,可以实现高速测试测量。此款相机的分辨率为656*494,我们拍摄的视场是24*18mm,则我们系统的像素分辨率为24mm/656pixel=0.0366mm/pixel,经过我们实验,同一产品在视场中的不同位置出现如左右、前后、上下倾斜,或在视场中不同位置平移,只有不到1个像素的变化,即同一产品的重复测量精度为在0.0366mm内容,在我们要求的0.04mm范围内。因此基本在我们的要求范围内,通常我们建议相机的分辨率精度比我们要求的精度要高一倍,即我们推荐使用130万像素的工业CCD相机。推荐型号,使用Guppy F-146B(工业140万像素CCD进口相机)。如果觉得CCD工业相机成本过高,而对于测量精度没有那么高的要求,可以使用CMOS相机代替,我们推荐使用Guppy F-036B(进口30万像素CMOS相机),或者是使用HV-1351UM(国产130万像素CMOS相机)。
Mark点视觉定位
HV-1351UM是一款国产的USB接口130万像素CMOS工业相机,速度为15FPS,输出端带螺丝锁定功能,适合于安装固定在运动机构上而不会使接口松动。对于定位MARK点这样精度要求不是十分高的测试测量场合,非常适合。当然,对于晶片定位,如果要求不太高,也可以使用此款相机。
工业镜头 VST-2514 & CSR-2X110
晶片视觉定位
VST-2514H是一款大光圈的定焦百万像素镜头,对于测量尺寸成像非常好,较低的边缘枕型或桶型畸变,而且它是百万像素的镜头,与相机完全匹配。方便的对焦调节,对机台的要求不会太苛刻。使用这款镜头,可以将工作距离控制在130mm左右,对于整个机台的空间,要求比较小。由于晶片定位时,相机、镜头、光源都是在机台下面固定位置,不会来回的运动,因此,可以调整光源、对焦位置将会更方便。
Mark点视觉定位
Mark点的定位,相机、光源、镜头通常是安装在运动平台上,经常需要运动来拍照,因此当运动机构高速运动时,如果镜头、相机上有太多的螺丝接合部分时,将会有松动的可能。因此我们选择相机时,使用带锁定的相机比较理想,而镜头,我们则使用CSR-2X110远心放大镜头。这是一款2X的远心镜头,可以得到较小的视野,而且上面没有光圈、对焦调节圈,安装好后,无光学变化的担忧。
测试结果画面
同一产品不同位置测试结果:



不同产品测试结果:





Mark点测试结果:
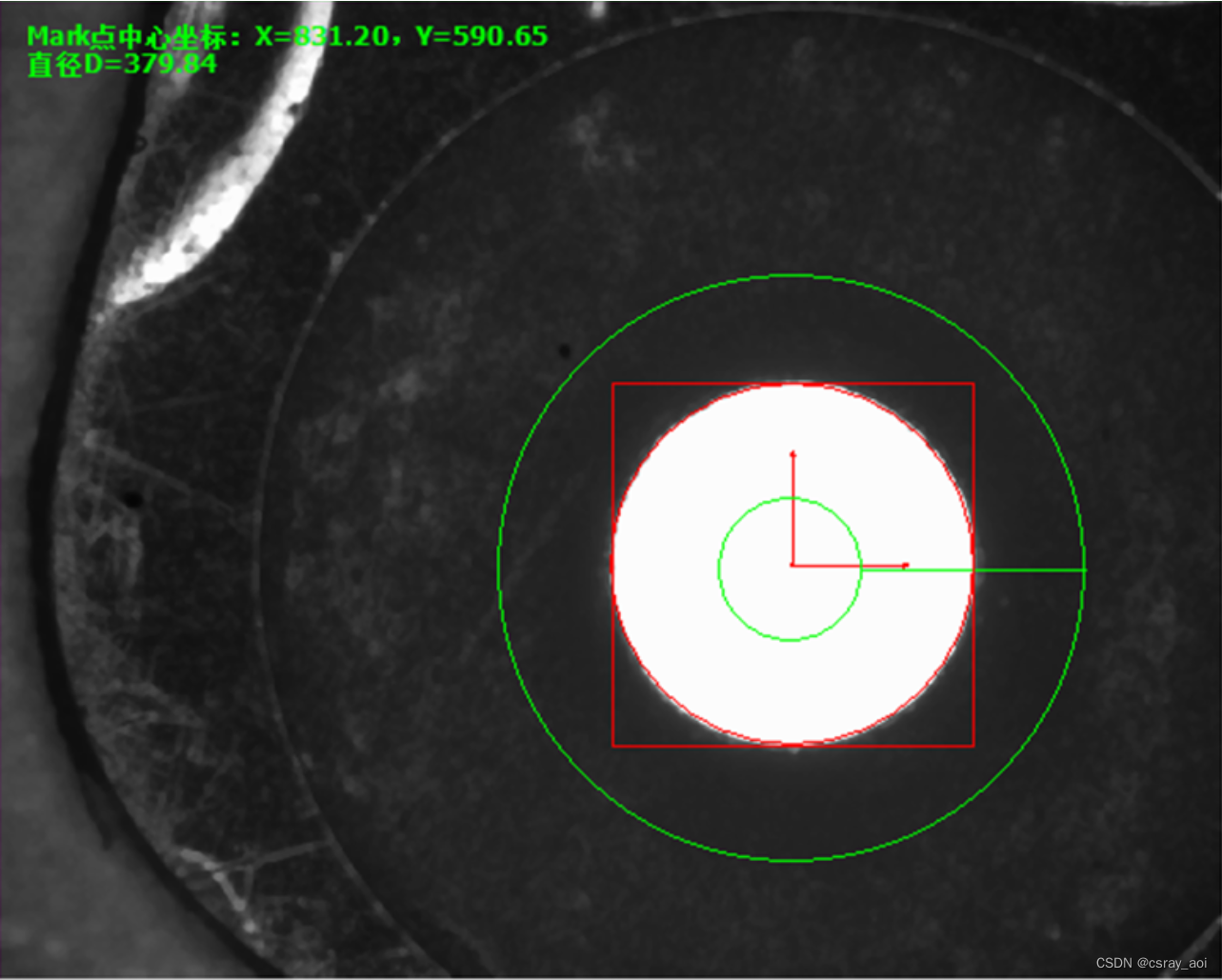
上面的组图可以看到,无论是晶片的定位还是MARK点的定位,机器视觉系统通过选用适当的硬件配置,都能达到测量要求。





![[C/C++]内存管理,对内存进行操作](https://img-blog.csdnimg.cn/2144582ed45d4b7f8a5bfb47c14de1db.png)